电动汽车控制系统研究
2023-10-21贾瑞潘秉钰王金鑫
贾瑞 潘秉钰 王金鑫
摘 要:随着电动汽车控制技术和电子控制单元(ECU)的发展,如何优化车辆控制性能成为了决定电动汽车设计水平的关键。为了实现对系统内的车辆部件进行合理、协调的综合控制,本文基于模块化思想,通过构建分布式控制网络,设计了纯电动汽车控制系统的整体结构,对车辆控制器的工作原理和功能实现进行了分析,为纯电动汽车的控制系统的性能评价提供了理论依据。
关键词:电动汽车 车辆控制系统 整车控制器
1 引言
现代电动汽车的研究和开发是基于现代控制技术的理论,包括汽车技术、电机驱动技术、电力电子技术和储能技术等。
电动汽车设计过程中需要解决的三大问题,分别是整车技术、电力驱动技术和能源管理技术。其中,整车技术包括两个方面:一是车身技术,主要是通过减轻电动汽车车身重量,实现加速和爬坡能力提升,有效增加行驶距离;二是整车控制系统集成控制技术,主要是对电动汽车的电子控制单元进行合理布置和协调,节省材料和降低成本,实现系统在控制过程中的优化,提高车辆性能[1]。
在传统燃油汽车中,发动机管理系统控制发动机在满足排放法规的前提下,提高燃油经济性和驾驶性能;对于纯电动汽车,动力电池代替燃油作为动力来源,取代了原有的发动机,因此,纯电动汽车还需要一个车辆控制系统优化能量的分配以提高行驶里程。而车辆控制系统对车辆行驶性能有着重要影响,是纯电动汽车控制技术研究的重要内容[2]。
2 系统设计需求分析
纯电动汽车控制系统集成了包括电机、变流器、动力电池、变速器等在内的各种电控设备,是一个集电气、电子、机械、化学等于一体的非线性动态系统。因此,无论电动汽车的其他装配性能如何,即使都处于良好状态、一旦整车控制器出现问题,车辆将无法正常运行,无法实现能量回收控制,甚至发生事故。如何协调各部分功能单元,使之合理、高效地工作成为纯电动汽车控制系统设计的一个非常棘手的问题。
基于国内外车辆控制系统的研究现状,针对车辆控制技术发展过程中存在的一些问题,本文构建了车辆控制系统的整体框架,对车辆控制器的工作原理进行了分析,最终确定了其功能。
3 车辆控制网络架构
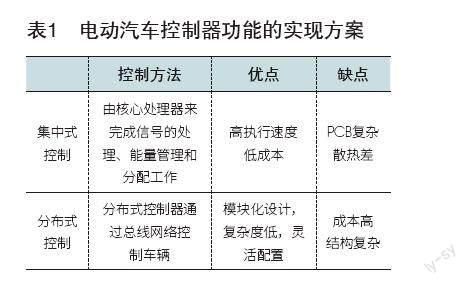
一般来说,纯电动汽车控制器的功能实现方案有两种:集中式控制和分布式控制,如表1所示。
由于CAN总线越来越多地应用于分布式控制系统,结合表1提供的两种控制方案的分析,本研究采用了基于CAN总线的分布式控制系统。
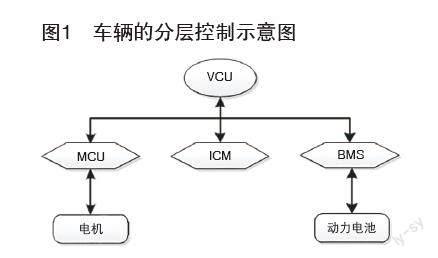
基于模块化结构的分布式控制系统可提高车辆各子系统之间的关联性。该系统可分为两层:整车控制器和二级控制器。如图1所示,其中,整车控制器(VCU)作为处理信息和发布指令的顶层,二级控制器中的电机控制器(MCU)、车辆组合仪表(ICM)和电池管理系统(BMS)对各自的控制对象进行管理和监控。各级实时状态参数子系统将采集到的信息通过CAN总线实现共享交换给VCU,再由VCU进行信息综合,在各级控制器之间实现集中与分散的控制功能、信息交互功能[3-4]。
4 电动汽车控制系统概述
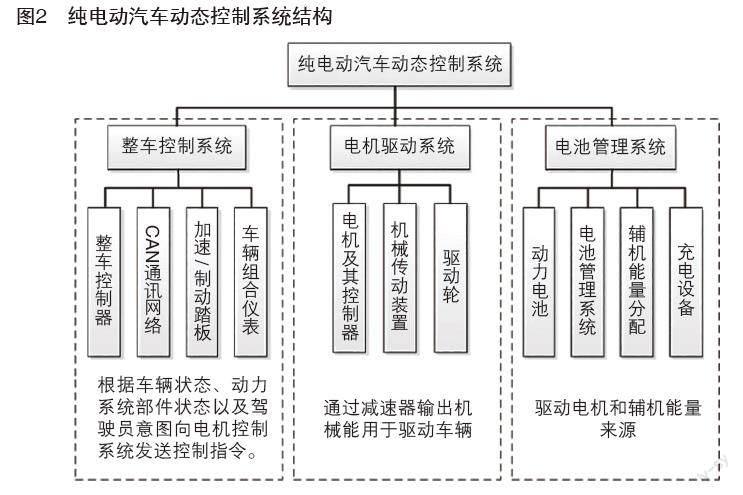
纯电动汽车动态控制系统可分为三部分,分别为车辆控制系统、电机驱动系统和电池管理系统,如图2所示。整车控制器作为衡量车辆控制系统性能和功能水平的车辆控制系统核心部件,其功能实现程度直接影响整车控制系统的控制效果[5]。
车载控制器作为纯电动汽车控制系统中最重要的核心部分,负责整体控制、协调和监控车辆的运行状态,将总线信号和传感器信号通过控制策略,传递给二级电子控制单元,实现能量管理、故障诊断和对车辆运行状态的控制、监控等功能,并通过液晶汽车仪表显示。车辆控制器架构如图3所示。
5 整车控制系统的工作原理
车辆控制系统是一个闭环控制系统,按执行任务的层次可分为三层:驾驶员意图层,根据驾驶员驾驶需要,将油门踏板、刹车踏板、挡位等发送给整车控制器;协调层,根据车辆控制器处理的实时状态信息和控制指令对驾驶员的操作企图进行合理判断;执行层,处理由车辆控制器做出的相关控制指令。为了提高整车控制系统的安全稳定性,要依靠系统的控制误差进行反馈修正。图4展示了整车控制器的工作原理。
纯电动汽车的充电是通过地面上的充电设备完成的,当驾驶员使用钥匙启动开关时,动力电池通过DC/DC转换为辅助电源,为仪表和照明等低压电器设备提供能量。同时,通过动力电池向电机控制器供电,逆变器将直流电压转换为三相交流电供电机运行,然后经过变速器、旋转轴、差速器和后桥驱动车辆。整车控制器通过控制驱动电机实现前进或后退[6]。
当车辆启动时,驾驶员首先将挡位选择在 “前进”或“后退”位置,然后踩下加速踏板。当加速踏板离开初始位置后,驾驶员可以通过改变加速踏板的开度来完成行驶扭矩的给定值变化。VCU采集到该信号,经过扭矩管理后发送给电机控制器。当电机控制器收到控制信号和驱动力矩给定值时,控制其运行,能量流向电机,并根据控制信号确定电机的旋转方向,同时根据给定值确定电机的转速,根据驱动转矩信号给定值来确定电机的转矩。
純电动汽车的制动方式分为两种:紧急制动和应急制动。前者一般依靠机械制动系统进行制动;后者通常由机械制动和电机再生制动组成。当需要使用较小的制动强度时,制动系统将以再生制动为主,机械制动为辅;当二级制动强度时,制动系统将以机械制动为主,再生制动为辅。
当驾驶员踩下制动踏板制动,制动踏板偏离初始位置时,VCU采集到该信号,经过扭矩管理后发送给电机控制器。电机控制器会结合控制信号、制动水平和制动力矩给定值三个指标来控制电机的制动状态功率,并根据制动力矩给定值信号来确定电机输出制动力矩的大小,同时开启再生制动,给动力电池供电。当抬起制动踏板时,制动状态信号消失,制动力矩给定值也恢复为零,这时电机控制器停止制动力矩的输出。当车辆在减速模式下运行时,电机作为发电机将机械能转换为化学能为电池供电,以增加纯电动汽车的续航里程。
6 整车控制系统的主要功能
整车控制器作为纯电动汽车的核心控制器,对车辆的运行管理和各相关ECU的控制起着至关重要的作用。由于电控单元对各部分的控制功能不同,原来复杂的控制系统可以分解成相对简单的单个子系统,然后基于模块化思想明确每个模块可以实现的功能。
一方面,它通过传感器接收驾驶员传输的驾驶意图数据和指令,并按照控制策略进行处理和分析,然后向电机控制单元、电池管理系统和汽车仪表盘控制单元发送控制指令,同时对车辆运行状态进行实时监控;另一方面,在纯电动汽车制动过程中对制动能量进行回馈控制,进而提高纯电动汽车的续航里程。车辆控制器的电子控制单元利用CAN总线和其他数据信息来传递控制指令。车辆控制器被视为车辆通信网络的中心节点,以提高数据传输率和可靠性。
该车辆控制器实现的主要功能有:
(1)驱动力矩控制
驱动力矩的控制,作为整车控制器最基本、最重要的功能,通过收集踏板信息,然后解析驾驶员的操作意图,实现对电机输出力矩需求的计算。在这个过程中,驾驶员通过操纵油门或制动踏板来实现信号输入,也就是将驾驶员的操作目的以信号的形式传递给整车控制器,然后通过分析处理后由机动车控制器根据驾驶员的心理意图输出驱动力矩或制动力矩。
(2)制动能量优化控制
纯电动汽车与传统汽车相比,主要区别之一是制动能量的回收。电机作为唯一的动力输出并具有电机和发电机两种功能——当驾驶员踩下油门踏板驱动车辆时,电机的功能相当于电动机;相反,当驾驶员踩下制动踏板减速行驶时,电机的功能相当于发电机,也就是利用电动汽车的制动能量发电并储存到储能装置中,当满足一定条件时,又将能量输送到电池组中。在这个过程中,车辆控制器根据加速踏板开度、制动踏板开度、当前速度以及动力电池的荷电状态(SOC)来确定是否在某一时刻回收制动能量,提高能量利用效率。
(3)车辆能量管理
在纯电动汽车发展过程中,动力电池除了向驱动系统供电外,还向转向电机、空调等汽车电气设备供电。为了延长续航里程,整车控制器可以对能源进行合理的优化,当电池电量不足时,发出关闭部分辅助电器设备的控制指令,从而保证车辆用电的安全性,进而提高能源利用率。
(4)CAN网络的维护和管理
整车控制器作为通信网络的主节点,同时也对车载网络进行管理,该通信网络基于CAN总线技术,拥有多个主从节点,对车载网络状态进行实时调节,并具有信息动态分配的优先权。
(5) 故障诊断与处理
整车控制器可以连续实时监测车辆运行状态,包括各部件ECU的工作情况,一旦电子控制单元出现故障首先及时报警,在采取安全措施的同时,再进行故障诊断,存储并发送错误代码,为以后的汽车维修和日常检查提供依据,最后对故障问题进行分类处理,并对那些不影响车辆运行的故障进行处理,以维持车辆的正常行驶。
(6)车辆状况监测
整车控制器基于车载仪表显示车辆的实时运行状态信息,使驾驶员了解车辆状态。车况监测技术基于CAN总线通信对电机转速、车速、电池剩余电量、电流等运行状态参数进行监测,并将上述数据通过车载仪表盘直观显示,提高了驾驶员与车辆之间的互动性,同时为驾驶员准确掌握车辆整体运行状况提供便利条件。
7 总结
纯电动汽车整车控制器作为整车控制系统的核心部件,对汽车的移动、制动能量优化、能量管理、CAN网络的维护和管理、故障诊断和处理、车况监测等功能的实现程度起着关键作用。本文首先介绍了纯电动汽车控制网络的构成,以及分布式控制系统的确定,然后通过整车控制器原理图概述了其系统结构,再详细介绍了整车控制器的工作原理,最后提出了整车控制器所能实现的功能,为进一步研究开发和性能评估提供理论依据。
参考文献:
[1]张翔.纯电动汽車整车控制器进展[J] 汽车电器,2011,(2):1.
[2]王贵明等.电动汽车及其性能优化[M].北京:机械工业出版社,2010:15-19.
[3]冉振亚,韩兆运.基于CAN总线的电动汽车控制系统设计[J].汽车工程,2006(03).
[4]刘永刚.基于CAN总线的电动汽车控制系统的研究[J].科学中国人,2016(12).
[5]章菊等.纯电动汽车性能综合评价方法研究[J].汽车零部件,2020(03).
[6]宋晓妍.纯电动城市客车整车控制器的设计与开发[D].长安大学.