北斗三号卫星导航系统在非洲地区控制测量的应用研究
2023-10-10赖金富史俊波欧阳晨皓
赖金富,史俊波,胡 翾,田 坤,欧阳晨皓
(1. 长江三峡勘测研究院有限公司,湖北 武汉 430079; 2. 武汉大学测绘学院,湖北 武汉 430079)
2020年7月31日,我国北斗三号全球卫星导航系统已正式开通。截至2022年12月,实际在轨提供正式服务的北斗卫星共有44颗,其中北斗二号15颗(5 GEO+7 IGSO+3 MEO),北斗三号29颗(2 GEO+3 IGSO+24 MEO)。在全球大部分地区,北斗卫星的可见数量已经超过了GPS,尤其在亚太地区,北斗可见卫星数量几乎是GPS的两倍。
北斗三号已被证明在空间结构、信号质量、广播星历精度、星载钟稳定性等方面优于北斗二号[1]。在北斗二号旧信号体制基础上,北斗三号取消了B2I信号,新增了包含B1C、B2a、B2b在内的民用信号频点,这些新增的信号频点还具备SBAS/PPP增强服务[2]。文献[3—4]的研究表明:相比北斗二号,北斗三号B1I信号信噪比高出3~4 dB/Hz。文献[5—7]通过零基线、短基线相对定位等试验证明了新信号B1C、B2a具备更优的测距精度。文献[8—12]验证了北斗三号定轨精度相比北斗二号有较大提升。文献[13]的对比试验结果表明:相比北斗二号,北斗三号卫星钟频率稳定性提升了20%~75%。文献[14—15]对北斗二号与北斗三号之间的系统间偏差进行了分析,结果表明:该偏差在单天内较为稳定,不同接收机之间的差异可达数米。
以上围绕北斗三号相对于北斗二号的增强效果研究,主要是在亚太地区展开,这是由于北斗二号只服务于亚太地区。关于北斗三号在全球范围的测量应用,2021年,文献[16]在非洲几内亚苏阿皮蒂水电站实现了北斗/GNSS自动化变形监测系统。2021年10月,由中国科学院国家授时中心牵头,在塔吉克斯坦萨雷兹湖大坝上正式建成基于北斗技术的大坝变形监测系统,该系统的建成标志着中塔国际减灾防灾合作和北斗技术“一带一路”国际应用取得实质性成效[17]。
虽然北斗三号已经具备全球服务能力,但现有研究主要集中在精密单点定位和变形监测方面,缺少北斗三号海外控制测量的应用研究。本文依托位于非洲中西部的赤道几内亚某项目,采集同时包含北斗三号和GPS卫星观测值的控制网观测数据,通过对比北斗三号和GPS的控制测量性能,验证北斗三号在海外控制测量应用中的可行性。
1 数据描述
本文选取的北斗/GNSS工程控制网包含11个控制点,其分布情况如图1所示。该控制网采用点连式的观测方案,共5个观测时段,每个时段3台接收机,采用国产的千寻星耀SE接收机,观测北斗B1I、B2I、B3I信号。

图1 11个观测点的分布情况
表1给出了各时段的观测时长和平均基线长度,各时段观测时长在45 min以上,平均长度为3.67~6.25 km,满足E级网观测要求。在各观测时段内,可以观测到北斗三号和GPS的卫星数量均在8~10颗。由此可见,当前在非洲赤道几内亚区域,可观测到的北斗三号和GPS卫星数量基本相等。

表1 闭合环观测情况
2 解算策略
本文采用国产软件CHC Geomatics Office(CGO)(V2.2.0.86)进行基线解算,并采用科傻软件(V6.1)进行控制网平差,具体流程如图2所示。

图2 北斗三号海外控制测量解算策略
(1)基线解算。将11个控制点的观测值与广播星历共同输入CGO软件,按照单基线解算模式,截止高度角设置为10°,模糊度固定采用LAMBDA算法,ration值设置为3,得到15条三维基线向量。
(2)三维无约束平差。将步骤1得到的15条基线向量输入科傻软件中,首先进行闭合差检验;然后固定BE08的三维空间直角坐标进行三维无约束平差,得到其他10个控制点的三维空间直角坐标。
(3)二维约束平差。固定BE01和BE11的平面坐标,进行二维约束平差,得到其他9个控制点的二维平面坐标。
3 结果与分析
3.1 基线解算结果
图3、表2、表3分别给出了使用北斗三号和GPS进行基线网解算的闭合环闭合差,5个闭合环长度为11.0~18.8 km。可以看出:

表2 使用北斗三号基线解算的闭合环闭合差
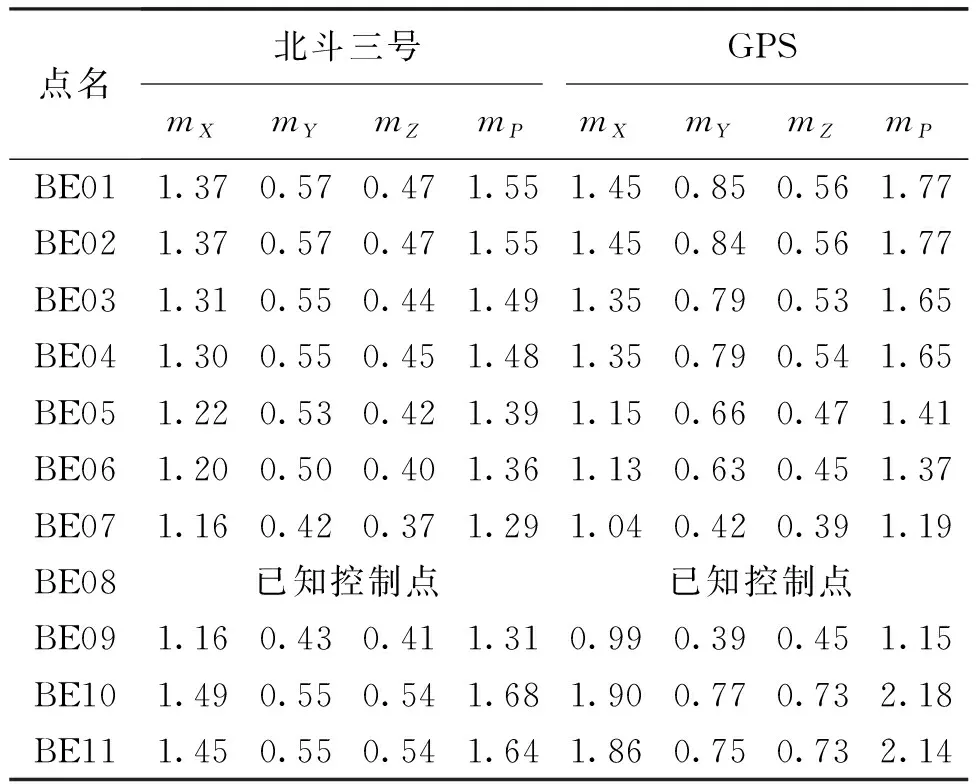
表4 使用北斗三号和GPS的三维无约束平差验后点位中误差cm

图3 北斗三号和GPS基线解算闭合环相对误差
(1)使用北斗三号进行基线解算时,5个闭合环X方向闭合差为-8.3~8.3 mm,Y方向闭合差为-2.1~3.9 mm,Z方向闭合差为-20.3~2.9 mm,总边长闭合差为1.2~22.0 mm,闭合环相对误差为(0.08~1.34)×10-6·D。
(2)使用GPS进行基线解算时,5个闭合环X方向闭合差为-21.8~23.6 mm,Y方向闭合差为-9.4~11.9 mm,Z方向闭合差为0.6~15.8 mm,总边长闭合差为7.2~30.8 mm,闭合环相对误差为0.56~2.12 ppm。
(3)除环D1外,其他4个闭合环的相对误差,北斗三号均优于GPS。
因此,可认为本控制网的基线解算,北斗三号整体精度优于GPS。
3.2 三维无约束平差结果
图4和表5分别给出了使用北斗三号和GPS的三维无约束平差结果。可以看出:
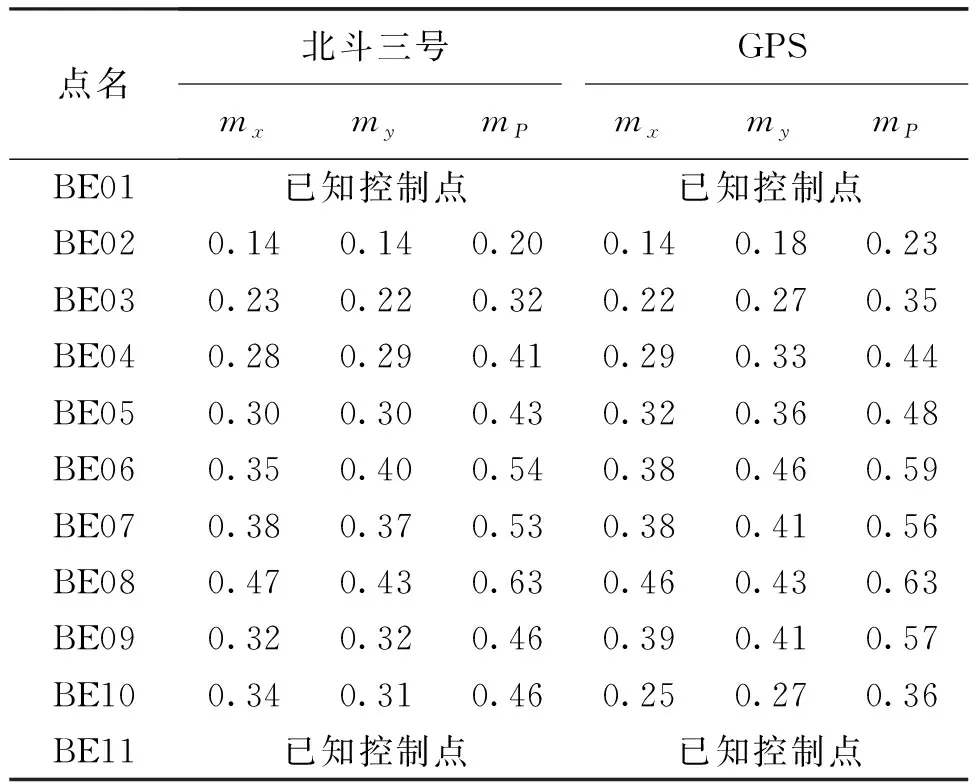
表5 使用北斗三号和GPS的二维约束平差验后点位中误差cm

图4 使用北斗三号和GPS的三维无约束平差验后点位中误差对比
(1) 使用北斗三号时,X方向验后点位中误差为1.16~1.49 cm,Y方向为0.42~0.57 cm,Z方向为0.37~0.54 cm,三维点位验后中误差为1.29~1.68 cm。
(2) 使用GPS时,X方向验后点位中误差为0.99~1.90 cm,Y方向为0.39~0.85 cm,Z方向为0.39~0.73 cm,三维点位验后中误差为1.15~2.18 cm。
(3) 无论使用北斗三号还是GPS解算,BE10均为最弱点,两种模式的验后三维点位中误差分别为1.68和2.14 cm,北斗三号优于GPS。
因此,可认为本控制网的三维无约束平差,北斗三号整体精度优于GPS。
3.3 二维约束平差结果
图5和表5分别给出了使用北斗三号和GPS的二维约束平差结果。可以看出:
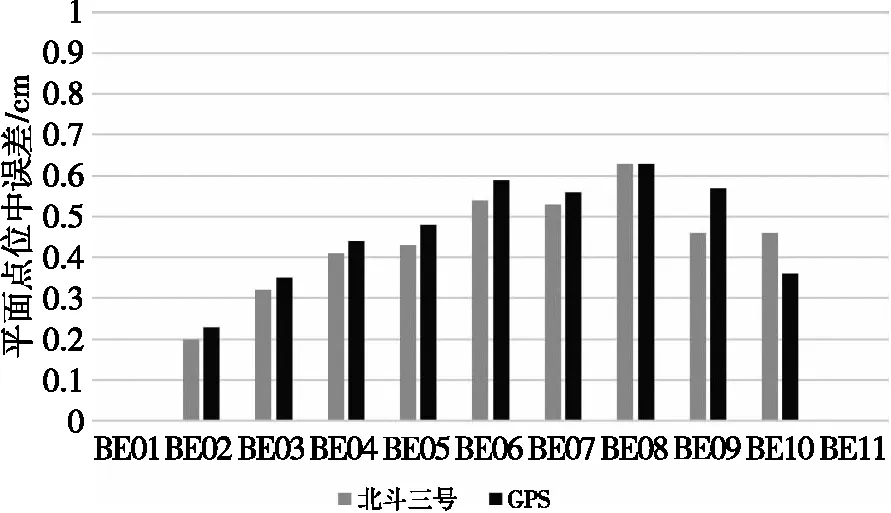
图5 使用北斗三号和GPS的二维约束平差验后点位中误差对比
(1) 使用北斗三号时,x方向验后点位中误差为0.14~0.47 cm,y方向为0.14~0.43 cm,平面验后点位中误差为0.20~0.63 cm。
(2) 使用GPS时,x方向验后点位中误差为0.14~0.46 cm,y方向为0.18~0.46 cm,平面验后点位中误差为0.23~0.63 cm。
(3) 最弱点为BE08,使用北斗三号和GPS得到的点位中误差均为0.63 cm。除BE10外,其余控制点在使用北斗三号时的平面点位中误差均优于GPS。
因此,可认为本控制网的二维约束平差,北斗三号整体精度优于GPS。
为对比两种模式下解算得到的点位绝对坐标差异,图6和表6给出了二维约束平差后两种模式的平面坐标差异。可以看出:各点位x方向坐标差异为-0.30~0.96 cm,y方向为-1.09~0.43 cm。以上结果表明:分别使用北斗三号和GPS在非洲赤道几内亚进行控制测量作业,得到的控制点平面坐标差异小于1.09 cm,北斗三号在海外具备与GPS相似的性能。
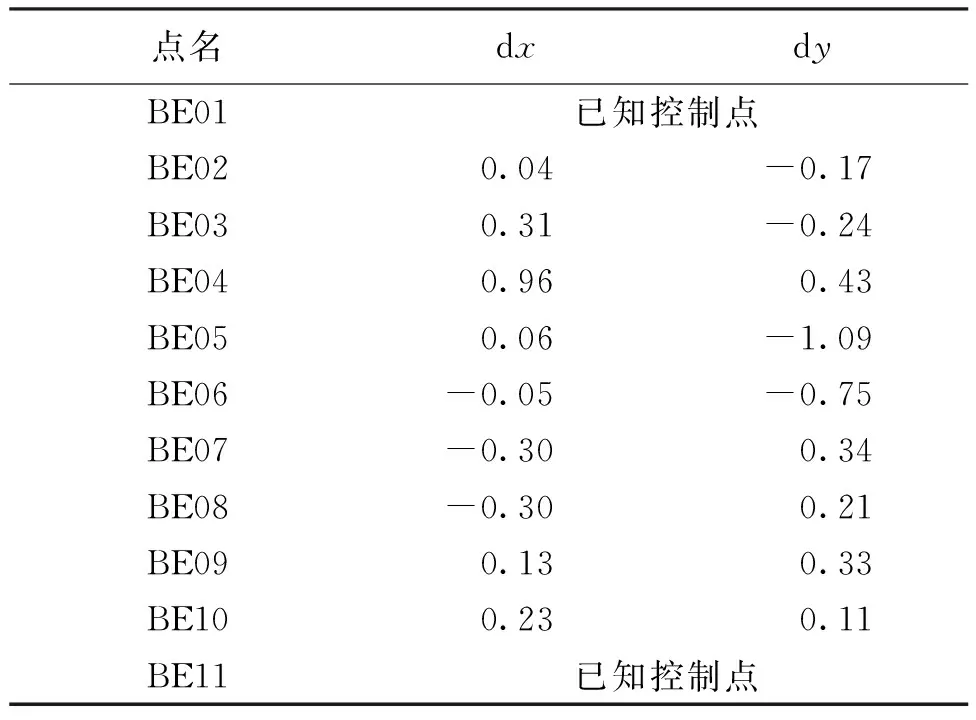
表6 使用北斗三号和GPS的二维约束平差后平面坐标差异cm

图6 使用北斗三号和GPS的二维约束平差后平面坐标差异对比
4 结 论
通过2021年4月在非洲赤道几内亚使用国产接收机采集的E级北斗/GNSS控制网观测数据,本文依次使用国产CGO和科傻软件,分别对北斗三号的基线解算、三维无约束平差、二维约束平差进行了计算分析,并和GPS相关结果进行了对比,得到了以下结论:
(1)使用北斗三号和GPS进行基线解算时,闭合环相对误差分别为(0.08~1.34)×10-6·D和(0.56~2.12)×10-6·D,北斗三号的基线解算整体精度优于GPS。
(2)使用北斗三号和GPS进行三维无约束平差时,最弱点点位中误差分别为1.68和2.14 cm,北斗三号的三维无约束平差优于GPS。
(3)使用北斗三号和GPS进行二维约束平差时,最弱点点位中误差均为0.63 cm,两种模式下得到的E级网控制点平面坐标差异不超过1.09 cm。
综合而言,本文首次验证了使用北斗三号在非洲地区进行控制测量时,具备与GPS相当的性能。相关结论为北斗三号控制测量应用走向全球提供了参考。
