三爪勺式马铃薯精量排种器设计与试验
2023-10-17黄玉祥张仕林郑智旗
高 原,黄玉祥,2,李 鹏,张仕林,郑智旗,2
(1.西北农林科技大学 机械与电子工程学院,陕西 杨凌 712100;2.陕西省农业装备工程研究中心,陕西 杨凌 712100)
0 引言
排种器作为播种机的关键部件,其性能直接影响播种机的工作质量。勺式马铃薯排种器是世界上应用最为广泛的马铃薯排种装置,具有结构简单、可靠性高、种薯损伤小等优点[1-4]。为提高出苗率和产量、减少病菌感染[5],以整薯作为研究对象,进行马铃薯精量排种器的研究。由于整薯形状多样、尺寸大小不一、流动性差等原因,造成勺式排种器仍然存在重播、漏播率较高的关键问题,仍需人工补种[6-9]。
为此,设计了一种三爪勺式马铃薯精量排种器,对关键部件进行理论分析和结构设计,且通过离散元仿真软件EDEM进行排种器仿真试验,优化关键参数,并利用台架试验验证仿真试验结果,为马铃薯精量排种器的设计提供参考。
1 排种器结构与工作原理
排种器主要由三爪种勺、机架、主从动轮、种箱、振动清种装置、排种链、防夹带顶杆和护种板等部件构成,如图1所示。
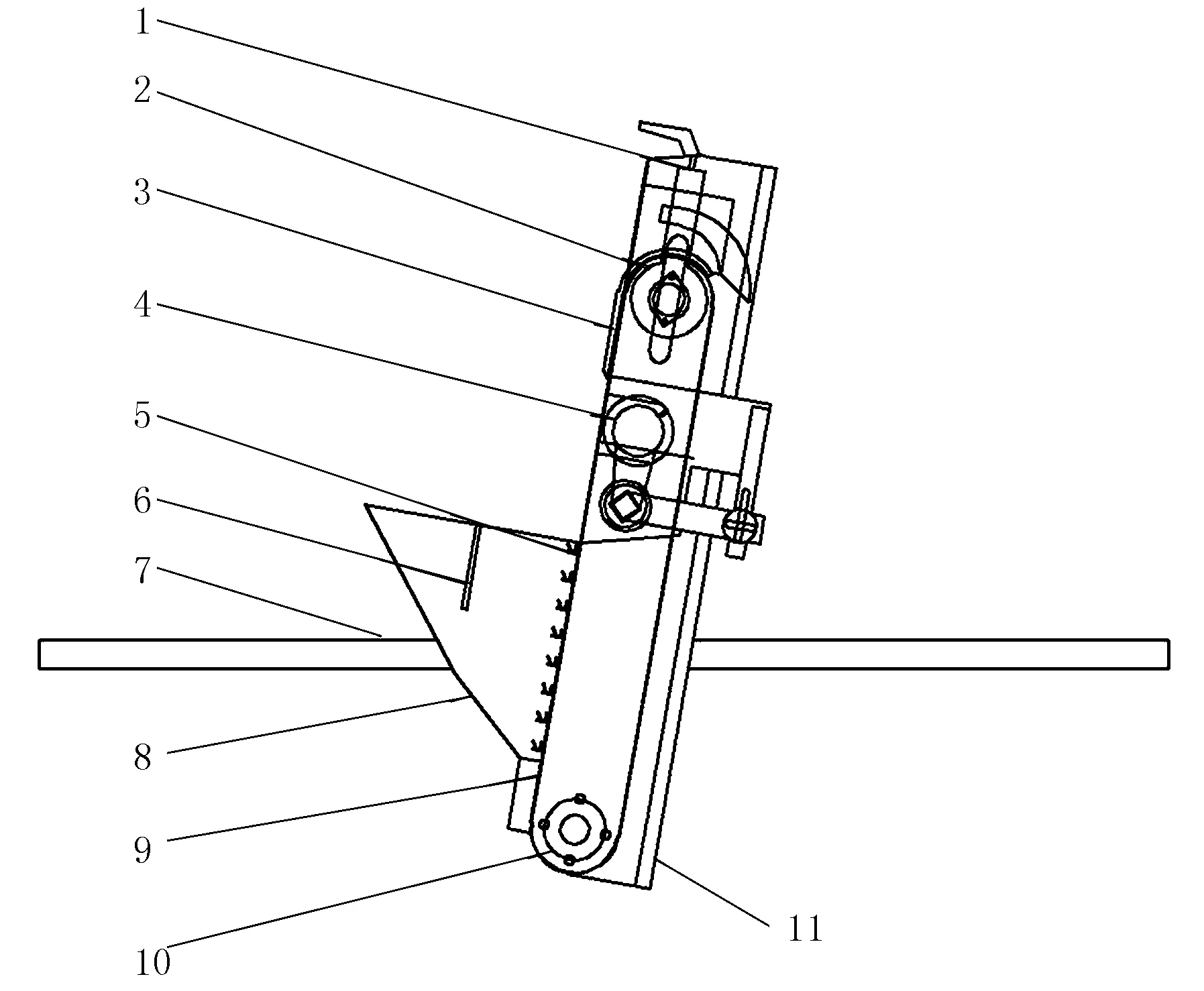
1.主动轮张紧装置 2.主动轮 3.防夹带顶杆 4.振动清种装置 5.三爪种勺 6.隔板 7.机架 8.种箱 9.排种链 10.从动轮 11.护种板图1 排种器结构示意图Fig.1 Schematic diagram of seed metering device structure
排种器播种作业过程主要包括取种、运移、清种、导种和投种5个阶段,如图2所示。排种器工作时,动力通过链传动传至主动轮,带动排种链与三爪种勺整体自下而上转动,依次舀取1~2个种薯;三爪种勺运移至清种区时,通过振动清种装置清除勺内多余种薯,通过防夹带顶杆清除勺间夹带种薯,被清除的种薯掉落回种箱;当有种薯的三爪种勺越过主动轮最高点时,种薯掉落到前一个三爪种勺的背面,与相邻三爪种勺和护种板形成封闭空间,进行平稳导种;当三爪种勺运动至投种口时,种薯失去支持力,在重力作用下完成投种[10-11]。
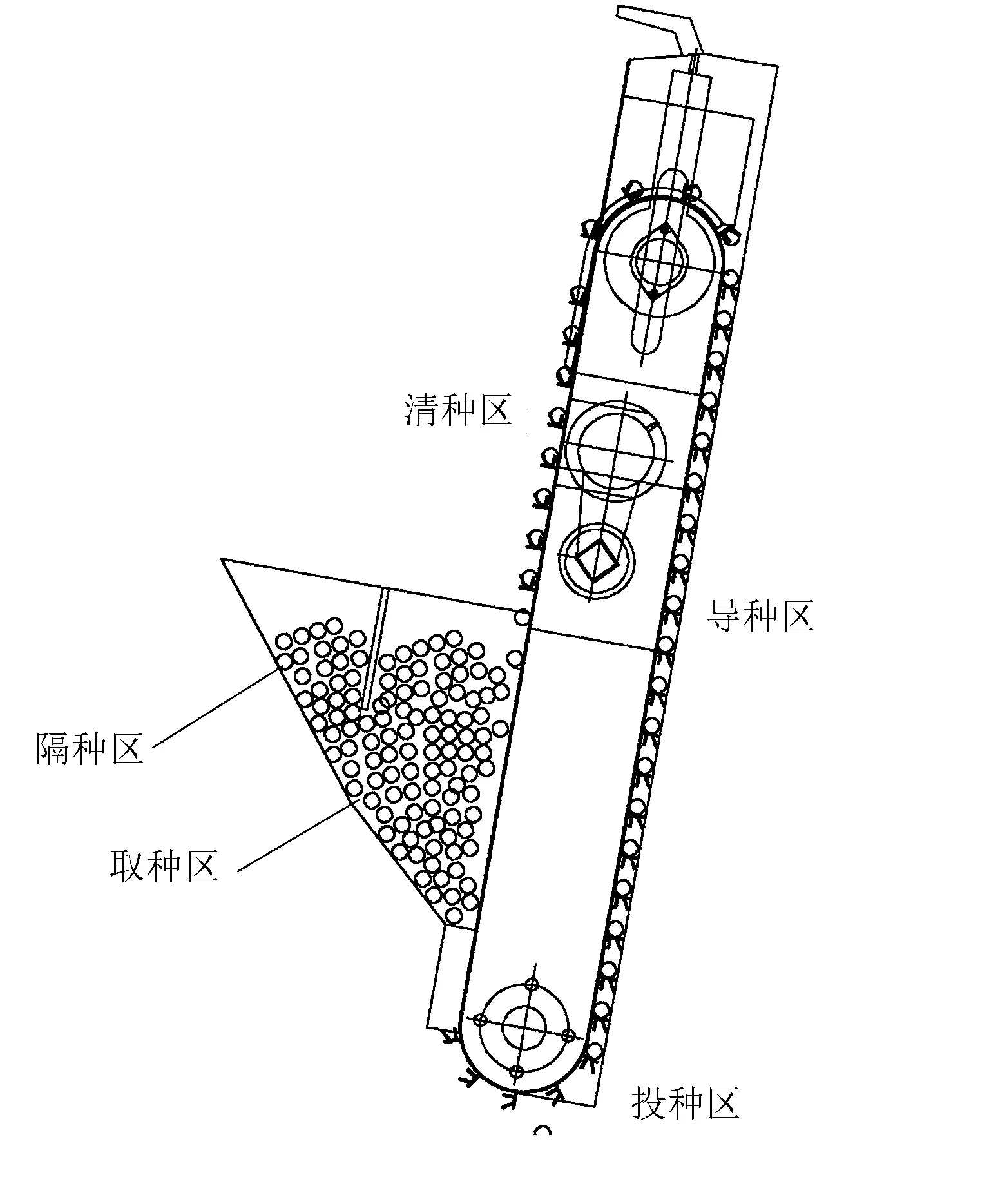
图2 排种器工作过程简图Fig.2 Diagram of the working process of seed-metering device
2 关键部件设计与分析
2.1 三爪种勺关键参数分析
三爪种勺结构如图3所示。图3中,三爪种勺的取种空间近似为圆台,则取种空间V为
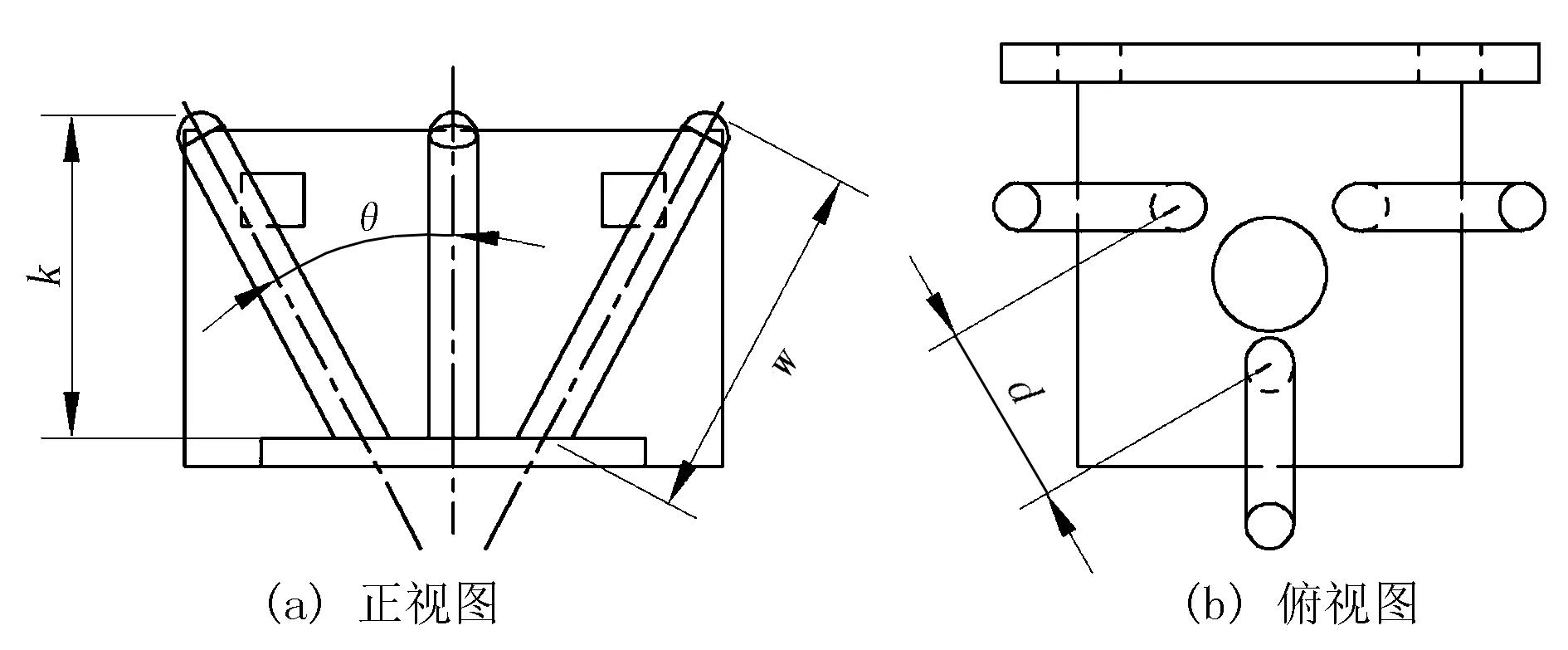
图3 三爪种勺结构Fig.3 Three-claw spoon structure


(1)
化简得
6dwsinθ+4w2sin2θ+75)
(2)
式中w—三爪长度(mm);
θ—三爪倾斜角度(°);
d—三爪底面中心距离(mm);
a—高度(mm)。
由式(2)可知:三爪长度w、三爪底面中心距离d和三爪倾斜角度θ为三爪种勺关键参数,决定取种空间的大小,从而影响排种器的作业性能。后续理论分析及试验将重点研究上述因素对作业质量的影响。
选用西北旱农区广泛种植的“新大坪”马铃薯作为设计依据[12],通过人工清选分级处理,随机抽取100个种薯,测量其外形尺寸,统计数据平均值,长、宽、厚分别为50.67、43.75、37.44mm,尺寸近似正态分布,球形率为0.89,整薯形状近似为椭圆形。
为保证在三爪种勺深度方向仅能容纳1个种薯,且空间尽量大以降低漏播率,三爪种勺深度k需满足的条件为
(3)
式中I—种薯长度(mm);
J—种薯宽度(mm);
U—种薯厚度(mm)。
计算分析得k取值范围为27.5~35mm,则三爪长度w取值范围为30~40mm。
2.2 取种原理研究
类碗形种勺的取种主要依靠种间垂直压应力σ1和重力应力σG来完成[13],如图4所示。因应力有限,当主动轮转速增加时,每个类碗形种勺取种时间变短,未取到种薯的现象会增多;类碗形种勺中的种薯在水平方向基本不受约束,容易从种勺中滑落。三爪种勺取种依靠种间垂直压应力σ1、重力应力σG和水平侧压应力σ3的复合取种应力σ来完成,应力变大,使得三爪种勺更容易取到种薯,可明显提高在高转速下的取种能力。
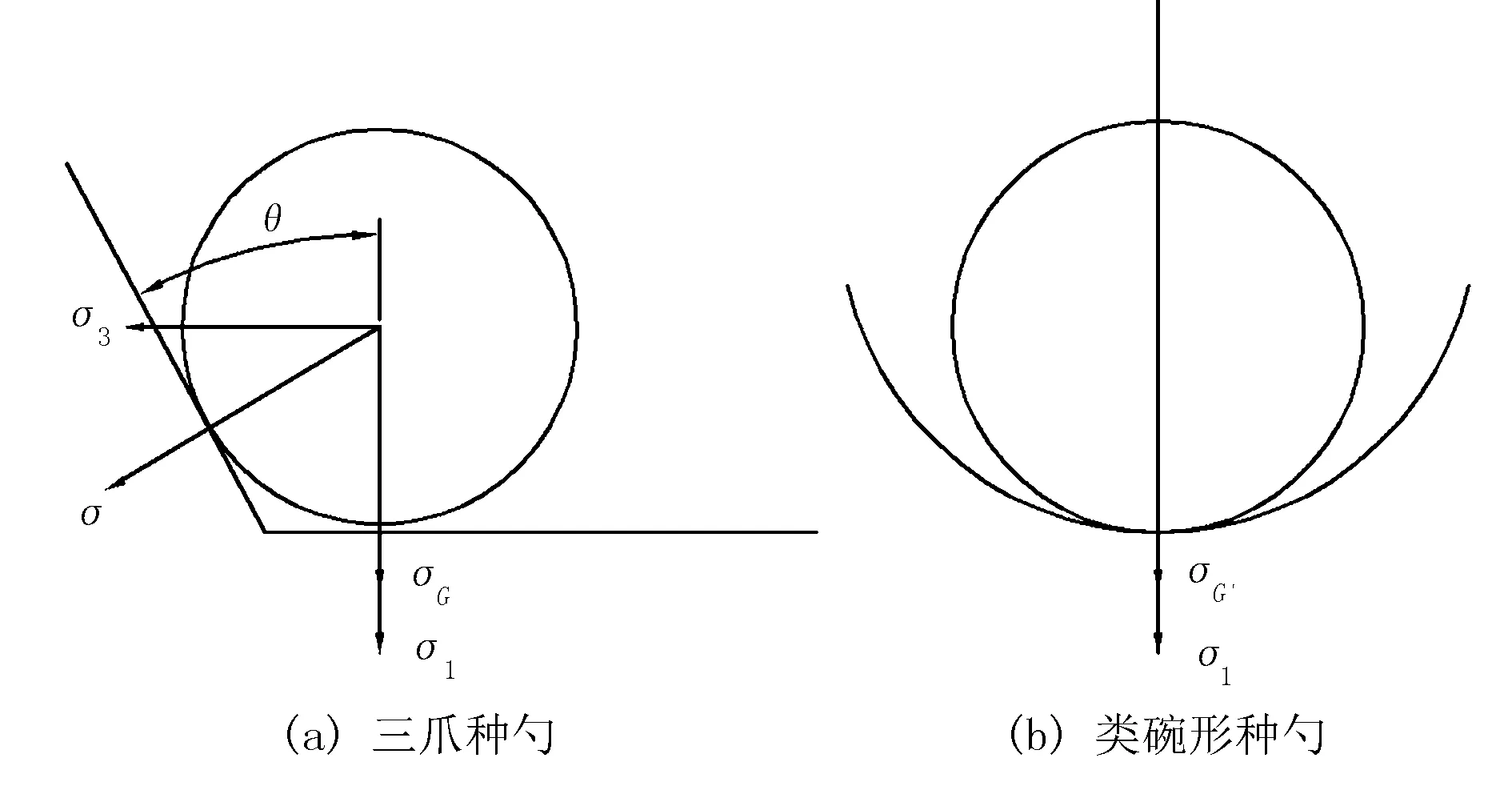
图4 两种种勺的取种应力对比Fig.4 Seed-taking stress contrast of two kinds of seed spoons
2.3 取种力学模型分析
在距离种层表面y处,取出高度为dy的微小种子层,受力情况如图5所示。
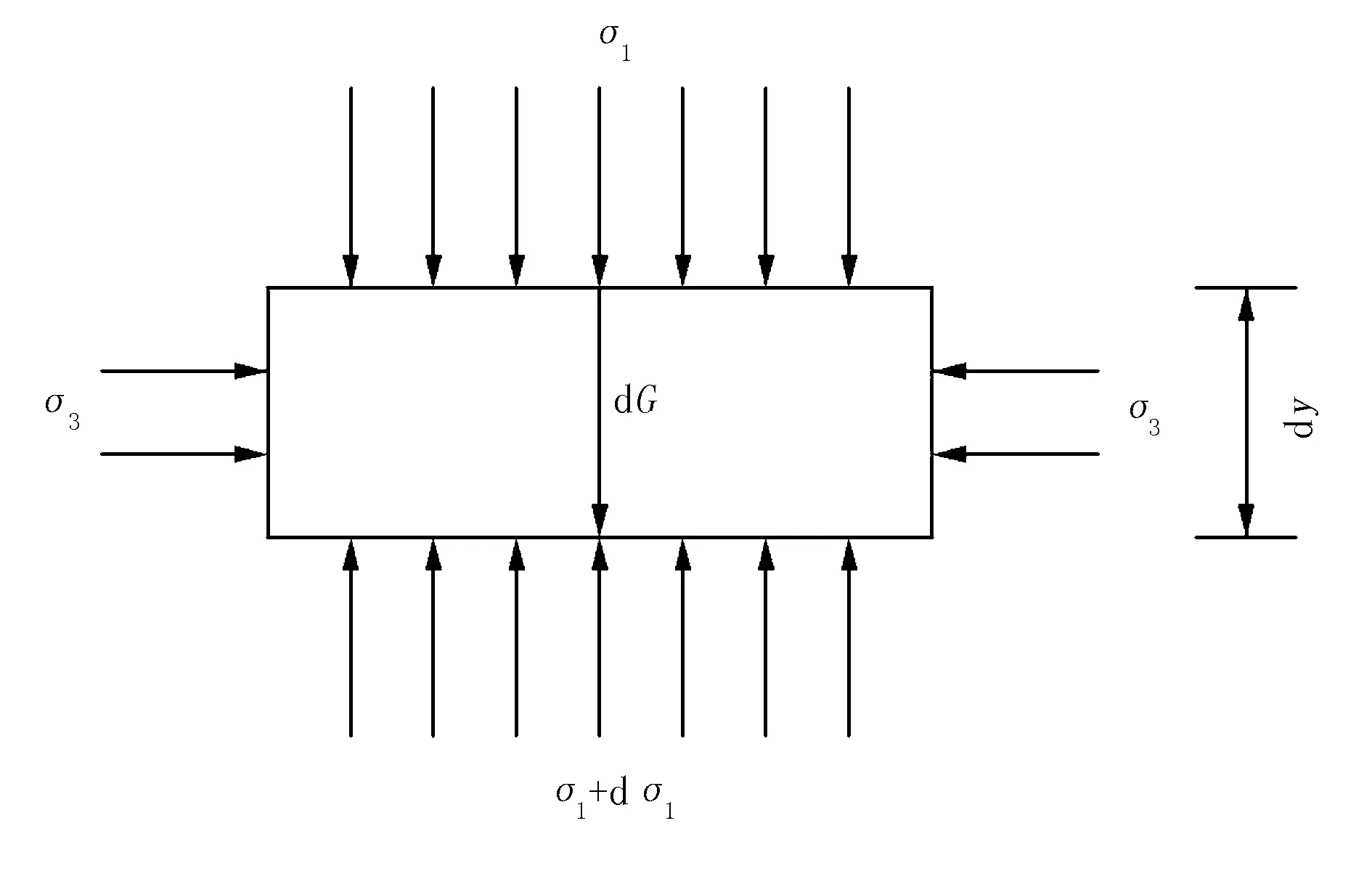
注:dy为微小种子层的长度(mm);dG为微小种子层的重力(N);dσ1为种子层增加dy的重力增加量(N)。图5 取种区单元应力分布Fig.5 Unit stress distribution in the seed-taking area
若种层横截面积为S,周长为Q,则受力的平衡方程为
σ1S+γSdy-(σ1+dσ1)S-fsKσ1Qdy=0
(4)
由此得出
(5)
当y=0、σ1=0时,积分可得
(6)
式中γ—种薯重度,取γ=10.27kN/m3(安全含水率);
Rh—液力半径,取Rh=0.009m;
fs—种薯与种箱壁间的静摩擦系数,取fs=0.445;
y—种层高度,取400mm。
(7)
式中φ—种薯内摩擦角,取φ=35°(安全含水率);
K—压力比。
计算可得K=0.270,则取种应力σ为
σ=σGsinθ+σ1sinθ+σ3cosθ
(8)
式中σG—种薯重力应力,取σG=0.266 kN/m2。
将式(6)、式(7)带入式(8),计算化简得
σ(θ)=0.769(1-e-5.34)sinθ+
0.208(1-e-5.34)cosθ+0.266sinθ
(9)
应用MatLab绘制三爪种勺取种应力σ(θ)与三爪倾斜角度θ的关系图,如图6所示。
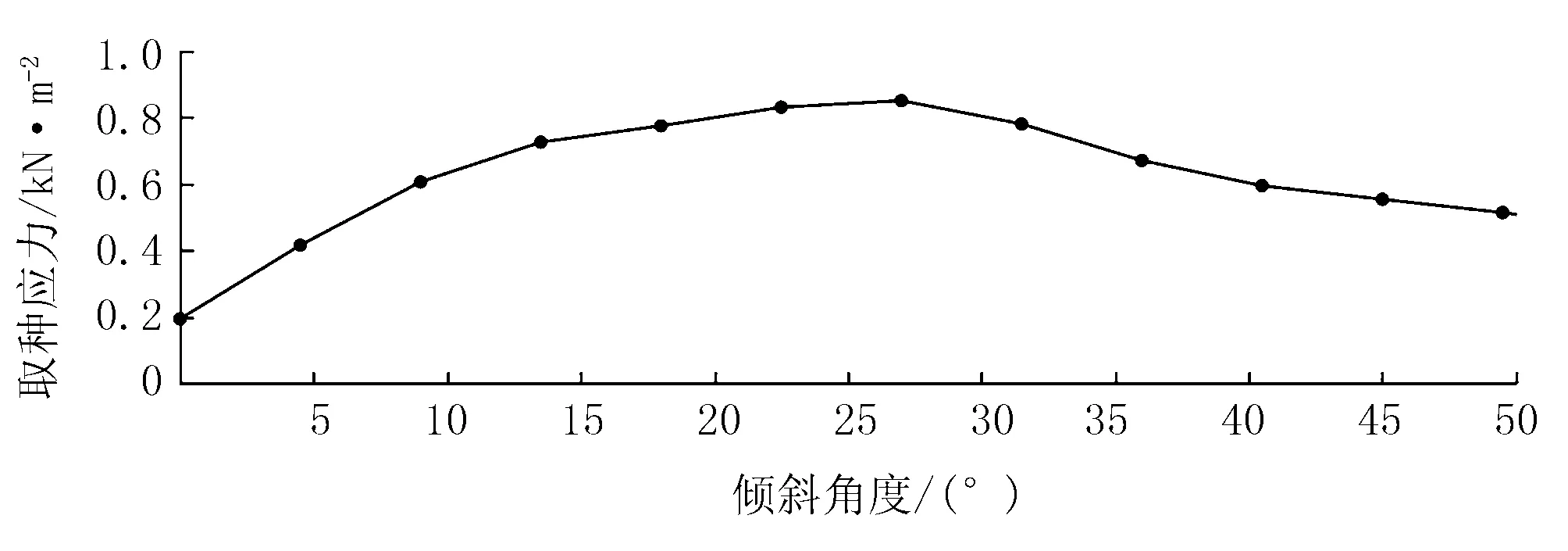
图6 取种应力函数曲线Fig.6 Seed-taking force function curve
由图6可知:三爪倾斜角度θ在20°~30°时取种应力较大,三爪种勺更易取到种薯。因此,选取三爪倾斜角度θ为20°~30°。
3 排种性能离散元仿真
3.1 设定仿真参数
3.1.1设定全局变量参数
种薯表面光滑无黏附力,选择Hertz-mindlin(no-slip)模型为仿真接触模型[14-16]。种箱、排种链材料均为钢,三爪种勺材料为工程塑料,仿真具体参数如表1所示[17]。
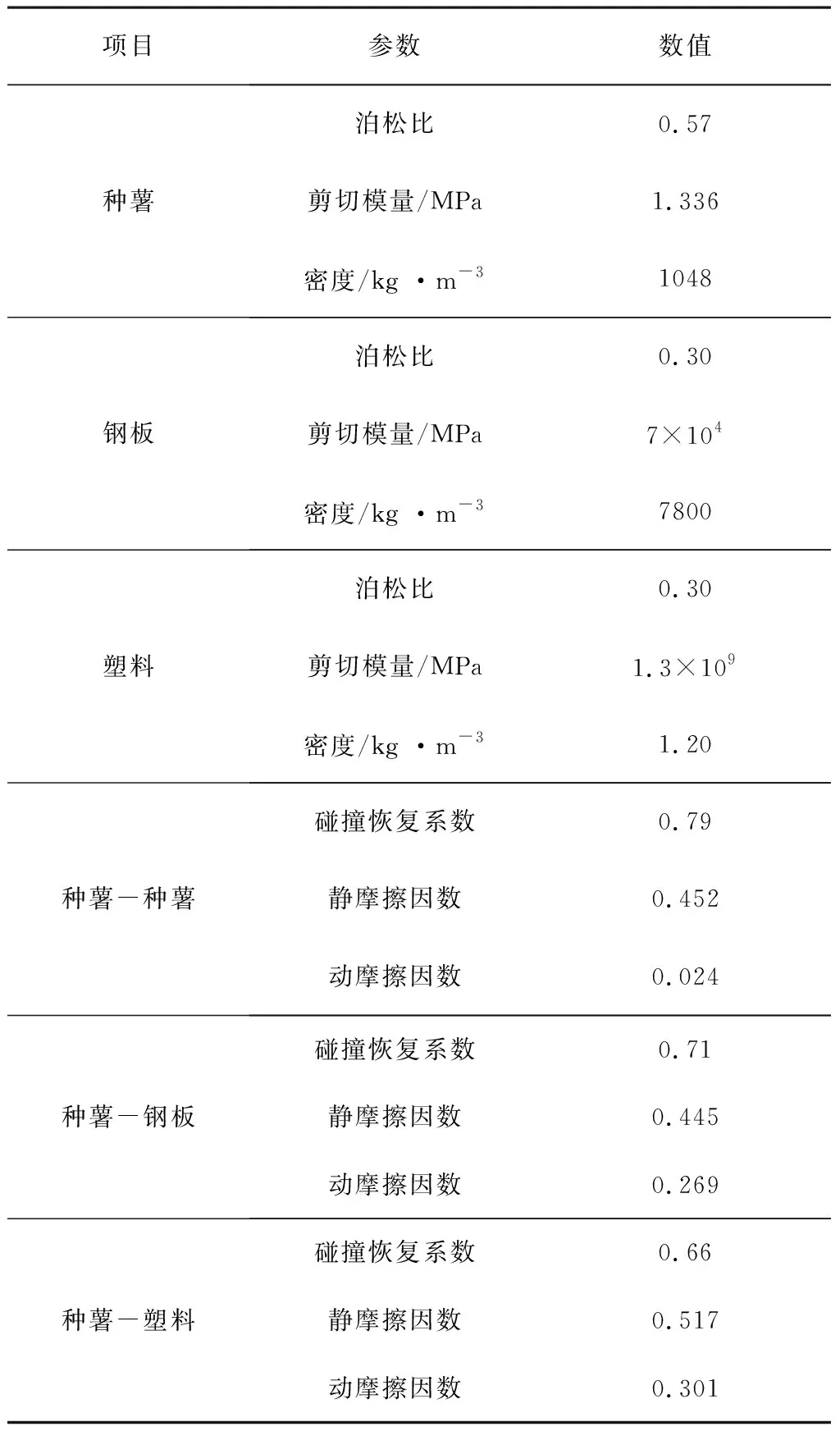
表1 全局变量参数Table 1 Global variable parameter
3.1.2建立马铃薯颗粒模型
以上述“新大坪”马铃薯整薯为试验对象,参考测量的种薯尺寸,采用16个球面构建颗粒模型,设置每个球面的半径和球心坐标,颗粒模型如图7所示。设定颗粒尺寸按正态分布,标准差为0.035。
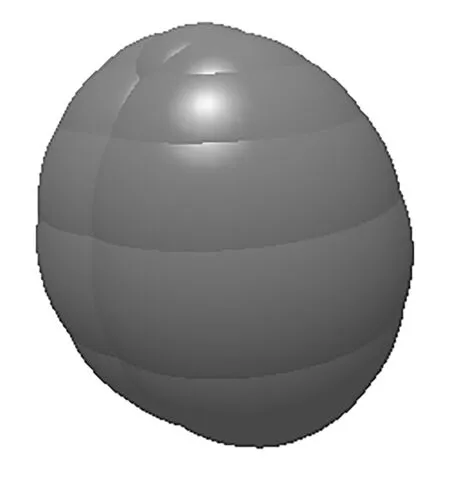
图7 种薯颗粒模型Fig.7 Seed potato particle model
3.1.3建立排种器模型
通过Creo软件绘制排种器三维模型,将简化后的种箱、排种链和三爪种勺另存为.iges格式,并导入EDEM中。按表1设定各部分变量参数,将颗粒工厂建立在种箱隔种区上方,颗粒生成总数设定为800个,生成速率为每秒8000个。
3.2 单因素仿真试验与结果分析
三爪底面中心距离影响种勺尺寸,仿真分析三爪底面中心距离分别为10、15、20、25、30mm时排种器工作情况,如图8所示。
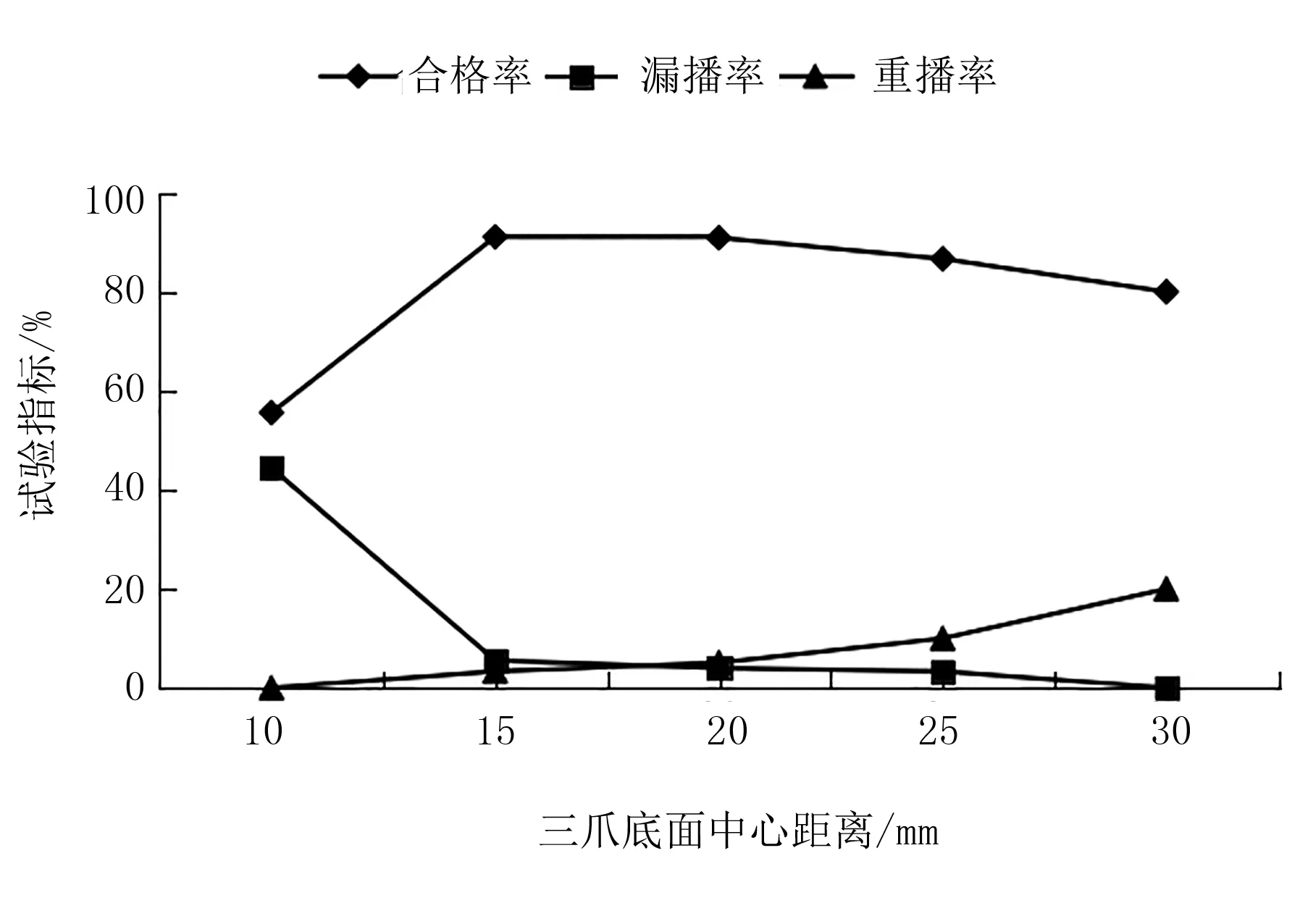
图8 不同三爪底面中心距离时评价指标变化曲线Fig.8 Variation curve of evaluation index for different three-claw bottom center distance
当三爪底面中心距离增加时,排种合格率先急剧增加后减小,漏播率先急剧减小后缓慢减小且逐渐趋于0,重播率持续增加。三爪底面中心距离增加使三爪种勺取种空间增大,过大的取种空间导致每个三爪种勺取出多个种薯,使合格率和漏播率都相应减小。由图8可知,三爪底面中心距离对排种性能影响显著。综合考虑,确定三爪底面中心距离为15~25mm,此时排种性能较好。
3.3 二次正交回归旋转仿真试验
3.3.1仿真因素及水平
根据理论分析和单因素仿真试验确定:三爪长度取值范围为30~40mm,三爪底面中心距离取值范围为15~25mm,三爪倾斜角度取值范围为20°~30°,主动轮转速选取27~87r/min。根据Box-Behnken响应面设计理论,以合格率Y1、漏播率Y2、重播率Y3为响应值,进行四因素三水平响应面试验研究。试验因素与水平如表2所示。
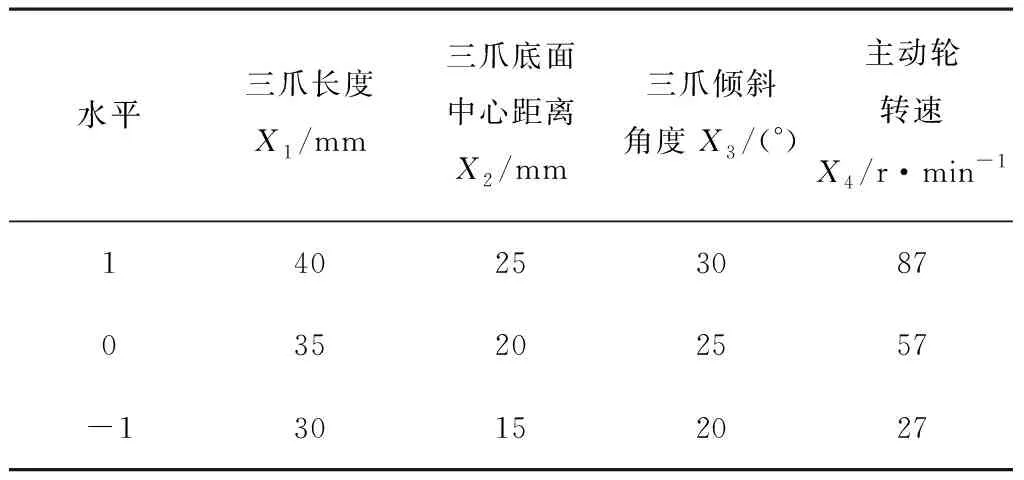
表2 试验因素与水平Table 2 Experiment factors and level
3.3.2试验方案与结果
四因素三水平Box-Behnken试验方案有29个试验点[18],试验方案与结果如表3所示。试验因素对模型的影响程度与贡献率Z值的大小成正比,计算公式为[19]
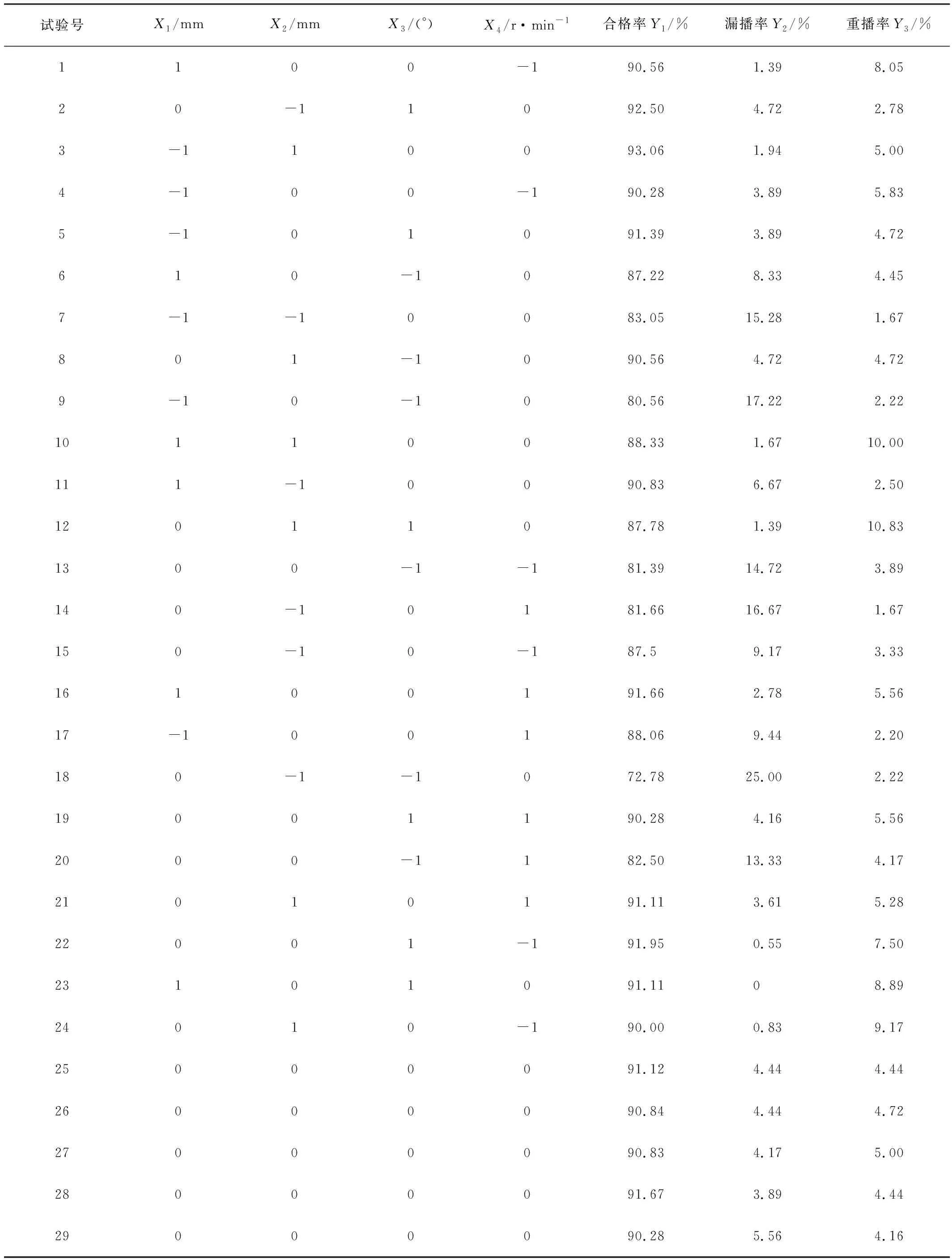
表3 试验方案与结果Table 3 Experiment project and results
(10)
(11)
式中F—模型中的各F值;
η—F值的考核值;
Zxj—各因素贡献率。
由式(10)和式(11)计算得:三爪长度、三爪底面中心距离、三爪倾斜角度、主动轮转速对合格率的贡献率分别为2.24、3.41、3.22、2.73,对漏播率的贡献率分别为2.18、3.28、3.24、2.66,对重播率的贡献率分别为2.18、2.30、2.77、2.44,即各因素对合格率的影响大小依次为三爪底面中心距离、三爪倾斜角度、主动轮转速、三爪长度;对漏播率的影响大小依次为三爪底面中心距离、三爪倾斜角度、主动轮转速、三爪长度;对重播率的影响大小依次为三爪倾斜角度、主动轮转速、三爪底面中心距离、三爪长度。
3.3.3试验结果目标优化
为确定各因素在范围内的最优参数组合,以合格率最高、漏播率和重播率最低为目标,结合各因素边界条件进行优化求解,建立数学模型为
(12)
优化求解得三爪长度38.04mm、三爪底面中心距离16mm、三爪倾斜角度29.07°、主动轮转速53.05r/min,此时合格率、漏播率和重播率分别为94.49%、2.19%和3.32%。在此条件下重复5次仿真试验,得排种器合格率、漏播率和重播率分别为95%、1.94%和3.06%,误差分别为0.54%、11.41%和7.83%,误差较小,表明该回归方程可靠性较高。
4 台架验证试验
为了验证仿真试验的可靠性,分析马铃薯排种器性能的可行性,进行排种器台架试验,试验装置如图9所示。
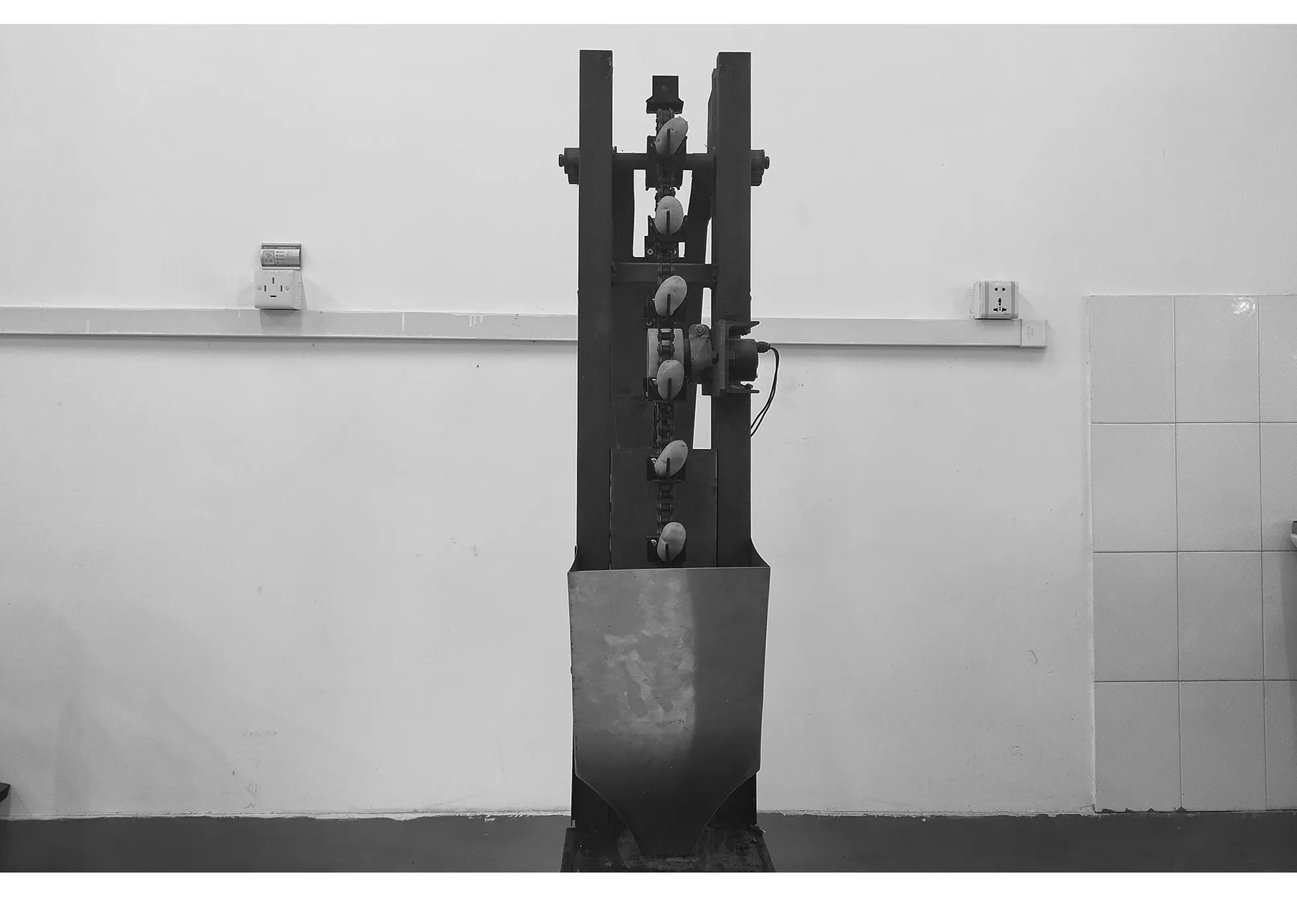
图9 试验装置Fig.9 Test device
在三爪长度38.04mm、三爪底面中心距离16mm、三爪倾斜角度29.07°、排种器主动轮转速53.05r/min的条件下进行5次重复试验,取平均值,得排种合格率为93.33%、漏播率为4.17%、重播率为2.5%,与仿真优化结果相近,表明仿真优化结果的可靠性较高。由于试验时产生振动,导致重播率低于仿真试验结果、漏播率高于仿真试验结果,表明三爪勺式马铃薯精量排种器各项排种性能指标优于马铃薯种植机质量评价技术规范的相关要求。
5 结论
1)为降低马铃薯排种器的重播率和漏播率,设计了三爪勺式马铃薯精量排种器,完成了结构设计和理论分析,并结合单因素仿真试验确定了影响排种性能的主要因素和参数范围。
2)以三爪长度、三爪底面中心距离、三爪倾斜角度和主动轮转速为试验因素,进行四因素三水平二次正交回归旋转组合仿真试验,建立回归方程并分析各因素对试验指标的影响关系,确定最优参数组合为三爪长度38.04mm、三爪底面中心距离16mm、三爪倾斜角度29.07°、主动轮转速53.05r/min,此时合格率、漏播率和重播率分别为94.49%、2.19%和3.32%。
3)对最优参数组合进行排种性能试验验证,结果表明:排种合格率为93.33%,漏播率为4.17%,重播率为2.5%,试验结果与仿真优化结果相近,在高速条件下优于马铃薯种植机质量评价技术规范的相关要求。
