仿生软体驱动器的研究综述
2023-10-16谷勇霞周建辉尹丹妮朱志豪
谷勇霞,周建辉,尹丹妮,朱志豪
(北京工商大学 人工智能学院,北京 100048)
随着现代科学技术的快速发展,机器人广泛应用于工业、商业、医疗及救援等领域。目前,已经有不同种类的机器人被研发,比如工业领域的多关节、多自由度机械手、医疗领域的智能假、救援领域的探测搜救机器人等。如今,传统机器人存在运动控制复杂、保养费用高、造价高等缺点,已经不能满足人们的生活需求,促使科研工作者将注意力转向软体机器人。哈佛大学的研究员采用多材料3D 打印技术制造了“自给自足”全软机器人[1];Pleurobot设计团队研发出一种水陆两栖类蝾螈机器人[2];Wen团队设计制造出集缠绕和吸附一体,并能够在狭窄空间环境下对物体有效抓持的章鱼手[3]。
与其他传统的采用硬质刚性材料制成的机器人设备相比,软体机器人设备是一种用智能柔软材料制作而成的机器人,因其具有柔顺性、弹性、可控性更强、人机交互安全性更高等优点[4],使得仿生软体机器人成为了研究的热点。而作为软体机器人动力结构的软体驱动器,凭借其优势,也成为了许多学者开发研究的焦点。
本文介绍了国内外软体机器人中使用软体驱动器技术的基础研究发展现状;针对软体驱动器的特性进行了归纳和分类,阐述了各种软体驱动器的基本工作原理,详细地介绍了它们在软机器人当中的应用发展的现状与领域以及在实践和应用中可能存在的问题;就软体驱动器技术的研究进展进行了总结和展望。
1 软体驱动器的研究现状
近些年,软体驱动器因其能够适应各种环境、人机交互安全性高及可控性强等优点[4],被国内外学者广泛开发研究。在气动软体驱动器领域内美国哈弗大学有着举足轻重的地位,Elmoughni 等[5]设计出一种无缝全针织气动驱动器,此驱动器在加压时能够弯曲伸展,并通过辅助手套足以抓直径3 cm,重达125 g 的物体。除了气动驱动器以外,研究者对许多新型驱动材料展开了深入的开发研究。Kim 等[6]采用了新型智能复合材料,基于形状记忆合金线和滑动机构,研制了一种新的肌腱驱动人造手指,利用SMA 的热形变,产生弯曲与扭转动作,并通过改变智能软复合材料的结构达到驱动效果。Carlos 等[7]设计了无需外部传感器就能实现恒定指尖位移的双指IPMC 微夹钳夹持器,该驱动器使用了一个用无模型方法调节的PID 控制器,实现指尖位移的零稳态误差。Christianson 等[8]提出了一种新型无框浸没式的驱动器,并以鳗鱼幼虫为灵感设计了一个由透明双晶片组成的游泳机器人。Mirvakili 等[9]提出了一种用镍钛合金丝无需第三触点制造大冲程扭转驱动器的方法。驱动器两端与装置一侧的电接触相连。通过将一个环连接到微丝的中间并扭转它,形成了扭曲结构,环的另一侧连接到负载。Valentin 等[10]研发了一种新型智能响应凝胶,并基于水凝胶的刺激敏感和自粘性用作简单的“自动”构建设备用于软机器和微流体设备。
Xie 等[11]提出一种利用硅酮管膨胀转化为肌肉收缩的新型缠绕的气动人工肌肉,通过实验验证了它是目前可穿戴机器人的最佳选择。Mao 等[12]使用SMA 设计了一种具有柔性射线的仿海星软体机器人,其本体采用了3D 打印技术构建,并且利用形状记忆合金驱动器实现了各种地形下的多步态运动。Zhang 等[13]研发了一种基于纤维材料的软体驱动器,并对人手指的实验研究设计设计了一种仿人软体手指。Yu 等[14]设计出一种新型的基于剪刀机构的真空动力人工肌肉(SMVAM)气动驱动器,此驱动器在垂直方向上的最大收缩比高达80%,能够产生约300 N 的巨大力,并且可以在叶间载荷作用下进行非垂直缩展动作。Gu 等[15]设计制造了一种钳制式横向夹紧介电弹性体驱动器,这种驱动器近年来被用来仿制面部肌肉,以达到下颌运动的目的[16]。Wang 等[17]研发了一种基于离子聚合物金属复合材料(IPMC)组成的多段柔性软机械臂,该机械臂两向运动模型用于运动控制。机械臂由6 个IPMC部件组成,每部分都能独自运行,采用了机器学习规划运动达到驱动的效果。
2 驱动器类型
软体驱动器主要是通过弯、伸、扭转或者是传统的变形方法来实现驱动。根据各种软体驱动器在其工作原理不同,可将其大致分为气动驱动器、形状记忆材料驱动器、电活性聚合物驱动器(Dielectric electro active polymer,DEAP)、刺激响应凝胶驱动器和生物混合驱动器。其中形状记忆材料驱动器主要有形状记忆合金驱动器(Shape memory alloys,SMA)和形状记忆聚合物驱动器(Shape memory polymer,SMP)、电活性聚合物驱动器主要有介电弹性体驱动器(Dielectric elastomer artificial muscles,DEA)和离子聚合物-金属复合材料(Ionic polymer metal composites,IPMC)。
2.1 气动驱动器
气动驱动器由柔性较好的弹性体封闭空腔,通过腔内外产生的压力差,改变自身的形状,进行膨胀收缩达到驱动的效果。具有驱动力大、质量轻、结构简单等特点,也是当前软体驱动器中发展最为成熟、使用最普遍的驱动器[14]。利用气动驱动的软体驱动器种类繁多,结构也各有特点。
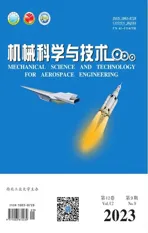
20 世纪60 年代Mckibben 设计了Mckibben型气动肌肉,由外部纤维编织网和内部橡胶管组成,气体通入橡胶管内改变内压,使之膨胀,带动驱动器产生驱动力[18],气动驱动工作原理如图1 所示[19]。
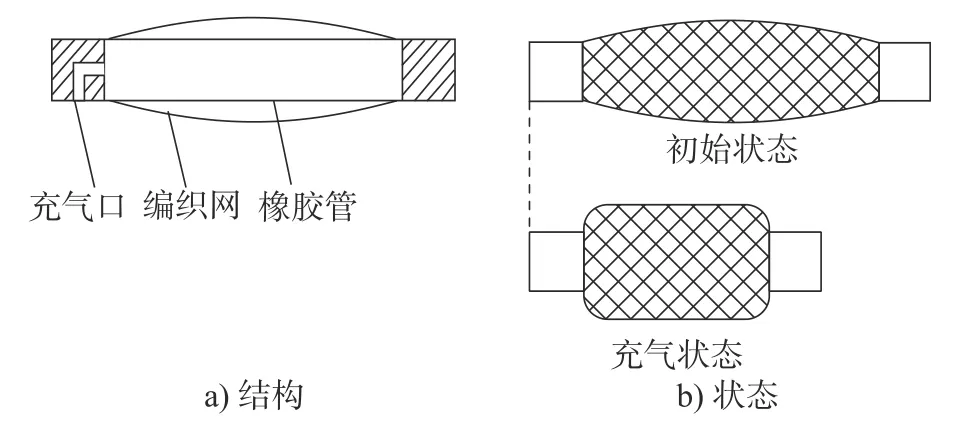
图1 气动驱动原理Fig.1 The pneumatic driving principle
Mckibben 型气动驱动器最初的目的是为驱动假肢而设计,经过研究者深入研究,开发出不同种类的气动驱动器。其中最为典型的应用为FESTO 公司设计的自然运动形式的轻型机器人,如图2a)所示。与其它类型的驱动器相比,气动驱动器具有质量轻、功率密度高、柔顺性好等特点,但其驱动压力大,存在泄露爆炸的隐患。为解决这一隐患,又研究出多种通过真空压力达到收缩效果的气动驱动器,如图2b)和图2c)所示。但这种驱动器需要外接气源等装置,使其体积较大;响应速度慢,较明显的迟滞性。因此,气动驱动器主要应用于柔顺性好,体积要求低,且拥有气源的场合,例如在工业生产中的柔性机械臂[23]以及医疗器械中的柔性假肢[24]、手术机械臂[25]、康复手[26]等。
2.2 形状记忆材料驱动器
形状记忆材料是一种具有特殊形状记忆效应的材料,当一种材料能够在一定条件下对其进行一定程度以内的变形后,在对其施加适当的外部环境条件,材料的变形就会随之消失,而又恢复到其变形前的形状。本文主要介绍SMA 和SMP 两种。
2.2.1 形状记忆合金驱动器(SMA)
形状记忆合金拥有形状记忆效应主要是由于材料的热弹性以及其内部的马氏体和奥氏体的之间的相互转变。在低温的条件下能够产生较大的形变,当受到热刺激的条件下,又能够恢复形变保持原始状态[27]。形状记忆合金自19 世纪30 年代初被美国的Ölander 发现以来[28],因其良好的特性使得形状记忆合金得到广泛研究与开发。
随着对SMA 的深入研究,实际应用的记忆合金主要有镍-钛合金(Ti-Ni、Ti-Ni-Pd 等)、金合金(Au-Cd 等)、铜合金(Cu-Zn、Cu-Zn-Al、Ag-Cd等)。其中,与其他大多数形状记忆合金相比,镍钛合金在热机械、耐疲劳特性、生物相容性等性能方面更加优良,也是当前研究开发最为成熟的形状记忆合金之一,被广泛应用于仿生机器人的设计制造当中。如软爬行机器人[29-30](图3 和图4)、仿生机器鱼[31](图5)、仿生灵巧手[32](图6)等。

图3 仿毛虫机器人[29]Fig.3 Biomimetic caterpillar robot
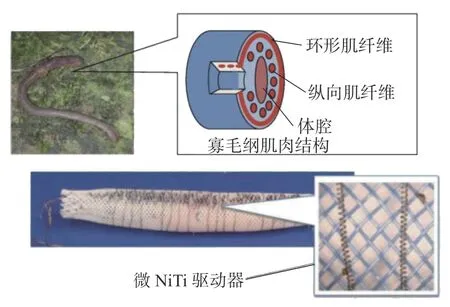
图4 仿蚯蚓驱动器[30]Fig.4 Biomimetic earthworm-like actuator
图5 SMA 驱动尾鳍[31]Fig.5 SMA driven tail fin
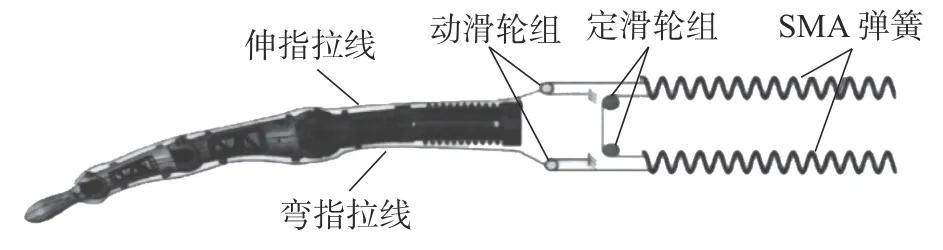
图6 仿生灵巧手[32]Fig.6 Biomimetic dexterous hand
虽然SMA 拥有生物相容性好、质量轻、驱动力大等优点,在软体机器人领域取得了许多成果,但也存在一些限制其性能和应用的缺陷。其热滞后性使得驱动的控制难,并且低循环的寿命和较高的制造成本也限制了它的应用。
2.2.2 形状记忆聚合物驱动器(SMP)
形状记忆聚合物材料是一种泛指具有初始形状的制品在一定的条件下改变它们的形状而对其进行固定后,通过各种外部环境(例如热、电、光、化学感应等)的刺激又能够使之恢复其初始形状的一种高分子材料。SMP 的材料种类有很多,根据其工作原理大致可分为:热刺激型SMP、电刺激型SMP、光刺激型SMP、化学感应型SMP 等。
与SMA 相比,多样的刺激形式使得SMP 驱动器的研究设计更加丰富,如3D 打印SMP 驱动器[33](图7)、电致型SMP 驱动器、光致型SMP 驱动器[34](图8)。虽然SMP 驱动器具有高弹性变形、成本低、结构简单等优点,但是对其驱动力小、控制精度低的缺点也使得其商业化程度。
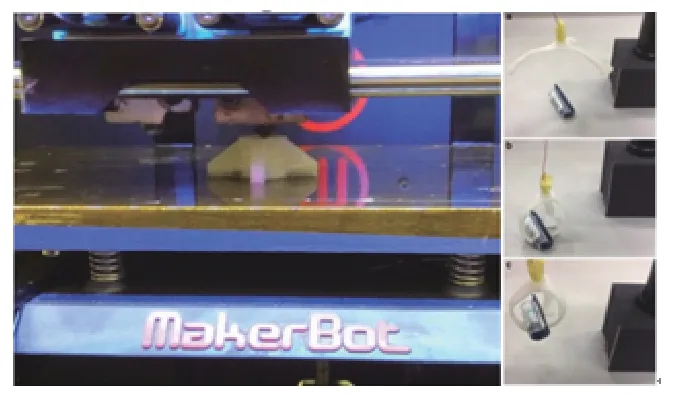
图7 3D 打印SMP 驱动器[33]Fig.7 3D printed SMP actuator
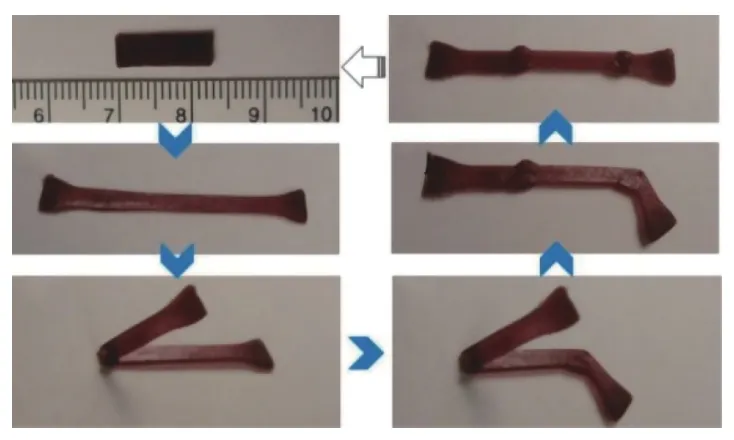
图8 光控变形SMP 驱动器[34]Fig.8 Light-controlled SMP actuator
2.3 电活性聚合物驱动器
电活性聚合物是一种智能软体材料,具有独特的电性能和机械性能,材料能够在电刺激下,产生微小变形。根据工作原理的不同,主要将其分为两种,一种是电子型EAP,它能够在直流电场作用下通过库仑力的诱导产生电致伸缩效应,同时它还可在更高的激励电场下诱导其产生位移。另一种则是离子型EAP,拥有正负两个电极,利用电解液中的离子迁移和分散的作用,使其能够在较低的电压下产生激励电场,发生弯曲变形产生偏移。下面分别对电子型EAP 的介电弹性体(DE)以及离子型EAP 的中离子聚合物-金属复合材料(IPMC)进行详细介绍。
2.3.1 介电弹性体(DE)
介电弹性体驱动器是一种快速响应的软体驱动器,可利用电场的激励产生较大的应变[27],可看作是平行板电容器,由柔性电极和柔性电极之间的介电层(弹性体膜)组成,对厚度方向施加电压之后,介电层在面积上扩张且在厚度上收缩,如图9 所示。
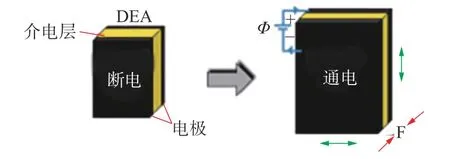
图9 介电弹性体基本原理图[35]Fig.9 Schematic diagram of the dielectric elastomer basic principle
介电弹性体材料的相关实验最早可以追溯到1881 年Röntge 的研究[36],随着材料科学及制造方法的发展进步,介电弹性体吸引的很多学者的目光,Pelrine 等[37]对其进行了早期建模。近些年来介电弹性体驱动器也取得了卓越的成果。Franke 等[38]设计了一种由一对对立的DEA 人工肌肉驱动且具有较大弯曲曲率的软体机器人(图10)。Chen等[39]设计了一个由介电弹性体驱动的扑翼微型机器人(图11),此机器人能够上升及悬停飞行,且功率密度可达600 W/kg。
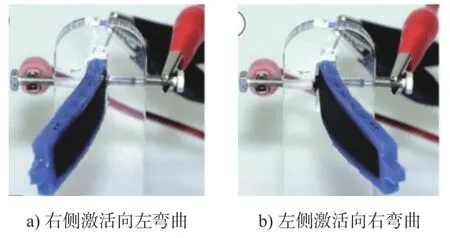
图10 较大弯曲曲率的软体机器人[38]Fig.10 Soft robot with large bending curvature

图11 由一个、两个、四个驱动器驱动的扑翼微型机器人[39]Fig.11 Flapping micro air robot driven by one,two,and four actuators
介电弹性体作为最具市场发展潜力的复合材料之一,具有较大的反应和变形能力,且其重量轻、柔性好,反馈频率和响应速度快等特点,但是其驱动电压较大,材料内部易发生介电击穿,造成材料内部的局部损伤,导致材料失效,使得成本增加。
2.3.2 离子聚合物-金属复合材料(IPMC)
离子聚合物-金属复合材料是一种新型智能软体材料,被视为机器人驱动器、人工肌肉有前途的候选材料。典型的IMPC 具有一个夹层结构,由一个离子交换膜组成,并在其表面涂有两个贵金属电极,如金或铂[40]。在对IMPC 施加一个小电压时,会产生一个电场驱动阳离子往阴极偏转,在沿厚度方向的阳离子因其密度分布不均,使得在阴极附近产生膨胀,而在阳极附近产生收缩,最终IMPC 向阳极一侧弯曲,达到驱动效果[41],如图12 所示。
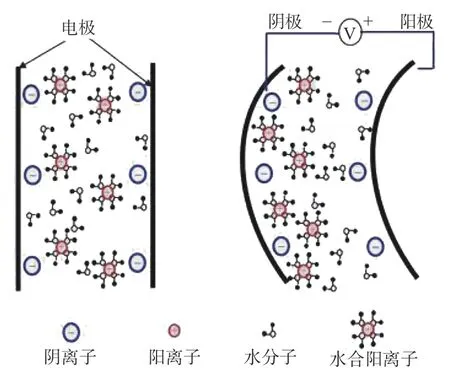
图12 IMPC 的驱动原理[41]Fig.12 The driving principle of IPMC
对于离子聚合物-金属复合材料(IMPC),离子聚合物的类型的选取是关键。通常来说,全氟化聚合物最为常见(如Nafion)。Nafion 是一种全氟硫酸离聚合物膜,具有特氟龙装的主链和被磺酸基团终止的短侧链,既能够抗衡离子(如H+、Li+、K+等),也具有疏水氟碳和亲水离子相[42]。20 世纪90 年代初,美国的Adeghipour 等[40]以及Shahinpoo 等[43]最早实现了IMPC 的应用。
随着材料科学的发展,传统的基于Nafion 的IPMC 驱动器因其在露天下耐久性差的缺点,研究者们开始寻找改善IMPC 性能的方法。例如,Guo等[44]采用了一种能够增强内部通道的亲水性锯片二氟乙烯电解质膜的简便方法,来制备更高性价的离子聚合物金属复合材料驱动器。Tang 等[45]利用了磺化程度不同的聚醚醚酮(SPEEK)膜制备了拥有更高亲水性的高性能离子聚合物-金属复合材料(IPMC)驱动器。与传统的Nafion 相比,SPEEK 最大混合应变增加,大大增加了驱动器的性能,使之成为替代Nafion 在IPMC 驱动器领域内的选择。
IPMC 作为工业应用中最有前途的驱动器之一,可用于触觉显示器、机器人夹持器、传感器等。通过近些年的研究与开发,各方面的性能一直在提高。其中基于水电解质的IPMCs 在空气中的稳定性较差,限制了其在干燥环境中的应用,而基于离子液体的IPMCs 在空气中非常稳定,响应时间却较慢。可发生弯曲变形,但由于驱动机构,弯曲振幅会出现漂移。
2.4 响应性凝胶驱动器
水凝胶具有独特的三维网状结构,当被刺激的响应凝胶随着外界条件发生变化时通常会呈现出独特的反应性和溶胀行为。自发现凝胶响应随着周围环境(如温度、PH 值、溶剂成分等)的变化情况下,将其中的外界能量转化为自身机械能,且能可逆且可不间断的 改变体积,达到自身形状的改变。因此,智能水凝胶被学者用作为人工肌肉的功能材料。
目前来说,应用最多的响应凝胶是由聚合物PAMPS 组成的电响应水凝胶,PAMPS 水凝胶受环境PH 值的影响,被广泛应用于制造软体仿生驱动器[46]。Yang 等[47]成功研制了一种新型的还原氧化石墨烯纳米复合水凝胶,与普通的PAMPS 水凝胶相比,纳米复合水凝胶因其良好的导电率增强了离子在聚合物网中的传输,表现出快速响应。Zheng等[48]制作了一种每层具有相反的热响应的双层水凝胶驱动器,对双层加热时,水由较低临界溶液温度的聚合物水凝胶(LCST)层渗出,被具有较高临界溶液温度的聚合物水凝胶(UCST)吸收,水在双层双层水凝胶内部重新分布导致其发生弯曲运动。这种运动不仅可以在水中进行,而且还可以在油和露天条件下进行,如图13 所示。
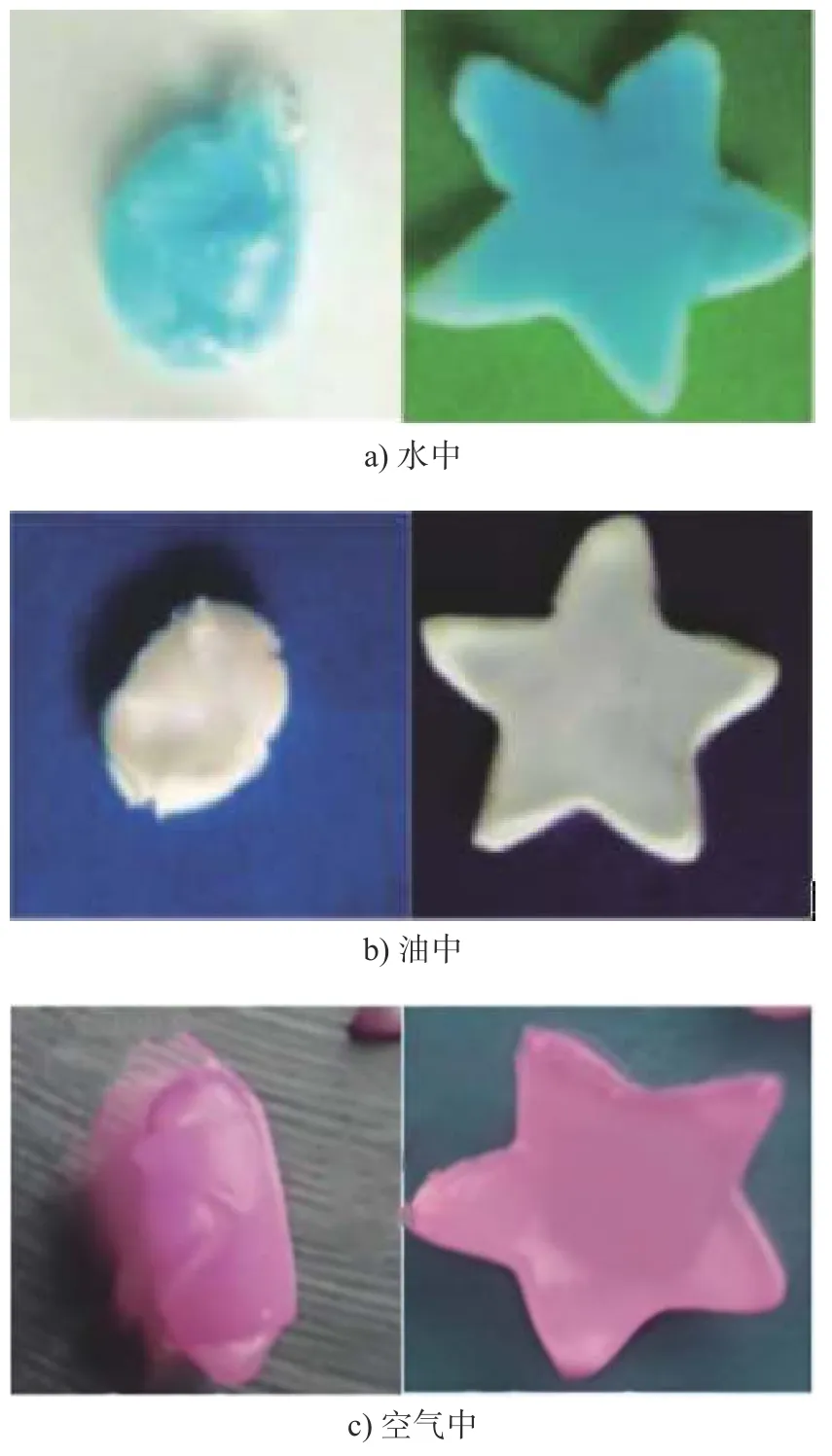
图13 3 种条件下不同温度收缩状态[48]Fig.13 Different shrinkage states at different temperatures under three conditions
智能水凝胶相对于传统凝胶拥有较好的生物相容性和良好的吸水性等优势,其固有的可降解性也是其在各个领域飞速发展的重要原因。但水凝胶的响应时间相对缓慢以及化学稳定性随时间退化也限制了其应用。
2.5 生物混合驱动器
活体肌肉细胞可以视为由肌动蛋白马达的激活驱动的微型驱动器,通过刺激兴奋收缩耦合[49]。相对于其他驱动方式来说,生物混合驱动器的研究起步较晚。最早是Zim 等[50]将心肌细胞植入凝胶,表现出的特性证明了其制造驱动器的潜力[51]。
经过近十几年的发展,研究者们对此进行深入研究,并取得了不错的进展。Felinberg 等[52]设计了心肌细胞驱动的肌肉薄膜为生物驱动材料的制备奠定了基础。Akiyama 等[53]设计了一个由昆虫肌肉组织提供动力的微型机器人。Park 等[54]通过光基因修饰心肌细胞,制造了第一个光驱动的生物混合机器人。Li 等[55]利用捕蝇器作为驱动单元设计了一种精确的按需驱动器,该驱动器能够通过智能手机实现无线控制(图14),并且可以装在平台上进行捕捉移动物体。
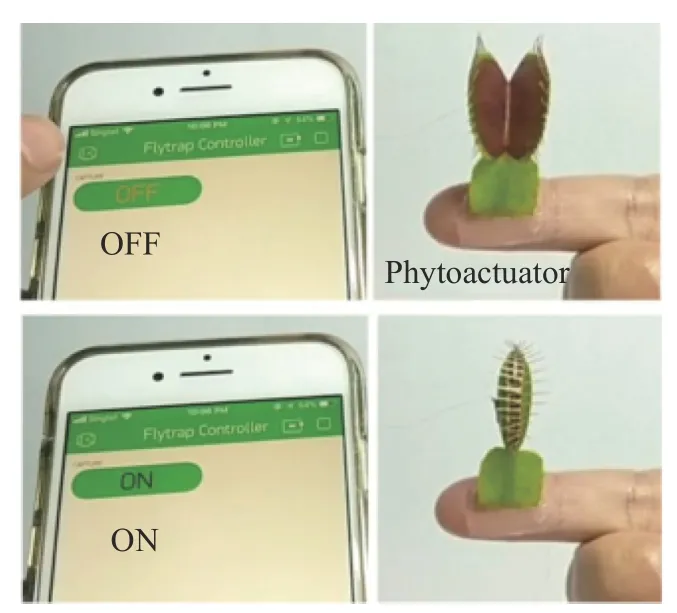
图14 手机无线控制开合[55]Fig.14 Wireless opening and closing control using a mobile phone
生物混合驱动具有良好的抗拉强度,能够产生较大的驱动力,但是对于生物混合驱动的研究目前还处于萌芽阶段,在驱动控制等方面还存在许多需要解决的问题,同时也伴随着工程伦理道德的制约。几种不同驱动方式的驱动器的优缺点及主要应用领域如表1 所示。
3 结论与展望
随着科学技术的发展,机器人占据人类生活的比重越来越大,且软体机器人的灵活性、通用性及其贴合自然的特性也使得软体机器人的重要性也随之增加。就目前而言,软体驱动器的研究仍然处于起步阶段,尚有许多关键性技术需要解决:
1)驱动器的控制系统:理想状态下的软体驱动器是可以实现无限自由度的,但由于驱动方式和驱动数量的限制,需要大量的传感器来提高其控制的精确度,在实际的应用中也无法保证控制的实时性。因此,强化软体驱动器的智能控制研究成为当前研究的新热点,利用智能控制算法有效的控制驱动器的变形量以及刚度,以适应各种条件下的环境,使驱动器更加智能化。
2)新型智能材料技术:对软体驱动器来说,功能的多样性和动作复杂性是其未来发展的趋势。因新型智能材料可以根据实际需求进行调整设计,通过改变材料的结构、基体的浓度比例等,使材料的参数、性能得到相应的改善和变化。但是目前现有的智能材料在应力、应变、成本以及使用寿命等各个环节存在技术上的缺陷,同时,其抗疲劳性能、自我修复能力以及稳定性等问题,在一定程度上限制了软体驱动器的实际应用。因此,研发出生物相容性的新型智能材料,是当前亟待解决的关键技术。
3)驱动器结构:软体驱动器的本体机构主要是利用材料的形变实现弯曲和伸缩运动,但运动形式单一且局限性较大。新型材料的多形态对提高驱动器的灵活性有较好的效果,但其对响应方式、工作环境要求较高。通过丰富驱动器的结构设计、连接的方式能够提高灵活性,实现运动的多样性,但其运动的形式和控制还要深入研究。
对于不同类型的驱动器,其发展程度也不尽相同。目前来说,各学科逐渐交叉重合,这也为解决软体驱动器的关键性问题提供了更宽阔的思路与想法。在未来,软体驱动器总体会往智能化、多功能化、微型化等方面发展,同时也将会建立一套完整的理论系统,而这不仅需要在新型智能材料方面不断取得进展,还需要软体机器人的机器智能方面取得重大突破,使之在人与软体驱动器的领域发挥着至关重要的作用。