滤波器阶数对导航接收机时域抗干扰的影响分析*
2023-09-28孙广富鲁祖坤李柏渝肖志斌郭海玉
孙广富,宋 捷,鲁祖坤,李柏渝,肖志斌,郭海玉
(国防科技大学 电子科学学院, 湖南 长沙 410073)
时域抗干扰是卫星导航接收机的常用抗干扰技术,其利用信号与干扰在频谱上存在的差异特点,设计自适应滤波器在时域滤除干扰信号,是窄带干扰的主要抑制技术之一[1]。由于在实际应用中常常面临速度、规模、功耗等硬件问题,高抗干扰需求对抗干扰滤波器性能提出了更高要求[2]。因此,基于时域自适应抗干扰滤波器的复杂度研究是导航接收机应用的重要课题。在导航接收机时域抗干扰中应用的自适应算法,如最小均方(least mean square,LMS)算法、递归最小二乘(recursive least squares, RLS)算法、Levinson-Durbin算法以及Burg算法等,都在抗窄带干扰中取得了良好的效果[3-4]。该四种算法都采用最小均方误差 (minimum mean square error, MMSE) 准则来设计滤波器,LMS算法和RLS算法更为常见[5-8]。其中,LMS算法由于其算法简单、计算量小、易收敛等优点,常应用于实际工程应用中[9]。
自适应滤波器长度对LMS算法的影响涉及计算复杂度、收敛速度和稳态误差,但是目前关于自适应算法基于滤波器长度对滤波性能影响的研究仅局限于定性分析[10]。早期研究中滤波器长度仅作为影响收敛速度等指标的一个因素参与谈论,过短自适应滤波器的性能发散得到了证明,控制滤波器长度也被反复讨论,并出现了几种动态控制滤波器长度的算法[11-13]。但是,相关的阶数研究基本从收敛时间和稳态误差等算法性能出发,实用于导航接收机抗干扰性能研究的自适应滤波器阶数分析和控制算法并不完善。
当前导航接收机中时域自适应抗干扰滤波器的阶数选取严重依赖工程经验而影响分析不足,通常在工程中将滤波器阶数设置为一个较大值以满足抗干扰需求,但会大大增加硬件复杂度。本文针对实用于导航接收机的滤波器阶数分析不足的问题,开展了时域自适应滤波器阶数对抗干扰性能的影响研究:首先建立导航接收机数字中频信号抗干扰模块的数学模型,在时域分别采用自适应LMS算法对干扰信号进行抑制;然后针对不同干扰环境分析滤波器阶数对抗干扰性能的影响;通过软件接收机和实物平台对各类时域自适应抗干扰算法进行仿真和实测,验证理论推导和分析的准确性;最后简易提出一种基于抗干扰需求的最优阶数设计方法。
1 数学模型
1.1 时域自适应抗干扰数学模型
如图1所示,抗干扰型导航接收机的基带数字信号处理器包含区别于其他类型导航接收机的抗干扰模块。其接收来自数字下变频的数字信号,用于完成窄带干扰等常规干扰信号抑制[14]。
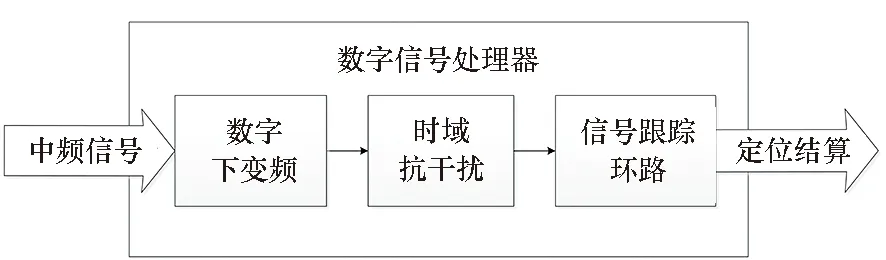
图1 导航接收机信号处理器Fig.1 Navigation receiver signal processor
假设导航信号经数字下变频后的信号、干扰和噪声互不相关,分别为s(n)、j(n)和nnoise(n),抗干扰前信号为:
x(n)=s(n)+j(n)+nnoise(n)
(1)
无干扰条件下的载噪比为:
(2)
即为导航信号抗干扰后的理想载噪比。式中,Ss(f)和Sn(f)分别为导航中频信号与噪声的功率谱密度,Bn为噪声带宽。
导航接收机的时域抗干扰技术是通过自适应滤波器在时域上对信号进行滤波,来达到抑制干扰的目的[14]。假设M阶滤波器的抽头输入量为:
xn=[x(n),x(n-1),…,x(n-M+1)]T
(3)
滤波权向量为:
WM=[w0,w1,…,wM]
(4)
则时域滤波器抗干扰后的输出为:
(5)
自适应滤波器最常用最小均方算法,其利用梯度最陡下降使误差信号均方值达到最小,具有计算量小、实现简单的特性[15]。如图2所示,抗干扰滤波器的输出信号y(n)与期望信号d(n)之间存在误差信号e(n):
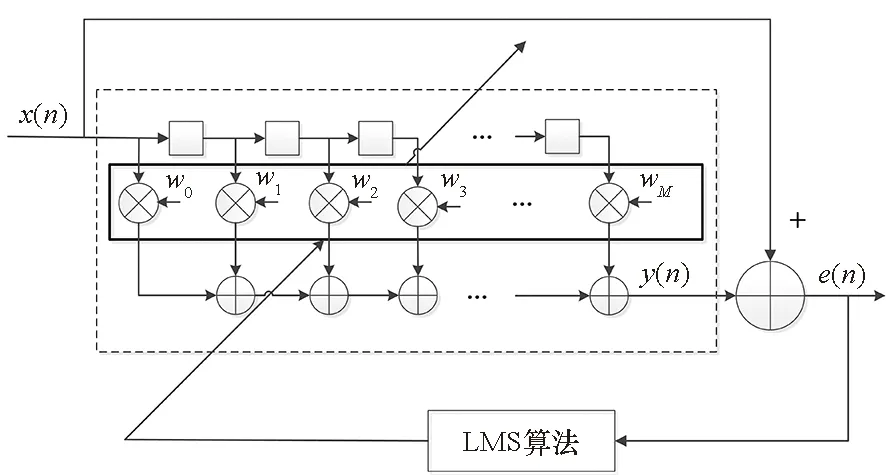
图2 时域自适应滤波器Fig.2 Time-domain adaptive filter
(6)
基于LMS自适应算法的抗干扰滤波器根据误差信号调整WM,均方误差的梯度向量为:
(7)

设置WM的初始值为WM,0,通过迭代使滤波权向量以步进μ沿负梯度方向变化:

(8)
式中,l为自适应迭代次数。
将式(7)代入式(8)得:
(9)
在实际应用中通常使用瞬时均方误差代替均方误差,最终得到LMS算法的递推公式为:
(10)
自适应滤波器的频率响应为:
H(f)=D(WM)
(11)
式中,D(·)表示离散时间傅里叶变换。
载噪比是抗干扰型卫星导航接收机的重要技术指标,抗干扰后载噪比估计值体现了抗干扰滤波器对干扰信号的抑制能力和对导航信号的完好保存能力,是对滤波器抗干扰性能的量化评估指标[16-17]。抗干扰后载噪比估计值为:
(12)
式中,Sy(f)是导航接收机抗干扰后信号的功率谱密度。
1.2 改进型LMS算法
LMS算法的稳态误差与步长成正比,而收敛速度与步长成反比,变步长LMS算法是改进型LMS算法的一个重要研究分支,通过在初始收敛阶段选取较大步长,在算法接近收敛时选取较小步长,可以解决这两个性能指标之间的权衡,改善稳态误差和不同阶数滤波器下的收敛性[18]。改进型LMS算法的研究包括变步长LMS算法、变阶数LMS算法、部分更新LMS算法和稀疏LMS算法等主要方向,并衍生出许多改进的方法,其中变步长LMS算法是最主要的算法改进方向[19-20]。
归一化最小均方 (normalized least mean square,NLMS) 算法通过对抽头向量进行欧式范数平方的归一化,实现了步长随时间变化:
(13)
归一化变步长最小均方 (normalized variable step size least mean square,NVLMS)算法在LMS算法和NLMS算法的基础上对时变步长进行了改进:
(14)
还有其他不同的改进型变步长LMS算法,例如文献[21]提出的新变步长LMS算法中:
μ(l)=β(1-e-α|e(n)|2)
(15)
式中,μ0、α和β都是影响算法收敛性的可调参数。
2 基于复杂度的抗干扰性能分析
2.1 滤波器阶数对抗干扰性能的影响
基于LMS算法的抗干扰滤波器代价函数为:
ζM(W)=E{e2(n)}
(16)
其表征为抗干扰后信号与预期导航信号的最小均方误差。当代价函数越小时,抗干扰模块对于导航信号的保存完好性越强,而对除导航信号以外的干扰的滤除效果越好,即代价函数是评价LMS算法抗干扰效果的根本指标[22]。
LMS算法采用的最优准则为MMSE准则,其收敛后的最优权向量趋近于经典的Wiener-Hopf方程的解[23]:
(17)
得到抗干扰滤波器最优时的维纳滤波器最小代价函数:
(18)
当LMS算法可收敛且自适应循环次数趋于无穷大时,抗干扰滤波器的解接近于维纳解Wopt,但是与维纳解之间存在额外均方误差(excess mean square error, EMSE),因此LMS算法具有次优性[24]。抗干扰算法收敛后的均方误差可以表示为最小均方误差和额外均方误差之和:
ξM=minζM+ζex(∞)
(19)
将minζM和ζex(∞)的比值定义为失调,表征抗干扰后的稳态误差与维纳解的差别:
(20)
经典LMS算法中,失调量ΜM已由Widrow推导出:
(21)
其中,算法收敛需满足的条件为:
(22)
式中,tr(Rx)为输入信号自相关矩阵的迹,即为输入信号的总功率,可用集平均特征值λav表征:
(23)
(24)
式中,r(0)为Rx主对角线元素,τav为算法收敛的平均时间常数。
失调与滤波器阶数以及收敛速度之间的关系可以表示为:
(25)
由式(24)和式(25)即可得到抗干扰后的导航信号均方误差:
(26)
最小均方误差minζM是关于滤波器阶数的单调非递增函数,因此随着滤波器阶数增加,抗干扰滤波器的代价函数减小,即抗干扰性能不断提升。当滤波器阶数过小时,滤波器处于欠拟合状态,导致LMS算法发散,会引起较大的抗干扰误差。而当滤波器足够长时,由阶数增加引起的最小均方误差减小微乎其微,其增加了复杂度的同时还会使得稳态误差变大。
但由式(26)可知,均方误差表达式中含有同比参数M,使代价函数存在以滤波器阶数的二次速率下降的可能性,即产生自适应噪声。在同输入导航信号和同迭代步长时,阶数增加使得输入信号总功率增加,生成更大稳态误差。
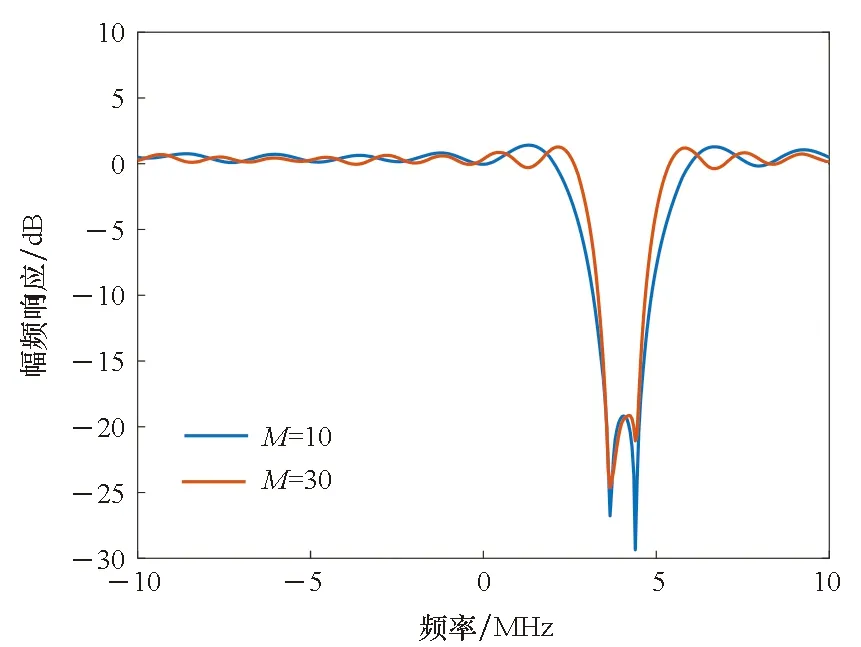
因此,时域抗干扰滤波器性能与滤波器阶数呈整体递增然后趋于平稳的关系,并在性能增加时存在稳态误差和局部最优性导致的数据波动。如图3所示,基于LMS算法的抗干扰滤波器在时间域内对信号特征做相关,在干扰信号所在频带形成零陷,当滤波器阶数增加时,滤波器过渡带压缩,阻带向干扰信号频带集中,因此有用信号损耗减小,且幅频响应的零陷加深,对干扰信号的抑制比增加,从而获得更好的抗干扰性能;当滤波器长度继续增加时,零陷与过渡带改善不明显,抗干扰性能的提升效果降低。
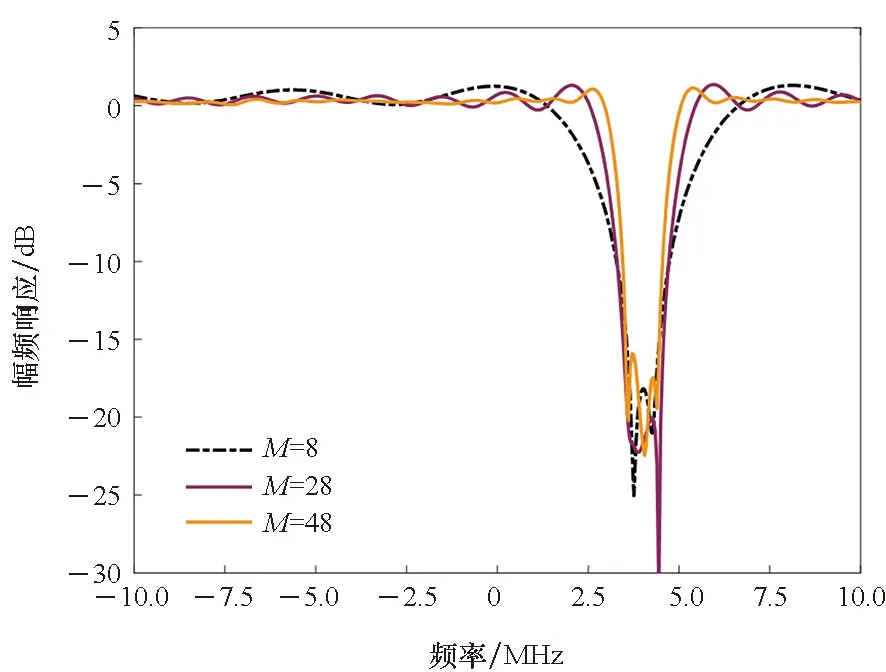
图3 幅频响应Fig.3 Amplitude frequency response
由式(22)和式(23)得到,迭代步长满足的收敛条件同滤波器阶数呈反比,当阶数增大时,迭代步长满足收敛的最大值降低,使得收敛条件更加严格:
(27)
因此,当滤波器阶数增加而步长不变时,算法收敛时间变长,当收敛速度减缓到一定程度而无法在规定迭代次数实现收敛时,则会影响抗干扰性能以及抗干扰是否实现。如图4所示,对于规定的步长值,抗干扰滤波器在阶数为8时快速收敛,随着阶数增加,收敛时间变长,当滤波器阶数为48时,滤波器权值在迭代结束时仍在继续收敛,可见其抗干扰性能明显变差;当步长增加时,同长度抗干扰滤波器的稳态噪声变大,收敛条件更为严格,导致抗干扰性能下降;当步长增加到20×10-6时,抗干扰滤波器在48阶时发散。
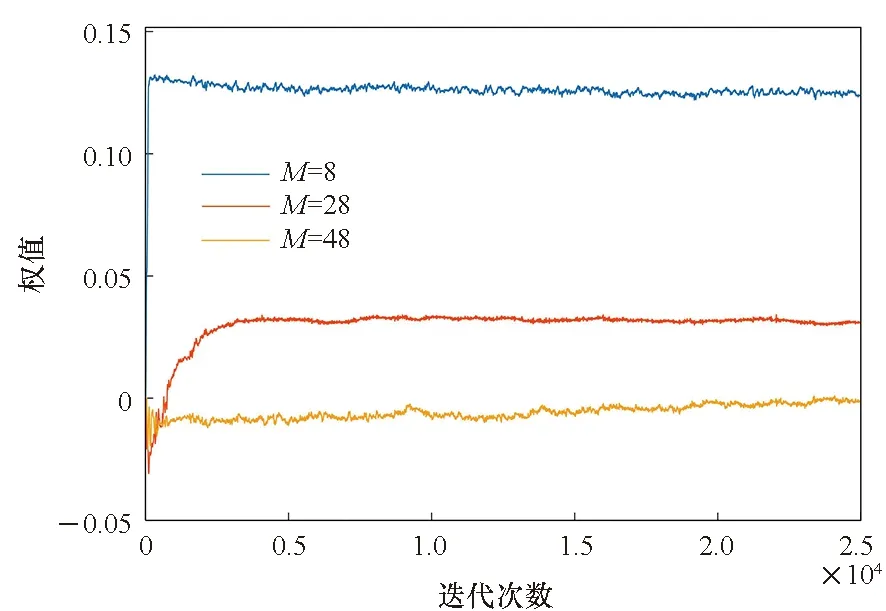
(a) μ=5×10-6
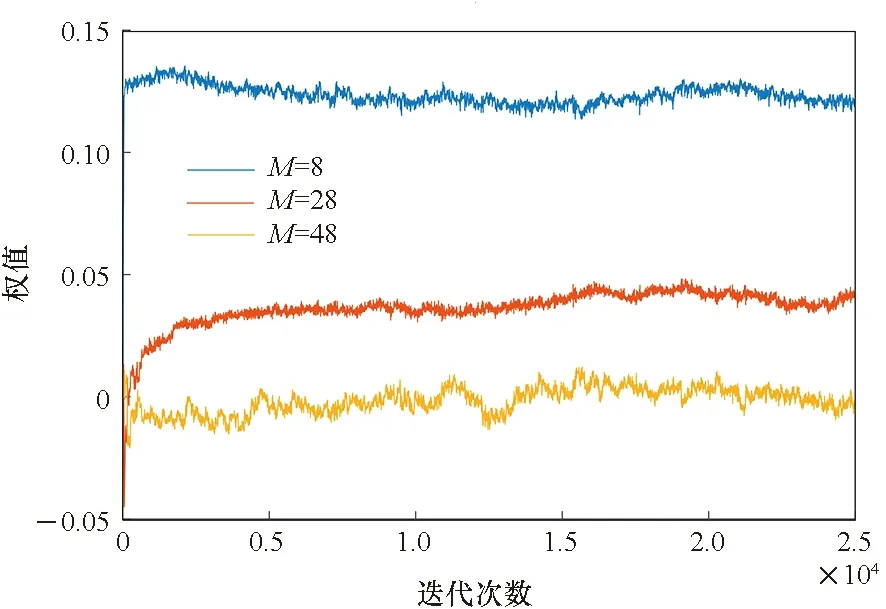
(b) μ=17×10-6
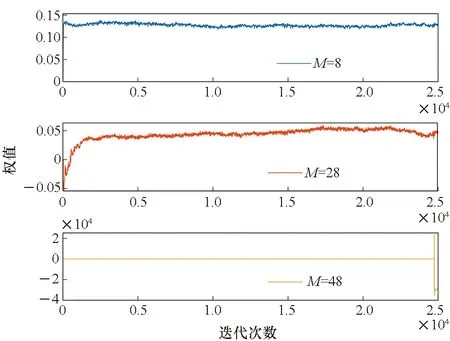
(c) μ=20×10-6图4 滤波器阶数与步长的相互影响Fig.4 Interaction between filter order and step size
2.2 滤波器阶数面向不同干扰的影响差异分析
导航信号的扩频特性导致抗窄带干扰表现为带阻滤波器,当滤波器阶数相同时,LMS算法抗干扰性能面向不同功率、不同带宽干扰表现出不同的阻带衰减特征[25]。
p(j)=E{x(n)s*(n-j)}
(28)
r(i)=E{x(n)x*(n-i)}
(29)
则最小代价函数可以表示为:
minζ(W)=E{s2(n)}-
(30)
由于信号、干扰和噪声互不相关,p(·)即为期望信号的自相关函数:
p(j)=E{s(n)s*(n-j)}
(31)
因此,rxd在导航信号不变的前提下不受干扰信号参数影响,最小代价函数受干扰影响的可调项仅为Rx[26]。
干扰信号功率峰值与噪底的差值用干信比JSR表示,信号与噪声功率的差值用信噪比SNR表示,窄带干扰信号的干扰相对带宽为η,当干扰相对带宽小于20%时,干扰信号为窄带信号[27]。
自相关矩阵的对角线元素可以表示为:
(32)
当干扰信号功率或带宽增加时,r(0)增大,自相关矩阵的其他矩阵元素也有同样的变化趋势,则最小代价函数增大,即抗干扰性能降低[28]。
干扰信号功率越高,同长度滤波器的抗干扰效果越差,且有限长滤波器能达到的抗干扰极限性能越低。图5是不同干信比条件下同长滤波器抗干扰前后的频谱图和幅频响应:当干扰功率增大时,抗干扰后的零陷深度基本一致,但滤波器频率响应的过渡带明显拉宽,导航信号损耗增多导致抗干扰性能下降。
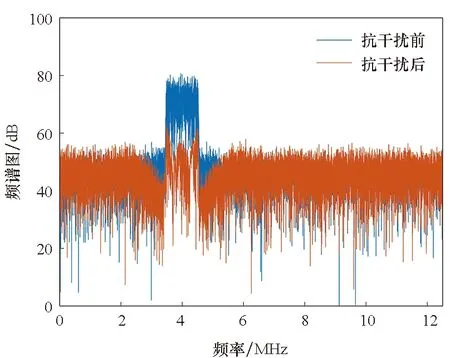
(a) JSR=40 dB
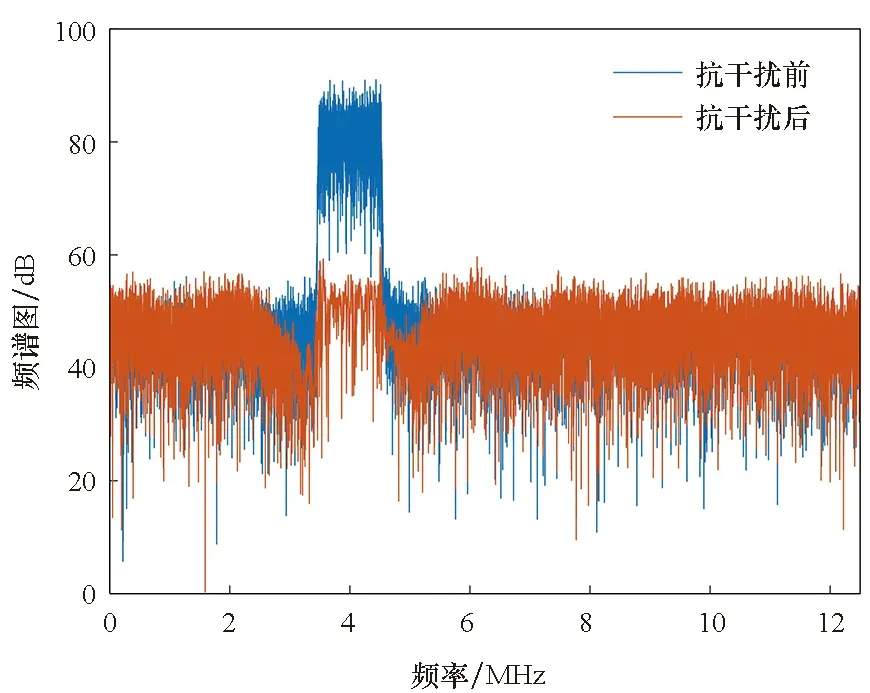
(b) JSR=50 dB
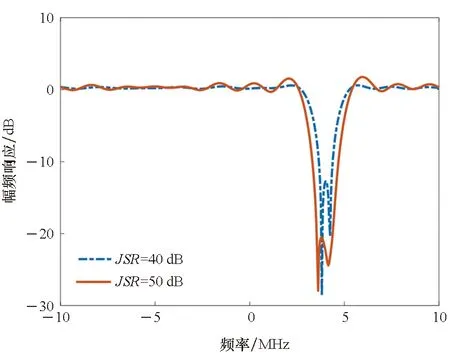
(c) 幅频响应对比(c) Comparison of amplitude-frequency response图5 干信比对同长滤波器性能的影响Fig.5 Influence of JSR on the anti-jamming performance of the filter with same length
干扰信号的相对带宽越大,干扰信号逐渐丧失窄带特征而向宽带干扰过渡,导航信号损耗导致的抗干扰效果降低程度逐渐超出抗干扰实际需求,因此自适应滤波器的抗干扰效果越差,且抗干扰极限性能降低。图6是干扰相对带宽分别为5%和10%下的抗干扰前后频谱图和幅频响应:干扰相对带宽增加对自适应滤波器的频率响应过渡带和零陷不造成明显影响,但是由于在干扰频带范围内的导航信号和加性噪声被损耗,实际抗干扰效果明显变差,且抗干扰极限性能降低。
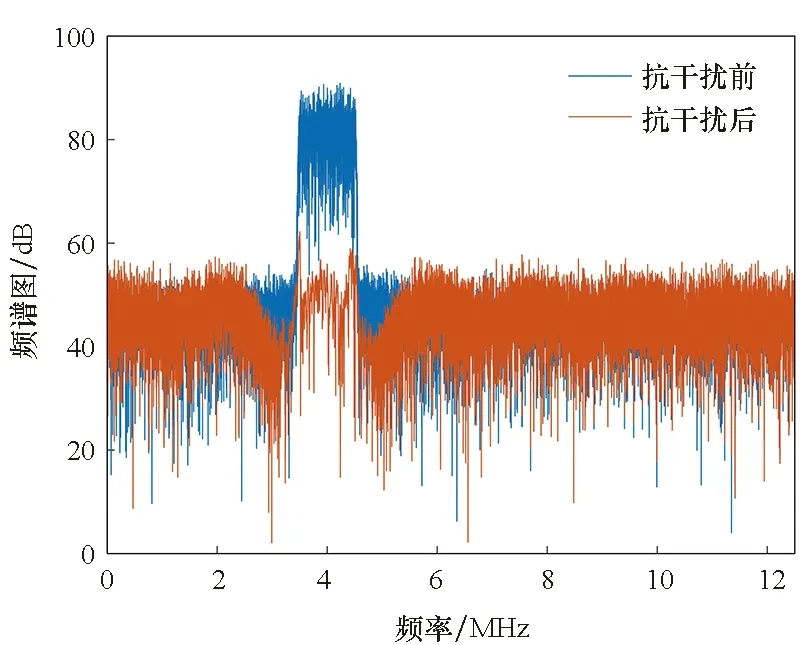
(a) η=5%
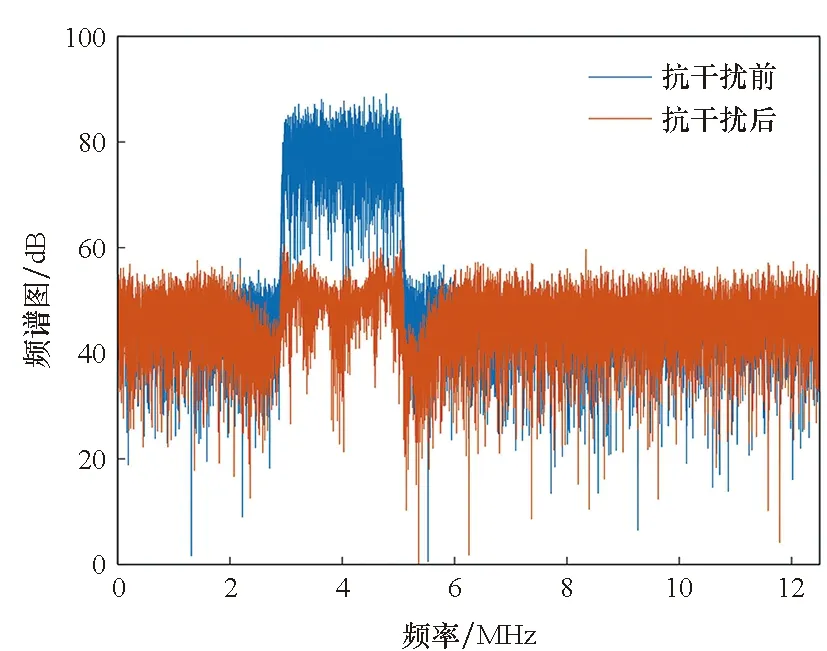
(b) η=10%
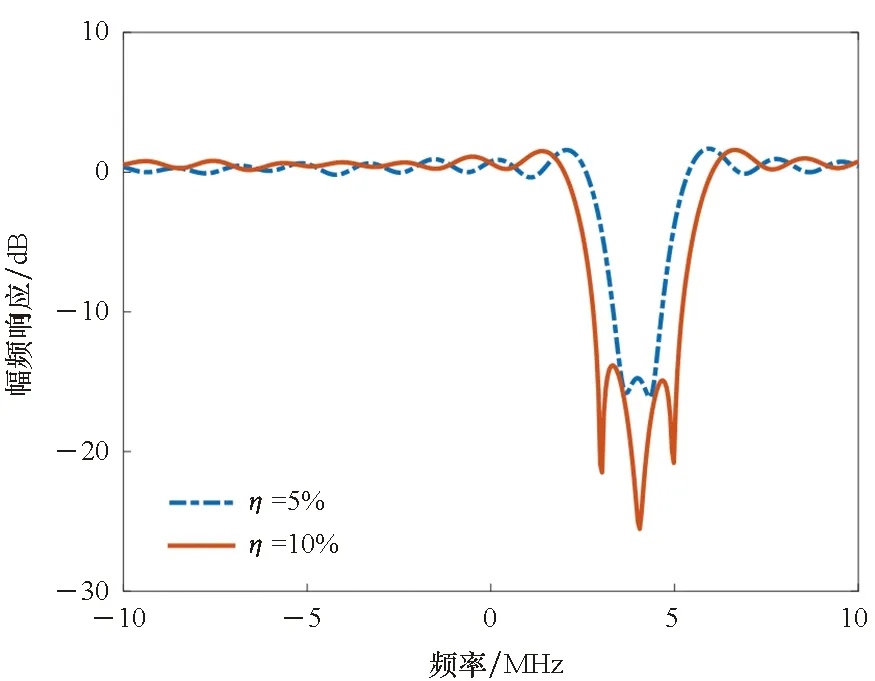
(c) 幅频响应对比(c) Comparison of amplitude-frequency response图6 干扰相对带宽对同长滤波器性能的影响Fig.6 Influence of interference bandwidth on the anti-jamming performance of the filter with same length
3 抗干扰性能验证
3.1 仿真实验
3.1.1 经典LMS算法
当原始信号载噪比为45 dB-Hz时,首先分析维纳滤波器的抗干扰性能,设定干信比为50 dB。如图7所示:维纳滤波器的抗干扰性能随阶数变化呈整体递增趋势,随着滤波器阶数持续增加,载噪比提升空间受干扰限制,抗干扰性能趋于稳定,不再有明显改善;由于不同阶数滤波器的维纳解之间相互独立,其滤波权向量之间不存在必然联系,因此存在数据波动。
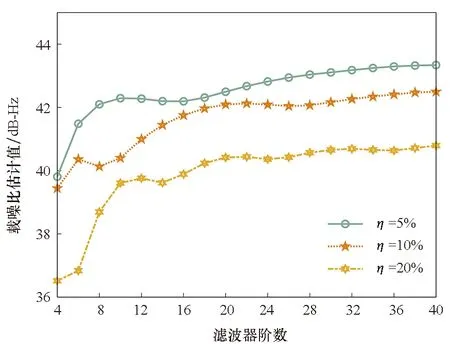
图7 维纳滤波器抗干扰性能Fig.7 Interference suppression performance of Wiener filter
LMS自适应滤波器的收敛程度和抗干扰性能受滤波器阶数、迭代次数和收敛步长等因素影响,最优权向量难以彻底收敛到维纳解,因此其抗干扰性能与滤波器长度并不是单调递增关系,而是趋向图7中所示的关系,且抗干扰性能低于维纳解。如图8所示:基于经典LMS算法的抗干扰性能随滤波器阶数的变化趋势整体递增,但存在一定的数据波动;当干扰相对带宽和干信比增大时,抗干扰需求增大且干扰带来的不确定性增加,导致数据波动也随之增大。
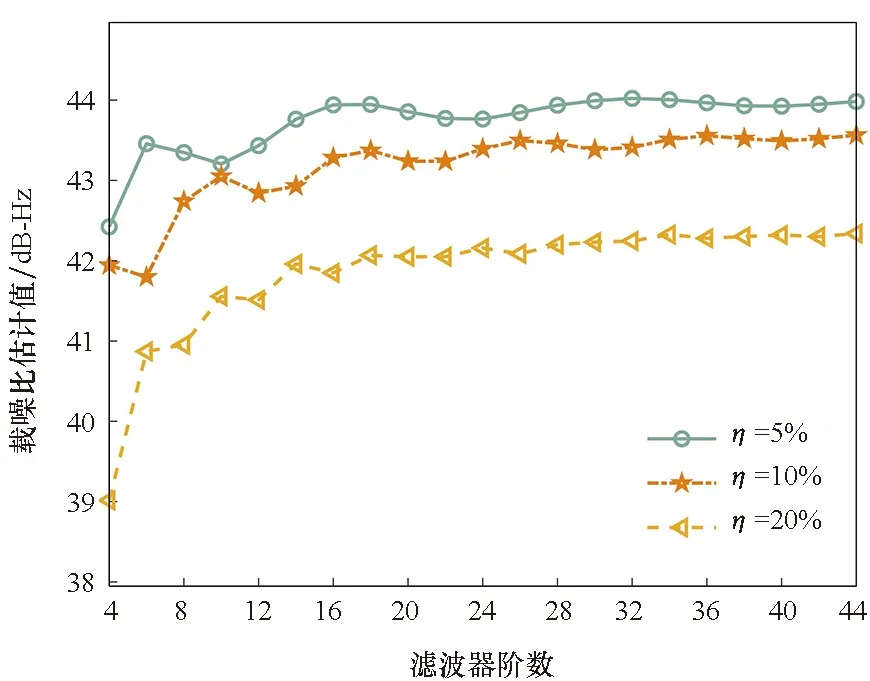
(a) 不同干扰带宽 (JSR=50 dB)(a) Different bandwidth (JSR=50 dB)
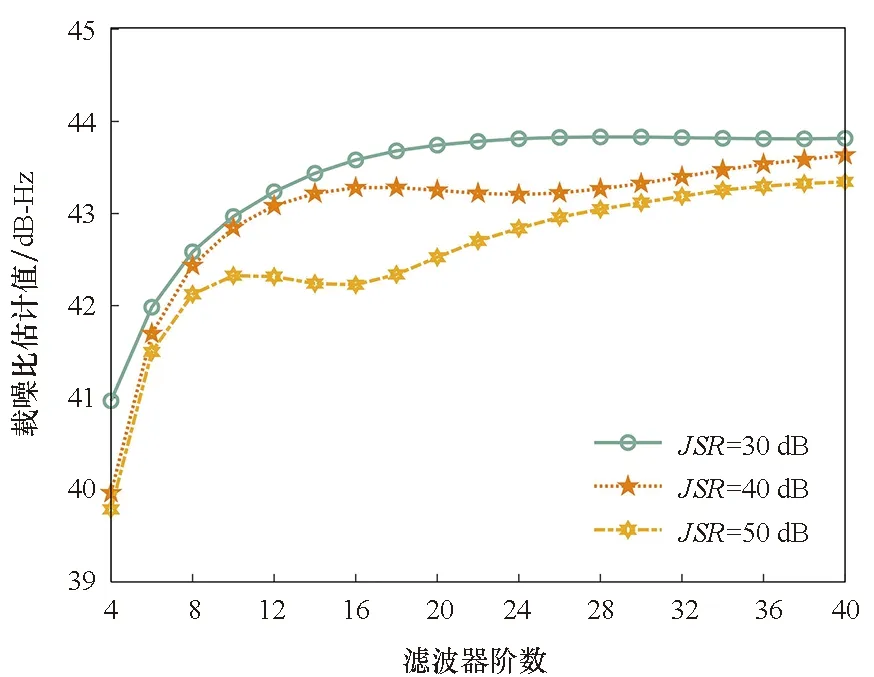
(b) 不同干信比(η=5%)(b) Different JSR(η=5%)图8 滤波器阶数对抗干扰性能的影响Fig.8 Influence of filter order on the interference suppression performance
当滤波器阶数足够长时,抗干扰性能提升空间忽略不计,而相同干扰环境下不同长度滤波器可获得的最大载噪比估计值即为抗干扰极限性能。图9为时域抗干扰在不同干扰环境中的抗干扰极限性能,无干扰载噪比为45 dB-Hz。如图9所示,随着干扰相对带宽和干信比增加,导航信号的损耗不断增长,时域抗干扰的极限性能降低;时域抗干扰只能抑制窄带干扰,当干扰带宽超出导航信号带宽的20%时,抗干扰逐渐失效。
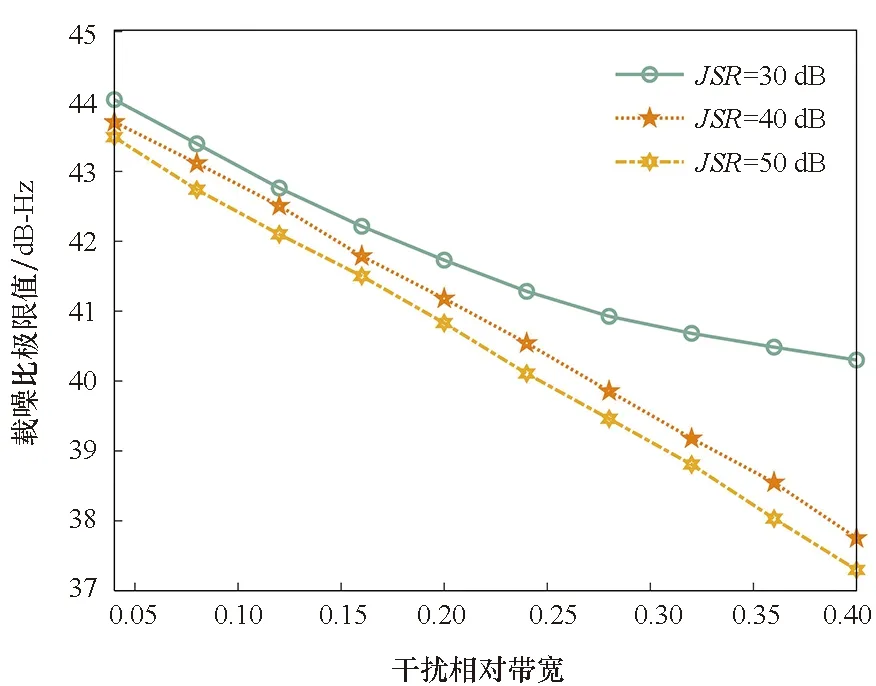
图9 抗干扰极限性能Fig.9 Ultimate interference suppression performance
为验证自适应算法收敛不足导致的数据波动问题,通过LMS算法不同阶数滤波器的权向量补零迭代,分析滤波器阶数对时域抗干扰的影响。此时,M阶滤波器的权向量初始值通过M-1阶滤波器收敛后的最优权向量补零获得:
(33)
式中,滤波器阶数M的初始值选取最小值2。
图10为滤波器权向量补零迭代后的抗干扰性能曲线,已知干信比为50 dB。该图表明,抗干扰性能随滤波器阶数变化曲线的数据波动源于各阶滤波器参数间的独立推导;当通过滤波权向量补零迭代使滤波器系数与每一阶滤波器相关时,抗干扰性能随滤波器阶数呈单调递增趋势,抗干扰性能出现迭代增加的特点,且优于LMS算法,但是权向量迭代使得收敛速度大大降低。
3.1.2 改进型LMS算法
变步长LMS算法的改进重点是减小稳态误差和加快收敛速度,稳态误差决定了抗干扰性能而收敛速度反映信息处理速度,但其理论最优仍是维纳解。对几种改进型LMS滤波器的阶数对抗干扰性能的影响关系进行验证,其抗干扰性能随滤波器阶数的变化趋势应和维纳滤波器以及LMS算法保持基本一致。假设仿真实验中的窄带干扰干信比为50 dB,干扰带宽为5%,同一算法的步长参数μ0不变,对不同改进算法在不同滤波器阶数下的抗干扰性能进行验证。
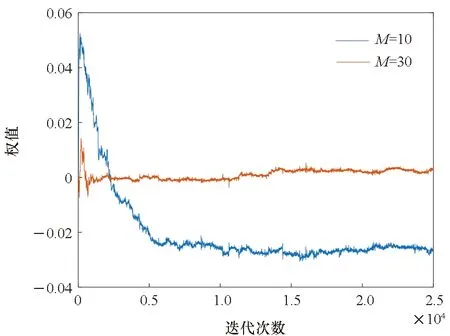
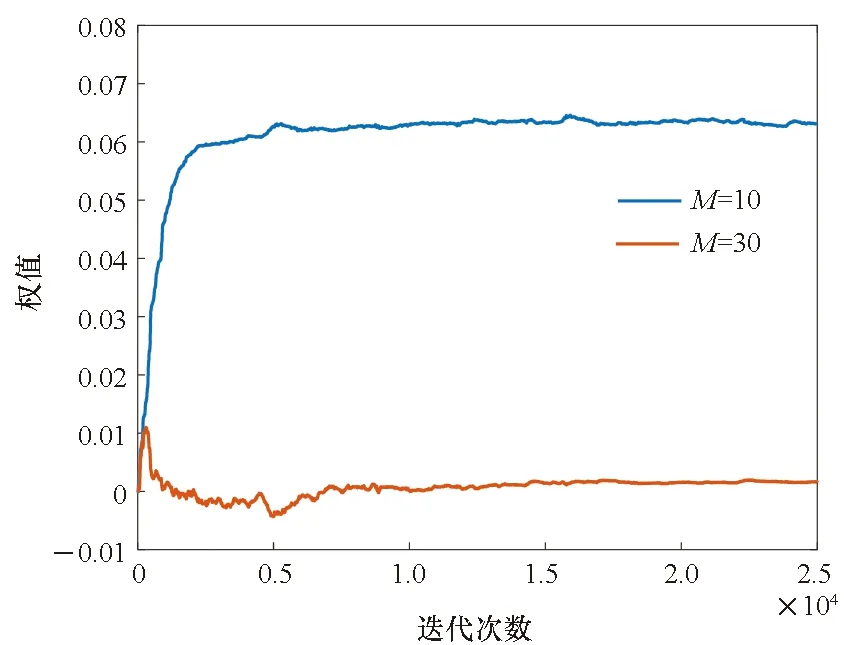
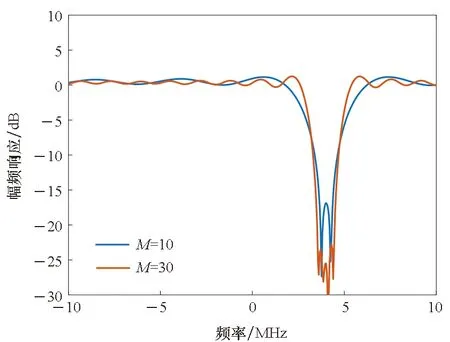
当步长参数不变时,滤波器抗干扰能力受滤波器阶数的影响,且影响程度受制于步长导致的收敛程度。图11~13是NLMS算法、NVLMS算法和新变步长LMS算法在滤波器阶数为10和30时的频率响应和收敛性能。各图表明,同一步长参数可使长滤波器更快收敛,短滤波器由于未收敛而抗干扰性能变差;当滤波器增加同样长度时,新变步长LMS算法的幅频响应优化程度小于NLMS算法和NVLMS算法,但其低阶滤波器收敛性明显优于另外两者。
(a) 幅频响应(a) Amplitude-frequency response
(b) 收敛性能(b) Convergence performance图11 NLMS算法性能Fig.11 Performance of NLMS algorithm
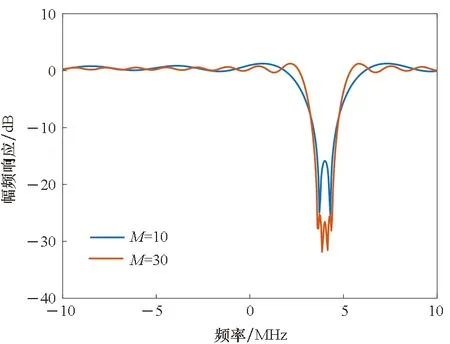
(a) 幅频响应(a) Amplitude-frequency response
(b) 收敛性能(b) Convergence performance图12 NVLMS算法性能Fig.12 Performance of NVLMS algorithm
(a) 幅频响应(a) Amplitude-frequency response
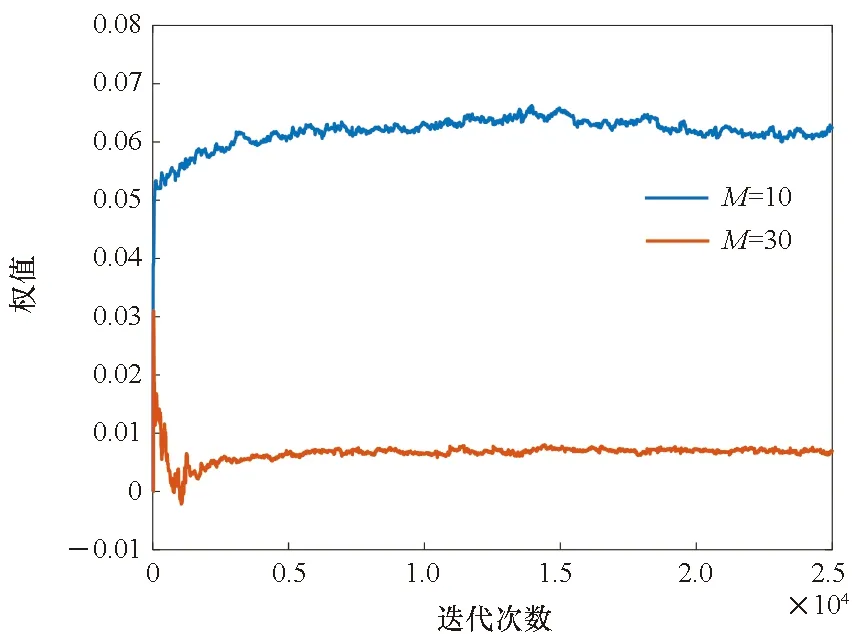
(b) 收敛性能(b) Convergence performance图13 新变步长LMS算法性能Fig.13 Performance of new variable-step LMS algorithm
不同改进算法在不同滤波器阶数下的抗干扰性能如图14所示,不同的改进型LMS算法的稳态误差各有差异,但抗干扰性能与滤波器阶数关系仍保持总体上升、存在数据波动的变化趋势。NLMS算法和NVLMS算法都有较好的抗干扰性能,且性能曲线波动较小,而新变步长LMS算法由于受到多个可变参数制约,在恒参数条件下产生了较大的曲线波动。
综上所述,表1基于滤波器阶数影响分析对文中几种自适应算法的性能进行了总结,包括抗干扰性能随滤波器阶数增加是否稳定、除滤波器阶数外的可变参数数量以及参数复杂度导致的抗干扰性能是否可控。
3.2 实测验证
为了验证本文理论分析和仿真实验在导航接收机实际场景下的适用性,在多种窄带干扰环境下进行了实测,所采数据为从北斗导航系统7号星发回的B3民用信号。此次共测试干扰带宽与干信比为1 MHz/40 dB、1 MHz/50 dB、2 MHz/40 dB、2 MHz/50 dB的四个场景,数据长度为1 ms,采样率为75.12 MHz,无干扰信号载噪比为58 dB-Hz。搭建的实测平台如图15所示。
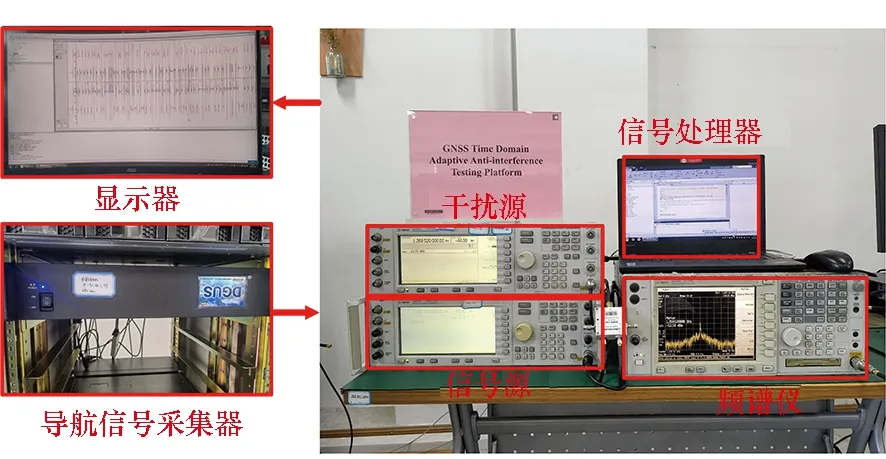
图15 实测平台Fig.15 Platform of the practical test
抗干扰性能随滤波器阶数的变化曲线如图16所示,主要采用NLMS算法:性能影响曲线呈现总体递增趋势,但恒步长限制了算法的收敛程度,从而产生了数据波动;带宽和功率更小的干扰更易快速收敛,从而不易受到恒步长制约,例如,2 MHz/50 dB干扰场景下的抗干扰性能曲线比其他干扰有更明显的波动走势。
针对上述宽带宽、高功率干扰场景下的抗干扰性能曲线波动问题,对步长制约因素进行验证,主要针对不同恒步长下NLMS算法进行实验,对2 MHz/50 dB干扰进行抑制。如图17所示,步长分别为0.01、0.02、0.05、0.08时,性能曲线下降处的滤波器阶数不同,极限抗干扰性能处的滤波器阶数也不同;此外,有限长滤波器的极限抗干扰性能最大差值为2.21 dB,这是由恒步长可能无法满足有限长滤波器的收敛条件导致的。
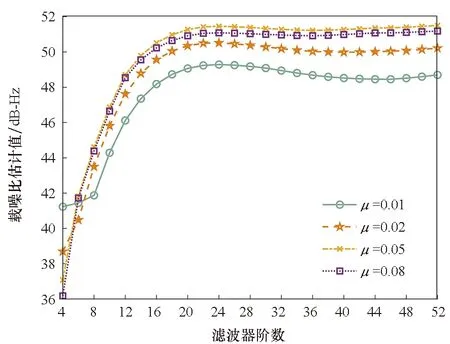
图17 恒步长对抗干扰性能曲线的影响Fig.17 Influence of constant step size on the interference suppression performance
由于算法结构的不同,持续增加滤波器阶数并不能保证稳定的性能提升,图18对经典LMS算法和三种改进型的LMS算法的抗干扰性能曲线进行了对比。对比几种算法采用有限长滤波器阶数时的极限抗干扰性,NLMS算法和NVLMS算法的收敛性都要优于传统LMS算法,其中NVLMS算法受恒参数制约影响更大。新变步长LMS算法则呈现较大的数据波动,由于可变参数多,且无法自适应地随干扰信号以及滤波器阶数进行调整,无法在恒参数条件下始终通过增大滤波器长度来提高抗干扰性能。
4 最优滤波器阶数
现有已知的变阶数LMS算法虽然在自适应领域滤波器阶数控制方面取得了较大发展,但在导航接收机领域应用时出现了工程不易实现、无法直接体现抗干扰需求等缺陷[29]。例如,分割滤波器LMS算法(segment filter LMS, SF-LMS)需要高速改变硬件结构,在工程上很难实现,且可变参数多导致难以控制性能,无法应对复杂多变的干扰环境[30];梯度下降LMS算法(gradient descent LMS, GD-LMS)相对前者简单易实现[31],分数阶数LMS算法(fractional tap-length LMS, FTLMS)的分数原则增加了算法灵活性和收敛性,但应用到导航接收机仍无法将滤波器设计与抗干扰需求直接关联[32]。
导航时域抗干扰滤波器的最优阶数选取需要以满足抗干扰需求为目的,而通过第2节的分析可知,复杂干扰条件下所需的滤波器阶数也是变化的。因此,需要根据干扰信号特征自适应调整抗干扰滤波器阶数,窗函数法是一种有效的时域数字滤波器设计方法。
窗函数法通过采用不同有限时宽的窗函数截短无限长序列,从而得到有限长序列,实现相应的有限冲激响应滤波器。在众多窗函数中,凯泽窗法可以通过阶数调整主瓣宽度和旁瓣衰减,因此能设计满足抗干扰需求的最短滤波器[33]。
凯泽窗由贝塞尔函数构成,含有复杂可变的窗形参数α,但是可以实现同等性能下最陡峭的窗函数过渡带:
(34)
式中:α为可调窗形函数,可以同时调整主瓣宽度和旁瓣衰减;Ι0(α)是第一类变形零阶贝塞尔函数。其傅里叶变换为W(ω)。
结合导航信号特点,凯泽窗法设计的数字滤波器阶数与干信比JSR、过渡带宽Δf、采样率fs的关系为:
(35)
由式(35)可知,可以通过调节阶数控制滤波器性能:
(36)
并由此得到滤波器的归一化上下截止频率ωa1、ωa2。
理想抗干扰滤波器频响为:
(37)
则抗干扰滤波器的频率响应为:
(38)
抗干扰性能通常用载噪比损耗这一指标量化,当无干扰条件下的载噪比与抗干扰后载噪比估计值的差值小于实际需求时,即满足抗干扰需求:
ΔCNR=[C/N]0-[C/N]ajm
(39)
Mmin=min{M|ΔCNR≤κ}
(40)
Mmin即为可变干扰环境下的自适应最优滤波器阶数。
5 结论
针对卫星导航接收机时域抗干扰中,基于抗干扰性能的滤波器阶数影响分析不足的现状,面向不同干扰环境和相关算法,分析了滤波器阶数对时域抗干扰性能的影响,并简易提出了一种自适应的最优滤波器阶数设计方法。实验结果表明,导航接收机的时域抗干扰性能受滤波器阶数的影响如下:
1) 时域抗干扰性能随滤波器阶数的变化趋势呈整体递增、存在数据波动的趋势。适当提升滤波器长度,可以有效提升时域自适应滤波器的抗干扰性能。
2) 抗干扰性能随滤波器阶数变化的数据波动来源于步长参数导致的收敛性不够。
3) 改进型LMS算法的性能提升受滤波器阶数影响各不相同,但性能变化趋势同维纳滤波器保持基本一致。
本文可以为导航接收机低复杂度的时域抗干扰研究提供明确的理论支撑,解决工程中阶数选取严重依赖实践经验而影响分析不足的问题,可以为导航接收机抗干扰模块的硬件优化提供借鉴。后续工作可根据第4节中提出的思路,进一步研究导航接收机时域抗干扰的最优滤波器阶数,即根据实际抗干扰需求,自适应地调整滤波器阶数,使其灵活应对复杂多变的干扰环境。