基于Inventor有限元仿真的异步电机转子模态分析
2023-10-07俞林范利辉孙明昌
俞林,范利辉,孙明昌
(隔而固(青岛)振动控制有限公司,山东青岛 266108)
0 引言
三相异步电机具有结构简单、运行可靠、重量轻和价格便宜等优点而广泛应用于机械设备、家用电器、冶金与矿山机械等领域[1]。转子机构是异步电机的重要核电部件之一,由于加工精度等因素,在电机转子高速转动时不可避免的会产生离心力,而导致产生电机转子机构的振动,转子机构振动会使轴承及电机其他结构出现疲劳破坏,进而直接影响电机的使用寿命。因此,分析电机转子机构的模态特性,对减小电机振动,提高电机寿命有重要意义。电机模态分析方法主要有解析法、试验法和有限元法,其中,解析法是最早应用于电机模态分析方法,其优点在于概念清晰,易于定性,缺点是仅对简单结构模型适用,对复杂模型很难获得高精度结果;试验法可以获得比较准备的模态参数,但由于需要大量传感器和测试设备,试验周期比较长,成本也比较高。有限元法具有对复杂结构模态分析精度高,计算周期短,成本低等优点,随着有限元计算技术发展和有限元软件的逐渐完善,有限元法在电机模态计算领域得到广泛应用。席荣盛等应用有限元法计算出了电动汽车永磁同步电机固有频率。王超应用有限元法精确计算柴油发电机组轴系的各阶固有频率和模态分析。
本文基于模态分析理论,通过Inventor仿真软件对三相异步电机转子机构进行模态分析,计算出转子机构前八阶固有频率及模态特性,为转子机构结构优化和产品迭代提供设计依据。
1 模态分析基本理论
模态是机械结构的固有振动特征,每一个模态具有特定的固有频率、阻尼比和模态振型。模态分析是将线性定常系统振动微分方程组中的物理坐标变换为模态坐标,使方程组解耦,成为一组以模态坐标及模态参数描述的独立方程,以便求出系统的模态参数[2、3]。
根据动力学理论,系统的振动遵循如下微分方程

(1)
模态分析基于系统的无阻尼自由振动,即上式可以表示为
(2)
设想系统产生同频率、同相位但各质点不同振幅的振动
u(t)=φsin(ωt+θ)
(3)
由式(2)、式(3)得这一运动需满足的条件是存在非零向量φ得
([K]-ω2[M])φ=0
(4)
满足式(4)的特征根ωr即为系统模态的固有频率,非零解向量φr即为对应频率下的振型。
2 转子机构有限元模型建立
2.1 转子机构总成三维建模
应用Autodesk_Inventor三维软件对异步电机转子机构进行三维建模,异步电机转子机构主要由电机轴、轴承套、屏板、端环和转子铁心组成,具体装配关系如图1所示,转子铁心与轴过盈配合,轴总长为802mm,最大外径为φ60mm,重22.6kg,转子铁心最大外径为φ110mm,宽度为150mm,轴承套与轴过盈配合,为了仿真计算方便,本模型忽略倒角等对整体受力影响不大的小特征[4]。
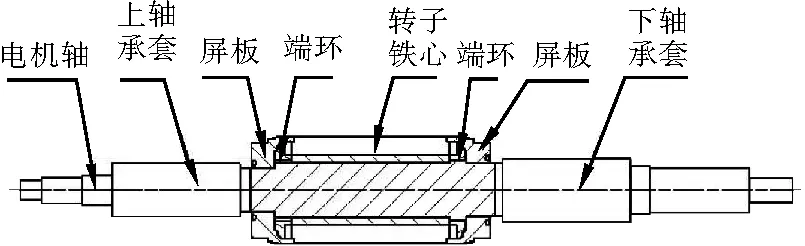
图1 转子机构
2.2 材料选择
异步电机转子机构的模态特性除本身结构外,还与各零件材料属性有着密切关系,本文根据转子机构各零件真实材料,通过Autodesk_Inventor三维软件对各零件赋予材料属性,保证有限元仿真准确。各材料属性如表1所示。

表1 转子机构各零件材料属性
2.3 边界条件设置
考虑到电子转子机构工作环境较为复杂,为使模态仿真分析更接近实际情况,根据异步电机转子机构各零件实际装配关系,轴承套与轴之间设置过盈配合,过盈量为0.01mm,转子铁心与轴之间设置过盈配合,过盈量为0.012mm,在上下轴承套上设置弹性约束。
2.4 网格划分
模型使用高品质单元创建网格,网格平均元素大小为0.08,网格数量267370个,节点数量506258个,分级系数1.5,网格最大扭曲度为60deg,具体如图2所示。
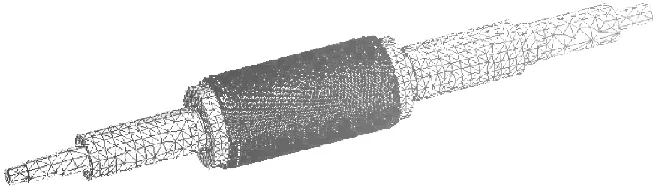
图2 转子机构有限元模型
3 转子机构模态分析
模态分析可以获得转子机构在一定频率范围内的振动特性,在实际电机工作激振频率作用下,前几阶频率响应占较大的权值,另外电机振动主要也是由转子机构的低阶模态引起,因此,对转子机构模态分析结果只提取前8阶固有频率及模态振型云图,具体如图3、表2所示。
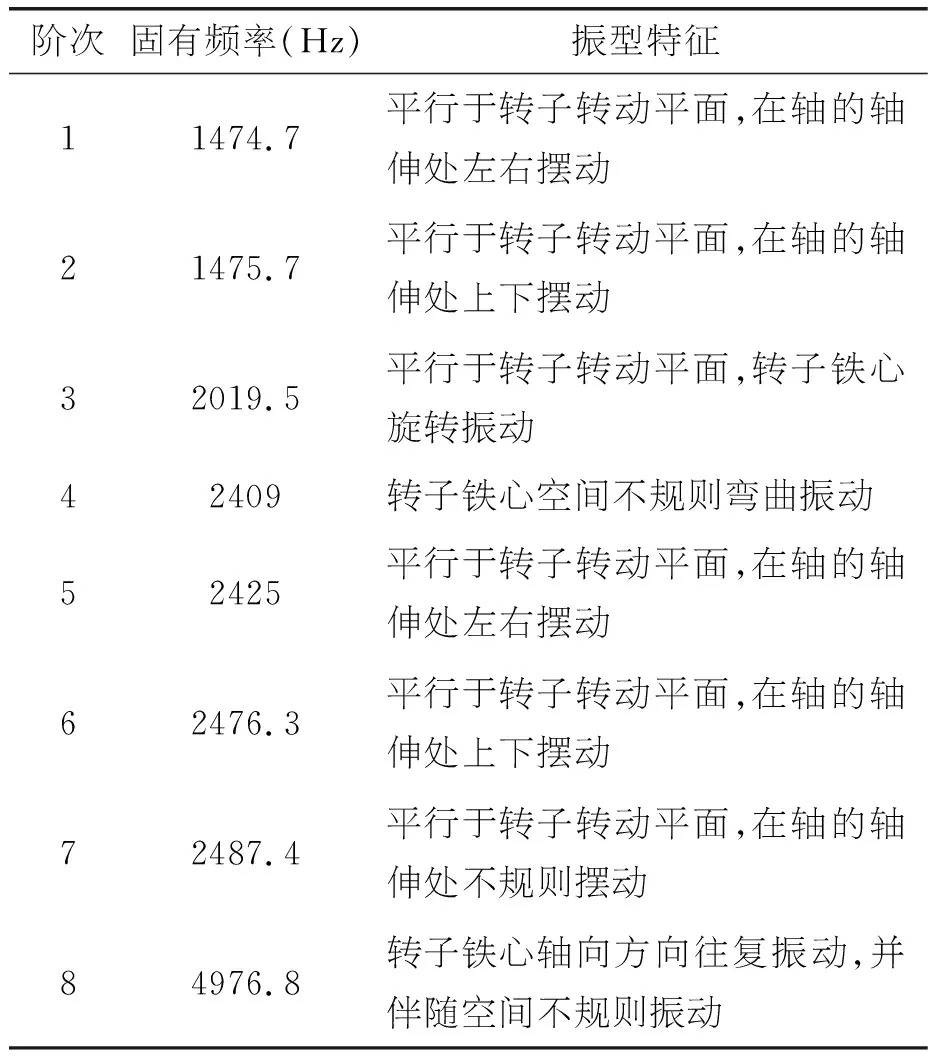
表2 转子机构前8阶模态频率及振型描述

图3 转子机构前8阶模态振型云图
由图3模态振型云图可知,转子机构前8阶模态固有频率分布在1474~4977Hz之间,随着阶次升高对应的固有频率也在增加,值得一提的是,1、2阶固有频率基本一致,只差1Hz,其原因在于,1、2阶模态振型表现在长轴轴伸处,并且几乎在同一平面内振动,1阶振型X方向最大位移为30.33mm,Y方向最大位移为25.56mm,而2阶振型X方向最大位移为25.54mm,Y方向最大位移为30.34mm。3阶模态振型在转子铁心旋转振动;4阶模态振型表现为转子铁心弯曲振动,X方向最大位移为29.32mm,Y方向最大位移为27.98mm。5、6、7阶振型表现在短轴轴伸处,并且振动形式与1、2阶相同。8阶振型表现在转子铁心轴向方向往复振动,并伴随XOY平面振动,X方向最大位移为5.49mm,Y方向最大位移为5.99mm,Z方向最大位移为39.76mm。
由电机转子与频率之间的关系得[5]
f=Pn/60
(5)

4 结语

