非线性力支承下的磁悬浮转子陀螺效应解耦控制
2023-10-16窦甄杨立平任正义孙苗苗
窦甄,杨立平,任正义,孙苗苗
(1.哈尔滨工程大学 机电工程学院,哈尔滨 150001;2.哈尔滨工程大学 工程训练中心,哈尔滨 150001)
主动磁轴承(Active magnetic bearing,AMB)与传统的滚动轴承和滑动轴承相比,具有轴承转子动力学参数可调、无磨损、无润滑系统、低损耗、功耗低等特点,因而受到广泛的关注[1]。将AMB 与飞轮结合能够有效提高系统的储能量和储能效率[2]。
在高转速下由于陀螺效应导致径向磁轴承控制的四个自由度高度耦合,这种耦合产生了转子的进动和章动。受到电流功率放大器带宽、非线性电磁力和外部扰动的影响,高转速下章动难以控制,这成为系统失稳的主要原因[3-5]。因此研究主动磁悬浮转子的非线性力补偿和解耦控制技术对于系统的稳定运行具有重要意义。
电磁力的非线性和陀螺效应分别是电磁轴承和转子运动的固有特性,但又受到控制算法的影响。对于非线性电磁力,文献[6-8]借助庞加莱映射、渐进法、多尺度法分析了PID 控制下的动力学特性。研究结果表明不合理的控制参数和较大的转子质量偏心均有可能导致转子的倍周期运动、拟周期运动和混沌运动等非线性现象。但均局限于对PID 参数定量分析以减弱非线性现象。神经网络具有很强的非线性估计能力,本文将研究如何通过自适应径向基神经网络(Radial basis function neural network,RBFNN)补偿方法来消除电磁力的非线性影响。
对于转子陀螺效应的控制,常见的解耦算法主要可以分为交叉反馈方法、逆系统方法和智能控制方法等。文献[9-11]研究了应用于磁悬浮转子的交叉反馈方法,并做出了一定的改进提高了控制性能。但该类算法只能实现x方向和y方向两个自由度解耦,无法实现径向四自由度完全解耦。并且对于功放的延迟、系统的建模误差等因素均会导致该类算法解耦效果大大下降。
逆系统方法的研究集中于逆模型的获取和伪线性系统的控制。魏彤等将 α阶逆系统方法与滑模控制结合获得了优于PID 加交叉解耦控制方法的解耦效果[3]。Chen 等采用 α阶逆系统与内模控制算法结合,一定程度上减小了算法的复杂性[12]。逆系统方法虽思路容易理解、能对系统完全解耦,但存在逆系统求取过程非常复杂、对建模误差敏感等问题。
智能控制方法对模型具有自适应性,不依赖于准确的数学模型,且能对建模误差进行补偿,相较于交叉反馈和逆系统方法有着明显的优势。Yu 和Wang 等分别采用BP 神经网络与逆系统和自抗扰控制相结合实现了风力涡轮转子和三极电磁轴承的解耦控制[13-14]。与BP 神经网络相比径向基神经网络在不减弱函数逼近能力的基础上避免了多层结构,具有结构简单、收敛快速的优势[15]。文献[15-17]已将RBFNN 用于解决电磁轴承中的一些问题,但这些研究多局限于单自由度。对于多自由度系统的控制,文献[18]中采用滑模控制(Sliding mode control,SMC)算法控制磁悬浮飞轮系统,并获得了优于PID 的响应特性和鲁棒性能。
基于上述研究的局限性,本文结合SMC 与RBFNN的优点,针对以下问题进行研究:1)推导非线性电磁力作用下的径向四自由度被控对象模型。2)提出一种具有自适应性的RBFNN 补偿方法。在自适应RBFNN 的基础上设计改进的SMC 算法,以实现解耦控制、抑制转子的不平衡扰动、随机扰动、改进抖振问题。3)根据Lyapunov 理论证明算法整体即自适应RBFNN&SMC 的稳定性。4)通过仿真将本文算法和PID 算法、α阶逆系统方法对比,验证算法的扰动抑制能力、解耦效果、非线性补偿能力和抖振抑制能力。
1 非线性电磁轴承-转子动力学模型
1.1 力学模型
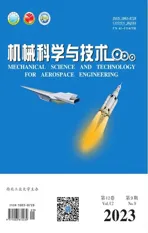
以立式磁悬浮飞轮为研究对象,其受力简图如图1 所示。根据实际工况,做如下假设:飞轮绕转动轴循环对称,绕x轴和绕y轴的赤道转动惯量相等;飞轮工作转速小于1 阶弯曲临界转速,认为是刚性转子;由于轴向自由度振幅远小于径向自由度振幅,即可忽略转子的轴向振动,仅考虑转子的径向4 个自由度的振动[19]。
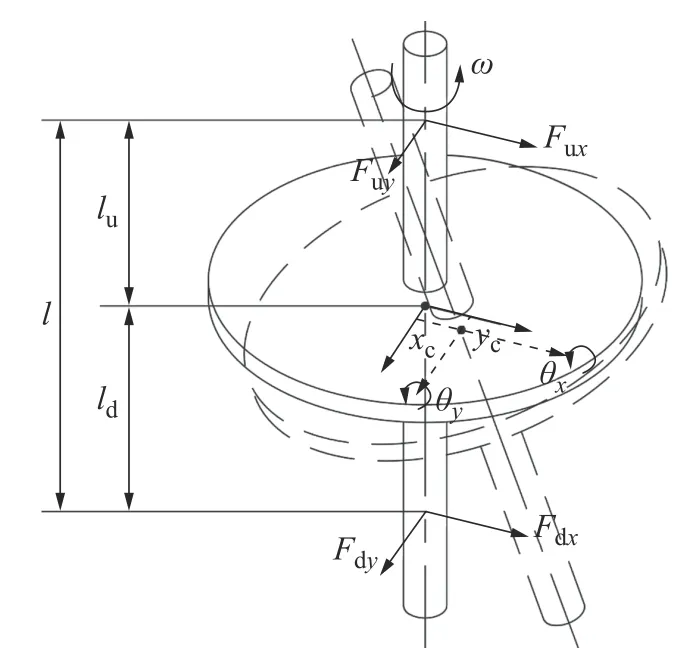
图1 转子受力简图Fig.1 Simplified diagram of rotor forces
其动力学模型为
式中:m为 转子质量;e为质量偏心距;J为赤道转动惯量;Jz极转动惯量;ωz为飞轮转速;t为时间。
式(3)为陀螺矩阵,在Jz一定时,陀螺矩阵受转速 ωz影响,即转速越高,陀螺效应越强,自由度之间的耦合也越强。在转速一定时,对于Jz较 小的细长轴来说,转速不高时陀螺效应往往可以忽略。但飞轮需要用Jz的惯性来储能,在相同转速下会产生远强于细长轴的陀螺效应,在高速时表现更为显著。
电磁力不直接作用于质心坐标qc,而是作用于电磁轴承的几何中心坐标q。q=[xuyuxdyd]T,xu、yu、xd、yd分别表示上电磁轴承几何中心x、y方向的位移和下电磁轴承处x、y方向的位移。坐标q对应的电磁力矢量F=[Fux Fuy Fdx Fdy]T。根据几何关系,qc与q存在的坐标变换关系为:
式中:l为两电磁轴承几何中心距离;lu为转子质心与上电磁轴承几何中心距离;ld为与下电磁轴承几何中心距离,如图1 所示。根据力的等效关系,Fc与F的线性变换关系为
将式(5)及式(8)代入式(1),整理得
1.2 非线性电磁力模型
电磁轴承的一个自由度采用差动放大进行控制,控制简图如图2 所示。
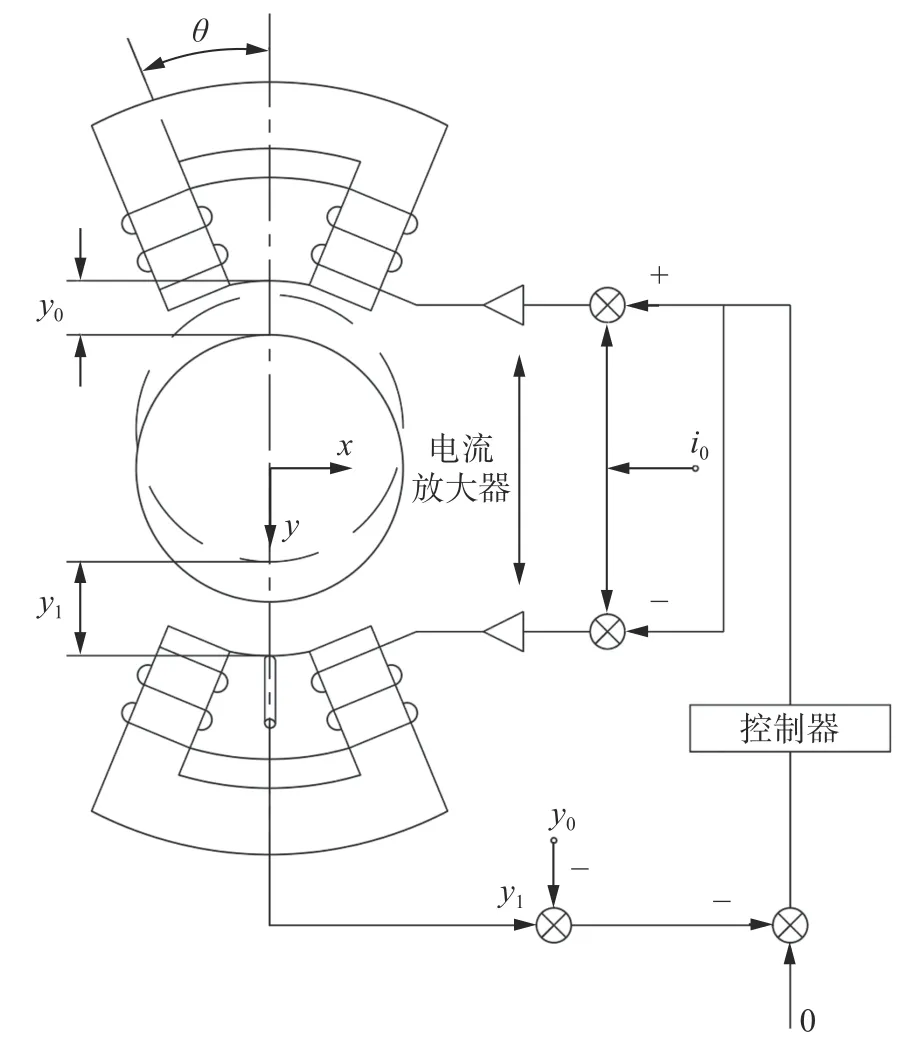
图2 电磁轴承控制回路示意图Fig.2 Schematic diagram of the electromagnetic bearing control circuit
非线性电磁力大小与控制对象的位移和控制电流有关,则有[20]
式中:μ0为真空中的磁导率;N为单个磁极线圈匝数;S为磁极面积;i0为偏置电流;iy为y方向的控制电流;y0为y方向的初始间隙;y为y方向轴心位移量;θ为磁极半夹角。
式中:Kx=diag(kx,kx,kx,kx);Ki=diag(ki,ki,ki,ki);i为电磁轴承坐标q这4 个坐标对应的控制电流,i=[iux iuy idx idy]T;R0为坐标q对应的电磁力非线性余项,R0=[Rux Ruy Rdx Rdy]T。将式(13)代入式(10),整理可得
2 自适应RBFNN&SMC 控制
2.1 SMC 算法解耦
定义控制误差e=qd-q,qd为期望位移矢量。取滑模函数为
式中:Λ为元素均大于0 的对角矩阵,可用于调节滑模函数收敛到零的速度;s=0为滑模超平面。取Lyapunov 函数为
将式(14)代入式(16)可得
将e=qd-q和式(17)代入式(13)可得
由此根据式(18)可依据如下思路设计解耦算法:
1)将滑模面设计为解耦后的闭环系统,由于Λ 为对角阵,滑模面为无耦合的一阶线性系统。
根据上述思路设计
式中γ 为元素均大于0 的对角矩阵。
为说明该控制规律可以实现上述3 条设计思路,可将控制电流函数式(19)代入式(13)可得闭环后的系统,即
当t→+∞时有
此时等式两边的非线性项和陀螺力矢量相互抵消,即实现了非线性力和陀螺力的补偿,整理可得:
由于vsgn(s)足以抑制扰动 τd,且质量矩阵M正定,只需选取合适的 γ即可保证系统收敛至滑模面s=0,即获得解耦后的系统为+Λe=0。具体的稳定性证明见2.3 小节。
2.2 自适应RBFNN 补偿
相较于交叉反馈解耦方法和逆系统方法,RBFNN对陀螺效应补偿无需引入转速反馈,根据径向4 个自由度的误差信号结合自适应算法可实现g的准确估计。减少了传感器且避免了该传感器带来额外的干扰,具有明显的优势。
图3 自适应RBFNN&SMC 控制闭环框图Fig.3 Closed-loop diagram of adaptive RBFNN&SMC control
RBFNN 输入输出的计算式为:
式中:ε为RBFNN 逼近的误差;cj为第j个神经元高斯函数中心点向量;bj为第j个神经元高斯基函数的宽度;W为最佳逼近时的权值矩阵。
取g的逼近为
式中φ为元素大于0 的对角矩阵。
2.3 自适应RBFNN&SMC 算法稳定性证明
其稳定性需要综合滑模函数和RBFNN 权值误差。根据Lyapunov 稳定性理论,可选取Lyapunov函数V′为
2.4 SMC 鲁棒项的改进
由于 sgn(s)在零点处不连续,当系统到达滑模面后,控制电流会在滑模面附近产生高频抖振。控制电流的高频成分会在电磁轴承中产生高频电磁场,进而带来系统能耗升高、发热、干扰其他设备等问题。因此,将SMC 用于电磁轴承系统必须改善抖振问题。可采用双曲正切函数tan(s/δ)代替 sgn(s),从而克服抖振问题。δ为一较小的正实数用于调节双曲正切函数拐点处变化的快慢[21-22]。其中tan(s/δ)为
开关函数 sgn(s)与双曲正切函数 tan(s/δ)曲线如图5 所示。
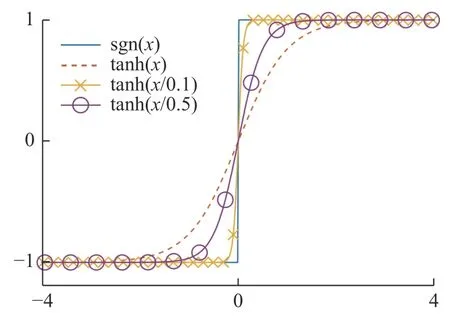
图5 开关函数、双曲正切函数曲线Fig.5 The switching function and hyperbolic tangent function curves
综上所述,由自适应RBFNN 滑模控制算法得到的电流控制规律可总结为:
3 仿真验证及分析
3.1 算法抗干扰能力对比
分别对分布式PID 控制算法和自适应RBFNN滑模控制算法进行仿真并对比。仿真系统参数如表1 所示,控制参数以20 000 r/min 最高转速整定。
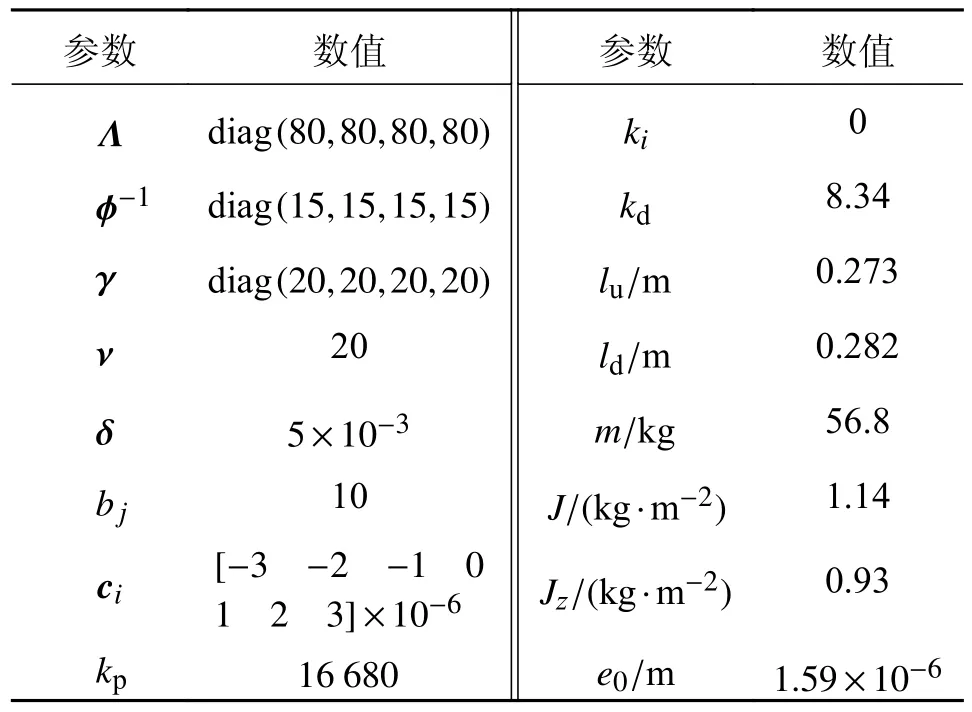
表1 系统计算参数Tab.1 System calculation parameters
图6 和图7 为在PID 算法和自适应RBFNN 滑模算法下,考虑转子质量偏心激励,转子以1 00 r/s2的加速度从静止加速到20 000 r/min 时的振动响应曲线。采用PID 控制算法在1 阶临界转速处出现最大振幅1.741×10-6m,转速为4 500 r/min。而本文算法在20 000 r/min 出现最大振幅1.416 8×10-8m,相较于前者最大振幅降低了99.2%。由此可见,本文算法消除了1 阶临界转速引起的剧烈振荡,对不平衡质量产生的振动抑制效果显著。
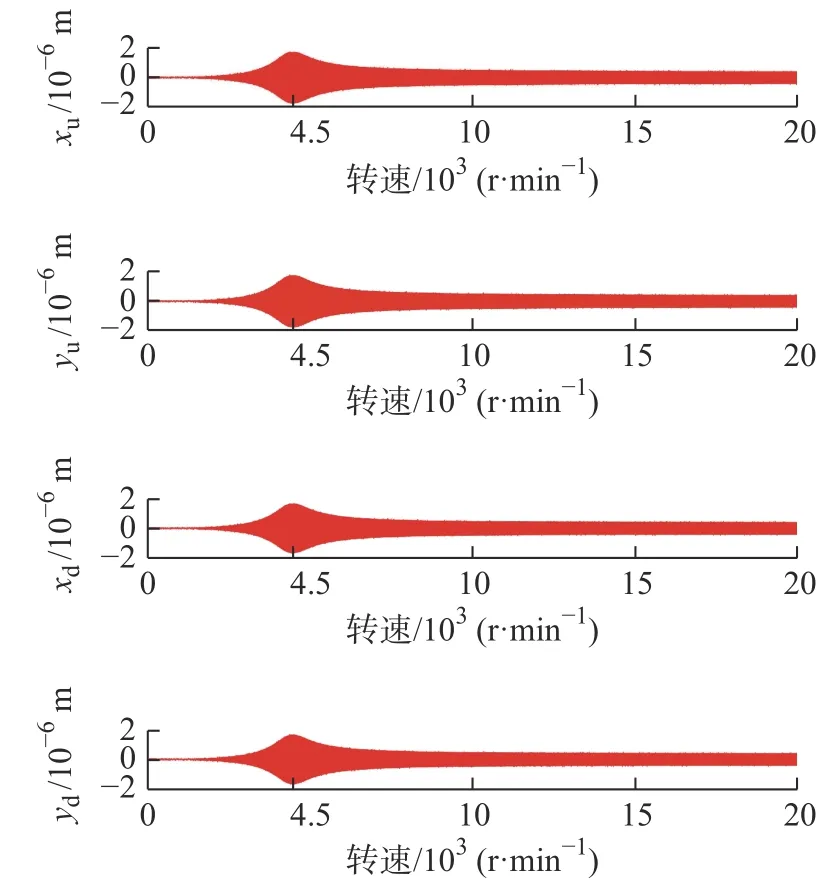
图6 PID 算法下加速响应曲线Fig.6 The acceleration response curve under the PID algorithm
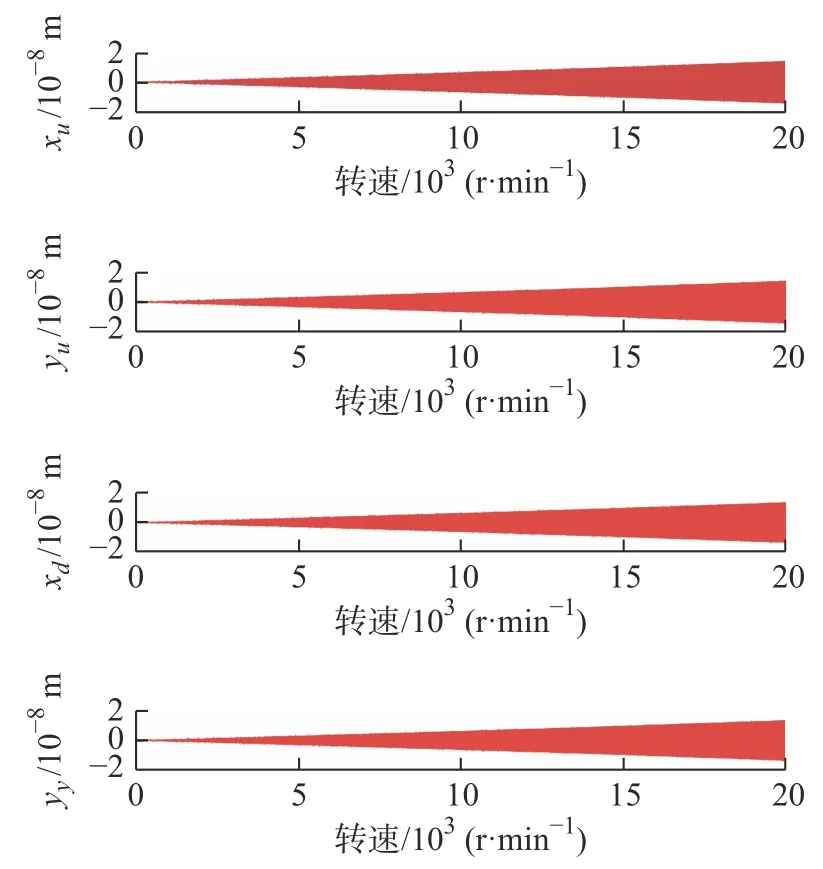
图7 本文算法下加速响应曲线Fig.7 The acceleration response curve under the proposed algorithm
为进一步验证算法的可行性,从600 W·h 磁悬浮飞轮实验台7 500 r/min 匀速旋转的实验数据中提取出位移噪声信号并加载至系统的反馈通道进行仿真。图8 为实验样机的本体,该试验台采用模拟量的分布式PID 控制电磁轴承。采集信号的RP6600电涡流位移传感器分辨力可达0.03 μm,本实验的采样频率为3 kHz,为最高工作转速频率的10 倍左右。位移信号主要来源为PWM 产生的噪声、位移传感器的测量噪声和转子不平衡质量产生的振动。其中转子不平衡质量产生的振动为仿真已建模部分,需要滤去以避免重复加载。鉴于其他噪声为高频噪声,本文采用4 阶Butterworth 高通滤波算法滤去低频的不平衡质量的振动信号。

图8 600 W·h 磁悬浮飞轮实验样机本体Fig.8 600 W·h magnetic suspension flywheel experimental prototype
图9 为xu信号实验数据的滤波效果图,其中实线表示实验数据减去滤波获得的噪声信号,虚线表示实验数据。图10虚线部分为相应的高频噪声信号曲线。可以看出所得噪声信号为数据中的高频部分;同时可知,即使是系统响应的低频部分,也并非只有转速同频成分,波形并非简单的线性输入输出关系。
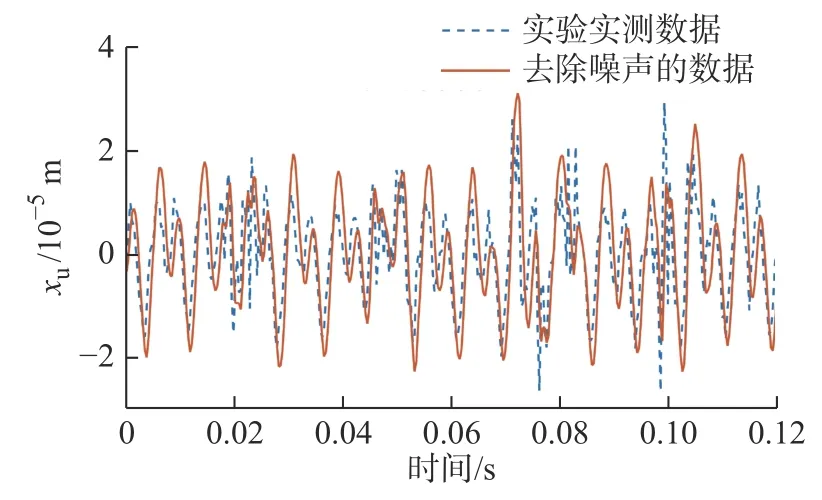
图9 实验数据滤波效果图Fig.9 The effect of filtering on experimental data
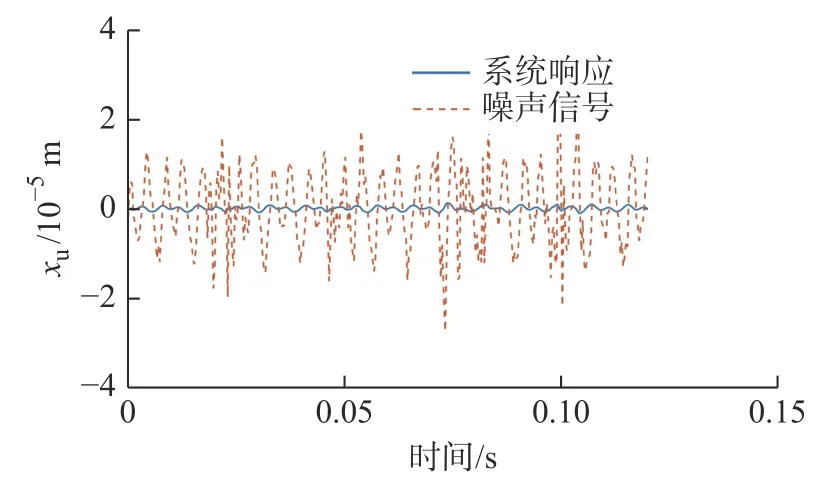
图10 本文算法上电磁轴承x 方向噪声曲线及响应曲线Fig.10 Noise curve and response curve in the x-direction of electromagnetic bearing under the proposed algorithm
图10 和图11 为xu自由度受到滤得噪声干扰时各个自由度的振动响应曲线。xu振动的最大幅值为1.25 μm,相比输入的噪声幅值降低了95.9%。从图11 中可以看出在其余自由度未产生明显的干扰,其波形依旧为不平衡质量产生的简谐波形。这是因为RBF 神经网络能够很好的模拟出各个自由度之间的耦合动力学行为,并在控制电流中实时产生分量实时进行补偿,从而有效抑制了上下电磁轴承间和x与y方向之间的相互干扰。图12 为所有自由度均受到相应滤得噪声干扰时的系统响应,各个自由度的振幅均在2 μm以内,仅为PID 控制下响应振幅的十分之一。由此可见本文算法有着很强的抗干扰能力。
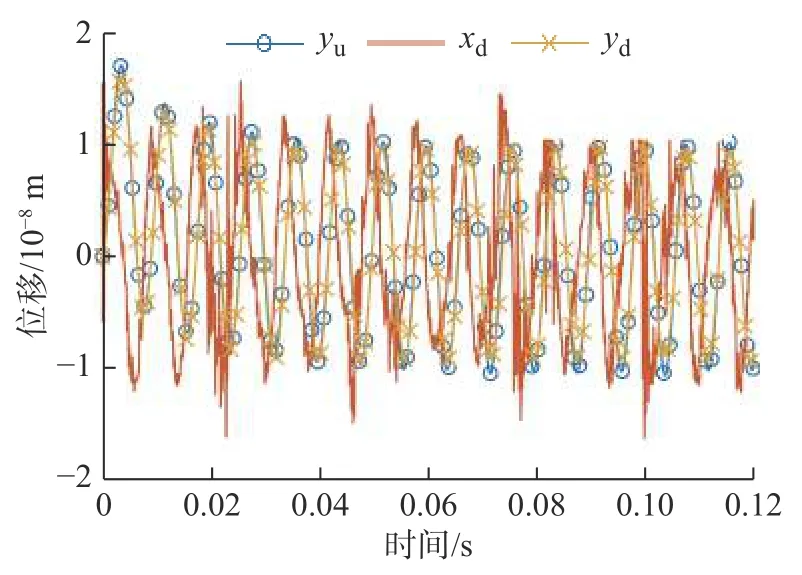
图11 本文算法yu、xd、yd 噪声干扰响应曲线Fig.11 Disturbance response curves of yu,xd,and yd under the proposed algorithm
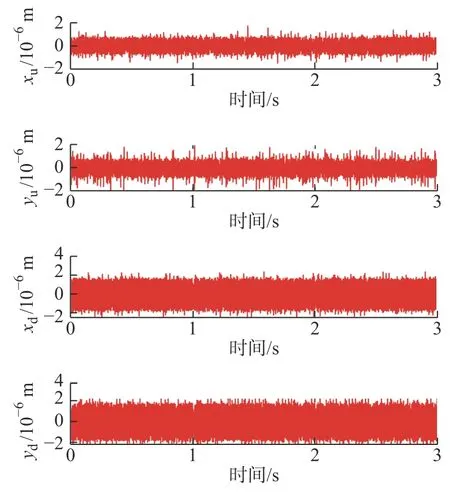
图12 本文算法所有自由度受扰响应曲线Fig.12 Disturbance response curves of all degrees of freedom under the proposed algorithm
3.2 解耦效果对比
不考虑受迫振动,当初始状态xu存在1×10-4m的初始偏移,以4 500 r/min 匀速旋转时,在本文算法与PID 和 α 阶逆反馈解耦算法的各个自由度振动响应如图13~图16 所示,其中 α 阶逆反馈解耦算法按文献[12]设计,唯一的设计参数τ 取1.5×10-3。从图中可以看出本文算法解耦效果优于α 阶逆反馈解耦算法。PID 算法下xu振动衰减95%约为47 ms,在α阶逆反馈解耦算法下约为16.5 ms,而在本文算法下为35 ms,相较于PID 时间缩短了25.5%。图14~图16为未受扰自由度的振动响应对比,PID 控制下最大振幅出现在xd的响应中,幅值为 5.94×10-5m,为初始扰动的59.4%,在 α 阶逆反馈解耦算法下该值为3.43×10-5m,为初始扰动的34.3%,而本文算法下仅为1.63×10-7m,为初始扰动的0.163%。即未经解耦的PID 控制会导致各个自由度之间产生较为剧烈的相互干扰,而本文算法能够有效抑制未受扰自由度产生振动。
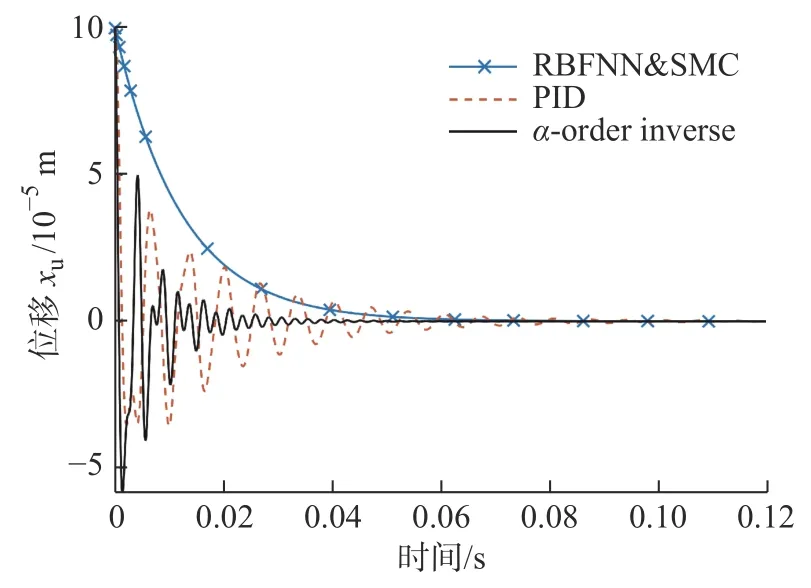
图13 4 500 r/min xu 非零初始状态响应对比Fig.13 Response comparison of xu with nonzero initial state at 4 500 r/min
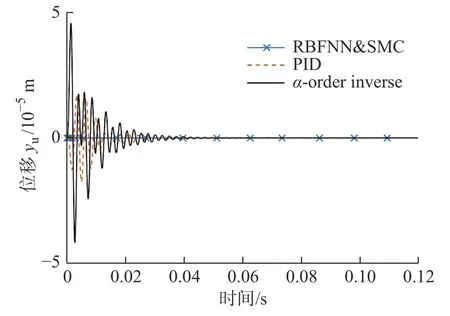
图14 4 500 r/min yu 非零初始状态响应对比Fig.14 Response comparison of yu with nonzero initial state at 4 500 r/min
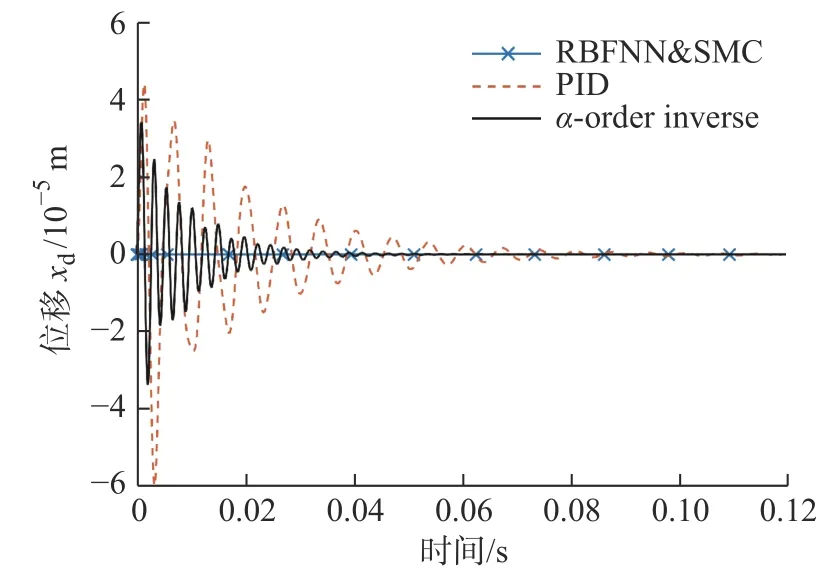
图15 4 500 r/min xd 非零初始状态响应对比Fig.15 Response comparison of xd with nonzero initial state at 4 500 r/min
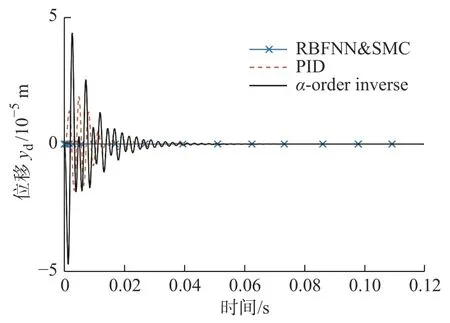
图16 4 500 r/min yd 非零初始状态响应对比Fig.16 Response comparison of yd with nonzero initial state at 4 500 r/min
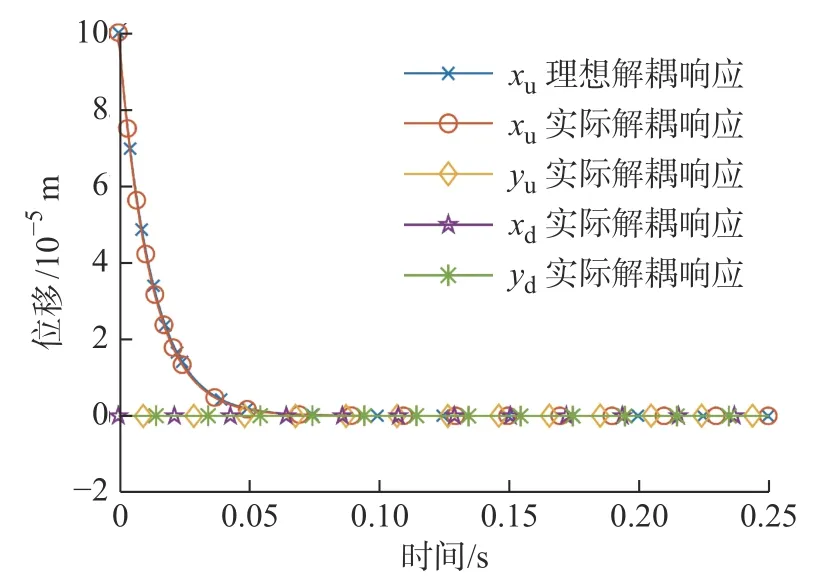
图17 本文算法下初始状态响应Fig.17 Initial state response under the proposed algorithm
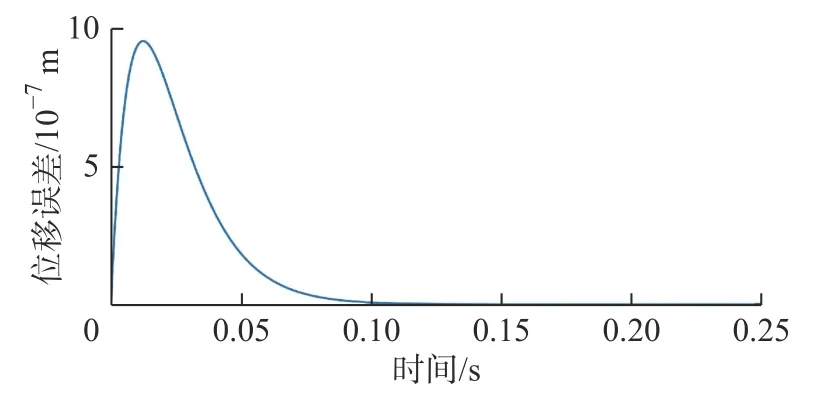
图18 本文算法受初始扰动解耦误差Fig.18 Decoupling error under the proposed algorithm with initial disturbance
3.3 非线性补偿效果对比
本文算法除具有良好的解耦性能外还补偿了非线性电磁力。在PID 控制下如果增大转子质量偏心距e0会产生非线性现象[7]。图19 为PID 控制下不同偏心距下产生的xu振动波形,当e0=1.59×10-4m时响应稳定后的振动波形为与转速同频的正弦波,而增加偏心距e0至 5×10-4m 时波形已经产生了明显的畸变。当e0=1.59×10-3m 时,在半个周期内会出现两个振动峰值。转子不平衡质量激励为单一频率激励,系统稳定后输出却出现多个频率的谐振波形,与图9 中的实验结果一致。已违背了线性系统的输入输出关系,是明显的非线性现象。经过本文算法补偿后的振动波形如图20 所示,稳定后系统的输出均为与转速同频的正弦波。依照偏心距由小到排列,本文算法产生的最大振幅仅为PID 控制振幅的0.96%、1.24%和6.83%。本文提出的算法在补偿了非线性的同时能够达到较PID 控制更好的不平衡质量振动抑制效果。
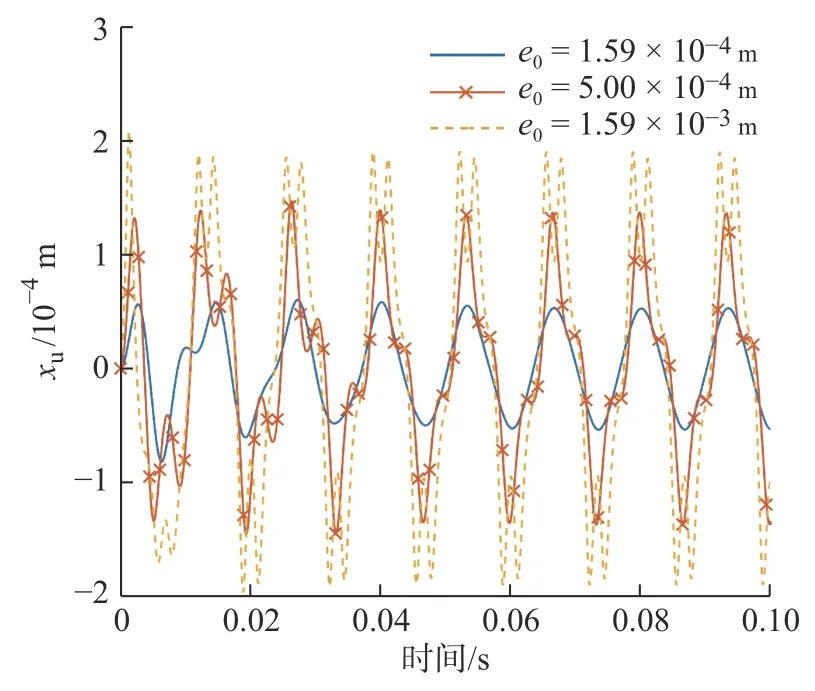
图19 4 500 r/min PID 控制下不同偏心距的xu 响应对比Fig.19 Response comparison of xu with different eccentricities under PID control at 4 500 r/min
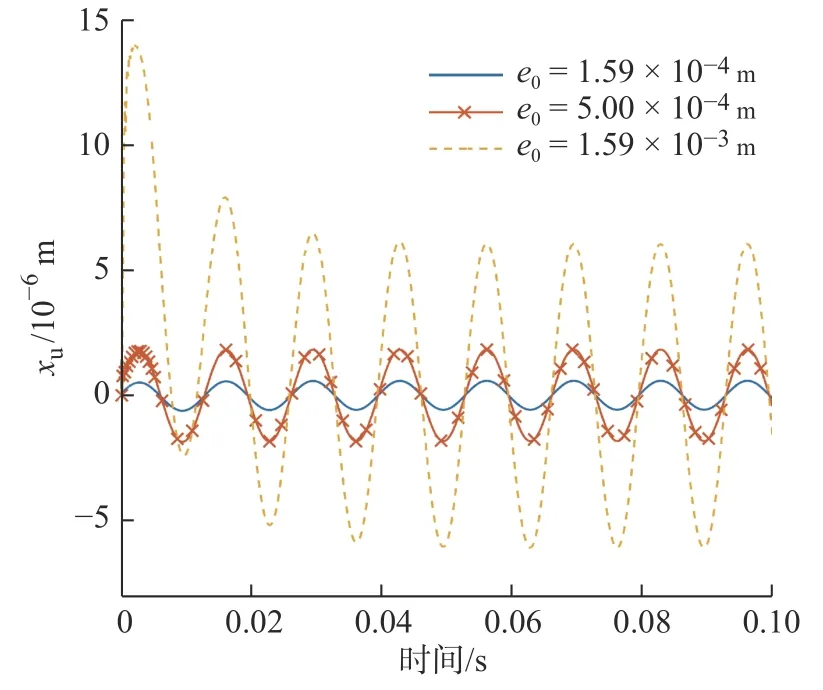
图20 4 500 r/min 本文算法下不同偏心距的xu 响应对比Fig.20 Response comparison of xu with different eccentricities under the proposed algorithm at 4 500 r/min
3.4 双曲正切函数控制效果仿真
本文采用双曲正切函数设计滑模鲁棒项,可以显著减轻传统SMC 中会出现的抖振问题。分别对采用符号函数和双曲正切函数构造滑模鲁棒项的自适应RBFNN&SMC 算法进行受初始扰动的仿真,边界条件同3.1 所述。图21 为采用符号函数sgn(s)仿真得到的电磁轴承输入电流曲线,控制电流中有大量高频成分,即使在0.07 s 系统基本稳定之后,依然需要高频的输入电流维持系统稳定于滑模面附近。图22 为采用 tan(s/δ) 得到的输入电流曲线,高频抖振显著减少,0.015 s 之后,控制电流随时间为一光滑曲线,有效改善了抖振问题。
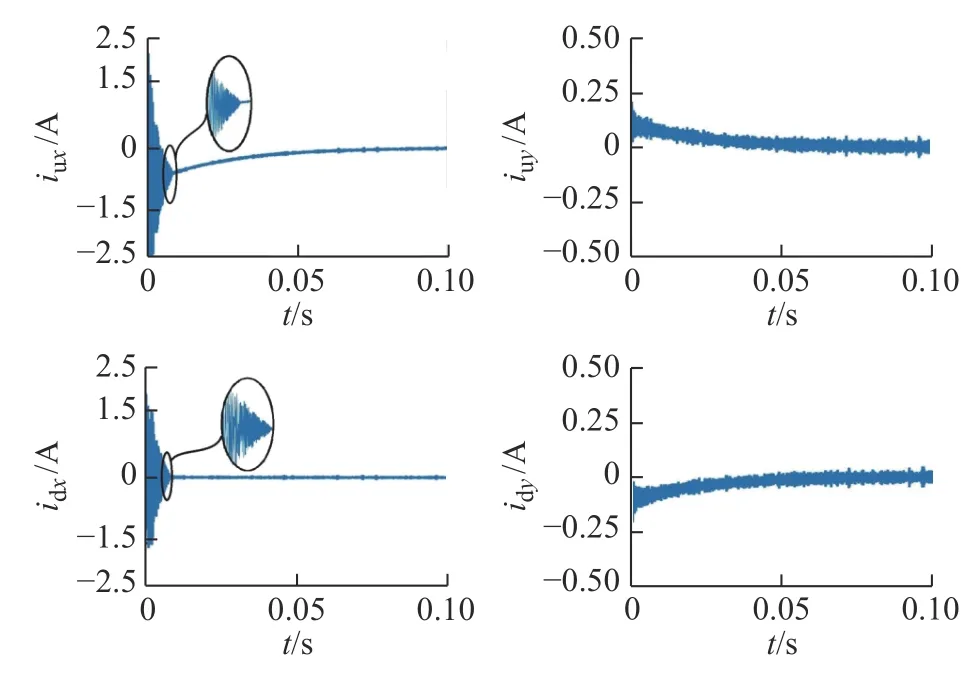
图21 采用sgn(s)的控制电流曲线Fig.21 Control current curve using sgn(s)
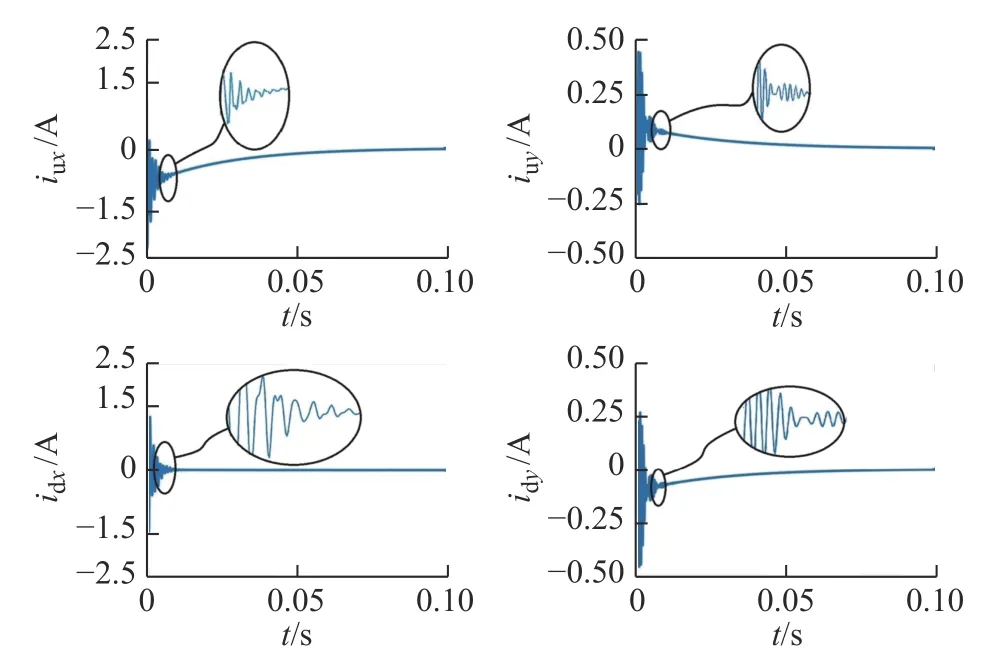
图22 采用tan(s/δ)的控制电流曲线Fig.22 Control current curve usingtan(s/δ)
4 结论
针对非线性力支承的径向四自由度磁轴承刚性转子系统提出了一种基于自适应RBFNN&SMC 的控制方法。主要获得如下成果:
1)根据Lyapunov 理论证明了自适应RBFNN&SMC 算法整体的收敛性并给出了解耦后的一阶系统动态方程。在仿真条件下系统的实际响应与期望的解耦系统响应误差在1 μm 以内。
2)本文的仿真和实验均表明系统中存在非线性因素,本文算法通过自适应RBFNN成功补偿了电磁力的非线性。在较大的偏心质量激励下,与PID 的非线性响应波形相比本文算法的响应波形为幅值较小的简谐波形,且与转速同频。
3)给出了改进SMC 算法,仿真结果表明本文算法对于不平衡质量扰动、随机扰动和滑模抖振均有良好的抑制效果。
目前本文提出的算法将转子的不平衡质量作为外部扰动来处理。对于不平衡质量激励引起较大幅度振动的情况可以增加响应的不平衡质量补偿算法,尚待研究。