紫外成像光谱仪结构组件优化设计
2023-10-08杨剑宇杨萱郑建华
杨剑宇,杨萱,郑建华
(1 中国科学院国家空间科学中心,北京 100190)
(2 复杂航天系统综合电子与信息技术重点实验室,北京 100190)
(3 中国科学院大学,北京 100049)
0 引言
大气环境污染对民众健康带来严重威胁,因此对大气环境的监测至关重要[1-2]。20 世纪后半叶以来,国际上已有多款星载紫外成像光谱仪发射入轨,如OMI[3]、GOME-1[4-5]、GOME-2[4]、SCIAMACHY[6]和OMPS[7-8]等设备。这些仪器的设计初衷主要是为了探测和监测痕量气体以及吸收性气溶胶,并对气溶胶指数进行反演,进而实现对沙尘、雾霾等吸收性气溶胶的大气环境监测。然而,随着技术的进步和需求的升级,紫外成像光谱仪需要在更高的空间分辨率下工作,并满足更严格的结构要求。传统的设计方法通常是用三维实体模型建立结构分析的有限元模型,然后优化结构的机械性能,用优化后的结构计算设备的光学性能,若不满足光学指标则更改结构重新设计,这种仅以机械性能为目标约束的优化设计往往会导致大量的设计冗余,很难实现系统的最优化[9-10]。近年来为提高设计优化效果,光机集成优化设计开始被越来越多地应用,JIANG P 等[11]采用光机集成优化,对一种S 型挠性支撑的空间望远镜非球面轻质SIC 镜进行了设计;WANG K J 等[12]在质量和基频的约束下,对天基大口径镜柔性支撑结构进行了光机集成优化设计;何啸[13]对一种大口径空间遥感器主结构及主镜和次镜进行了光机集成的轻量化设计。在紫外成像光谱仪领域,薛闯[14]通过有限元分析方法,对一种紫外成像光谱仪的光学元件支撑结构及主支撑框架进行了光机集成优化设计;武耀等[15]运用光机集成分析方法,对紫外成像光谱仪的镜头进行了设计。虽然这些文献都进行了光机集成优化设计,但并未对相关设计参数进行灵敏度分析以进一步提升设计和优化的效率。
针对星载条件紧凑和轻量化要求,对一种星载紫外成像光谱仪结构进行了研究。该结构设备可通过推扫方式提供大气散射光谱数据和空间分布信息,用于监测大气环境。通过变密度拓扑优化方法并结合第二代非支配排序遗传算法,对结构进行参数化建模、尺寸灵敏度分析和优化设计,减少其重量,同时确保优化后的结构满足光学系统要求。并对优化设计后的结构进行了静、热分析、杂散光分析、动力学分析和力学试验。
1 光谱仪结构组件设计
1.1 结构设计需求
紫外成像光谱仪工作在340~390 nm 波段,对光谱仪结构组件的装调精度、温度与力学性能的稳定性均有较高要求。所以,为保证其设计的稳定性和多次装调的技术要求,需要把光谱仪的结构分成若干个组件,尽可能运用模块化处理方法,并将每一模块独立装配,待测试完以后再进行整体的装配调试。
为使仪器的设计更为合理紧凑,在光学设计时,分别将准直系统设计成反射系统,将光谱成像系统设计成透射系统,而光谱仪结构组件的分光则由平面光栅来实现。光谱仪结构组件镜片组成如图1 所示,其中分光及成像系统主要组成部分为准直镜、反射镜、光栅和成像物镜组。在成像过程中经过超广角望远镜的入射光线通过平面反射镜1 和2 后进入到对应的准直镜,准直后的光线再通过准直系统的反射镜3,即可将光线反射到系统的光栅上,分光后通过成像物镜组在CCD 上进行成像。
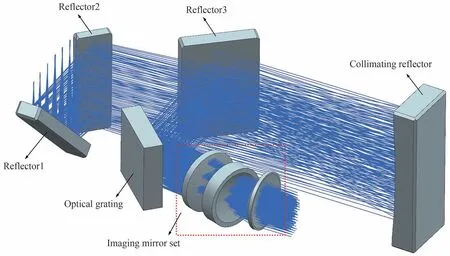
图1 光谱仪镜片组成Fig.1 Lens composition of spectrometer
1.2 结构初步设计方案
光谱仪结构组件是光谱仪设备中重要的组成部分,其力学的性能、尺寸的稳定性以及变形程度,将直接对光路中每个透镜的相对位置和成像质量产生影响。根据光学和结构设计需求,初步结构设计方案如图2所示。其中将反射镜1~3 设计为一个主模块,并通过4 个支脚固定在设备底板上,准直反射镜、光栅各自一个模块,通过螺钉固定在主模块上,成像物镜组分为镜架和镜筒两个模块,其中镜架部分也设计有2 个支脚固定在设备底板上。结构材料选用铝合金7075。

图2 光谱仪结构初步设计方案Fig.2 Preliminary design scheme of spectrometer structure
反射镜和平面光栅在安装时根据其结构特征,选择了背部点胶并辅以压条的方式进行安装固定。为减小固定压条对反射镜光学表面面型的影响,在压条与反射镜之间采取增加柔性垫片的方法,并预留0.1 mm用来放置垫片的间隙。为了消除温度引发的干扰,需要适当减少反射镜与框架接触。在对反射镜各边进行固定时,选择两点定位的方法来尽可能地减小反射镜与框架之间的接触面积。另外对接触面进行精细加工以确保反射镜和框架之间的接触面平整、光滑,从而进一步提高位置精度。图3 为对应的安装结构图。反射镜组装结束后,在主框架通过三点接触方法固定,这样可降低面型受到的影响。对调整垫片的尺寸进行适当精修,可控制镜片的安装精度符合标准。

图3 反射镜的安装与固定Fig.3 Installation and fixation of reflector
1.3 结构的拓扑优化
由于光谱仪结构组件初步设计方案中,结构的尺寸较为保守,所以在确保整体结构具有足够刚度的基础上,对其主要构件进行拓扑优化和轻量化处理。由于光谱仪的主模块、成像物镜镜架两个模块为主要承力结构,且构型相对复杂,另外准直反射镜模块较大且为悬臂结构并与主模块连接,所以文中主要对这三个部分(即图2 中青色部分)进行优化设计。
在拓扑优化中,尽管结构的柔度与其最大的节点位移并不直接构成正比例函数,但众多的数据验证算例显示,在迭代过程中,伴随着整体弹性的逐渐降低,其柔性也随之减少,常对应于结构中最大的节点位移,具有不容忽视的正向作用[16-17]。拓扑优化模型为
式中,C为结构的柔度;F为外载荷组成的矩阵;U为整体节点组成的位移矩阵。由结构的平衡方程得到
K为整体结构的刚度矩阵;n为单元数量;ρm为单元相对体积密度;Vm为单元i的体积;Vˉ为体积约束;ρlv是ρm的下限值,一般取值为1×10-3。
在精密光学载荷拓扑优化过程中,会产生由疏密变化导致的网格依赖现象以及棋盘格现象,这些现象均会对优化迭代的过程稳定性以及计算的结果可靠性直接产生影响,所以需要灵敏度与密度的过滤技术[16-17]。
在拓扑优化中,刚度矩阵K通常是ρm的函数,由式(1)和(2)可知,柔度C隐含相对体积密度ρm,用链式求导法则计算则有
由于刚度矩阵K的对称性,将式(2)代入式(5)可得
由式(2)对ρm求导,整理可得
将式(7)代入式(6),引入伴随方法[16],可得
把SIMP 的插值模型直接代入到式(8)中,最终可得灵敏度的表达式为
式中,p是惩罚因子,Um是单元的节点位移矩阵,K*m是用来表达单元刚度的矩阵。
主模块及准直反射镜模块通过80 次的优化迭代,成像物镜镜架通过50 次的优化迭代之后,可以看到目标函数趋于收敛。材料分布如图4 和5 所示。图6 为拓扑优化迭代收敛曲线。确定出材料分布结果后,对于那些密度较小的区域,对应的柔度的灵敏度处于较低水平。与此同时密度较大的区域通常会被保留,因为它们在结构性能上通常更有贡献。
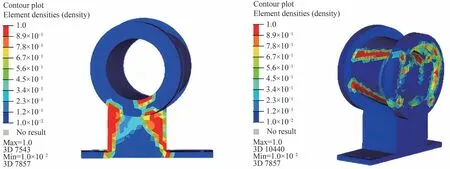
图5 成像物镜镜架拓扑优化结果Fig.5 Topology optimization results of imaging objective lens frame

图6 拓扑优化迭代收敛曲线Fig.6 Iterative convergence curve of topology optimization
1.4 结构灵敏度分析及参数优化设计
在结构的拓扑优化中,常运用加强筋的布置以及挖孔来除掉冗余的质量,因此在得到的优化结果中,经常会有一些局部特征不能满足设计要求[18]。因此有必要在拓扑优化的结构基础上,对其尺寸参数进行详细优化。需要优化的几何参数如图7 和8 所示。

图8 成像物镜镜架几何参数Fig.8 Geometric parameters of imaging objective lens frame
光机结构在尺寸参数的优化设计时参数较多,如果都作为优化模型的设计变量,会让优化过程繁琐冗长,甚至不堪重负;另外机械性能与光学性能指标中,有时需要多个性能指标都达到最优的结果[19-21]。为此需要找到其中的关键参数。
采用拉丁超立方体随机抽样方法,在此基础上,建立了多元线性回归模型。多元线性回归方程的系数反映了每个测试因素对机械性能的贡献大小,也代表了尺寸参数对性能响应的敏感性。根据样品点数据分析后所得到的试验结果,分别构建每个因子和各响应之间的线性回归方程,其中每一项系数值即为对应的贡献值大小。图9 显示了归一化后的贡献百分比。

图9 参数对各响应函数的贡献Fig.9 Contribution of parameters to each response function
从灵敏度分析结果可知,相较于其它结构参数,参数L4、L9、L12、L13、L15、L16、L17和L18对综合响应有更重要的贡献。因此,这些结构参数将被视为优化的关键参数。优化模型的数学描述为
其中,RMSplus-Z为各镜面面形沿重力坐标轴方向时的面形质量和;RMSn-z表示8 个镜片分别沿着Z轴重力方向时反射镜面形质量RMS 值;in代表对应的权重值,考虑到准直反射镜及光栅镜面变形的重要性,将这两个镜片权值i均设置为0.2,其余6 个镜片权值为0.1;δ表示RMSplus-Z值的上限,取λ/30;Ln_low和Ln_up分别为各尺寸的上下界限;-f为最小一阶固有频率,取100 Hz。
目前,多目标的优化解决方法中已有了相对成熟可靠的算法,如多岛遗传算法、邻域培植多目标遗传算法以及非支配排序遗传算法等[22-24],采用第二代非支配排序的遗传算法NSGA-Ⅱ求解尺寸参数优化模型。经过86 次迭代后,模型收敛,迭代曲线如图10 所示。尺寸参数的优化结果见表1。表2 总结了优化前后的其他性能,其中虽然一阶频率有所下降,但依然大于100 Hz,同时结构的轻量化率达到58.7%,镜面面形质量也得到了提升。

表1 参数优化前后的尺寸参数Table 1 Size parameters before and after parameter optimization

表2 光谱仪结构优化前后的性能对比Table 2 Performance comparison of spectrometer before and after structure optimization

图10 设计变量迭代曲线Fig.10 Iterative curve of design variables
经过优化,同时考虑到加工工艺设计的主模块及准直反射镜模块和成像物镜镜架结构如图11 所示。最终光谱仪的结构如图12 所示。

图11 优化后的光谱仪主要结构Fig.11 Optimized main structure of the spectrometer
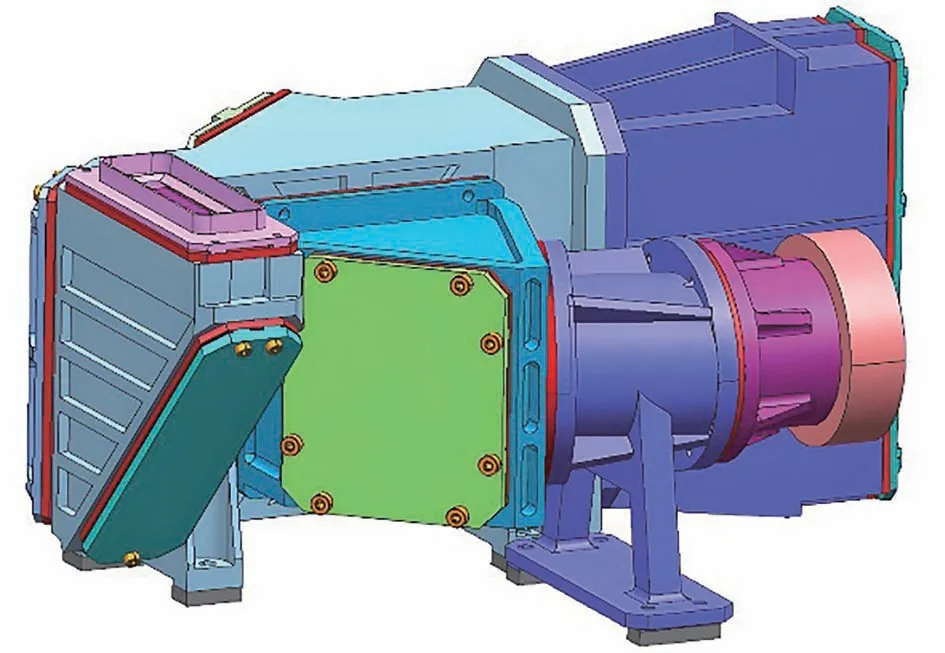
图12 紫外成像光谱仪结构Fig.12 Structure of ultraviolet imaging spectrometer
2 性能分析与试验验证
对优化设计之后的紫外成像光谱仪结构组件进行静、动力学分析,热分析和杂散光分析,并进行力学环境试验,以便对结构性能进行检验。
2.1 静力学分析
首先对光谱仪结构组件进行静力学分析。施加的位移约束是限制光谱仪与设备底板上安装孔的6 个方向自由度。对结构施加1g(g为重力加速度)的重力载荷,方向为Z轴,竖直向下。将每个镜片的结果拟合成泽尼克多项式,带入光学设计软件中,计算光学系统成像质量的变化。
给出受重力影响最大的准直反射镜的变形云图,如图13所示。分析准直反射镜的变形结果可发现,反射镜两对角的变化基本一致,由此可判断出在重力因素影响下,准直镜部分出现轻微扭曲,变形量不超过9.1 μm。

图13 准直反射镜受重力影响的变形量Fig.13 Deformation of collimating mirror affected by gravity
在分析重力场的影响时,主要研究其对整个系统性能变化的情况,在分析过程中带入各镜片表面的变形量,然后对比分析系统的总体性能,对所得结果进行处理后如图14 所示。分析可发现在重力影响下系统的性能有所下降,不过光学系统弥散斑变化最大不超过9 μm,满足了小于25 μm 的要求,该弥散斑的变化在合理范围内。

图14 受重力的光学系统点列图Fig.14 Spot diagram of optical system subjected to gravity
2.2 光机系统的热计算
对光机系统中的热变形所导致的各项性能的衰减过程进行仿真即为热计算。主要考察光谱仪结构组件在10 ℃和30 ℃时的两个温度工况,分析系统的成像质量。图15 和16 分别为准直反射镜和光栅表面的变形云图。图17 和18 为对应工况的光学系统点列图。

图15 准直反射镜的面型变化Fig.15 Change of the surface type of collimating mirror

图16 光栅面型变化Fig.16 Change of the surface type of grating surface type

图17 10 ℃时光学系统点列图Fig.17 Spot diagram of optical system at 10 ℃

图18 30 ℃时光学系统点列图Fig.18 Spot diagram of optical system at 30 ℃
将所有变形加载到对应镜片表面后,对比分析成像质量的改变情况。在两个温度工况下,光学性能指标都有不同程度的降低,不过与20 ℃常温时相比,光学系统弥散斑变化最大不超过18 μm,满足了小于25 μm 的要求。同时两个工况下6.2 lp/mm 传递函数都大于0.6,可以满足光学系统的要求。对比分析发现在各方面影响因素中,准直反射镜的面型对系统性能的影响最显著,因此需要确保其温度稳定性达到较高水平。
2.3 杂散光分析及采取措施
在光栅前设置矩形光栏,以便对杂散光进行抑制;为了减少成像物镜内部的杂光影响,可以在内部增加消杂光光栏,如图19 所示;为了进一步减少杂光,将镜片边缘涂黑漆,可以有效防止光线的反射,另外在内部也进行了发黑处理。

图19 成像物镜内消杂光光栏Fig.19 Impurity elimination diaphragm in imaging objective lens
分析光学系统杂散光相关情况,接着对采集的焦面照度数据处理后取对数,所得结果如图20,根据结果可知杂散光的亮度远低于正常光,系统的杂散光程度比设计要求约低两个数量级,由此可反映出杂散光满足要求,不会对系统产生明显影响。
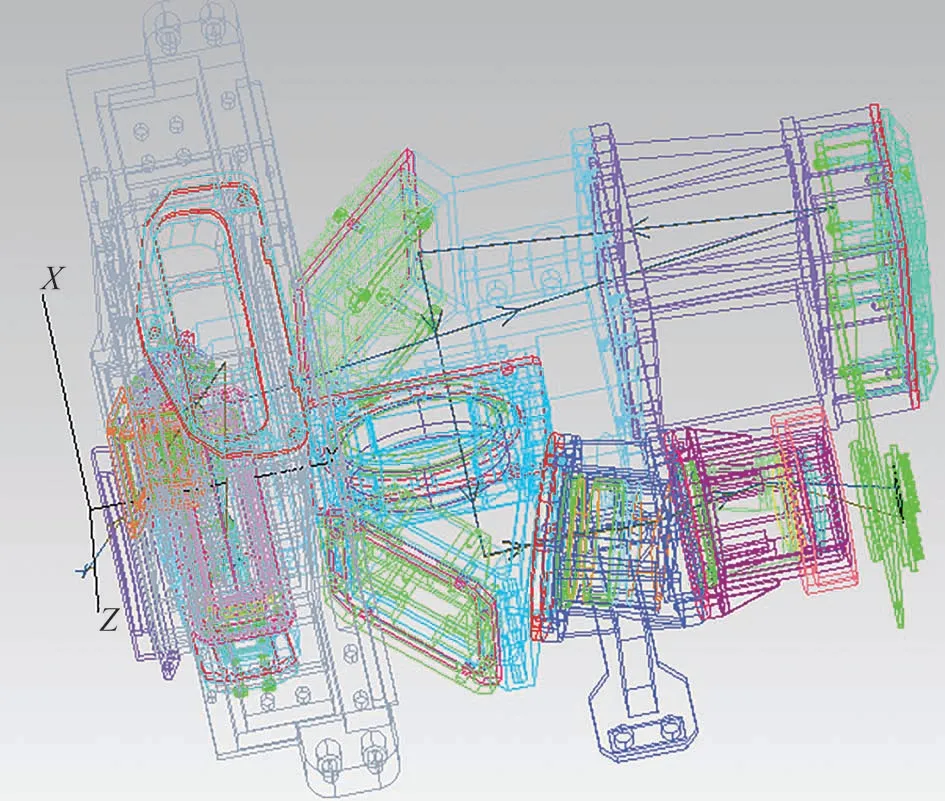
图20 杂散光光线Fig.20 Stray light ray diagram
2.4 动力学分析
在仪器结构设计过程中,计算在随机载荷作用下设备的结构响应,是结构设计时的重要任务[25-26]。通过有限元软件对光谱仪结构组件进行随机振动仿真分析。随机振动试验条件如表3 所示。表4 为光谱仪结构组件随机振动响应结果。表中g表示重力加速度。

表3 随机振动试验条件Table 3 Random vibration test conditions

表4 光谱仪结构组件随机振动响应结果Table 4 Random vibration response results of spectrometer structure components
通过随机振动响应分析得出,采样点最大响应对应的方向为Z方向,放大倍数为3.8,关注点响应较小,结构总体力学性能较好。
2.5 力学试验验证
随机振动的力学试验结果表明:光谱仪结构组件中,在X轴方向上最大加速度的响应放大倍数是3.2,与分析结果的误差为4.4%;在Y轴方向上最大加速度的响应放大倍数是3.05,与分析结果的误差为4.72%;在Z轴方向上最大加速度的响应放大倍数是3.6,与分析结果误差为4.5%。力学性能测试后,采用标准的谱线灯来测试系统的光谱特性,并与力学性能测试前的结果进行对比,测试的光谱特性量化结果最大变化为0.4 个像素。试验结果表明光谱仪结构组件满足力学环境试验要求,结构稳定性较好。图21 为随机振动试验测点的响应曲线。

图21 随机振动试验测点曲线Fig.21 Measuring point curve of random vibration test
3 光谱仪结构组件的光学测试及装调
光谱仪结构组件光学性能测试的内容主要有:辐亮度定标、辐照度定标、波长定标、杂散光测试等。
3.1 光谱仪光学测试
3.1.1 辐亮度定标
辐亮度定标过程可选择的方法主要包括漫反射板法和积分求法,二者各有一定适用范围。其中漫反射板法主要是基于标准灯和标准漫反射板形成特定辐亮度的光源进行定标,积分求法定标时,设置仪器保持对地工作模式,入射光路中放入相应的漫反射板,其和光源间距为50 cm,标准卤钨灯释放出的光线垂直照射到反射板上,多次检测实现定标目的。
3.1.2 辐照度定标
仪器辐照度定标过程中应用准直光源对漫反射板进行照射,多次检测而实现定标目的。基于标准卤钨灯定标后,对相关数据进行分析,转换处理就可以确定出仪器不同视场方向的辐照度响应度。
3.1.3 漫反射板角响应特性测量
从角响应特性方面分析可知,漫反射板测试过程中需要符合的条件为,光谱范围广,且对应的反射角度大。对比分析各种反射角条件下的响应特性,然后基于响应结果选择适宜的漫反射板,在安装后通过辐照度准直光源对板进行照射,改变入射角参数后分析其角响应特性变化情况。确定出各入射角条件下的CCD像元变化特性。
3.1.4 波长定标
波长定标过程中应用了空心阴极灯和汞灯,在定标过程中先在光路中设置对应的反射板,这两种光源分别照射后确定出CCD 探测器对二者的响应,对采集的数据进行拟合后就可以实现波长定标的目的。为提高波长定标效果,选择了Pt、Cr 等对应的空心阴极灯。
3.1.5 总视场及空间分辨率
仪器总视场定标时选择的光源为氙灯紫外平行光管,对应的原理如下,在不同的入射角度下控制平行光照射待定标载荷,通过回归分析方法对行像元序号-响应信号数据进行拟合,从而确定出视场范围的边界,可以实现视场定标目的。而空间分辨率在描述时应用到空间响应函数,对应的光源为平行光。对本仪器而言,在空间分辨率定标时应用高精度转台,测量频次为0.01°一次,对所得结果进行处理就可以确定出转动角度-响应信号相关性曲线,获得与此相关的空间响应函数。
3.1.6 杂散光测量
采用氙灯作光源,在对应的口径处设置滤光片,根据截止特性分析,得到仪器对各波段辐射的响应变化情况,对采集的数据进行处理,可以确定出杂散光来源和影响水平。
3.2 光谱仪结构组件装调
光谱仪结构组件在安装过程中通过底部的支脚与底板保持固定连接。对垂直方向安装精度进行调整时,可精修每个支脚下的钛合金调整垫,水平方向安装精度通过机箱底板上的定位面进行控制。这样可以尽量提高装配时的安装精度。
在安装过程中通过结构基准来控制光谱仪结构组件位置精度,利用三坐标测量仪确定出光谱仪结构组件安装时所需要的结构基准位置。在安装过程中成像物镜先独立装调,结束后通过定位面确保其和光栅的位置满足要求。探测器和光栅框上设置对应的安装结构,可以分别和装调工装相连,在调试过程中根据检测的像质对光栅和探测器的位置进行适当调节,控制成像质量满足要求。在底板上根据要求安装各部分后,在此基础上照射窄线宽单色光,在焦面处设置CCD 工装,检测分析确定出各波长的光谱分辨率,基于所得结果对光栅位置进行适当调节,一直到分辨率等光学参数都达到标准。准直系统的主要组成单元包括三个折转镜和一个凹面镜,前者主要是依据机械基准安装,结束后需要对出射角度进行检测,确保满足要求。成像系统安装后需要基于结构位置关系调试。由于设计时有较大的公差值,所以可采用直装方式并辅以定心仪检测即可满足该部分的安装要求。装调流程如图22 所示。

图22 光谱仪装调流程Fig.22 Flow chart of spectrometer setup
4 结论
针对紫外成像光谱仪展开研究,设计了一种紫外成像光谱仪的结构组件。对初始结构进行了拓扑优化设计,并对拓扑优化后的结构重要尺寸参数进行了优化,经过拓扑和参数化优化后,结构重量降低的同时光学指标也有所提高。光谱仪结构组件在1g重力、10 ℃和30 ℃两个温度工况及系统杂散光分析时,光学系统均满足要求。动力学分析结果与试验结果最大误差为4.72%。结果证明了本文提出的紫外成像光谱仪结构组件设计方法的可行性以及结构性能的可靠性。为其他紫外成像光谱仪的结构设计提供了有益的参考和启示。
