基于AMCUSUM 的道路交通事件检测方法
2023-10-21齐德全魏思琪
齐德全,魏思琪
(长春理工大学 数学与统计学院,长春 130022)
统计过程控制(Statistical Process Control,SPC)是保证产品与服务符合规定的要求的一种质量管理技术,可以为“优质”提供质量技术上的指导与帮助。SPC 的一个有效工具是控制图,包括适用于检测大漂移的休哈特(Shewhart)控制图,适用于检测中小漂移的累积和(Cumulative Sum,CUSUM)控制图与指数加权滑动平均(Exponentially Weighted Moving Average,EWMA)控制图。目前SPC 不仅被广泛应用于工业生产过程,而且也被用于医疗器械[1]、电子元器[2]、烟草生产[3]及图像处理[4]等诸多领域[5-6],其研究成果和应用成果已十分丰富,并取得了很好的社会效益和经济效益。
在智能交通领域,CUSUM 控制图被大量国内外学者广泛应用于交通事件检测。目前对于交通事件的检测,除了视频检测这种直观检测外,还有基于固定线圈检测器或浮动车技术展开的研究。基于固定源数据的交通事件检测大多基于路面的点数据,如交通流量、速度、占有率等,典型的方法有加利福尼亚算法[7]、标准偏差算法(SDN)[8]和CUSUM 控制图[9]等。典型的基于移动源数据的交通事件检测方法有TRANSMIT算法[10]与CUSUM 控制图[11]等。这里所用的CUSUM 控制图都是一元的或多元CUSUM 的复合,没有用到变量间的相关性。更多的研究方法见综述文献[12]。
对CUSUM 控制图,当设计参数是实际漂移大小的一半时,CUSUM 控制图的表现最佳,当实际漂移大小不是设计参数所考虑的情况时,CUSUM 控制图会有很糟糕的表现。但在实际应用过程当中,很难准确地知道漂移的大小。为了解决这一问题,文献中提出了具有自适应的CUSUM 控制图[13],即控制图参数在整个监控过程当中不是一成不变的,而是由观测值来决定。这就使得过程漂移未知时,控制图仍有非常好的表现。
针对以上两个问题,建立了自适应的多元CUSUM 控制图(AMCUSUM)用于基于固定源数据的交通事件检测。借助VISSIM4.3 软件模拟交通数据,把所提出的方法与经典的加利福尼亚算法和SDN 算法进行比较,统计模拟表明所提出的方法检测效果较好。最后,利用2015 年杭州市上塘高架至中河高架的实测数据对AMCUSUM 方法进行了实证分析,效果优于加利福尼亚算法和SDN 算法。
1 基于AMCUSUM 控制图的交通事件检测
基于固定源数据的交通事件检测大多基于交通流量、速度、占有率等数据,有文献[14]研究表明交通流服从正态分布。假设用于交通事件检测的数据来自p元正态总体Np(μ,Σ) 。在每个时刻t,根据样本Xt监控以下假设H0:μ=μ0,H1:μ≠μ0。参考Dai 等人[15]提出的自适应多元CUSUM 控制图,建立了如下的AMCUSUM 方法。当数据非正态时,中心极限定理保证了该控制图也有一定的监控效果。
首先,计算指数加权滑动平均(EWMA)统计量为:
其中,e0= 0(t= 0);r∈(0,1) 是光滑参数,r越小对监控小漂移越有效,越大对监控大漂移越有效。然后估计发生实际漂移的大小:
其中,λmin为事先给定的感兴趣的最小漂移量。(λt)2为:
再把设计参数k*t>0 取为实际漂移大小的一半,即,计算多元CUSUM 统计量:
当yt*>H*时,AMCUSUM 控制图发出过程失控的警报。此时应采取相应解决措施,避免交通事件给道路造成严重堵塞和二次事故的发生。其中,H*是控制线,是k*t的递减函数,除以相应的值来调整yt*,使得控制线H*的值接近于1。
交通事件的检测步骤为:
(1)车辆检测器传输实时数据,进行适当的数据处理。
(2)计算AMCUSUM 监控统计量,当统计量大于预先定好的阈值H*时,触发交通事件预警报。
(3)确认现场是否发生交通事件,若发生则立即派出救援,若没有发生,预警报解除,重新回到步骤(1)进行检测。
针对上述步骤绘制交通事件检测处理流程,如图1 所示。
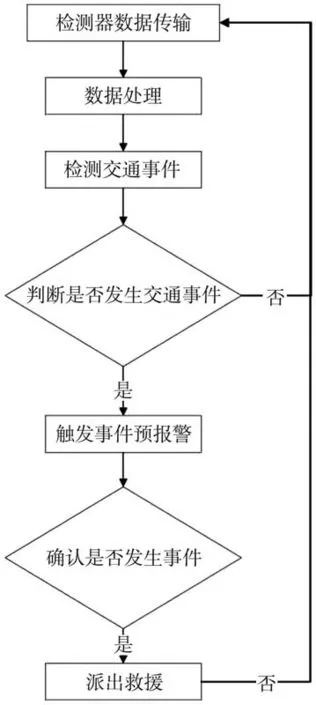
图1 交通事件检测处理流程
当发生交通事件时,道路上的交通状况发生改变,车流占有率也会随之改变,此时就会在车流中形成可以传播的交通波,也称之为车流波。车流波根据前后区域的占有率和流量变化,主要分为集结波、消散波、启动波和停止波。道路上的交通量存在时空相关性[16],根据交通波动理论,建议选取道路上游和下游在同一时刻的车辆占有率的差和车辆速度的差两个变量进行监控。这样不仅可以放大交通事件对车辆占有率和车辆速度的影响,还可以达到把事件结束后车流消散过程产生的消散波抵消掉的目的,而且可以降低车流量早高峰或晚高峰带来的影响。
2 仿真与分析
目前,国内外常用的事件检测评价指标有检测率(DR)、误报率(FAR)和平均检测时间(MTTD)。将这三个指标结合,通过统计模拟来比较所提出的AMCUSUM 方法、经典的加利福尼亚算法和SDN 的算法性能。借助VISSIM4.3 软件进行实验仿真,VISSIM 是一种微观的、基于时间间隔和驾驶行为的仿真建模工具,用以城市交通和公共交通运行的交通建模。由于交通事件造成的堵塞情况会受到正常情况下车流量大小以及交通事件发生位置的影响,根据这两个变量设置不同的道路情况,分析交通事件检测方法在不同情形下的检测效率。
仿真实验设定道路长度为1 000 m 的单向3车道,车道宽度为3.5 m,在道路200 m 和800 m处分别设置3 个检测器,间隔为600 m,设定事故发生地点在上下游检测器之间,检测器用于记录事故发生地点上、下游各车道的交通流数据,如图2 所示。

图2 检测器布置示意图
在仿真实验中,大小型车的比例分别为10%和90%,对不同车型的期望速度进行参数设置,通过设置停车位和减速带模拟交通事件,设定事件发生时造成两车道堵塞,对路段总体的通行能力影响为67%,道路中输入的交通流量分别为高峰(4 000 veh/h)和平峰(2 000 veh/h),事故发生路段位置分别为前中段(距上游检测器180 m)和中后段(距上游检测器420 m),事故持续时间为20 min。高峰和平峰两种交通流量在无交通事件下各运行20 次,分别计算上下游的占有率差和速度差,估计两变量在系统可控时的均值向量和协方差阵。在每种交通事故状态下,设置仿真参数的随机种子为100,每种情况仿真100 次,这样通过VISSIM 仿真共获得400 组原始的交通检测数据,前15 min 为路网预热,从第15 分钟开始记录数据,每隔30 s 记录一次数据,每种情况各运行1.5 h。
综合考虑交通事件导致均值向量偏移量的大小,设定AMCUSUM 控制图的偏移范围(λmin,λmax)为(0.5,2.5 ),取,光滑参数r= 0.2。采取蒙特卡罗法模拟10 000 次,取阈值H*= 1.058 时使得可控时的平均运行长度ARL0=200。加州算法是双截面算法,当交通事件发生时,上游检测器占有率增加,下游检测器占有率减小,对上下游占有率进行三次测试,当交通事件导致的交通流参数变化导致三次测试均大于阈值时模型发出警报。标准偏差算法(SDN)通过判断交通参数的变化率是否大于指定的阈值来检测交通事件,当超过阈值时报警。对上述算法进行同样的仿真实验,分别模拟道路中输入的交通流量为高峰(4 000 veh/h)和平峰(2 000 veh/h)的情况,得出的对比结论如表1 所示。分别模拟交通事件发生位置在道路前中段和中后段的情况,得出的对比结论如表2 所示。
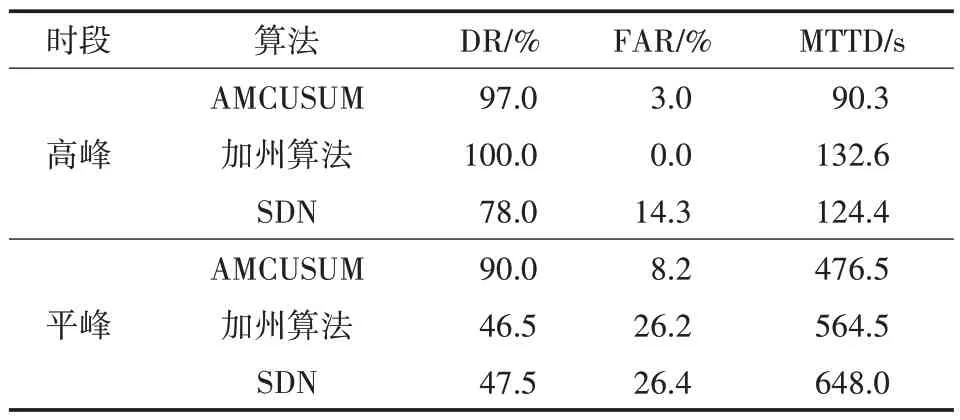
表1 不同时段不同车流量下算法的效率对比
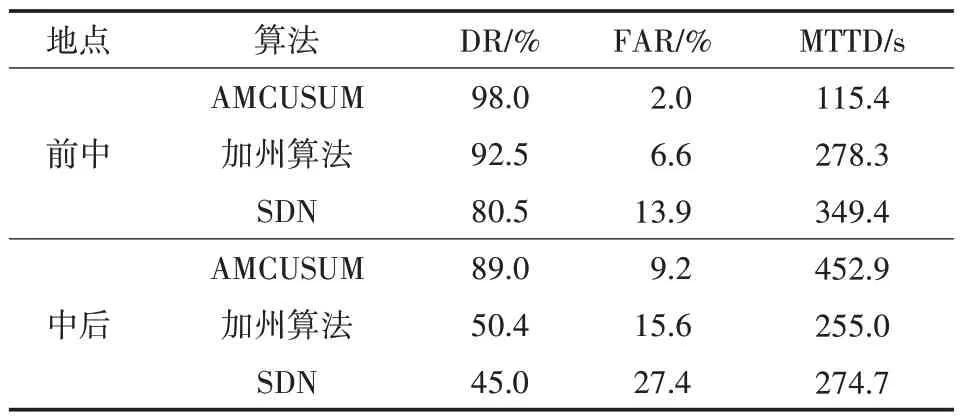
表2 不同事件发生地点下算法的效率对比
从表1 可知,所有算法高峰时段的检测效果均优于平峰时段。高峰时段的车流量大,当发生交通事件时,更容易发生交通拥堵,造成车辆的排队现象,交通流参数的均值向量变化明显,故检测率高、误报率低且平均检测时间短,可以快速检测到事件的发生。而平峰时段的车流量小,模型的检测率降低,误报率升高,总体效率受到很大影响。
从表2 可知,所有算法前中段发生交通事件的检测效果优于中后段。可以看出,当前中段地点发生交通事件时,即使在平峰时段,也依旧拥有高检测率、低误报率和较低的平均检测时间。而若在中后段发生交通事故时,当交通堵塞引起的道路通过能力不能使得低车流量时段发生排队现象时,检测率相比前中段降低很多,误报率升高,且平均检测时间过长,检测效果不理想。
从上述对比实验的结果可以看出在交通量处于平峰时段时、交通事件发生在检测器间道路的中后段时,加州算法和SDN 检测率明显降低,误报率明显升高。以平峰情况为例,加州算法和SDN 法的检测率均不到50%,而误报率达到了25%以上,且检测时间比AMCUSUM 方法更长。综合比较,基于AMCUSUM 的检测方法不论在何种情况下都能保持较高的检测率、较低的误报率和较短的检测时间,可以认为基于AMCUSUM的检测方法检测效果优于加州算法和SDN 方法,检测效果更好。
3 实证分析
选取杭州市上塘高架至中河高架路段上3个交通微波检测器4 个月的(2015 年7 月12 日至11 月22 日)实测数据,数据来自Openits 联盟官网,数据包含车道上车流量、占有率和速度,数据采集间隔为5 min。微波检测器的位置图如图3 所示。人工筛选出在这区域4 个月内的40 起交通事故,部分事故情况如表3 所示。
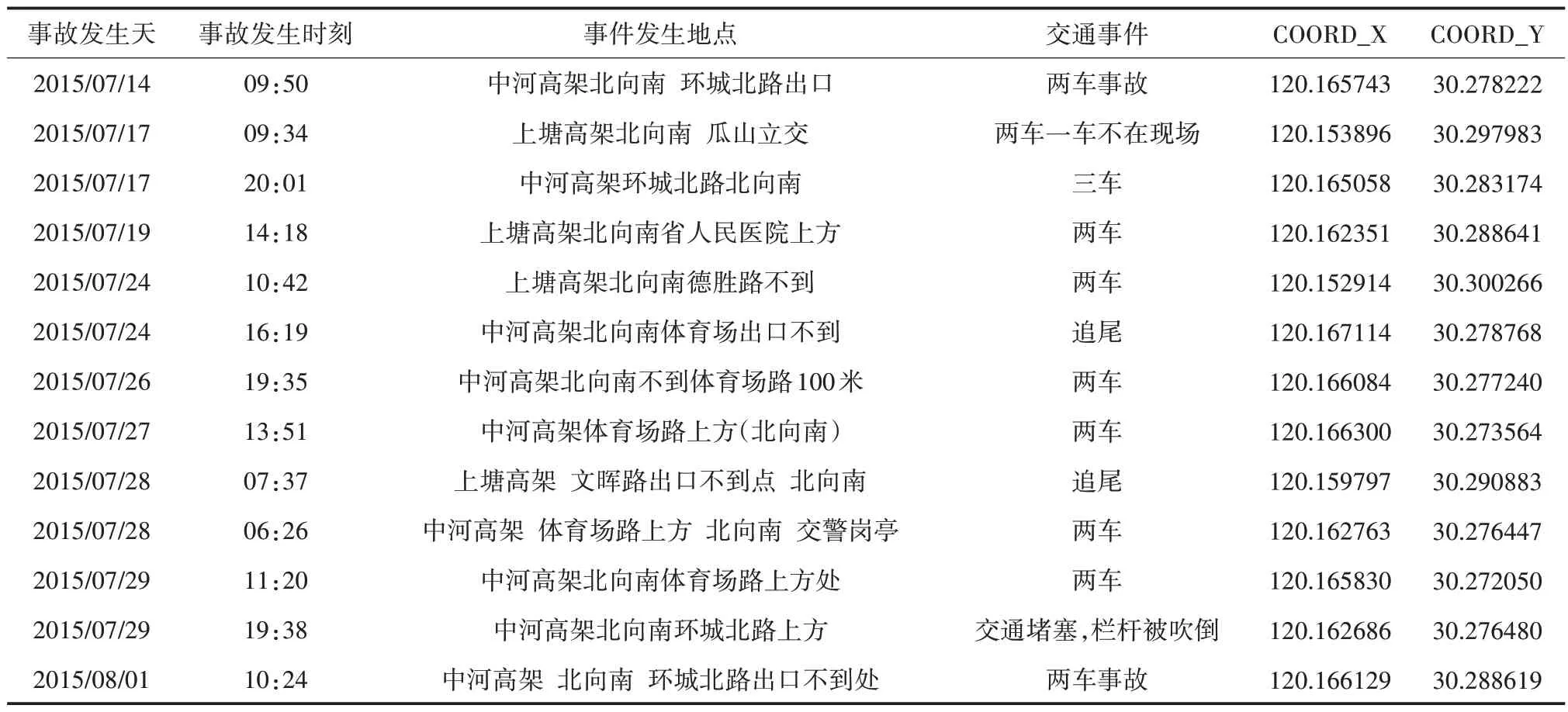
表3 部分事故信息

图3 微波检测器位置
经过分析数据可知,城市道路交通流属于间断交通流,一般会在15~60 min 内保持一个比较稳定的状态,在工作日和休息日的某些固定时段会分别呈现大致相同的交通流趋势,但每天的交通流数据具有唯一性,将以往同时段的交通流数据结合实时的路段车流情况,以此来估计道路正常状态下的占有率和速度数值,当路段的交通流处于稳定状态时进行道路交通事件检测。由于数据的采集间隔为5 min,时间间隔较长,故不考虑检测时间这一指标。经过对杭州市上塘高架至中河高架路段上的实际数据进行分析,估计出过程可控时的协方差阵Σ 为,进一步得出AMCUSUM 方法、加州算法和SDN 算法的检测率分别为72.5%、42.5%和62.5%。由实证分析可知,所提出的AMCUSUM方法优于经典的加利福尼亚算法和SDN 算法。
4 结论
基于固定源数据的交通事件检测大多基于路面的点数据,如交通流量、速度、占有率等,典型的方法有加利福尼亚算法、标准偏差算法(SDN)和CUSUM 控制图。现有的基于CUSUM 的道路交通事件检测方法都是一元的或多元CUSUM 控制图的复合,没有用到变量间的相关性,而且检测效果受到设计参数的显著影响。通过分析交通事件发生与结束过程后向上下游传递的车流波状态,选取上下游车辆占有率差和速度差作为监控变量,建立了自适应的多元CUSUM 的道路交通事件检测方法(AMCUSUM)。通过VISSIM 软件进行仿真,对道路交通事件进行检测,可以得出以下结论:
(1)道路上车流量越大,模型的检测时间越快,效果越好,交通事件发生位置位于两检测器间路段中上游时的模型监测效果优于中下游。
(2)基于AMCUSUM 控制图的检测效果优于加州算法和SDN 方法,拥有更高的检测率、更低的误报率和更短的检测时间。
当车流量较小且事件发生位置距离上游检测器较远时,AMCUSUM 的平均检测时间较长。如何提高AMCUSUM 的检测效率和基于移动源数据的交通事件检测方法是下一阶段的研究目标。