面向空间激光干涉的多通道相位测量系统
2023-10-07张强涛刘河山罗子人2
张强涛,刘河山,罗子人2,*
(1.中国科学院国家空间科学中心, 北京 100190;2.国科大杭州高等研究院, 杭州 310024;3.中国科学院大学, 北京 100049;4.中国科学院力学研究所, 北京 100190)
1 引 言
空间引力波探测激光干涉光路较为复杂[8-11],涉及三路干涉仪12 通道差分干涉信号的相位读出[2,12]。LISA 相位计已有多年的研究积累,具备完备的高精度多通道测量系统,能够满足空间引力波探测中多路干涉信号的读出需求;然而,太极计划对相位计的研究目前集中于单路干涉仪的4 通道相位测量,尚无法满足太极计划及其地基干涉实验的需求[13]。为减少通道间的采样抖动,四通道相位计一般采用单片四通道模数转换器(Analog-Digital Convertor, ADC)的设计方案。若需扩充至更多通道,需采用多片ADC 芯片,但不同ADC 之间存在差异,会使芯片间的通道引入额外的噪声。此外,针对相位计的噪声测定,大多数研究仅考虑理想情况下的极限水平,这种情况下的测试信号的信噪比较高、幅值较大、频率较低、频率稳定性较好。但在太极计划中,激光经过300 万公里后与激光器发出的激光进行干涉,远距离传输和轨道运动会导致干涉信号出现峰峰值低、信噪比低、频率波动较大等问题[14]。衡量相位计在实际工况下的性能是下一阶段相位计研究的主要问题[15-18]。
针对目前太极计划引力波探测存在的问题,本文设计并构建了多通道相位测量系统(以下简称多通道相位计),且对相位计在各种工况下的性能做了较为完整的测试和评估。全文结构安排如下:第二部分为系统软硬件设计及构建,主要阐述了多通道相位测量系统的硬件组成以及基于数字锁相环(Digited Phase-Locked Loop, DPLL)的测相方法学原理及其现场可编程门阵列(Field Programmable Gate Array, FPGA)实现框架;第三部分对多通道相位计进行时域功能测试,包括准确度、线性度等;第四部分进行频域噪声测试,包括不同峰峰值、不同通道、不同频率下的相位噪声水平的测量和分析。
2 相位计设计及构建
多通道相位计在结构上由硬件和软件两部分组成,以下将详细介绍软硬件的构成。
2.1 硬件设计
相位计硬件结构示意如图1 所示。

图1 多通道相位计硬件结构示意图Fig.1 Schematic diagram of hardware structure of multi-channel phasemeter
从图1 可以看出,多通道相位计硬件部分由模数转换(Analog to Digital,AD)子卡和FPGA 母卡组成。AD 子卡主要完成模拟信号采集,板载4 片4 通道高速ADC(AD9253)芯片,支持16 路信号的采集和传输。为减少不同ADC 间的通道噪声,板卡选择对称化设计,前端模拟电路的路径长度相同。同时,为消除采样抖动噪声,板卡引入导频信号(Pilot Tone,PT)进行修正[19],原理如图2 所示。

图2 导频校正原理图Fig.2 Pilot tone Correction Schematic
首先对导频信号进行功率均分,之后与待测信号进行叠加,并送入ADC 进行采样。由ADC采样抖动引入的相位误差分别被待测信号与导频信号记录,此时相位误差与频率大小成正比。最终,通过以下公式可消除相位差中的采样抖动误差。
其中, φa、 φb分别为图中信号A 和信号B 经过导频 信 号 修 正 之 后 的 相 位 信 号; ϕha、 ϕhb分 别 为图2 中信号A 和信号B 在导频修正之前的相位信号; ϕpa、 ϕpb分别为导频信号被ADC 的A、B 两通道采样后的相位信号。fh、fp为待测信号及导频信号的频率。为减少噪声混叠,分别在ADC 和导频模拟电路前端设置了抗混叠滤波器。考虑到太极计划中干涉信号的频段为5-25 MHz,设置ADC 前端抗混叠滤波器的截止频率为30 MHz。为放大采样抖动噪声,进而更好地消除采样抖动,导频频率一般远高于待测信号,本项目中导频信号抗混叠滤波器的截止频率设置为65 MHz。
FPGA 母卡主要完成相位计的算法实现、数据通信控制等功能,其由FPGA 处理器、以太网通信物理层(Physical,PHY)芯片、板载50 MHz时钟及时钟管理芯片等组成。子卡与母卡间采用FPGA 夹层卡(FPGA Mezzanine Card,FMC)连接器连接,用于完成板间的数据交互、时钟、供电等功能。驱动时钟既可以由板载的时钟给出,也可以其由外部高精度时钟源给出,经FPGA 内部锁相环倍频至80 MHz 后作为全局时钟使用。整体实物图如图3 所示。

图3 多通道相位计硬件实物图Fig.3 Hardware prototype of multi-channel phasemeter
2.2 软件设计
软件部分由可编程系统(Programmable System,PS)端软件和可编程逻辑(Programmable Logic, PL)端软件两部分构成。其中,PS 端运行定制化的Linux 系统。该系统由Xilinx 提供的Petalinux工具包生成[20],且基于Linux 系统封装了对PL 侧寄存器的读写命令以及网口驱动等工具便于调试和使用。该部分不属于本文讨论的重点,不再展开叙述。PL 端则集成了针对外围器件的驱动、通信协议以及相位测量算法,其中最核心的是基于DPLL 的相位解调算法[19]。该算法的原理框图如图4 所示。DPLL 采用二阶环设计,待测信号由ADC 以80 MHz 的采样速率采样后进入FPGA,其与DPLL 内部的数控振荡器(Numerical Control Oscillator, NCO)的输出信号混频并低通滤波后,得到两混频信号的相位差,经过比例积分(Proportional Integral,PI)控制器后反馈控制NCO 的输出频率,最终使得环路达到稳定。输入信号与NCO 的输出信号同频同相,用以实现相位锁定。环路中加入PI 控制器,旨在改善环路的动态和稳态性能,由于PI 控制器的输出直接对应控制NCO 的频率,因此在环路锁定之后,通过提取该信号并积分,即可得到输入信号的相位信息。

图4 基于DPLL 的相位解调算法原理框图。(MUL:乘法器;LPF:低通滤波器;UDP:用户数据报协议)Fig.4 Block diagram of phase demodulation algorithm based on DPLL.(MUL: Multiplier; LPF: Low Pass Filter; UDP: User Datagram Protocal)
多通道相位测量系统在PL 侧的部署框图如图5 所示。信号经ADC 采样之后,首先经频率捕获模块进行粗测频,得到待测信号和导频频率的初始值并将其转化为DPLL 能够识别的频率控制字(Frequency Control Word,FCW)以初始化各自DPLL。不同DPLL 开始跟踪输入的不同通道的信号,提取各NCO 的频率变化值,经过级联积分梳状滤波器(Cascaded Integrated Comb Filter,CIC)抽取后速率降至20 Hz。最终,4 片ADC 对应的16 路信号的频率波动将会按照以太网报文格式打包,通过用户数据报协议(User Datagram Protocol,UDP)使用网口上载至PC(Personal Computer)端。在PC 端对采集得到的数据进行后处理,即可得到输入信号的相位信息。
3 时域功能测试
空间引力波探测中,相位计主要测量单一通道的相位/频率波动,或通道间的相位差。相位计测试首先需验证相位测量的准确度和线性度。分为静态和动态两种情况:静态测试时,通道间的相位差为固定值;动态测试时,两通道输出信号的初始相位保持一致,输出频率间设定为一个细小差值,测量随时间变化下两通道的相位差是否呈线性变化,并评估其线性度。其次,由于轨道间的多普勒效应会导致干涉信号频率出现大范围漂移。因此,相位测量系统是否具备跟踪干涉信号大范围频率漂移的能力也是一个重要测试项。实验设备实物图如图6所示。

图6 实验设备实物图Fig.6 Physical prototype of experiment set up
3.1 相位静态线性度测试
静态测试时,使用信号发生器(KEYSIGHT 33500B)为标准信号源,信号发生器的两个输出通道的频率、初始相位和峰峰值均相同。开始测试后,固定通道1 的相位不变,改变通道2 输出信号的相位。相位计的目标带宽是5~25 MHz,因此,信号频率分别设定为5、15、20、25 MHz,峰峰值为1 Vpp,初相均为0°。相位差以30°为步长从0°到360°变化。为避免信号发生器与相位计时钟不同步引起的相位偏移,本文使用信号发生器的时钟同步相位计。为避免环境噪声的影响,每个点测量5 s 取平均。测试结果如图7所示。

图7 不同频率下相位静态线性度测试结果。(a) 5 MHz; (b) 15 MHz; (c) 20 MHz; (d) 25 MHz;Fig.7 Phase static linearity test results at different frequencies.(a) 5 MHz; (b) 15 MHz; (c) 20 MHz; (d) 25 MHz;
图7 表明多通道相位计在不同频率下,相位计能够准确反映出待测信号的相位变化,且具有良好的线性度。拟合曲线R2均等于1(四位小数),曲线斜率约等于1(四位小数)。
3.2 相位动态线性度测试
动态测试时,设置信号发生器的两个输出通道的幅值、初相均相同(KEYSIGHT 33500B),幅值为1 Vpp,初相为0°。设定每两通道的频率间均有一微小差异,分别为0.01、0.02、0.04 和0.08 Hz。理论上,信号发生器的两通道之间存在固定频率差时,通道之间的相位差将随时间呈线性变化,为保证每次测量的相位差区间为0°到360°,4 组频率差测量分别计时100、50、25 和12.5 s。同时,为避免时钟不同步引起的相位偏移,本次测试选用信号发生器的时钟同步相位计。测试信号频率为5 MHz 的测试结果如图8所示,其它频率的测试结果见表1(保留六位小数)。

表1 动态测试下拟合曲线斜率Tab.1 The slope of the fitting curve under the dynamic test

图8 不同频率差下相位动态线性度测试,测试信号频率5 MHz。(a) 0.01 Hz; (b) 0.02 Hz; (c) 0.04 Hz; (d) 0.08 Hz;Fig.8 Phase dynamic linearity test results at different frequency differences with signal frequency 5 MHz.(a) 0.01 Hz; (b)0.02 Hz; (c) 0.04 Hz; (d) 0.08 Hz;
图8 和表1 表明多通道相位计在动态测试时,能够准确地反映出待测信号的相位变化,且具有良好的线性度。图8 拟合曲线R2均等于1(四位小数),曲线斜率均能准确反映相位的变化速率。
3.3 频率跟踪能力测试
进行频率跟踪能力测试时,使用信号发生器的频率调制(Frequency Modulation,FM)调频功能,载波主频为5 MHz,峰峰值为1 Vpp,初相为0°,调制深度为1 kHz,调制速率分别为2、4、8 mHz,换算得到的频率漂移速率分别为4、8、16 Hz/s,测试时间为2 000 s,通过读取相位计的频率输出来判断相位计是否能够应对信号频率高速率漂移的科学任务。为避免信号源与相位计之间由于时钟不同步带来的相位(频率)偏移,使用信号发生器的时钟同步相位计后进行测试,测试结果如图9(彩图见期刊电子版)所示。
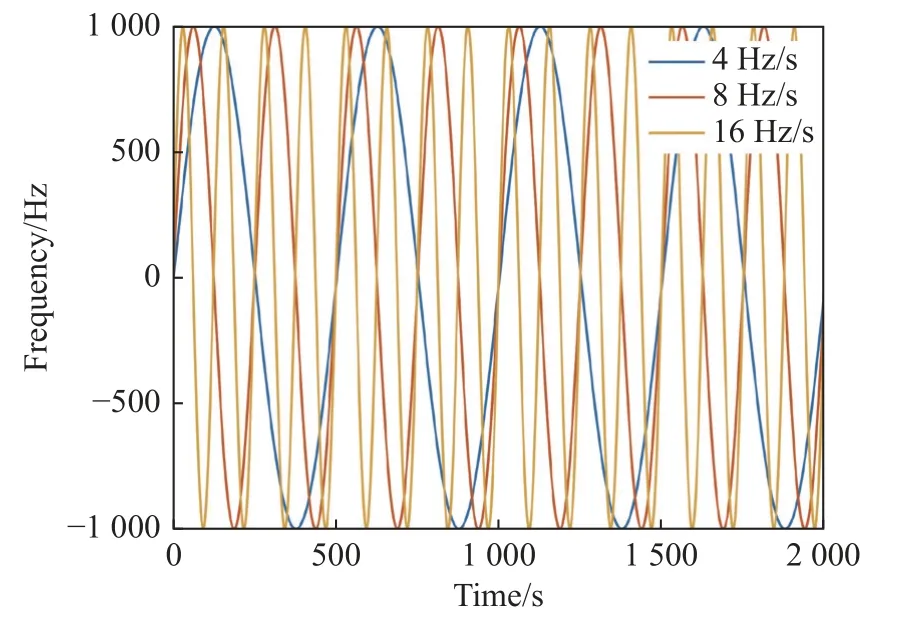
图9 频率跟踪能力测试结果Fig.9 Test results of frequency tracking capability
图9 表明,在16 Hz/s 的高速频率漂移下,相位计仍然能够准确跟踪输入信号。而在空间引力波探测中,前期研究显示,航天器之间由多普勒频率引起的干涉信号的频率漂移的最大速率小于10 Hz/s[21]。综合上述实验结果,表明本文多通道相位计完全具备跟踪星间多普勒频移带来的干涉信号频率漂移的能力。
综合上述3 组测试结果可知,本文多通道相位计具备良好的测相线性度和准确度,能够满足地基激光干涉实验中精准相位读出或频率读出的需要;针对具有频率漂移的信号,多通道相位计能够实时跟踪信号的频率变化并输出正确的频率值,说明相位计能够应对较大范围的频率漂移问题,能够满足空间引力波探测的需要。
4 频域噪声测试
由于空间引力波探测目标波源具有明显的频率特征,因此对测试系统的噪声评价常采用频域幅度谱密度的评价方式。
一方面,空间干涉信号的频率在5~25 MHz区间内波动,且信号幅值变化会引起信号信噪比的改变。另一方面,多通道相位计共有4 片ADC,可以同时跟踪采集16 路相位信息,但同一ADC不同通道之间以及不同ADC 的通道之间存在差异,能否保持目标精度尚有待验证。下文将对相位计不同工况下的相位噪声做测试评估(导频修正后),评估方法为幅度谱密度,并采用德国Albert Einstein Institute 开发的LTPDA(LISA Technology Package Data Analysis)工具箱进行平滑处理[21]。
4.1 不同ADC 通道下的相位噪声
本小节主要研究不同ADC 通道之间(包括同一ADC 不同通道和不同ADC 不同通道两种情况)的相位噪声水平。信号源由信号发生器给出,通道1 为待测信号,频率为5 MHz,峰峰值为800 mVpp,初相为0°;通道2 为导频信号,频率为15.1 MHz,峰峰值为1.6 Vpp,初相为0°。干涉信号经功分器(ZFSC-2-6+)一分二后接入两个待测通道,为使测量结果不引入功分器噪声,将导频信号也引入一分二功分器,将一端输出接入相位计的功分通道,另一输出接50 欧姆阻抗。本次共测试了7 组不同组合的相位噪声,不同ADC 之间和同一ADC 不同通道之间的测试结果如图10(彩图见期刊电子版)所示。

图10 不同ADC 通道之间相位噪声Fig.10 Phase noise between different ADC channels
4.2 不同频率下的相位噪声
本小节主要研究不同频率的干涉信号的相位噪声水平。由于轨道的运动,干涉信号频率在5~25 MHz 范围内波动。但信号频率增大,会导致一定程度上的频率(相位)抖动和信噪比降低,因此测试相位计在不同频率下的噪声水平是应用于空间测量的前提。设置干涉信号频率为5、10、15、20、25 MHz,所有测试信号的幅值固定为800 mVpp,初相为0°。除导频信号的频率随待测信号频率的不同而变化外,其余参数设置均与4.1 节实验相同,测试结果如图11(彩图见期刊电子版)所示。
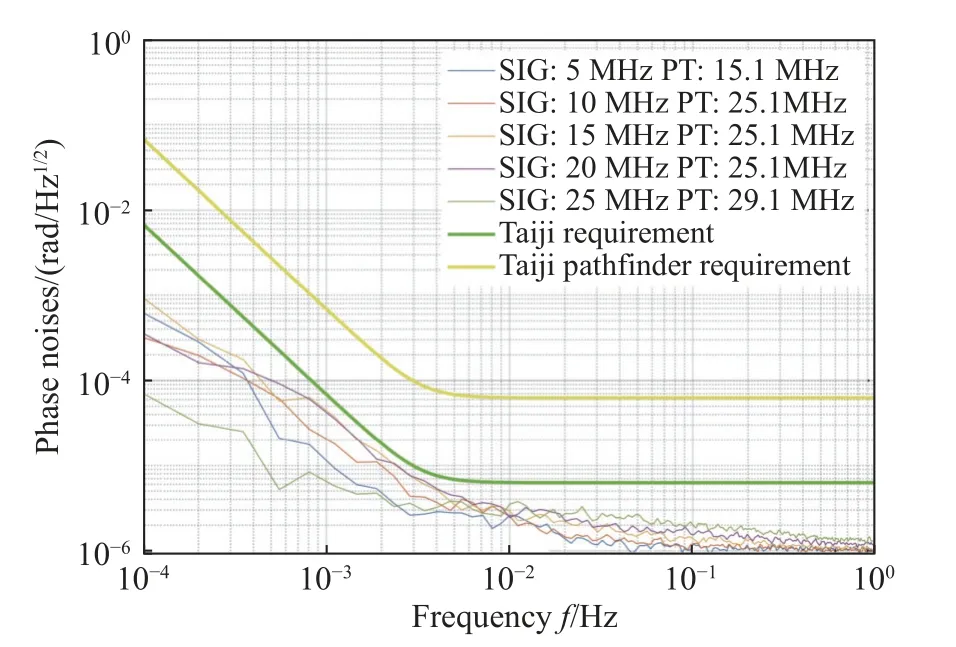
图11 不同频率下的相位噪声Fig.11 Phase noise at different frequencies
4.3 不同幅值下的相位噪声
由于光功率及臂长变化会引起空间干涉信号的幅值变化。本小节主要研究干涉信号在不同幅值下的相位噪声水平。幅值是影响信号信噪比最直接的物理量,信号幅值降低必然会导致信噪比降低,进而影响相位噪声本底。本次测试设置待测信号幅值分别为400 mVpp、600 mVpp、800 mVpp 和1 Vpp。随信号幅值变化,设置不同导频信号幅值。其余设置均与4.1 节相同,测试结果如图12(彩图见期刊电子版)所示。

图12 不同幅值下的相位噪声Fig.12 Phase noises at different amplitudes
图12 表明,在0.1 Hz-1 Hz 频段处,随着信号幅值的降低,相位噪声的幅度谱密度曲线随之升高,且曲线之间的差异较为明显,这说明信号的信噪比在很大程度上决定相位测量本底噪声水

5 结 论
在空间引力波探测中,相位计不仅需要完成测频测相的功能,作为干涉系统的配套电子学部分,相位计仍需完成诸如绝对距离测量与通信、时钟噪声传递等功能。因此,未来的相位计系统需集成以上功能,但在此情况下,分析各功能间的相互耦合关系,使相位计仍具备高精度的测量灵敏度是下一阶段解决的主要问题。
猜你喜欢
杂志排行
中国光学的其它文章
- 基于残差网络的结直肠内窥镜图像超分辨率重建方法
- Double-slot ultra-compact polarization beam splitter based on asymmetric hybrid plasmonic structure
- Decoherence of temporal quantum correlation in electrically controllable quantum-dots molecules
- The Poynting vectors, spin and orbital angular momentums of uniformly polarized cosh-Pearcey-Gauss beams in the far zone
- 单波长激光通信终端的隔离度
- 氨气高精度激光光谱检测装置的设计及实现