面向出行路径的车辆绿波速度控制方法
2023-09-27钟学坤吕昊琛郭唐仪
唐 坤,钟学坤,吕昊琛,徐 添,郭唐仪
(南京理工大学,南京 210094)
0 引 言
车辆在城市路网信号交叉口频繁启停是现代城市交通流的主要特征[1-2]。研究表明,这种频繁启停不仅降低交通系统运行效率,还增加能源消耗和环境污染[3-4]。因此,减少在信号交叉口的停车次数,甚至不停车通过所有交叉口到达目的地,对于提高交通运行效率、减少环境污染,以及推进高级辅助驾驶和自动驾驶技术的发展具有重要意义。
近年来,人们对车辆的绿波速度控制进行了一些研究。Zhang等[5]提出了一种智能交叉口速度控制方法。Xu等[6]将车辆分成队列,并考虑速度引导的影响,对FVD汽车跟随模型进行了改进。对于联网自动车辆(CAV)的连续信号交叉口速度控制,Lu等[7]提出了一种使车辆连续通过多个下游信号交叉口的方法。Liu等[8]提出一种利用遗传算法优化单交叉口交通灯信号的模糊控制方法。Liu等[9]提出了一种考虑旅行时间、油耗和排放等目标的生态速度优化模型。Ma等[10]提出了一种基于V2X通信的生态协同自适应巡航控制方法。在城市道路中,车辆在未知的交通状态和交叉口信号配时下,通常依赖驾驶经验来选择路径和速度。这常导致车辆选择拥挤路段或频繁停车,造成时间和能源的浪费。
针对上述问题,本研究提出一种面向路径的自动驾驶车辆绿波速度控制方法。它有助于提高运营效率,降低能耗和污染排放,促进城市交通系统的现代化和可持续性,并为先进的驾驶员辅助系统和未来的自动驾驶系统提供有力支持。
1 车辆绿波速度控制方法
本文提出方法的总体架构如图1所示,包括3个核心部分,依次为路况感知、路径规划以及绿波计算。

图1 总体架构
1.1 路况感知
通过硬件系统中的车载单元获取车辆的速度、加速度等信息。通过路侧传感器用于获取整个路段上的车辆行驶情况,将各类信息汇总上传到云端系统。
1.2 路径规划
主动绿波系统结合自身车速、红绿灯时序数据等多种因素[11],目标是提高红绿灯通过率,实现全程通行最优。该模块采用Dijkstra算法,调用算法重新进行路权分配[12]。
1.3 绿波计算
绿波计算是根据红绿灯实时数据、到达交叉口距离、路况信息等参数由自主设计的算法计算出一个速度区间,作为绿波建议速度,算法原理如图2所示。

图2 绿波算法流程
图3展示了在获取第i个交叉口红绿灯相位信息以及路段间距离后,对车辆速度进行规划的示意图,黑色曲线为车辆行驶路径,斜率为测量行驶速度。

图3 连续交叉口车辆速度控制示意图
设目标车辆驶入路网时为零时刻,tig表示目标车辆行驶路径上第i个交叉口当前绿灯相位时长,tir表示目标车辆行驶路径上第i个交叉口当前红灯相位时长,Tig表示目标车辆行驶路径上第i个交叉口绿灯相位周期时长,Tir表示目标车辆行驶路径上第i个交叉口红灯相位周期时长假设行驶路径上所有交叉口长度服从泊松分布,均值为d,第i个路段长度为xil。车辆通过i个交叉口的总距离见式(1):
(1)
式中,判断目标车辆能否不停车通过第1个交叉口,当前路段交叉口相位为绿灯时,不停车通行时间区间t1s见式(2):
t1s=[0,t1g]
(2)
式中,判断在此区间内行驶车辆是否超速,设车辆原速度为v0,驾驶员反应时间t0,车辆加速度a,加速时间为t1,速度更改后行驶时间为t2,车辆速度变化服从,见式(3):
(3)
根据式(3)当前路段交叉口相位为绿灯时,车辆可在第n个绿灯窗口通过交叉口的情况下,第n个绿灯区间通过交叉口的最大速度,见式(4):
vio=vmax
(4)
式中,若车辆不能在第1个绿灯窗口不能通过交叉口,且不超速的情况下,得到使车辆通过第n个绿灯区(n>1)间交叉口的最大速度,见式(5):
(5)
第n个绿灯区间通过交叉口的最小速度见式(6):
(6)
当前路段交叉口相位为红灯时,车辆可在第n个绿灯窗口通过交叉口的情况下,通过交叉口的最大速度见式(7):
vio=vmax
(7)
当车辆不能在第i个绿灯窗口不能通过交叉口,且不超速的情况下,第n个绿灯区间通过交叉口的最大速度见式(8):
(8)
第n个绿灯区间通过交叉口的最小速度见式(9):
(9)
得到使目标车辆在第i个交叉口不停车通行的速度区间见式(10):
viv=[vi0,vi1]
(10)
最终,将局部最优化得到的速度窗口迭代,得到行驶路径上最佳速度窗口见式(11):
vv=v1v∩v2v∩……∩viv
(11)
2 仿真与分析
2.1 模型仿真
本研究在Vissim 2022中建立了1个规模为3×4的双向四车道干路交通网,模拟城市道路复杂交通环境。实验设置了1 000 pcu/h车辆流量,并采用Vissim的随机路径引导来模拟一般交通情况。实验包含10个有信号灯的交叉口,红绿灯配时为5∶6时间间隔10 s。
针对复杂路网设计了拥堵、行人插队和排队车辆疏散等情况,展示算法的灵活性。记录了不同速度下车辆停车次数、行驶时间、燃油消耗、CO2、VOC(挥发性有机化合物)和NOx(氮氧化合物)排放量,并与未优化过的车辆进行对比。
通过Python与Vissim的COM-API实现了对目标车辆的实时控制,验证了绿波速度对通行状态的影响。通过比较调节绿波控制下的车辆和以(25~50)km/h无干扰行驶速度行驶在测试路线上数据,并使用Vissim排放插件测试CO2排放量和油耗,得出了车速与CO2排放量、油耗之间关系图表见图5、图6。研究结果显示,在复杂路网环境中使用绿波控制具有优势,并通过实时控制验证了绿波策略有效性。

图5 车速与CO2排放量关系图

图6 车速与油耗关系图
2.2 结果分析
1)在测试路线中,使用绿波速度行驶的车辆总行程时间为159.8 s,停车0次,通行效率提高了41.8%。绿波车辆在行驶中没有中途停车和大幅变速,与普通车辆相比行驶效率和通行体验均有提升。
2)本文选择同一道路上的无干扰车辆进行加权平均得到无干扰车辆油耗及CO2排放。由表1可知:使用绿波速度行驶的车辆油耗为0.027 36 L/km,CO2排放量为1.912 39 kg,绿波车辆油耗同比减少51.5%、CO2排放量同比减少51.7%。由此可知,采用绿波速度行驶相比较传统行驶方式可较大程度上减少油耗和排放。
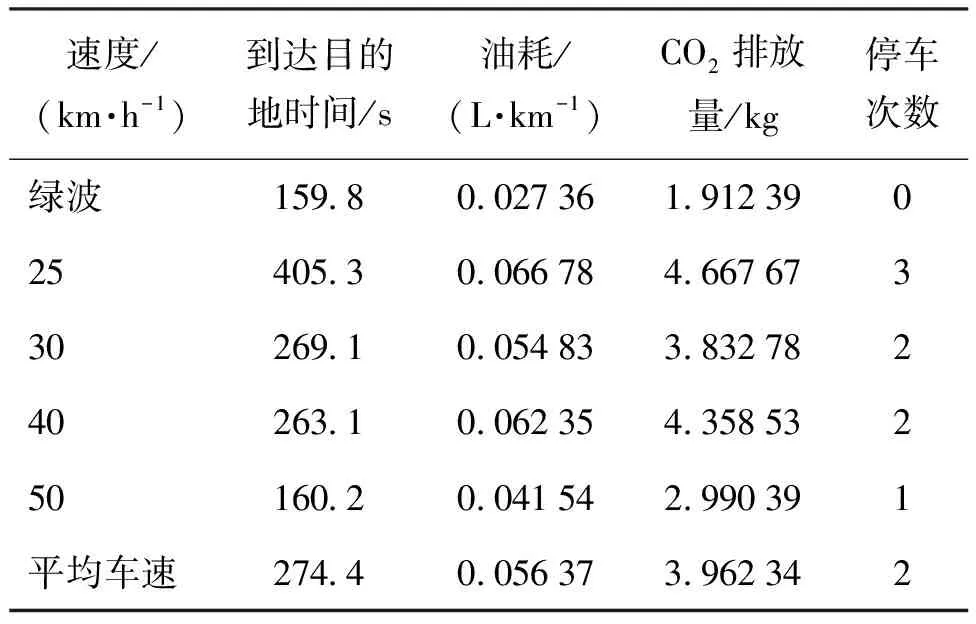
表1 Vissim仿真结果对比
3 结论
本文提出了1种面向出行路径的车辆绿波速度控制方法,解决交叉口车辆频繁启停导致交通运行效率降低和环境污染增加的问题。该方法在车路协同环境下,考虑交通状态和路径信息,为车辆提供全局最优速度建议,并动态更新,使车辆不停车经过路径上的所有交叉口到达目的地。相比现有方法,本文方法无需调整信号灯配时,车辆自主适应交通状态的变化,并考虑外部干扰因素的影响。
通过Vissim构建仿真路网,实验结果显示绿波速度控制车辆能显著减少交叉口停车次数,提高车辆通行效率超过40%,同时降低能源消耗和排放,使燃油消耗和CO2、VOC、NOx排放减少近50%。
本文实验数据的规模和范围有限,可能无法覆盖所有交通场景和条件。未来将进一步扩大实验数据集的规模,开展更多实地测试,验证方法的适用性和可靠性。
