基于环量控制的无尾飞翼俯仰和滚转两轴无舵面姿态控制飞行试验
2023-10-17张刘黄勇陈辅政朱正龙郭天豪姜裕标周铸
张刘,黄勇,陈辅政,朱正龙,郭天豪,姜裕标,周铸
1.中国空气动力研究与发展中心 低速空气动力研究所,绵阳 621000
2.中国空气动力研究与发展中心 计算空气动力研究所,绵阳 621000
传统机械操纵面飞行控制是通过移动和/或偏转翼面/部分翼面来改变机翼的局部几何形状和有效弯度,进而使得机翼上的压力分布发生变化,获得飞行姿态控制所需的控制力和力矩[1-2]。但操纵舵面偏转破坏了飞机精心设计的气动隐身外形,显著增大了全机的雷达反射面积,降低了低可观测性;机翼分段设计,活动面与安定面及活动面之间产生的缝隙、尖锐边缘,以及为安装活动面所需要的作动系统及铰链机构产生的鼓包、台阶等破坏了机翼无缝和光滑连续设计准则,增加了额外的气动阻力和雷达反射面积[2-4];作为被动控制方式,操纵能力和控制效率受到机械系统和舵面饱和的限制,在某些状态下可能失效;高载荷活动部件致使结构重量大,易磨损和产生机械故障[5],维护保障复杂等限制了无尾飞翼布局飞行器气动/隐身/控制/结构一体化综合性能提升。
射流环量控制对机翼后缘固定几何型面进行操作,引入压缩气体产生高速射流,在柯恩达效应作用下射流偏转并附着在弯曲的壁面产生“虚拟舵面”,高速射流裹挟外界自由流加速并发生偏转[6-8],改变机翼表面的压力分布,获得飞行控制所需的操控力和力矩。在不需要升降舵、副翼等大载荷活动部件的情况下实现无舵面飞行控制,减小机体结构、机械驱动系统等的复杂度和重量[2,8-10]。
美国从20世纪70年代就开始环量控制技术研究[11-15],目的是实现低速条件下的环量增升控制,以代替襟翼等高升力装置获得短距起降能力。然而研究发现通过环量来增加升力对于实际的应用越来越困难[2],庞大的引气量及较大半径钝尾缘产生的附加阻力严重影响了飞机的操作效率,高引气质量流量也导致了系统集成问题。这时研究人员发现环量控制还能为飞行器提供飞行控制所需的操控力和力矩,且作为力矩控制所需的引气量相比于有效高升力所需的引气量大大减少,使得无舵面飞行控制集成飞行试验成为了可能。
2010年BAE系统公司与英国多所高校合作研发的DEMON(恶魔)无人验证机由辅助动力装置(APU)驱动专用压缩机提供压缩空气,利用环量控制技术实现滚转姿态控制飞行验证[16]。2019年BAE系统公司和曼彻斯特大学联合开发的“Magma”(岩浆)飞翼布局无人机,通过对Hawk240R发动机的压缩机重新设计,在最大推力状态获得主流量约9%的压缩气体,在直线水平飞行过程中,以增量控制方式验证了环量控制用于滚转姿态控制的可行性[4]。
南京航空航天大学史志伟团队[5,17-18]采用电动涵道风扇作为压缩气体来源,先后将环量控制技术应用于常规布局无人机、鸭式布局无人机和飞翼布局飞行平台,通过飞行试验研究了主动流动控制激励器的姿态控制规律。国防科技大学罗振兵团队[19]基于零质量合成双射流激励器作为滚转控制作动器,基于常规布局无人机开展了飞行验证试验。
环量控制已被用于许多无人机无舵面飞行控制演示验证[16-20],主要用于取代传统的机械副翼实现滚转姿态控制,但俯仰姿态环量控制存在更大的技术挑战和系统风险:飞行器俯仰姿态操纵不同于滚转姿态操纵,属于“角位移”操纵,俯仰环量激励器需要持续、稳定作动并提供足够的操纵能力,确保飞行器达到平衡所需的姿态角并保持稳定;俯仰环量激励器需要具有较小的响应迟滞和较高的作动频率,确保飞行器在侧风、突风等扰动条件下纵向短周期模态稳定;环量激励器及其作动系统较弱的控制能力、较差的控制稳定性、较大的控制响应迟滞,在纵向姿态操纵中容易诱发振荡导致姿态角发散,使系统不可控。之前的研究由于采用开环射流作动系统,无法定量给出激励器的特性及激励器特性与飞行姿态操纵之间关系,无法剥离激励器本身控制响应延迟研究飞行器姿态控制随射流作动变化的时间响应特征。
本文主要关注环量控制用于飞行器纵向和横向运动姿态操纵的控制稳定性,剥离射流作动系统本身控制响应特性研究射流作动飞机运动姿态响应的动态特性;通过激励器终端压力反馈,定量研究射流舵面的控制特性和姿态控制能力。
飞翼布局具有较高的气动效率和更好的气动隐身性能,常作为下一代高隐身作战平台的首选布局[21]。相较于传统布局飞行器,无尾飞翼布局飞行器具有更加复杂的操稳特性和更加严重的非线性特征[22-23],且其纵向操纵力臂较短,使得基于无尾飞翼布局无人机的纵向和横向姿态无舵面环量控制技术研究具有更加重要的意义和价值。
本文以自主设计的无尾飞翼布局无人机为验证平台,首次提出基于激励器射流通道压力反馈的射流闭环控制策略,采用基于集气环的涡喷发动机引气方案,并自主开发机载多通道闭环射流作动系统,实现动态气源条件下射流的精准、稳定和快响应控制,通过多通道环量激励器组合控制实现俯仰和滚转姿态角的双向连续控制;在前期俯仰和滚转两轴无舵面姿态控制带动力模型风洞虚拟飞行试验的基础上[24],搭建飞行验证平台,采用全自主飞行控制方式和舵面无极切换控制策略,通过复杂大气环境下的飞行试验定量研究环量控制用于无人机飞行姿态控制的能力,以期展示环量控制在改善飞翼布局飞机隐身性和机动控制特性方面的应用前景。
1 射流作动系统
环量控制通过驱动压缩空气射流来改变流经机翼尾缘的空气流动方向,改变局部压力分布从而产生相应的控制力矩,因此实现射流快速、精准、稳定控制是环量控制技术工程应用的关键。射流作动系统包括引气系统、气源控制系统、环量激励器,用于解决机载压缩气体引入、控制、射流执行的问题。自主设计并开发基于激励器终端压力反馈建立闭环的伺服作动系统,像传统机械舵面伺服作动系统一样,飞行控制计算机根据姿态控制指令解算出环量激励器压比指令,并通过PWM(Pulse Width Modulation)信号将压比指令实时传给环量控制器,实现终端环量激励器压力的高精度、高频响控制,射流作动系统架构及其在飞机上的布置见图1。

图1 射流作动系统架构及其实现Fig.1 Architecture and implementation of jet actuator system
1.1 引气系统
引气系统[25]基于30 kg推力涡喷发动机改造,如图2所示,在发动机稳定段嵌入集气环,自压气机扩压器出口收集高压气体,具备持续引气能力,最大引气压力3.2 bar(1 bar=100 kPa),压缩气体最高温度120 ℃,最大引气质量流量45 g/s。压缩气体来源于发动机冷却气体,实现了压缩气体引出流量及流量变化与发动机推力的解耦,与Magma验证机引气系统不同,当射流作动系统不工作时,无需使用排气阀等任何额外装置,对发动机性能和系统影响小。该种机载引气方式结构和系统简单、体积小、成本低,且引出气体压力大,射流能量高,控制能力强,覆盖较大飞行速度范围对压缩空气射流需求。通过地面试验台建立激励器压力与质量流量之间对应关系,通过设置临界压力限制引气质量流量上限,对发动机进行保护,防止引气流量超限导致涡轮过热发生损坏。

图2 涡喷发动机及引气系统Fig.2 Turbojet engine and bleed system
1.2 闭环控制策略
在复杂动态条件和大气环境下,上游压缩气体特性随发动机转速动态变化,下游射流舵面压比需求随飞行姿态、飞行速度、大气环境等动态变化,对射流作动系统的闭环控制和动态特性提出了更高的要求;由于气体具有较大的压缩性,激励器内气体特性的精确和快速控制更加困难。对于固定几何尺寸的环量激励器和相同特性的压缩气体,压力是衡量射流速度、质量、动量等特性的直接参数和唯一参数,其与环量控制特性一一对应,可建立环量控制特性与激励器压比的映射关系。基于此,本文提出基于压力反馈的闭环控制策略[26]。采用高频响压力传感器,提高控制系统的动态特性;对压力进行控制,控制分辨率高,提高控制精准度;压力传感器体积小,便于系统集成和多余度可靠性设计。
1.3 环量激励器
射流舵面是实现无舵面飞行姿态控制的作动器,称为环量激励器,如图3所示。激励器射流缝高度为0.3 mm,柯恩达型面为半圆型,曲率半径为4.5 mm,展向长度为222 mm,与机械升降舵面展向长度相同。在激励器入口下游布置压力和温度传感器,作为激励器终端的控制反馈。压力传感器采集频率10 kHz、精度0.1%FS。

图3 环量激励器的外形Fig.3 Shape of circulation actuator
激励器终端压力传感器测量得到射流通道压缩气体总压,其与大气参考压力的比值定义为射流压比π(π≥1),将压比减去1后的值作为压比指令和响应。飞行过程中,控制射流通道压比,等同于控制“射流虚拟舵面”的“偏转角度”,改变飞行器的气动力和力矩,进而控制飞行器的飞行姿态。激励器有2个相互独立的射流通道,其中上缝射流定义为A状态,下缝射流定义为B状态,参考机械舵面舵偏角处理方式,A状态激励器压比δp记为正值,表示“射流虚拟舵面”正偏,产生正的升力增量和负的俯仰力矩增量;B状态激励器压比δp记为负值,表示“射流虚拟舵面”负偏,产生负的升力增量和正的俯仰力矩增量,如图4所示。

图4 激励器状态及压力定义Fig.4 Definition of actuator state and pressure
2 飞行试验平台及方法
2.1 试验平台及舵面方案
飞行试验平台采用自主设计的等展弦比(展弦比A=4.58)无尾飞翼布局无人机,该无人机采用双后掠气动设计,纵向静不稳定,如图5所示。飞行试验模型内部集成射流作动系统、动力系统、组合式油箱、大气系统、飞控系统、伺服作动系统和起落架等。通过台式扭摆法测量了飞机空油时的三轴转动惯量,模型主要参数见表1。

表1 模型主要参数Table 1 Main parameters of model

图5 无尾飞翼无人飞行试验平台Fig.5 Tailless flying wing unmanned flight test platform
无人机操纵舵面布置见图5,从机身到翼尖分别是机械升降舵面、射流舵面、机械副翼和上、下扰流板。规定:升降舵后缘下偏为正;左副翼后缘上偏、右副翼后缘下偏为正;左扰流板打开舵偏为正。左、右机翼各有1个环量激励器,分别为左激励器(左机翼环量激励器)和右激励器(右机翼环量激励器),共有4个具备独立控制功能的射流通道,通过对射流通道组合控制分别形成射流升降舵、射流副翼控制功能,具备俯仰控制、滚转控制能力,通道组合策略见表2。

表2 射流通道组合控制策略Table 2 Control strategy of jet channel combination
2.2 数据采集与传输
飞行控制周期5 ms,操纵指令信号采样频率为500 Hz,飞行参数记录周期为20 ms,大气传感器的采样频率为50 Hz。
2.3 试验方法及验证策略
飞行试验采用全自主方式进行,巡航高度200 m,飞机从0点起飞爬升到巡航高度后在1点右转沿四边形航线飞行,然后回到起飞段航线并在5点着陆,飞行航线如图6所示。

图6 飞行航线Fig.6 Flight route
将射流作动系统与飞行控制系统融合,无人机到达预定航段后,飞行控制系统自主触发开展环量激励器控制性能测试:在A点打开俯仰环量控制激励器,在1.00 s内将射流升降舵面控制权限提高至1,机械升降舵面偏角回到0°并锁死,在A-B段开展射流升降舵控制模式飞行验证,在B点,关闭射流升降舵面,通过机械升降舵面控制无人机纵向姿态稳定;在C点,无人机打开滚转环量控制激励器,在1.00 s内将射流副翼舵面控制权限提高至1,机械副翼舵面偏角回到0°并锁死,在C-D段开展射流副翼控制模式飞行验证,在D点,关闭射流副翼舵面,通过机械副翼控制无人机横向姿态稳定。本文重点关注A-B段和C-D段俯仰环量控制和滚转环量控制情况下无人机姿态的动态响应,给出了切换控制阶段无人机迎角α、侧滑角β、滚转角φ、升降舵面偏角δe、副翼舵面偏角δa、扰流板舵面偏角δr、俯仰角速度q、滚转角速度p、偏航角速度r随时间的变化曲线。
2.4 飞行控制律
在巡航阶段,采用油门闭环控制飞行速度。纵向运动内环为俯仰角θ控制系统,进行高度保持,控制原理如图7所示,其中,V为飞行速度;θc为俯仰角控制指令;δT、δTC分别为油门变量、油门控制指令;引入俯仰角速度q反馈以增加系统阻尼,对俯仰角偏差采用比例积分控制;Kq为俯仰角速度回路增益,主要起到提高短周期运动的阻尼比、减小系统震荡特性的作用;Kθ为俯仰角控制比例增益;Kθi为俯仰角控制积分增益,主要消除控制系统稳态误差,提高控制精度。横航向运动内环为滚转角控制和侧滑角控制系统,分别反馈角速度信号改善系统阻尼,对角度偏差采用比例积分控制。

图7 纵向运动内环控制原理框图Fig.7 Functional block diagram of longitudinal inner loop control
3 试验结果分析
机场跑道海拔高度1 300 m,巡航阶段飞行速度60 m/s,基于平均气动弦长的飞行雷诺数3.6×106,采用无极舵面切换控制方式,分别测试了环量激励器在无人机纵向姿态操纵和横向姿态操纵中的控制效果。
3.1 俯仰控制
射流升降舵切换控制前、后飞行状态无人机右侧机翼视角对比如图8所示,可以发现切换控制前,机械升降舵上偏,切换控制后,机械升降舵面偏角为0°,飞机保持纵向稳定飞行。图9给出了射流升降舵飞行验证过程的飞行参数变化。射流升降舵面切换控制前,机械升降舵负偏约2.5°以产生抬头力矩保持无人机在4.3°迎角附近纵向配平飞行。在A点切换为射流升降舵控制模式,机械升降舵偏角调整为0°,射流舵面下缝射流压比逐渐增加,机翼尾缘升力减小,产生抬头力矩,射流舵面压比-1.025产生的抬头力矩保持纵向力矩配平。
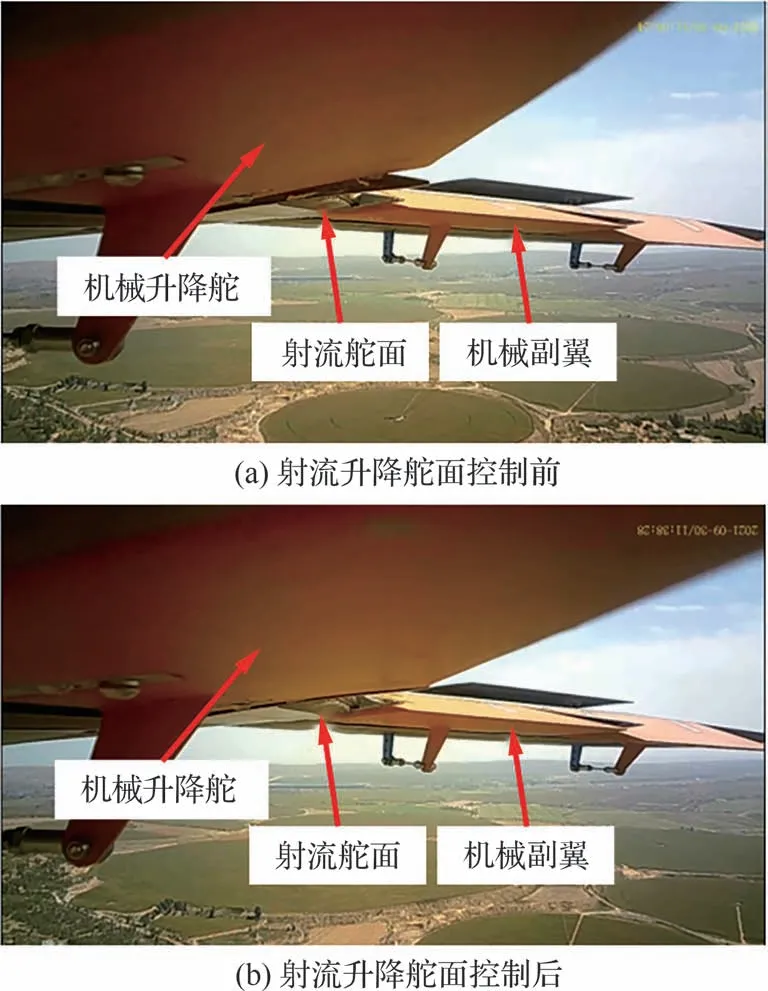
图8 射流升降舵面切换控制前、后舵面及飞行状态对比Fig.8 Comparison of control surfaces and flight states before and after switching control of jet elevator
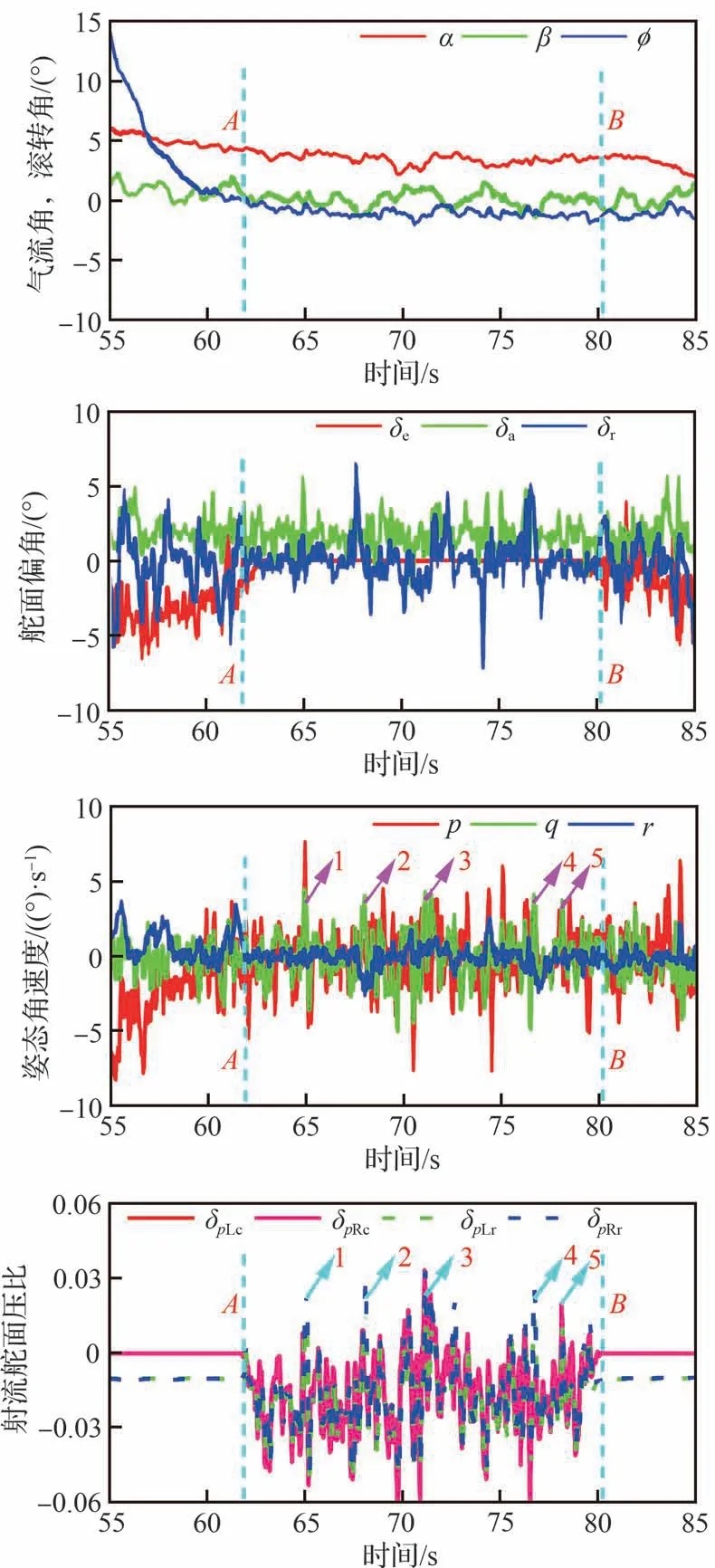
图9 射流升降舵飞行试验飞参变化过程Fig.9 Change process of flight parameters in jet elevator flight test
观察左、右激励器压比响应δpLr、δpRr与压比指令δpLc、δpRc随时间变化曲线,射流作动系统关闭状态,由于激励器当地压力低于大气参考压,所以射流舵面压比显示不为0,但实际无射流从射流舵面喷出。射流作动状态,射流舵面压比响应和压比指令吻合较好,两者之间时间延迟小于1个记录周期(0.02 s),说明射流作动系统响应延迟小,响应速度快。俯仰角速度尖峰对与射流舵面压力响应尖峰一一对应,如图9尖峰1、2、3、4、5所示,两者之间时间差小于1个记录周期,说明飞机姿态角速度与射流作动保持较高的一致性,即射流作动与飞机外部绕流场作用形成新的流场改变飞机受力和力矩的时间小于1个记录周期,从飞机内环控制的角度来说,射流作动引起的飞机气动响应时间可以忽略。射流升降舵控制纵向姿态过程中,俯仰角速度和俯仰角保持稳定,满足无人机纵向姿态稳定控制要求。由于加工误差等原因,飞机本体有一个正的滚转力矩,副翼需始终保持约2.0°舵偏以平衡模型非对称产生的滚转力矩保持横向姿态角稳定。
3.2 滚转控制
射流副翼切换控制前、后飞行状态无人机右侧机翼视角对比如图10所示,可以发现切换控制后,无人机在射流副翼控制下实现了向右滚转。射流副翼切换控制前后的飞行姿态参数变化如图11所示。130~135 s,无人机在约-24°滚转角下左转弯,机械副翼舵偏角在2.0°附近波动,滚转角速度为0,机械副翼舵面正偏产生的左滚转力矩用于克服无人机本体非对称产生的右滚转力矩。C点射流副翼开始介入控制,机械副翼偏角迅速减小至0°并锁定,射流副翼压比为0,副翼舵偏减小,产生右滚力矩和正的滚转角速度,最大滚转角速度为12.10 (°)/s,无人机向右滚转。接着左射流舵面下缝射流压比逐渐增加,左机翼升力减小,右射流舵面上缝射流压比逐渐增加,右机翼环量增加,升力增加,产生左滚力矩,滚转角速度逐渐减小,滚转角继续减小,141 s滚转角减小至0°,此时射流副翼压比1.05产生的左滚力矩与2.0°机械副翼舵偏角产生的滚转力矩相当,飞机在射流副翼作用下保持横向姿态稳定。D点射流副翼切换为机械副翼,切换前后无人机三轴姿态保持稳定,偏航角速度和侧滑角较小,射流副翼没有耦合产生航向控制力矩,可以实现横航向解耦控制。
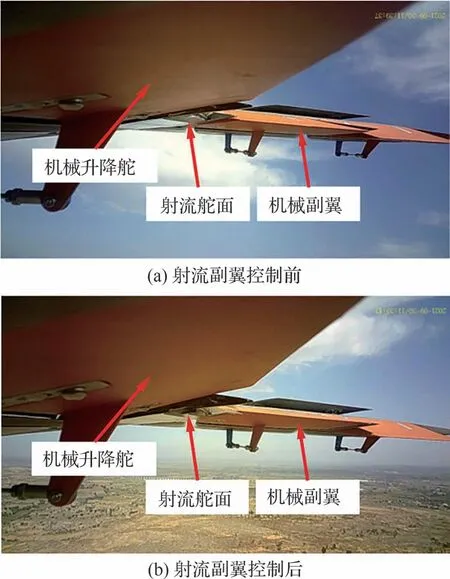
图10 射流副翼切换控制前、后舵面及飞行状态对比Fig.10 Comparison of control surfaces and flight states before and after switching control of jet aileron
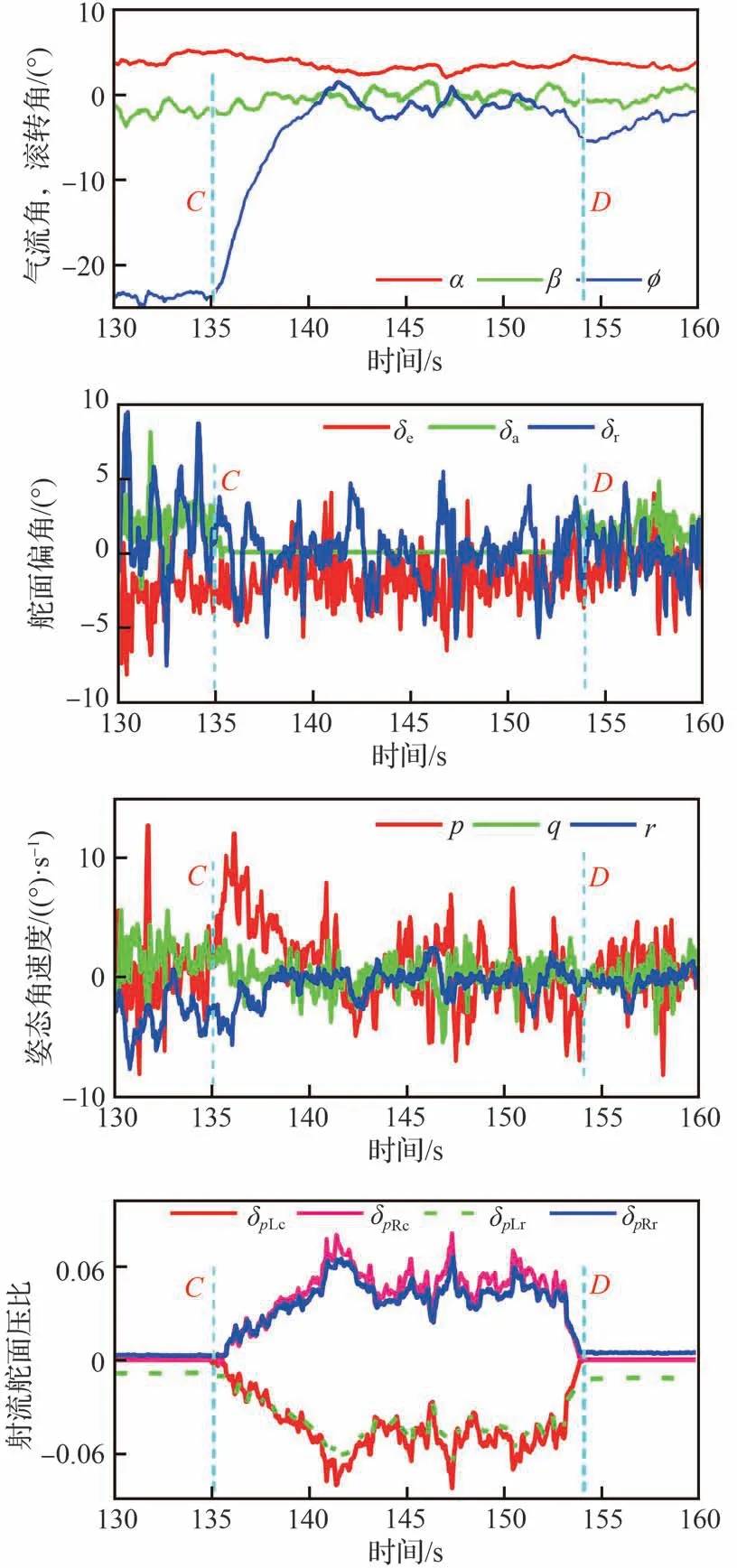
图11 射流副翼飞行试验飞参变化过程Fig.11 Change process of flight parameters in jet aileron flight test
将射流作动系统融合进飞行控制系统中,实现了环量控制的闭环控制,通过全自主飞行控制完成了基于环量控制的俯仰和滚转两轴无舵面大气自由飞行试验。由上述飞行参数变化可知,在射流舵面飞行姿态控制过程中,飞行器三轴姿态保持稳定可控,表明提出的射流作动架构和基于此开发的射流作动系统控制稳定、响应快,可满足飞行姿态控制对操纵系统的性能要求。
4 结 论
基于无尾飞翼布局无人机搭建了飞行验证试验平台,采用自主开发的闭环控制射流作动系统和全自主飞行控制方式,通过60 m/s巡航速度下的大气自由飞行试验,定量研究了环量控制用于俯仰和滚转姿态控制能力,得到如下主要结论:
1)左、右机翼环量激励器射流通道组合可产生双向连续、稳定的俯仰和滚转控制力矩,实现俯仰和滚转两轴无舵面姿态控制。
2)自主开发的射流作动系统可实现射流舵面持续、稳定的作动,射流舵面压比响应和压比指令之间吻合较好,时间响应延迟小于0.02 s,无人机姿态角速度响应与射流舵面压比之间响应延迟小于0.02 s,即射流与绕流场相互作用建立新流场改变飞行器气动力/力矩的响应时间小于0.02 s。
3)射流升降舵面压比-1.025与机械升降舵-2.5°舵偏角产生的俯仰力矩相当,可满足纵向姿态控制要求,射流副翼压比1.050与机械副翼2.0°舵偏角产生的滚转力矩相当,可满足横向姿态控制要求。
