燕山大学 基于人机共融的神经环路调控康复机械手设计
2023-10-02张鹏孙利
张鹏 孙利


办学特色
我校工业设计专业依托河北省设计创新及产业发展研究中心(设计学智库)、河北省智能工业设计技术创新中心等平台,服务京津冀协同发展、北戴河国际生命健康产业园区等国家重大战略实施,围绕产业转型升级、“健康中国”战略深化等经济社会发展重大需求,开展了具有区域和行业特色的社会服务,并形成了康辅产品个性化设计、康辅产品智能化设计、康复训练系统虚拟仿真与交互设计、康辅产品人机工学研究多个优势特色方向,为国家和地方康养产业技术发展提供科研服务和技术支持,为企业提供研发到设计全流程服务。
基于人机共融的神经环路调控康复机械手设计
设计者:张鹏
指导老师:孙利
院校:燕山大学
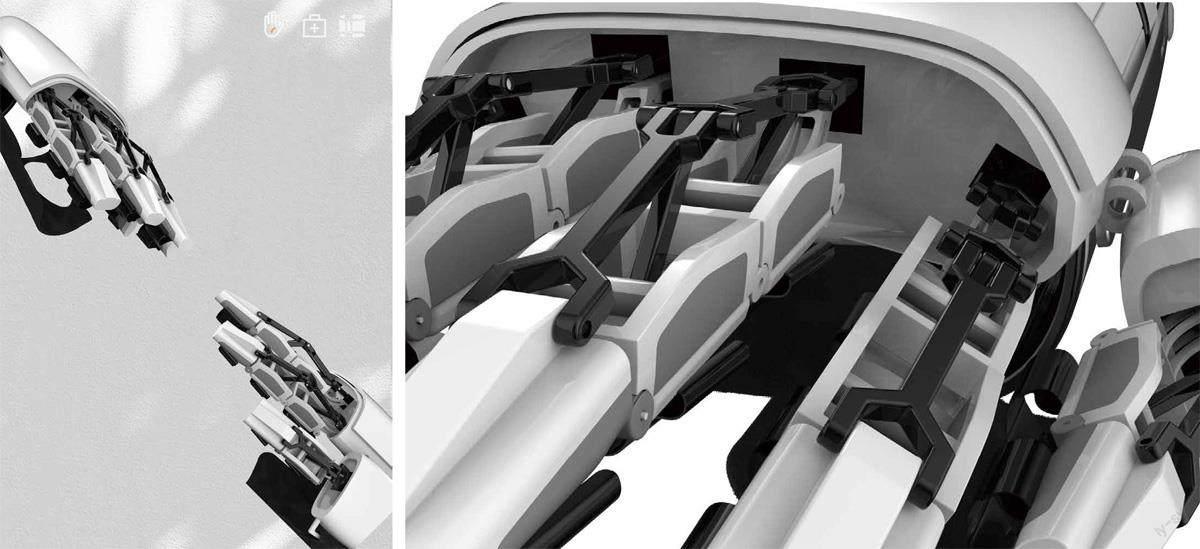
作者阐述:针对现有技术中存在的不足,对康复机械手进行模块化设计,得出一款由直线推杆电机驱动、局部闭链十杆结构传动,能够进行人机融合的闭链级联式可穿戴外骨骼机械手。基于CPM 理论和多自由度以及欠驱动原理设计了一款可穿戴式神经康复机械手,使康复机械手可以进行舒适、精确、稳定的康复训练,灵活实现主被动训练模式的自由切换,构建任务导向型五指协调功能性康复训练。
指导老师 孙利
孙利,燕山大学教授,工学博士,博士生导师。主要从事智慧康养辅具设计研发、机械装备产品创新设计理论与方法研究。从事智能康复辅具设计研究10多年,有深厚的高端装备创新工业设计理论和实践基础。
导师点评:作品《基于人机共融的神经环路调控康复机械手设计》,设计思路非常具有前瞻性,并在现有技术的基础上进行了深入改进。针对现有技术中存在的不足,对康复机械手进行模块化设计,设计出一款由直线推杆电机驱动、局部闭链十杆结构传动、 能够进行人机融合的闭链级联式可穿戴外骨骼机械手。基于 CPM 理论和多自由度以及欠驱动原理设计了一款可穿戴式神经康复机械手,使康复机械手可以进行舒适、精确、稳定的康复训练,灵活实现主被动训练模式的自由切换,构建任务导向型的五指协调功能性康复训练。综合运用了多项技术理论和原理,以提高机械手的功能性和康复效果。闭链级联式结构可以提供更好的稳定性和运动精度,而可穿戴式设计使机械手能够与患者实现更好的人机融合,这对于患者的接受度和训练效果至关重要。同时该设计还进行了实验验证和工程化实施,验证了该设计在康复领域的可行性和实用性并提供了许多值得深入研究的方向,在整个研究过程中,从需求层设想前瞻化、到行为层贴合最大化,逐步得出结构层的交互自然、合理化,既能够贴合老年用户的生理特征,又能够引导用户行为,极大地增强辅助机械手的多适性,使其在成功的愉悦体验中激發训练的积极性,反复通过训练强化患者的正确行为,最大限度地提高自身功能,从而提高生活质量,恢复自信,减少家庭成员及社会负担,这种创新对于推动康复机械手技术的发展具有积极意义。人口老龄化加速市场空间增长。本设计的实施将推动脑卒中患者的及时发现和有效治疗,使脑卒中患者病情得到及早康复,同时后期治疗的相对较及时,这可避免脑卒中患者因长期的高昂的治疗费用致贫返贫。由此可见,本研究具备多重经济社会效应,表现为不仅具有良好的商业价值,而且对于推动公共卫生健康问题的解决,甚至于缓解因病致贫的社会问题都具有重大的现实意义。
