马铃薯播种机漏播监测与补种系统设计研究
2023-10-17张先锋钟魏然崔晋波
李 平,冯 伟,张先锋,钟魏然,王 攀,崔晋波
(1.重庆市农业科学院,重庆 401329;2.四川省农业机械研究设计院,成都 610066)
0 引言
马铃薯是我国第4大粮食作物,每年种植面积600万hm2以上,位居全球第一[1]。随着机械化程度的推进,马铃薯已经基本实现了耕整地、播种、中耕管理、收获环节的机械化作业。按照现有农艺要求,马铃薯种薯都采用切块种植,在切块过程中导致种薯的大小不一,造成了现有马铃薯播种机出现漏播、重播、株距变异等问题,严重影响了马铃薯的产量,制约了马铃薯产业的快速发展。
针对马铃薯播种机漏播的问题,国内外学者都进行了相关研究,主要体现在漏播监测和补薯机构两个方面。刘树峰等人设计了一种采用激光传感器的马铃薯漏播监测装置,并在种箱旁边设计了1个由电机驱动的外槽轮式的补薯装置,但对马铃薯的外形尺寸要求较高,存在种薯夹伤、重播和株距变异的问题。甘肃农业大学巩自卫等人采用激光传感器进行漏播监测和漏播补偿控制系统的设计,其对环境的清洁度要求较高,在实际应用过程中会因为尘土太严重导致监测系统失效。甘肃农业大学王关平等人基于单向离合器、通过干簧继电器触发红外漏播监测系统的补薯装置,结构较为简单,单向离合器很好地解决了两种动力随意切换的问题;但在执行补薯作业时电机高速运转,在进行马铃薯补薯的同时也缩短了在种箱对取种勺的充种时间,会造成取种勺空勺的情况。孙伟等人设计了一种加强型漏播检测及以击打强排为手段的速动补种系统,基本解决了补薯过程中株距变异的问题;但专用的补种箱依然存在,在击打部位容易出现堵塞和种薯损伤的问题。
综上所述,马铃薯漏播监测系统的研究已经较为成熟,且监测准确率也很高,只需在可靠性和实用性进行相关改进即可;而补薯机构虽然采用了不同的结构和驱动形式,但是均存在伤薯率高、株距变异大、堵塞等多种问题,一直处于研发阶段,并没有推广。为此,针对以上的问题,设计了一种基于双红外线的传感器漏播监测系统而播种机构采用了单行双链的勺链式取种机构,一行用于正常播种,另一行用于马铃薯漏播补薯,通过补薯电机的驱动可以实现马铃薯播种作业的精确补薯,解决了马铃薯补薯堵塞、株距变异大及伤薯率高的问题。
1 整机结构与工作原理
1.1 整机结构
马铃薯智能补薯装置由两部分构成(见图1):一是种薯漏播监测系统,由永磁体磁钢、霍尔传感器、红外线发生器、红外线接收器、DA模块、运算控制器等主要部件组成;二是种薯补薯装置,由勺链式取种勺、步进电机、传动机构等主要部件组成。
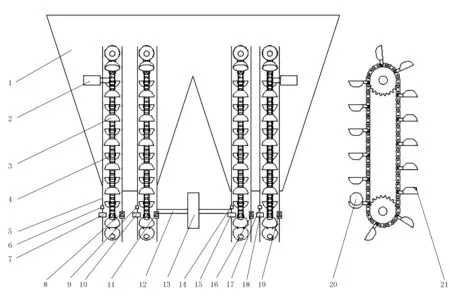
1.种箱 2.补薯驱动电机 3.取种勺 4.驱动链条 5.护种槽 6、9、14、17霍尔传感器 7、10、15、18 红外发射管 8、11、16、19红外接收管 12.地轮驱动轴 13.地轮 20.切块种薯 21.小磁钢图1 马铃薯漏播监测与补薯播种机整机示意图Fig.1 Schematic diagram of potato missing sowing monitoring and potato supplement planter
1.2 工作原理
马铃薯种薯漏播监测装置采用了基于红外线的光电传感器,在每个取种勺安装有1个磁钢,在红外线传感器旁边安装有1个霍尔传感器;当带磁钢的取种勺经过霍尔传感器时,触发红外光电传感器工作进而启动漏播监测系统;当红外线接收器未收到有光时,系统判定取种勺有种薯,不启动补薯机构;当红外线接收器接收到光时,系统判定取种勺未有种薯,立即将补薯信号发送到执行端,驱动补薯机构精确补薯。
马铃薯补薯装置由勺链式补薯机构、驱动电机、张紧装置及种箱等组成,主播链由地轮动力驱动,补薯链采用电机驱动,并在补薯机构的下薯端(即离地最近的取种勺背面)也设置有漏播监测。其工作原理与漏播监测一样,当补薯链的下薯端检测到有漏播时,驱动电机按照设定的速度进行补薯,保证在每一个下薯端的取种勺背面始终都有1个种薯。这样设计的优点如下:一是可以实现在播种机刚开始下地工作时补薯机构会自动工作,直到补薯下薯端始终有种薯才停止准备;二是在播完时可以通过机构运转把机具里面的所有马铃薯清除干净,减少人工劳动量;三是播种机的补薯下薯口和主播种下薯口共用,保证了在补薯工作时可以实现既定农艺要求的株距和行距。
2 关键部件设计
2.1 漏播监测系统设计
2.1.1触发模块设计
触发模块相当于是漏播监测系统的开关,主要起通断电路的作用,其安装示意图如图2所示。
播种作业过程中,由于机具的振动和环境灰尘都较大,需要选择抗振性能好和灵敏度高的霍尔传感器。在此,选用TB-5002C型霍尔传感器,它为新型开关式传感器,输入电压为12~24V,工作电流2~20mA,具有结构简单、体积小、响应时间短、防水防尘和寿命长等优点;选择规格为20mm×20mm×10mm的Y30铁氧体磁钢,当安装在取种勺的磁钢离霍尔传感器10mm时霍尔传感器输出导通。霍尔传感器的控制电路如图3所示。
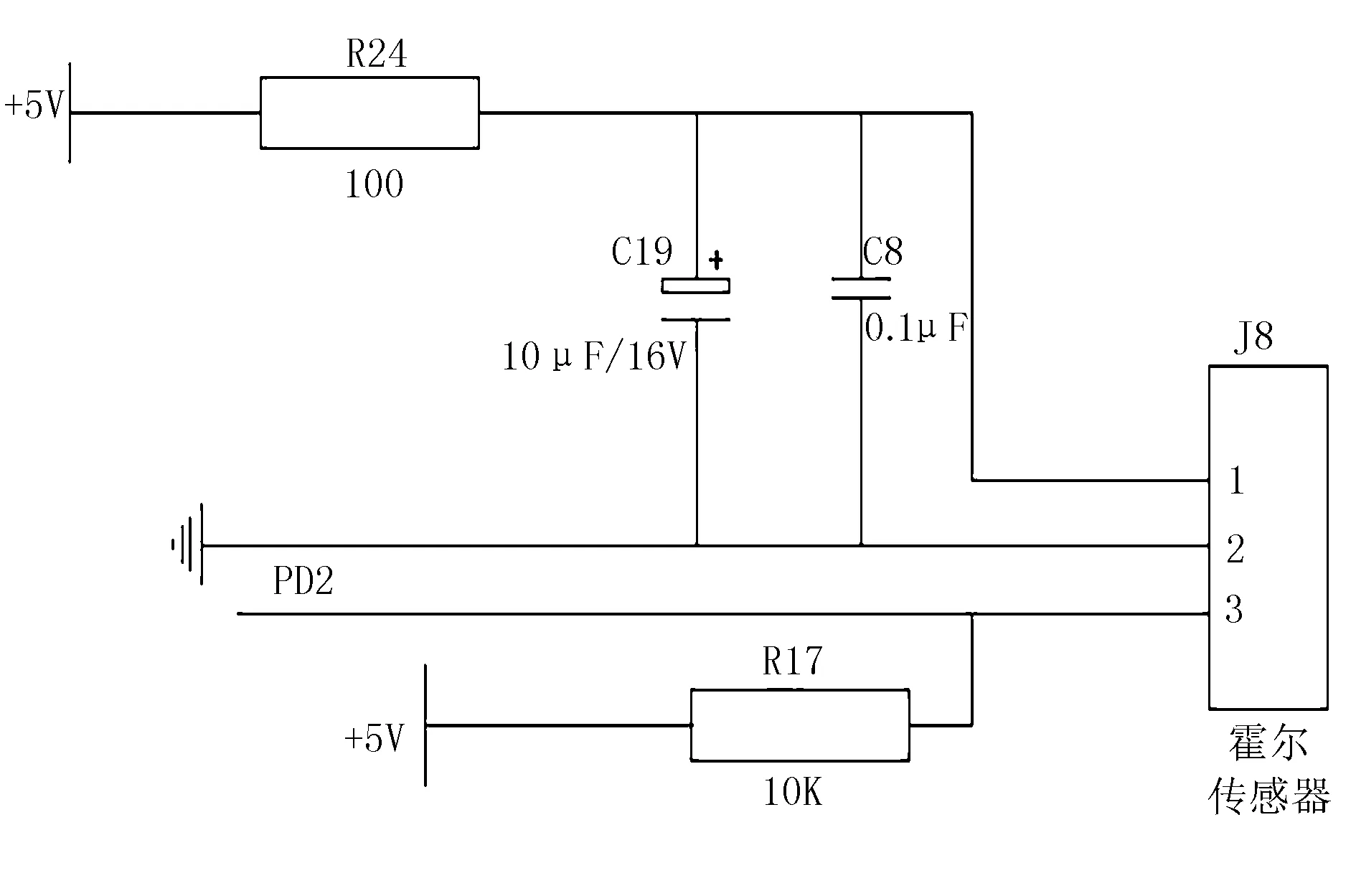
图3 霍尔传感器控制电路Fig.3 Hall sensor control circuit
2.1.2 漏播监测模块设计
漏播监测的信号采集模块主要集中在红外线发生器和红外线接收器上,安装位置分别为主播种链和补薯链下种处。由于马铃薯在切块后都会伴有粉末性消毒药品,另外在播种过程中存在较大的灰尘,因此红外线传感器要选择对尘土穿透性好的红外线发生器和灵敏度高的红外线接收器。红外光敏二极管的光谱特性与红外发光管发射的近红外线的光谱重合,能获得很高的光电转换效率,且响应迅速,不容易受到杂散日光的影响;近红外线波长在 0.75~2.0μm之间,因而对灰尘、灰幕的穿透力较强,可以保证检测的可靠性[3];此外,近红外管价格便宜、容易购买。因此,红外二极管和红外光敏二极管组合较适合马铃薯漏播检测。其中,红外光敏二极管和红外发光二极管组合的光电传感器可对取种勺内种薯的有无进行监测。控制电路如图4所示。
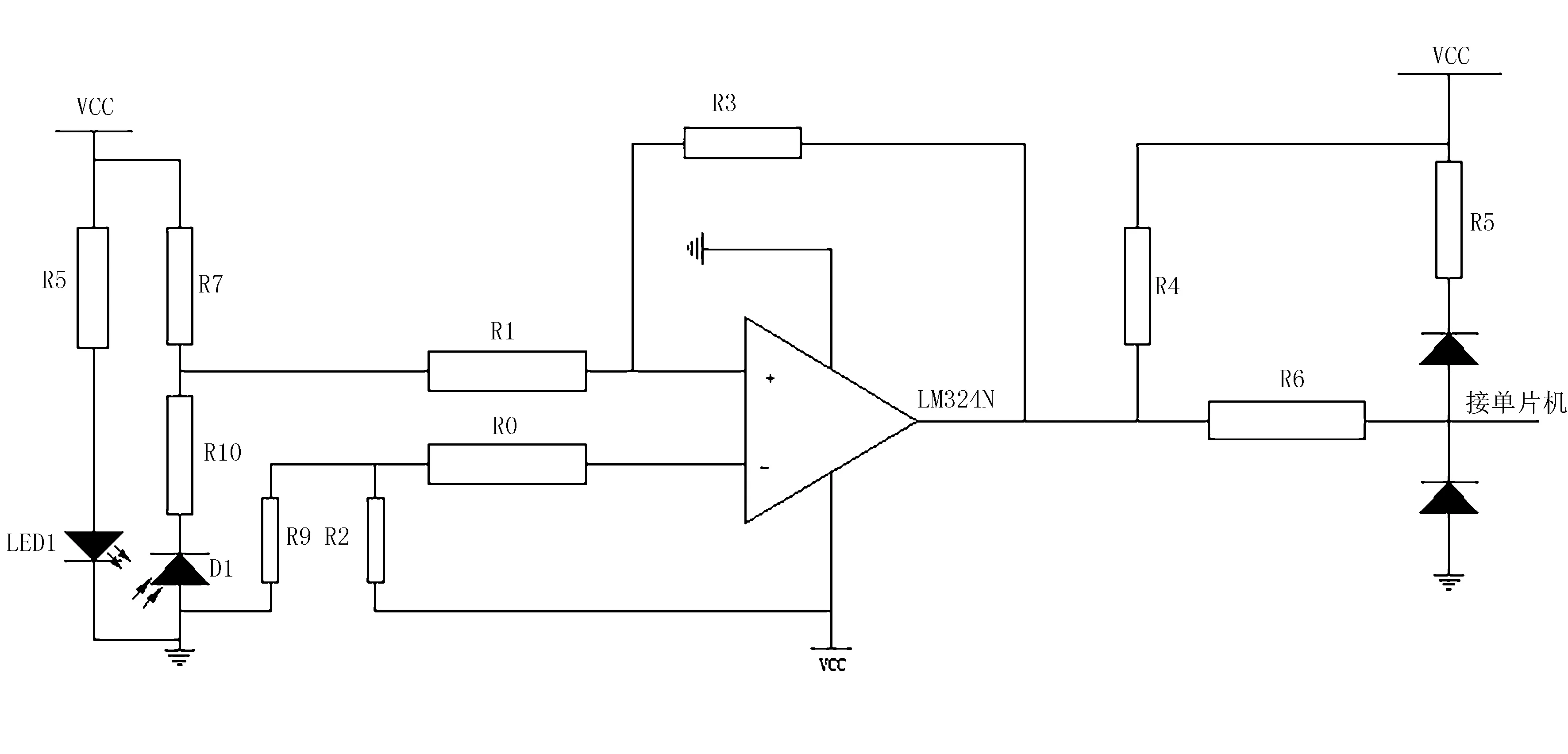
图4 光电传感器控制电路Fig 4 Photoelectric sensor control circuit
马铃薯播种作业时,面对种薯的直径相差较大和取种勺遮挡等实际存在的问题,选择了3个红外光敏二极管,每个红外光敏二级管的安装距离为1.5cm,目的是降低在监测过程中系统的误判率。当且仅当3个红外光敏二极管都接收到红外光线时,系统才会判定取种勺缺种,系统处理器通过不间断地读取红外光敏二极管的引脚状态来识别。红外线发射和接收装置安装示意图如图5所示。
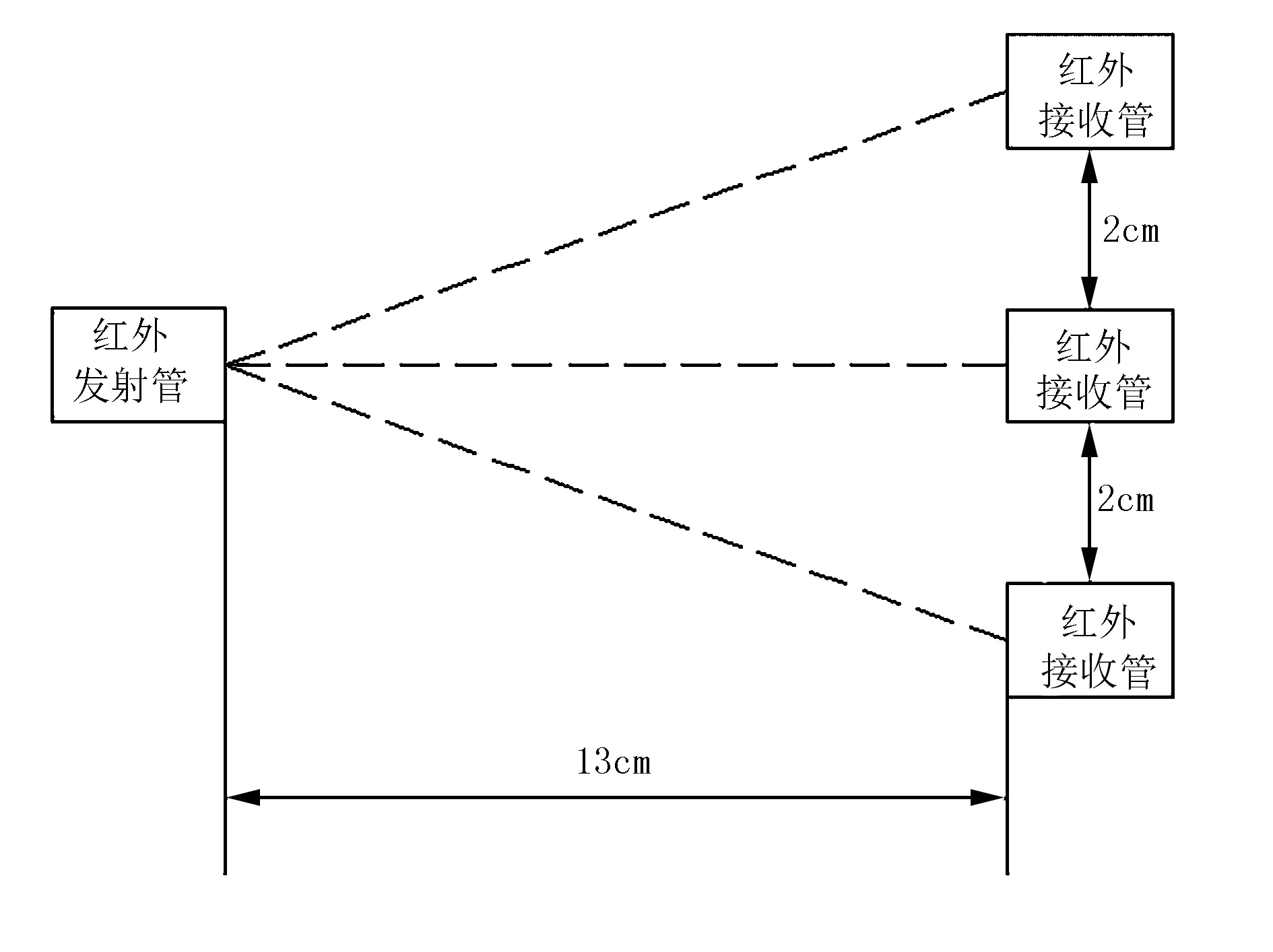
图5 红外发射和接收装置安装示意图Fig.5 Installation diagram of infrared transmitting and receiving device
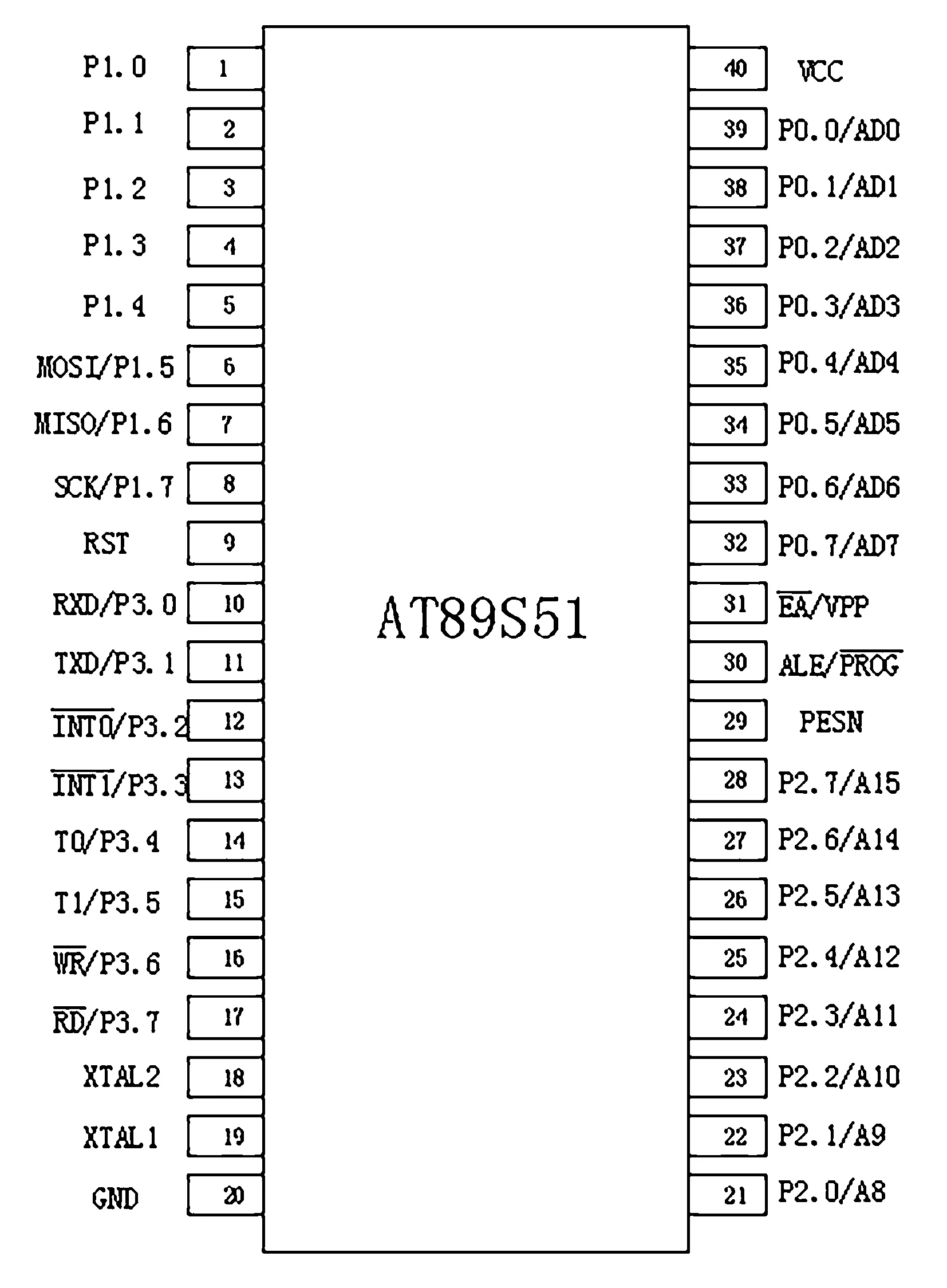
图6 AT89S51双列直插封装方式的引脚Fig.6 Pins of AT89S51 dual in-line package
2.1.3运算模块设计
本文的运算控制模块需要同时进行主播种链和补薯链等各种机构的信息读取,并通过运算驱动补薯电机的精准运行。在西南丘陵山区大垄双行的农艺种植模式下,采用以AT89S51单片机为核心的运算模块,其相比AT89C51增加了掉电标志。AT89S51单片机是一种高性能CMOS8位单片机,标准兼容MCS-51指令系统及80C51引脚结构,芯片内集成了通用8位中央处理器和ISP Flash存储单元,拥有4K Bytes Flash片内程序存储器、2个16位可编程定时计数器;计时器和计数器功能较为强大,其补薯动作的命令很容易通过编程来控制,有效地解决了运算速度与总系统之间的矛盾问题,且该单片机非常成熟,可靠性高且稳定性好,满足在田间播种恶劣的工况需求。双列直插封装方式的引脚如图5所示。
2.2 补薯机构设计
补薯机构的作用是在系统发出补薯信号后,驱动电机在规定的时间完成精准补薯动作,本文的补薯机构采用和主播种链一样的结构。由于勺链式取种机构链条足够长,其补薯动作属于间断性工作且有足够的充种时间,大大提高了补薯机构的作业效率,降低了补薯机构的漏播监测系统运算量。补薯机构的漏播监测装置安装在补薯机构离地最低的取种勺背面,当监测机构发现补薯链取种勺背面没有种薯时,随即驱动补薯电机,将下一个取种勺代替现有的取种勺,始终保持取种勺的背面有种薯待命。在驱动机构中,步进电机的转速和转角在补薯机构上具有十分重要的作用,关系到取种勺的充种时间和种薯的精准到达播种点。本文取重庆地区现有马铃薯种植密度的平均值4000株/667m2,播种垄面宽度为0.7m,垄沟的宽度为1m,株距约为0.25m,中小型马铃薯播种机的播种速度为2~5km/h;勺链采用12A链条,链条的节距为12.9mm,每6节布置一个种勺;链轮选用齿数为22齿。通过简单的计算得知,勺链式排种器的工作线速度为0.43~0.86m/s。
考虑到步进电机的驱动电源为拖拉机电瓶供电,故步进电机工作电压范围选择在0~36V。在12V电压工况下,其振动和噪音都较其他工况更为理想,工作状态较为稳定。在工作中所驱动的勺链在满载情况下,设切块马铃薯种薯的平均质量为50g,驱动链条的长度为1.45m,链轮的参数为12A,齿数为22齿,每6个链节安装一个马铃薯取种勺。马铃薯补薯装置工作侧面示意图如图7所示。
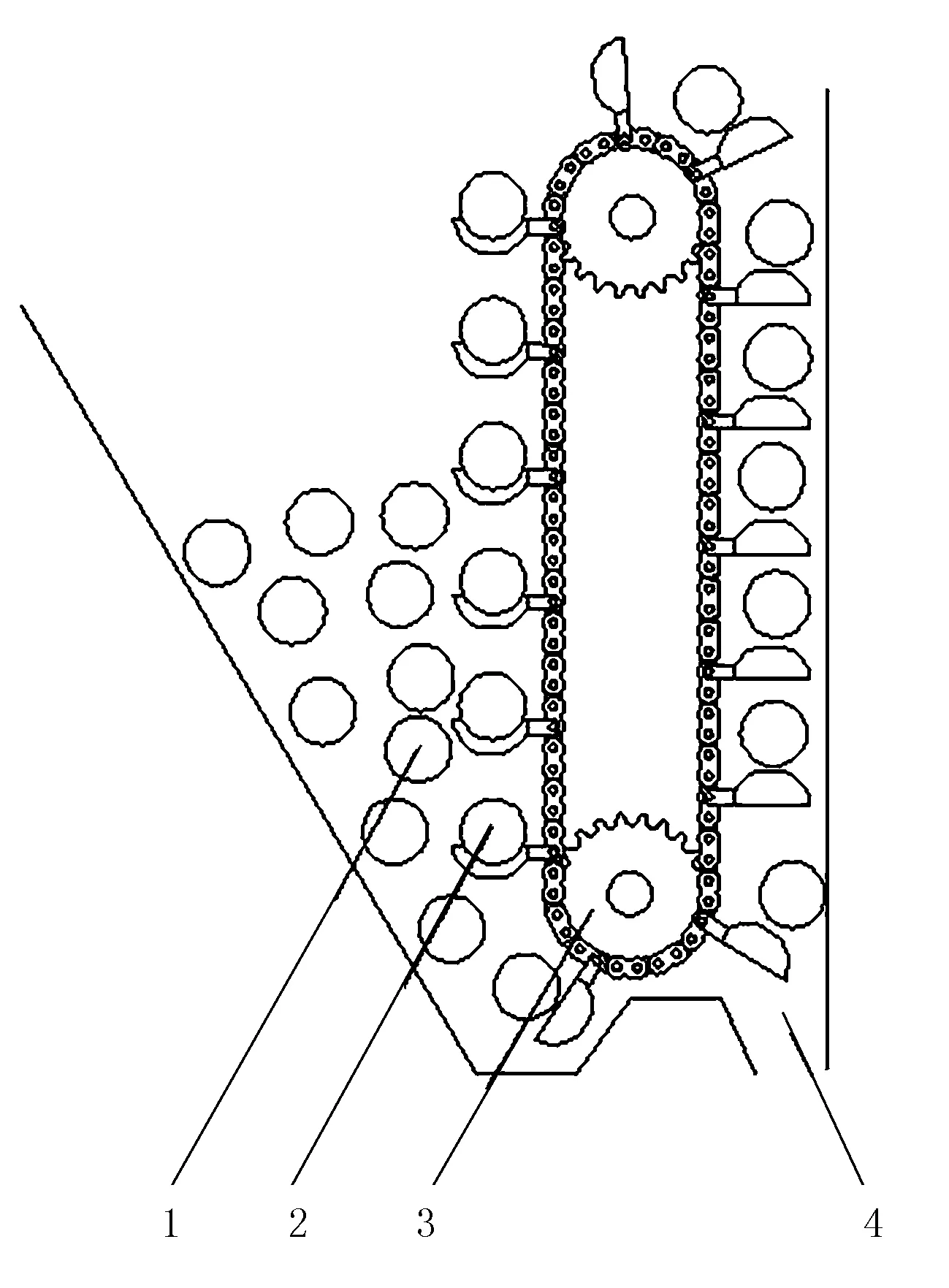
1.切块种薯 2.取种勺 3.驱动链轮 4.下薯口图7 马铃薯播种机补薯装置侧面示意图Fig.7 Side diagram of potato supplement device of potato planter
由图7可知:马铃薯补薯机构的左右两端取种勺在一般情况下种薯是均匀分布的,按照马铃薯种薯切块要求,其种薯的质量相差不超过20%。因此,驱动链轮左右两端取种勺累加起来所受的马铃薯重力均是竖直向下,理论上它们产生扭矩相互抵消。该链轮的驱动扭矩为取种勺中种薯累计质量差加上取种勺在种薯箱运动所受的摩擦力与链轮半径的积。按照本文设计的马铃薯种箱高度为1.3m,在种薯满载的情况下,经过现场测试取种勺在种薯箱中运动的平均摩擦力为74.6N,链轮的节圆直径为127.82mm,考虑到种薯的左右链条两边种薯质量差,取放大系数为2,通过计算可得
式中F—取种勺运动的摩擦力(N);
d—链轮的节圆直径(m);
μ—放大系数。
计算可得,取种勺驱动电机的扭矩T=9.54N·m。带入功率计算公式,可得
式中T—驱动电机的扭矩(N·m);
n—电机的转速(r/min)。
带入公式,计算出电机的功率为79W。考虑到电机在极限工况下由于薯箱种薯的排列和极限工况电机的过载因素,最终确定选择电机的功率为200W,工作电压为12V,以尽量保持拖拉机发电系统的电量补充与消耗的平衡。
在补薯执行机构的运动过程中,为了保证补薯机构下种位置与主播种机构的下薯位置一致,采用了主播种下薯口和补薯机构下薯口共用的方法,且在外形尺寸上保持一致,尤其是与下薯驱动链的高度保持一致,以保证执行补薯作业时补薯下薯的位置与主播种链的下种位置保持一致,确保株距不改变。马铃薯播种机下薯口的结构示意图如图8所示。
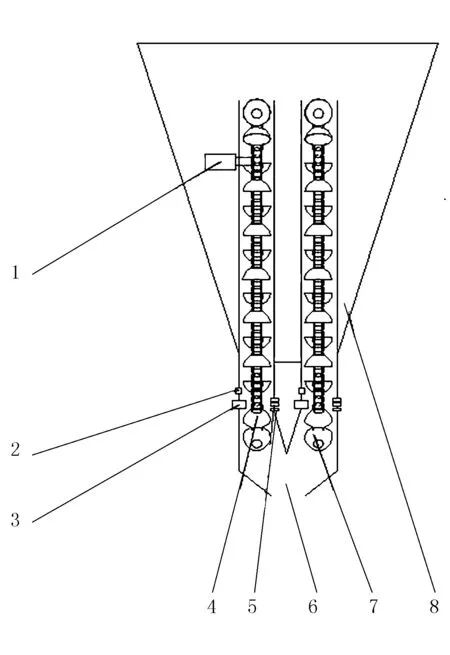
1.补薯驱动电机 2.霍尔传感器 3.红外发射管 4.补薯驱动链条 5.红外接收管 6.下薯口 7.主播种驱动链条 8.种箱图8 马铃薯播种机下薯口的结构示意图Fig.8 Structural diagram of lower potato mouth of potato planter
2.3 软件系统流程设计
根据功能要求,马铃薯漏播监测系统的工作流程如下:第1个过程为通电后完成系统的初始化,然后对各个系统进行自检,如果系统自检出现故障,将会点亮对应系统的故障灯,并以声光报警提示用户,自检完成无问题后进入待机状态;第2个过程为系统对补薯链上的取种勺种薯有无进行判别,若系统判定为无种薯,则通过步进电机驱动补薯链带动取种勺运动,直到补薯监测系统监测到取种勺上有种薯为止,完成上述过程后系统进入待命状态;当系统接到启动监测命令后,监测系统对主播种链和补种链上的取种勺有无种薯进行判别,当检测到主播种链取种勺上无种薯时,在取种空勺到达播种位置后步进电机驱动补薯机构精准地将种薯补在应播种位置,并将补薯的次数进行累计。软件系统的开机流程图和系统工作流程图如图9、图10所示。
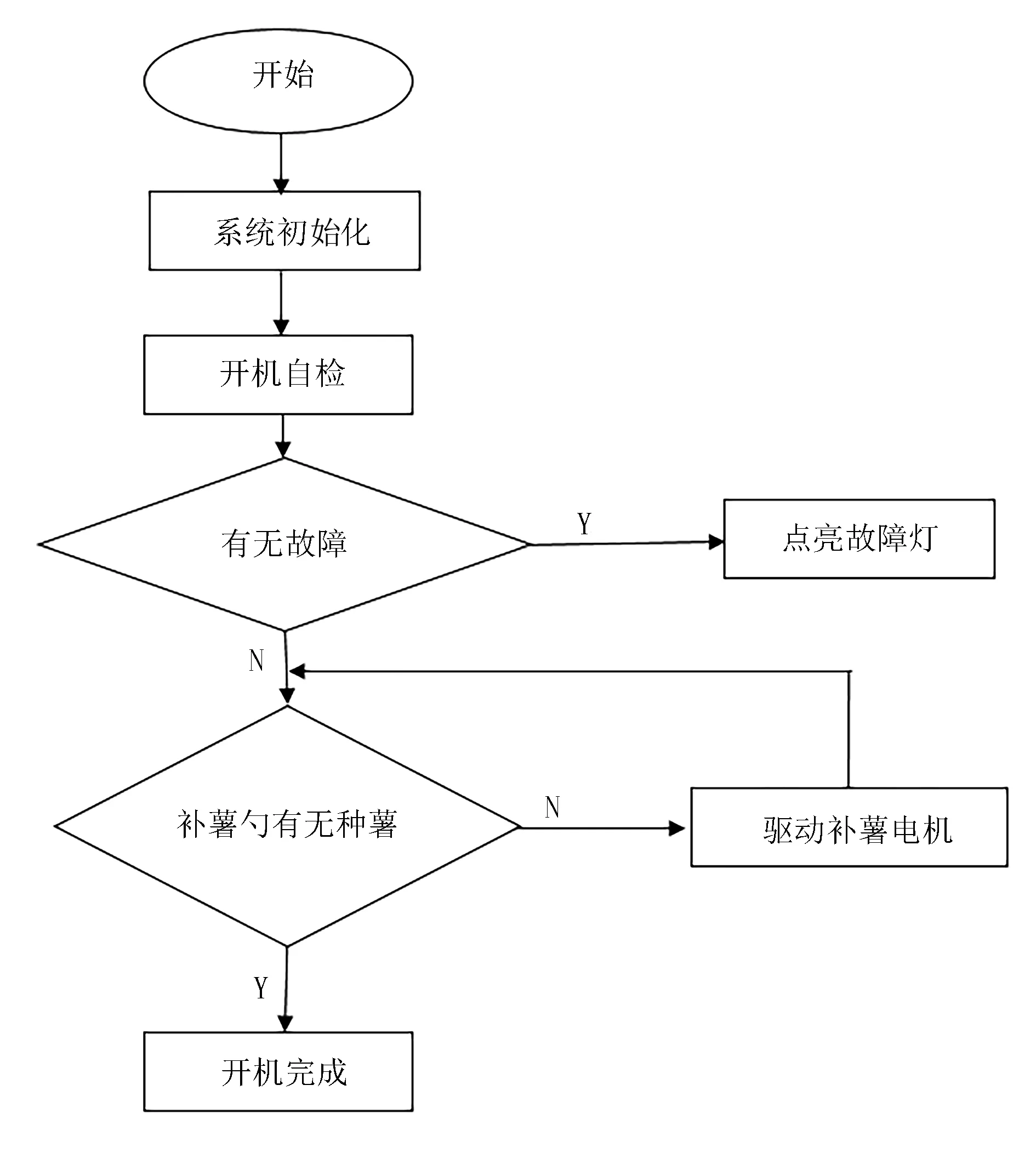
图9 软件系统开机流程图Fig.9 Software system startup flow chart
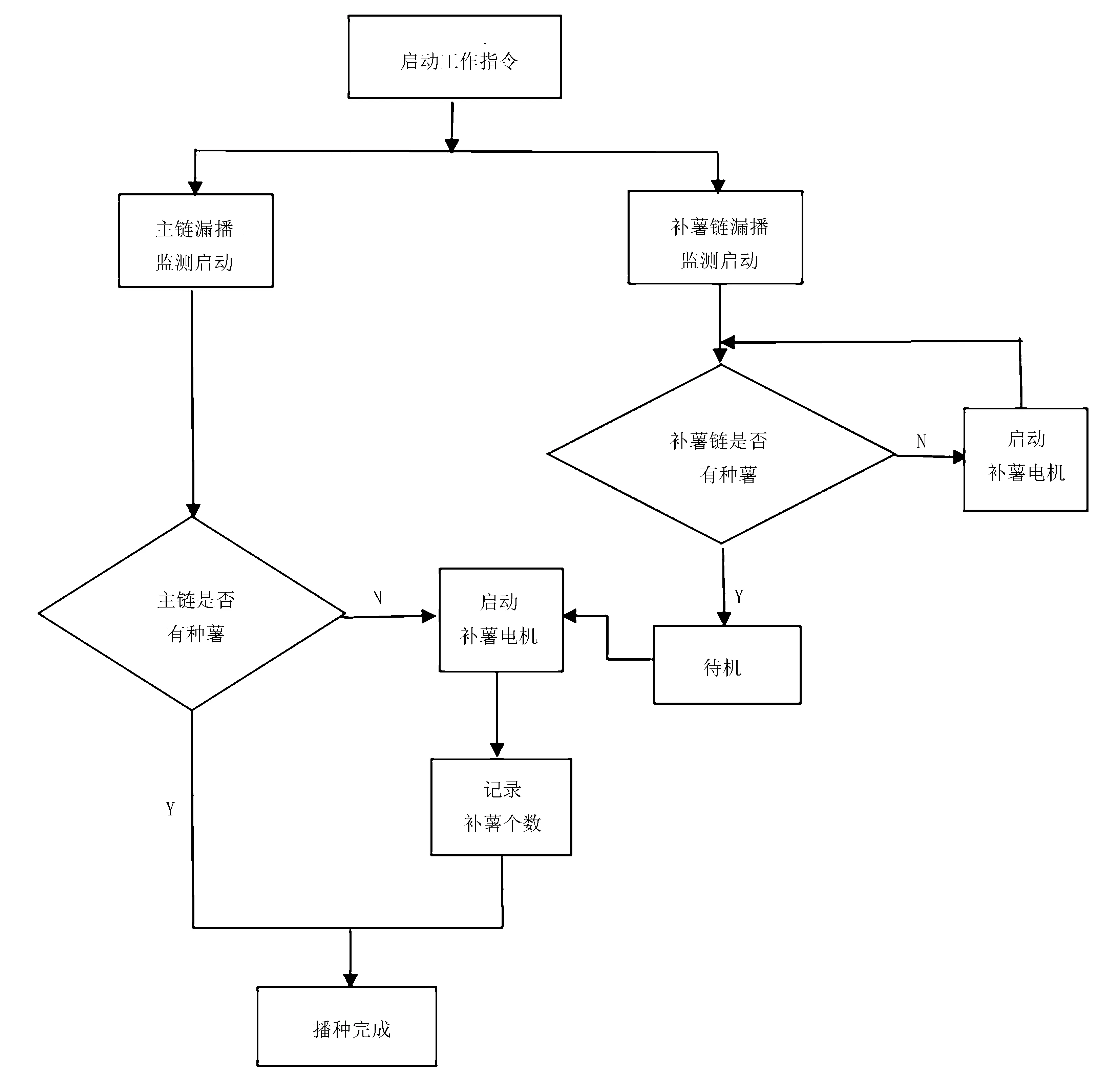
图10 软件系统工作流程图Fig.10 Work flow chart of software system
3 播种性能试验与结果分析
试验选取的地块为重庆市农业科学院建立的“西南马铃薯全程机械化示范基地”,其试验条件如表1所示。
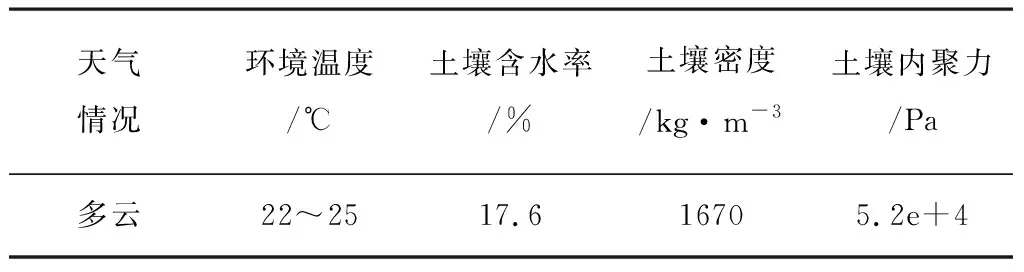
表1 试验条件Table 1 Test conditions
试验分别测试该机具在不同升运链速度下的正常播种率、补种成功率、总播种成功率。试验选取的播种长度为100m,马铃薯种薯和补薯数量若干。其中,补薯采用红色颜料浸泡以区分正常播种的马铃薯,在升运链速度为0.4、0.5、0.6、0.7、0.8m/s的情况下,分别采集正常播种数、漏播数、补偿播种数,以此计算马铃薯播种机的正常播种率、补种成功率、总播种成功率,即


试验中,为了获得更加有效的数据,每个升运链速度测试3次,最后取3次的平均值作为行走速度的各项测试数据。播种农艺按照重庆本地马铃薯机播种植的技术要求,即马铃薯种植密度平均值为4000株/667m2,播种垄面宽度为0.7m,垄沟的宽度为1m,株距约为0.25m。在试验中取数据较为平稳的一段作为本次试验数据,如表2所示。
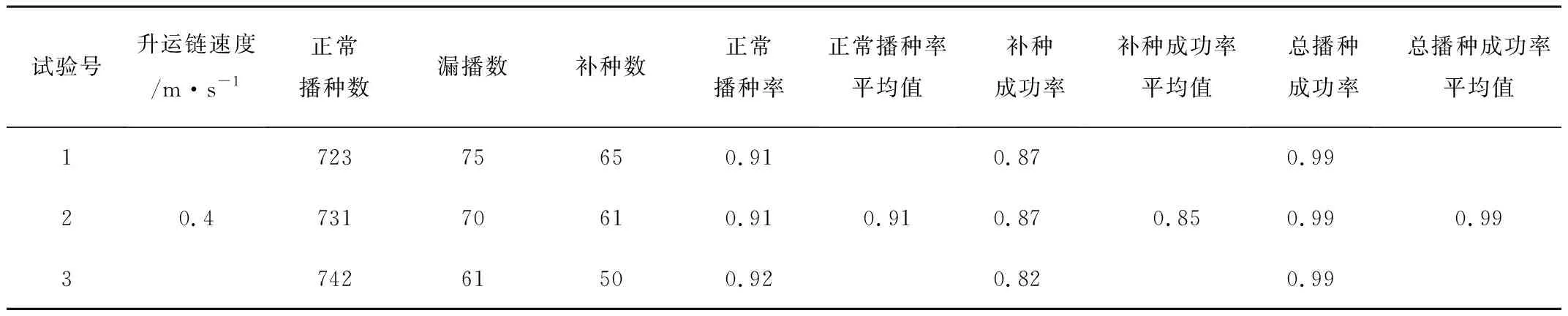
表2 不同播种速度下测定数据Table 2 Measured data under different sowing speeds
由表2可以看出:在没有加装漏播监测及补薯装置的情况下,勺链式马铃薯播种机的正常播种率为78%~91%,且随着升运链速度的加快正常播种率不断降低,属于正常农艺作业要求;当该播种机的升运链速度为0.4m/s时正常播种率为91%,这是由于在低速时取种勺有足够的充种时间,因此其漏播率较低。在加装了漏播监测及补薯系统后,当升运链速度在0.4~0.6m/s之间时都具有较好的补薯效果,总播种成功率均为99%;但在升运链速度继续上升后,随着主播种链的漏播率越来越高,补薯链的作业量也急速增加。由于同样采用的勺链式取种机构,也存在漏播的情况,当播种机的升运链速度超过0.7m/s时,补薯链的漏播率也急速提升,此时播种机的总播种成功率也在急速下降。综上分析,该勺链式马铃薯播种机的最佳升运链速度为0.7m/s。
4 结论
1)设计的马铃薯播种机采用的单行双链式结构,在一定程度上增加了马铃薯播种作业时取种勺的充种时间,尤其是补薯链的充种时间,极大地减少了补薯机构运行时造成的漏播情况。在本次试验过程中,马铃薯播种机的升运链工作速度可以提高到0.7m/s,取得了较好的试验效果。
2)搭载了单行双链式的马铃薯播种机,在系统开机后便完成自检,随即启动补薯链取种勺的漏播监测,即在作业之初补薯机构便会自动工作,直到补薯机构的取种勺有马铃薯种薯时再进入待命状态,缩短了工人的准备时间,同时提高了工作效率。另外,在作业完成后,可以通过控制电机连续运行将补薯机构的所有种薯清除干净,以便于机具的存放,具有较好的应用价值。
