一种马铃薯漏播检测及补偿装置的研制
2016-10-27王关平孙伟
王关平,孙伟
(甘肃农业大学工学院,甘肃 兰州 730070)
一种马铃薯漏播检测及补偿装置的研制
王关平,孙伟*
(甘肃农业大学工学院,甘肃 兰州 730070)
针对现有的链勺式排种器马铃薯播种机作业过程中普遍存在的漏播现象,以PIC16F877单片机为核心,提出了一种由漏播检测启动信号生成电路、红外漏播检测电路和窝眼轮式排种系统构成的漏播检测补偿新方案。漏播检测启动信号生成电路主要由永磁铁和干簧继电器电路构成,每当固定于取种勺底板上的永磁铁略过干簧继电器时,都会触发系统进行一次基于红外信号发射、接收的漏播检测工作,系统软件基于PIC16F877特定引脚上一定时间段内发生电平变化的次数做出是否漏播的判断;如果确定漏播事件发生,PIC16F877将迅速发出补种指令,窝眼轮式排种器在步进电机带动下迅速旋转90°将待补薯种排入导种槽,从而实现漏播补偿。试验结果表明,该系统漏播检测的准确率〉99.8%,补种成功率〉75%,总播种成功率〉96.5%,链勺式排种器马铃薯播种机的漏播被有效抑制。
马铃薯播种机;链勺式排种器;干簧继电器;红外漏播检测;窝眼轮式排种系统
王关平, 孙伟. 一种马铃薯漏播检测及补偿装置的研制[J]. 农业现代化研究, 2016, 37(5): 1008-1014.
Wang G P, Sun W. Development of a kind of potato loss sowing detection and compensation device[J]. Research of Agricultural Modernization, 2016, 37(5): 1008-1014.
解决漏播问题的有效措施是增加播种监测与漏播补偿装置,检测到取种勺上缺种,及时补种[6]。这一领域的研究始于精量播种。早在20世纪40年代起,欧美国家就率先开展了对玉米、大豆等欧美传统大宗农作物精密播种机械的研制[7-9],近年来,其在该领域的研究正在向智能化和特色化方向发展[10-11]。国内农机领域的工程技术人员在此领域也进行了卓有成效的探索,其中大多是对小麦等小粒种子播种过程进行监测和补偿[12-13],也有少量针对大籽粒作物位置无偏差补种系统的研究[14],其漏播监测方案可资借鉴,但其补种方案很难直接应用于马铃薯漏播补偿。
国内关于马铃薯漏播检测与补种的相关研究近几年才开展起来。国内的马铃薯播种以切块薯种植为主,其取种机构、排种方式与小麦、玉米、大豆等有很大不同。事实上,由于马铃薯种子块茎较大、播种间距较大,即使是单粒漏播,造成的影响也相当明显,因此,每粒漏播都应被可靠识别并能及时补种,这就对漏播检测与补偿系统的可靠性提出了更高的要求。张晓东等[15]提出了由红外光电传感器、单片机、步进电机三部分组成的机电式马铃薯播种器自动补偿系统,但其漏播检测方案较原始,可靠性差,且由步进电机驱动盘式补种器补种的方案结构复杂、速度慢,实用性不佳。为此,刘全威等[16]提出了一种基于ATmegal6单片机的红外漏播检测系统和曲柄连杆打击补种机构组成的马铃薯漏播补偿方案,该系统集成度高、方案可行性较好,有较高的推广应用价值,但整个方案的电路硬件、软件设计还有较大的提升空间。因此,本文以正在大规模推广应用的适应于全膜双垄沟播技术的2CM-2型马铃薯播种机为母机,基于PIC16F877单片机,提出了一种由干簧继电器触发红外漏播检测和窝眼轮式排种系统进行漏播补偿的新方案,并用搭建的系统进行台架试验验证了其实用性和可靠性。
1 基于PIC16F877的马铃薯漏播检测及补偿装置
1.1系统方案及工作原理简述
马铃薯播种过程中是否发生了漏播必须首先被快速、可靠地检测出来,以供系统决策,但取种勺是运动的,因此,要求能在一个固定点对经过的取种勺是否成功取种进行检测,这里主要涉及3个问题:1)合理的漏播检测方案;2)检测点位的设置;3)漏播检测的启动时机。
经过深入比选和研究,本文认为采用红外线发射、接收的检测方案较为合适,因为红外信号不易受到干扰,且发射与接收都较为容易,体积小、价格低廉;检测点设置在正常切块薯薯种箱上部显然不太合理,这里虽然空间较大,但固着点缺乏,放置的检测装置容易受到触碰而损坏,最重要的是此时薯种位于取种勺的勺碗之内,露出勺沿以上的部分相对不足,这对检测速度和结果的可靠性会产生严重影响。事实证明,将检测点设置在机身后部的导种槽两侧比较合理,此时,相应的薯种已经掉落至前一个取种勺背后的平板上,外露部分较大,易于探测,且导种槽后部空间很大,易于布置补种箱和其他补偿机构;采用取种勺底座旁放置小型永磁铁,在导种槽某一合适位置开槽放置干簧继电器,每当取种勺到达干簧继电器所在位置时,永磁铁一并到达,此时启动漏播检测,这就解决了漏播检测的时机选择问题。因此,本系统的总体控制方案见图1,其结构布局见图2。

图1 基于PIC16F877的马铃薯漏播检测及补种系统总体方案Fig. 1 The overall scheme of potato loss sowing detection and the compensation system based on PIC16F877
由图1、图2所示,该马铃薯漏播检测及补偿系统主要包括漏播检测启动信号生成电路、红外漏播检测电路及窝眼轮式排种系统。其中,漏播检测启动信号生成电路由永磁铁、干簧继电器和漏播检测启动电平转换电路构成;红外漏播检测电路由红外发射、红外接收及其返回单片机的信号构成(需借助于单片机软件完成漏播判断);窝眼轮式排种系统由步进电机驱动器、步进电机和窝眼轮式排种器构成;而不同单元之间均以PIC16F877单片机为核心进行系统综合和信号衔接。其更为详细的工作原理还需同时结合图3进行说明。
由图3a可知,每一个取种勺的底板侧面均放置一块永磁铁,永磁铁随同勺链一起运动,当永磁铁经过干簧继电器所在处时,干簧继电器的常开触点闭合,则漏播检测启动信号生成电路工作,PIC16F877因此而立即启动红外发射和红外信号接收电路工作,并根据红外信号的接收状况判断是否发生了漏播事件。如果漏播事件发生,单片机立即启动步进电机驱动器,使步进电机带动窝眼轮式排种器排出一粒马铃薯原原种以完成补种工作,同时,补种指示灯会亮0.3 s;播种过程中将自动记录播种的总数目和发生漏播事件的次数,这些信息在LCD显示中给出;系统控制电源由12 V铅酸蓄电池输出经降压、稳压后变为5 V提供,步进电机驱动器的电源则直接取自12 V铅酸蓄电池。
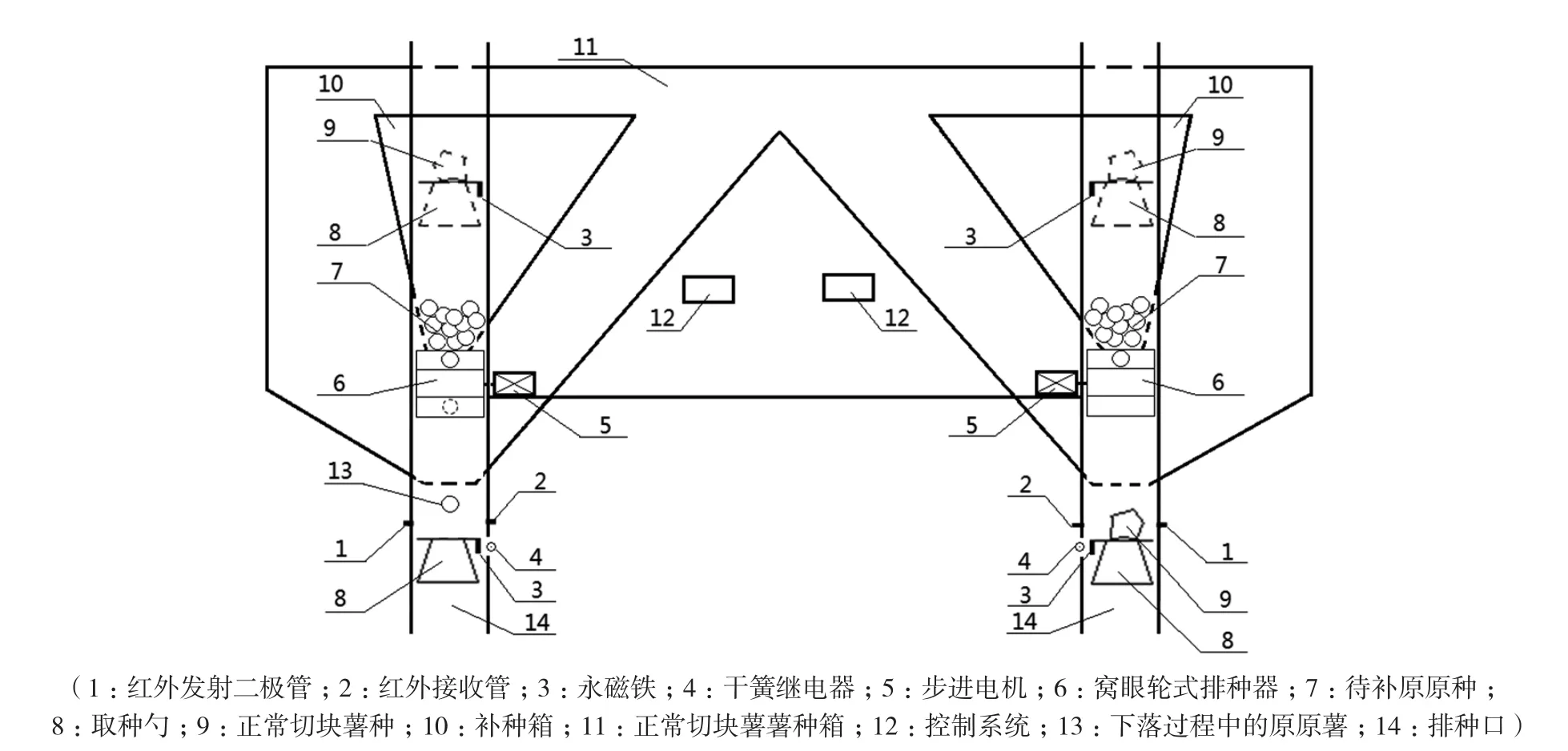
图2 基于2CM-2型马铃薯播种机的漏播检测及补偿系统结构示意图Fig. 2 The structure diagram of loss sowing detection and the compensation system based on the 2CM-2 potato planter

图3 漏播检测启动系统方案及其电路图Fig. 3 Loss sowing detection starting system scheme and its circuit diagram
1.2系统关键环节电路设计
1.2.1漏播检测启动信号生成电路 “漏播检测启动信号生成电路”是为配合“红外漏播检测电路”的工作而设置的,其核心使命是使“红外漏播检测电路”只有在特定地点才能启动,其安装空间布局设计如图3a。由于取种勺的运动速度较快,作业现场尘土飞扬,位置传感器的工作环境恶劣,因此,本研究采用敏感度较高的磁探测原件——RD-07型干簧继电器,以其为核心的漏播检测启动信号生成电路(图3b)。在无磁场作用时,玻璃管中的两个簧片是分开的,PIC16F877的引脚RB4上一直保持为高电平;每当取种勺底板侧面的永磁铁略过干簧继电器RD-7玻璃管附近时,管内的两个簧片被磁化而互相吸引接触,使两个引脚所接的电路连通,引脚RB4立刻被拉成低电平,此时,PIC16F877中设定的电平变化中断被触发,漏播检测启动;当永磁铁离开后,两个簧片由于本身的弹性而分开,引脚RB4又立即恢复为高电平,等待启动下一次工作。1.2.2 红外漏播检测系统电路 由于检测系统会受到附着在光电器件表面和弥漫在导种槽中尘土的影响,为此,必须选择穿尘性好的发光元件和灵敏度高的感光元件;此外,由于需避免杂散日光的干扰,基于技术可行性和经济可行性,本研究采用同平面1发2收的红外原件空间布局检测方案(图4a)。红外漏播检测系统电路具体由以三极管T1和红外发射二极管D1为核心的红外线发射部分、以红外接收管D2和D3为核心的红外信号接收部分以及以三极管T2为核心的红外接收电源VCC控制电路组成,其作用是在单片机PIC16F877协助下做出是否发生漏播事件的判断,其电路图见图4b所示。在PIC16F877的控制下,其RC0端输出43 kHz、占空比为50%的TTL方波,红外发射二极管D1在该信号的控制下向外亦以43 kHz的频率进行红外线辐射;在单片机的输出端RB3发出高电平时,红外接收电源端VCC得电,红外接收管D2和D3所在的电路工作启动;在VCC得电条件下,每当红外接收管D2或D3受到红外信号辐射时,其对应电路分别送至单片机输入口RB5或RB6的信号将由高电平迅速跳变为低电平,此时,系统软件中对应的电平变化中断被触发,系统进入中断处理,最后依据一定时间段内发生电平变化中断次数的多少来做出是否发生漏播事件的判断。
本方案的优势主要体现在以下几个方面:1)同平面1发2收的红外原件空间布局使得可以在软件中设定只有2个接收管同时接收到信号,系统才能判定为漏播,因而系统漏播判断的成功率较高,发生误判的概率低;2)本系统无论是红外线的发射和接收,都是由一定条件触发后才启动的(携带磁铁的取种勺到达了干簧继电器M所在处),而且非常迅速,这有助于杜绝系统在非工作时段受到外界杂散信号的干扰;3)红外发射二极管D1工作启动后,PIC16F877便在100 µs后立即查看RB5、RB6引脚上的电平变化次数,如果2个引脚中的低电平均出现2次或以上,则证明没有薯种存在,即发生了漏播,即使是其中之一的低电平数少于2,则对该引脚再启动一次100 µs的电平状态变化计数操作,如果结论还是如此,则证明没有漏播事件发生,故每一次的漏播检测最多不超过200 µs,即使链条的运行速度达到最快的0.9 m/s,薯种的行程也不超过0.18 mm,即漏播检测的时间开销和行程开销都非常小,因此,系统漏播判断的准确性和可靠性都较高;4)系统的漏播判断是在单片机内依靠特定的软件程序完成的,适当改写相关程序,即可执行新的判断方案,故系统升级灵活方便。

图4 红外漏播检测系统的空间布置和电路图Fig. 4 The space layout and circuit diagram of infrared loss sowing detect system
1.2.3步进电机驱动控制接口电路 补种装置需要在漏播检测部分判定确有漏播事件发生时启动,将待补薯种及时排入导种槽中以完成补种操作。由于切块薯流动性较差,故选用分级后的原原种作为待补薯种。本研究采用窝眼轮式排种器导种槽外侧直排待补薯种的方案,因而,补偿薯种的排种直接、运动行程短,故使用步进电机驱动依然能够保证补种的快速性,其驱动控制电路见图5。
窝眼轮式排种器的质量是1 kg,其直径是100 mm;沿其槽轮顶端切线方向的最大静摩擦力为5 N,所以窝眼槽轮的最大扭矩(T,N·m)为:
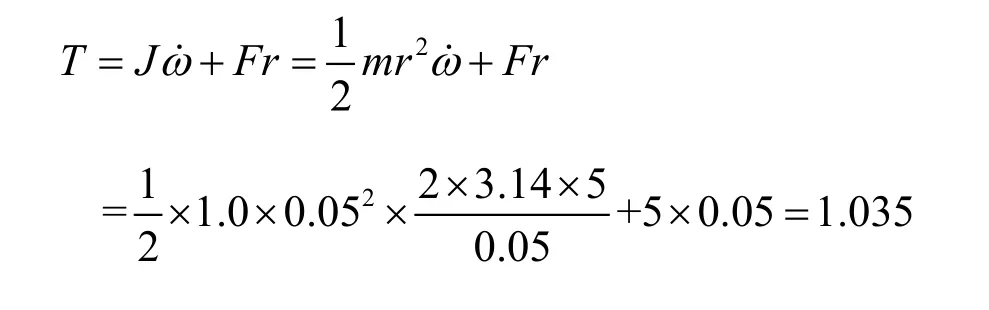
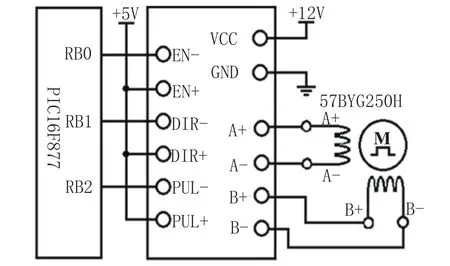
图5 步进电机驱动控制电路Fig. 5 Step motor drive control circuit
式中:J为窝眼轮式排种盘的转动惯量,r为其半径,m为其质量,F为该盘顶端切线方向的最大静摩擦力,ω·为窝眼槽轮从静止状态加速到300 RPM的平均角加速度。选用BYG250H型步进电机,步距角为1.8°,能够满足转角精度的要求;保持转矩为1.4 N·m(〉1.035 N·m)、转动惯量为670 g·cm2(窝眼轮式排种盘的转动惯量 J=m·r2/2=1.0×0.052/2=1.25 g/cm2),能够满足立即停止的要求;与BYG250H型步进电机配合使用的是DM422型步进电机驱动器,采用共阳极接法,单片机RB0输出低电平(高电平)时允许(禁止)驱动器工作,RB1输出低电平(高电平)时步进电机正转(反转),RB2输出脉冲时步进电机转动,且调节该脉冲的频率可以调节步进电机的转速。
2 系统软件设计
系统软件主要由系统主程序和漏播判断补偿中断子程序构成。系统主程序主要负责系统初始化、播种及补种数据显示、补种提示、排种器传动测试以及其它人机应答等工作(图6);而漏播判断补偿中断子程序只有在漏播检测启动信号生成时才能进入执行,实时性要求高,要完成红外线发射、红外接收电源端VCC控制、根据RB5及RB6两引脚上的电平变化特征判定漏播事件发生与否以及据此完成步进电机驱动补种等操作(图7),是系统核心功能所在。
3 系统试验与结果分析
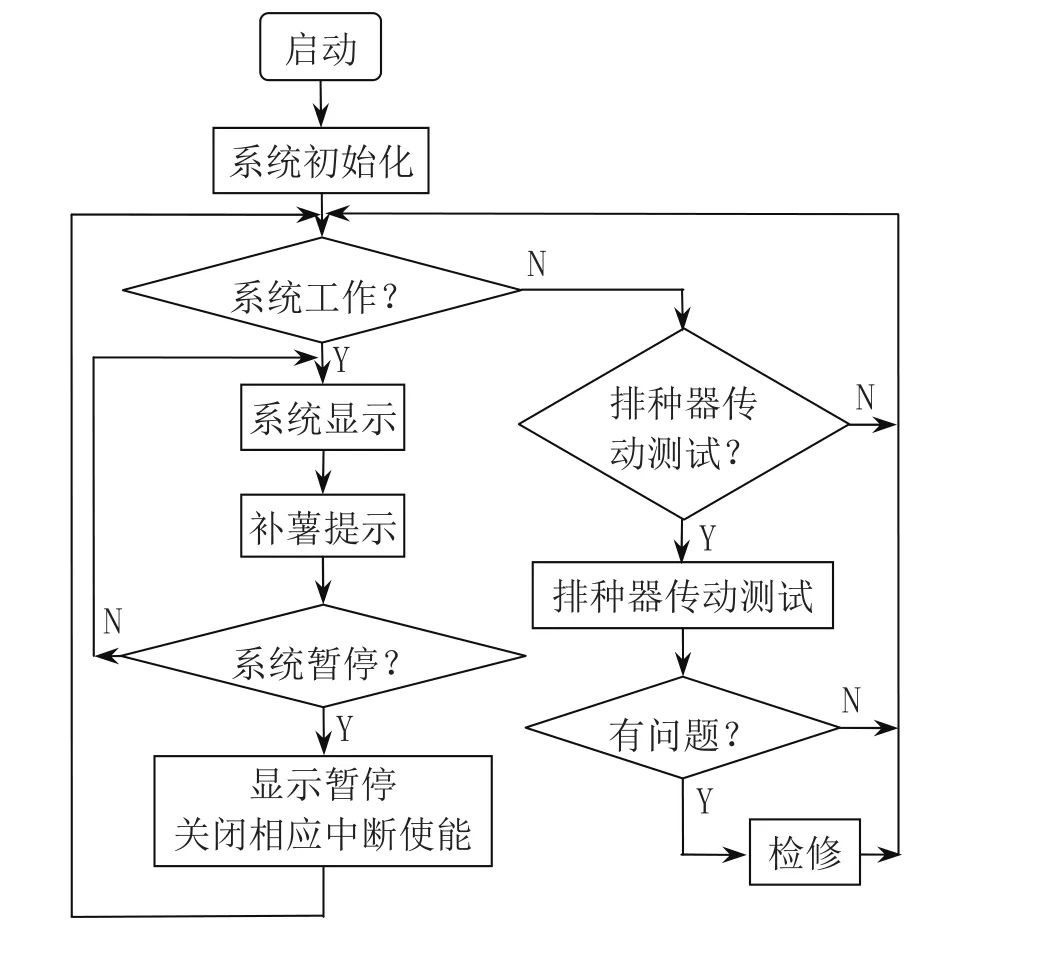
图6 系统主程序结构图Fig. 6 System main program structure diagram
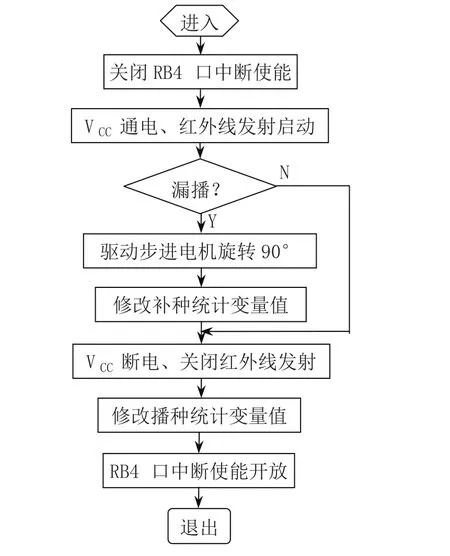
图7 漏播判断补偿中断子程序结构图Fig. 7 Loss sowing judgment and compensation interrupt subroutine structure diagram
基于图1所述的方案搭建漏播检测及补种控制电路系统,DM422型步进电机驱动器外置,在甘肃农业大学农业工程实训中心自制的2CM-2型勺链式马铃薯排种试验台上加装待补原原薯种箱、窝眼轮式排种器、临时托架及置于其上的步进电机进行了台架试验(图8),以测试勺链在不同作业速度下漏播检测与自动补薯系统的性能。勺链与种床带由电机驱动且通过变频器调节其速度,主排种系统采用切块薯,自动补种系统采用直径20-25 mm的原原薯,为了使试验数据具有代表性和实用性,主要在升运链速度为0.3、0.6及0.9 m/s,即慢、中、快三个典型值下进行试验,获取正常播种数n、漏播数q及补播数m的数据,以原始播种率(R0)、补播成功率(R1)和总播种成功率(R2)来检验本漏播检测系统的可靠性和播种速度对补偿系统补种成功率的影响,其计算方法为:
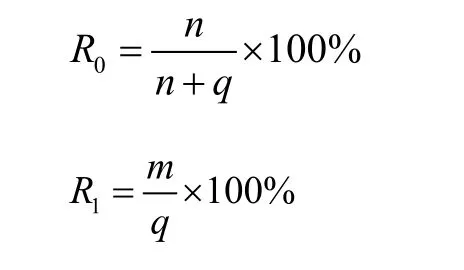


图8 2CM-2型马铃薯播种机台架漏播检测及补种模拟试验Fig. 8 Loss sowing detection and the compensation test based on 2CM-2 potato planter test-bed
不加漏播补种装置的情况下,较低作业速度时(升运链运动速度≤0.3 m/s),原始播种率约为92.0%,较高作业速度时,如升运链速度为0.9 m/s,则正常播种率降为约86%(表1),这证明随着作业速度的加快,漏播率将显著增加;而安装漏播补偿装置之后,在正常升运链速度区间,补播成功率在75%-85%之间,总播种成功率在96.5%-98.5%之间,漏播被显著补偿,总播种成功率显著提升。
然而,试验也发现系统在高速作业情况下补种成功率偏低,主要原因是随着链条运转速度的加快,在相邻两个取种勺距离不变的条件下,留给系统的反应时间将会越来越短,而漏播检测与窝眼轮式排种系统存在最小时间消耗,低于这个时间开销会造成补种失败,漏播检测所需的时间几乎可以忽略,因而,减小步进电机驱动的窝眼轮式排种器运动时间是提高系统在高速作业情况下补种成功率的关键所在,例如,可以选择高速步进电机以减小该部分的时间消耗;窝眼槽轮时有堵塞事件发生,待补原原种的入口是最容易发生堵塞之处,该处的堵塞判断和排堵是研究过程中出现的新问题,可以通过优化结构设计、外加振动等措施改进。

表1 不同升运链速度下的试验数据Table 1 Test data of different speed of ascending chain
4 结论
本文以与全膜双垄沟播技术配套的2CM-2型链勺式排种器马铃薯播种机漏播现象为切入点,深入研究了漏播判定的实现方案、装置位置的布设、漏播检测的启动时机选择及补种执行方案等问题,并在此基础上搭建系统硬件进行了台架试验。结果表明,由漏播检测启动信号生成电路和红外漏播检测电路构成的漏播检测系统的准确率〉99.8%,由步进电机驱动的窝眼轮式排种器结构简单、补种行程短、动作迅速,补种成功率〉75%,总播种成功率〉96.5%,具有进一步改进推广的潜在价值。
[1] 宋言明, 王芬娥. 国内外马铃薯机械的发展概况[J]. 农机化研究, 2008, 30(9): 224-227.
Song Y M, Wang F E. The general development of potato to machinery at home and abroad[J]. Journal of Agricultural Mechanization Research, 2008, 30(9): 224-227.
[2] 杜宏伟, 尚书旗, 杨然兵, 等. 我国马铃薯机械化播种排种技术研究与分析[J]. 农机化研究, 2011, 33(2): 214-217, 221.
Du H W, Shang S Q, Yang R B, et al. Research and analysis on mechanized potato seed sowing techniques[J]. Journal ofAgricultural Mechanization Research, 2011, 33(2): 214-217, 221.
[
3] Sun W, Shi L R, Wang D, et al. Design and test of whole plasticfilm mulching on double ridges potato planter[J]. Energy Education Science and Technology Part A: Energy Science and Research, 2014, 32(2): 1317-1324.
[4] 李明金, 许春林, 李连豪, 等. 2CM-4型马铃薯播种施肥联合作业机的研制[J]. 黑龙江八一农垦大学学报, 2012, 24(1): 14-16.
Li M J, Xu C L, Li L H, et al. Research and development of 2CM-4 sowing and fertilization combined machine for potato[J]. Journal of Heilongjiang Bayi Agricultural University, 2012, 24(1): 14-16.
[5] 李学强, 孙传祝, 卢延芳, 等. 参数可调式马铃薯播种机设计[J].湖北农业科学, 2015, 54(20): 5140-5144.
Li X Q, Sun C Z, Lu Y F, et al. Design on the adjustable parameters potato planter[J]. Hubei Agricultural Sciences, 2015,54(20): 5140-5144.
[6] 李士军, 宫鹤, 顾洪军, 等. 具有自动补种功能的机械精密播种系统的研究[J]. 吉林农业大学学报, 2011, 33(1): 106-109.
Li S J, Gong H, Gu H J, et al. Research on precision seeding system with automatic reseeding[J]. Journal of Jilin Agricultural University, 2011, 33(1): 106-109.
[7] 赵百通, 张晓辉, 孔庆勇, 等. 国内外精密播种机监控系统的现状和发展趋势[J]. 农业装备技术, 2003, 29(4): 11-13.
Zhao B T, Zhang X H, Kong Q Y, et al. The situation and development trend of precision seeder monitoring system at home and abroad[J]. Agricultural Equipment and Technology, 2003,29(4): 11-13.
[8] 张波屏. 前苏联播种机发展现状及特点[J]. 粮油加工与食品机械, 1992(2): 37-40.
Zhang B B. Current situation and characteristics of the former Soviet Union seeding machinery[J]. Machinery for Cereals, oil and Food Processing, 1992(2): 37-40.
[9] 陆黎, 胡建平, 王韩伟. 精密播种机监控系统的发展现状及创新研究[J]. 农机化研究, 2005, 27(2): 13-15.
Lu L, Hu J P, Wang H W. Innovation study and development status of detection-control system of precision seeder[J]. Journal of Agricultural Mechanization Research, 2005, 27(2): 13-15.
[10] Du R C, Gong B C, Liu N N, et al. Design and experiment on intelligent fuzzy monitoring system for corn planters[J]. International Journal of Agricultural & Biological Engineering,2013, 6(3): 11-18.
[11] Singh T, Mane D. Development and laboratory performance of an electronically controlled metering mechanism for okra seed[J]. Agricultural Mechanization in Asia, Africa and Latin America,2011, 42(2): 63-69.
[12] 龚丽农, 员玉良, 尚书旗, 等. 小区播种机电控系统设计与试验[J]. 农业工程学报, 2011, 27(5): 122-126.
Gong L N, Yuan Y L, Shang S Q, et al. Design and experiment on electronic control system for plot seeder[J]. Transactions of the Chinese Society of Agricultural Engineering, 2011, 27(5): 122-126.
[13] 丁幼春, 王雪玲, 廖庆喜. 基于时变窗口的油菜精量排种器漏播实时检测方法[J]. 农业工程学报, 2014, 30(24): 11-21.
Ding Y C, Wang X L, Liao Q X. Method of real-time loss sowing detection for rapeseed precision metering device based on time changed window[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(24): 11-21.
[14] 朱瑞祥, 葛世强, 翟长远, 等. 大籽粒作物漏播自补种装置设计与试验[J]. 农业工程学报, 2014, 30(21): 1-8.
Zhu R X, Ge S Q, Zhai C Y, et al. Design and experiment of automatic reseeding device for miss-seeding of crops with large grain[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(21): 1-8.
[15] 张晓东, 吴建民, 孙伟, 等. 马铃薯播种器自动补偿系统的设计[J]. 甘肃农业大学学报, 2013, 48(1): 145-149.
Zhang X D, Wu J M, Sun W, et al. Design of automatic compensation system for potato planter[J]. Journal of Gansu Agricultural University, 2013, 48 (1): 145-149.
[16] 刘全威, 吴建民, 王蒂, 等. 2CM-2型马铃薯播种机漏播补偿系统的设计与研究[J]. 干旱地区农业研究, 2013, 31(3): 260-266.
Liu Q W, Wu J M, Wang D, et al. Design and test of a microcomputer-controlled loss sowing compensation system for 2CM-2 potato seeder[J]. Agricultural Research in the Arid Areas,2013, 31(3): 260-266.
(责任编辑:童成立)
Development of a kind of potato loss sowing detection and compensation device
For the problems of loss sowing in the operation of the potato planter with the chain-scoop metering device,based on microchip unit PIC16F877, a new scheme which is composed of loss sowing detection start signal generation circuit, infrared loss sowing detection circuit and socket-roller seed metering system is put forward. Loss sowing detection start signal generation circuit mainly consisted of the permanent magnets and a reed relay circuit, when every permanent magnet which is fixed to the plate of the seed spoon skips over the reed relay, the loss sowing detection will be trigged basing on the infrared signal emission and receiving, the system can make the judgment whether loss sowing occurs based on the number of level changes in particular pins of PIC16F877 during a certain period; in the case of loss sowing, a reseeding directive from PIC16F877 will be issued immediately, the socket-roller seed metering device will rotate 90° rapidly driven by the step motor, as a result, a potato seed will be released into the slipping groove, and the loss sowing compensation is realized. The experimental results show that the system performance is reliable, the accuracy of loss sowing detection is not less than 99.8%, the success of loss sowing compensation is greater than 75% and the total seeding success is above 96.5%, loss sowing of the potato planter with the chain-scoop metering device is suppressed significantly.
the potato planter; chain-scoop metering device; reed relay; infrared loss sowing detection; socket-roller seed metering system
the Fundamental Research Funds for the Colleges and Universities of Gansu Province (2013); Sheng-Tong-Sheng Science and Technology Innovation Fund (GSAU-STS-1337).
SUN Wei, E-mail: sunw@gsau.edu.cn.
16 February, 2016;Accepted 31 May, 2016
S223.2
A
1000-0275(2016)05-1008-07
10.13872/j.1000-0275.2016.0059
甘肃省高等学校基本科研业务费资助项目(2013);盛彤笙科技创新基金(GSAU-STS-1337)。
王关平(1975-),男,宁夏彭阳人,副教授,主要从事农业电气自动化研究,E-mail: wangguanping@gsau.edu.cn;通讯作者:孙伟(1980-),男,甘肃高台人,副教授,主要从事现代旱作农机装备技术研究,E-mail: sunw@gsau.edu.cn。
2016-02-16,接受日期:2016-05-31
WANG Guan-ping, SUN Wei
(College of Engineering, Gansu Agricultural University, Lanzhou, Gansu 730070, China)
随着我国马铃薯种植规模的不断扩大,马铃薯种植的机械化程度不断提高,但我国大部分地区采用切块薯种植,由于薯块形状、大小不一,且薯块与取种勺的尺寸配合未必适当,因此种勺取种时容易因为漏取而造成漏播,这将导致不应有的减产[1-3]。针对这种情况,可以采用人工补种,该方式不但劳动强度大,而且效率低下,补种的成功率和可靠性都很低,此外,增加的用工成本和生产成本也非常可观;也可通过改进马铃薯播种机的结构等措施来减少漏播率,但这些改进使得系统复杂化,虽然漏播率有所降低,但与期望的≤1%的目标依然有不小的差距[4-5]。