三维激光扫描技术在地下人防工程中的应用
2023-09-27王雨欣孟丽媛陈昱璇王梦悦
王雨欣,孟丽媛,2,3*,陈昱璇,王梦悦
(1.宿迁学院建筑工程学院,江苏 宿迁 223600;2.武汉大学测绘学院,武汉 430000;3.城市空间信息工程北京市重点实验室,北京 100000)
由于地下工程具有空间密闭、复杂、面积大和场景重复率高等特点,使用传统的全站仪数字测图方式进行平面图测量,工作量大,且容易出错,难以保证测量精度[3]。因此本文探索了一种利用三维激光扫描获取地下人防地形图和三维模型的方法。
1 三维激光扫描技术数据获取与处理
三维激光扫描技术开始于20 世纪90 年代中期,由于其能够高精度快速地获得测量目标的三维信息,被称为实景复制技术[4]。三维激光扫描所获取的目标物表面和大面积地形的三维数据,称为点云数据,该数据可以通过计算机采用专门的处理软件进行读取和处理[5]。三维点云数据具有密度高、精度高、数据量大和带有扫描物体光学特征信息等特点。相较于其他方法,基于三维点云数据构建的三维模型精度更高、细节更加逼真,与实物比例一致,场景三维可视化效果更真实[6]。三维激光扫描技术以其高速度、高精度、非接触及强适应性等特点被广泛应用于测绘工程、建筑古迹保护、结构测量和紧急服务等领域[7-11]。
地下人防工程三维激光扫描测量的主要流程如图1 所示,包括测区踏勘与方案设计、控制点布设、三维点云数据采集、点云数据处理和成果导出步骤。
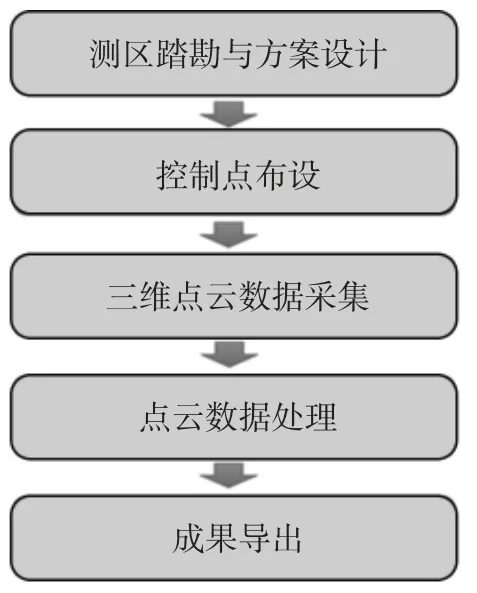
图1 地下人防工程三维激光扫描流程
1.1 测区踏勘与方案设计
在作业前,首先需进行测区踏勘。其目的是了解测量需求和测区基本情况,确定扫描方案。
本项目需要将地上地下坐标基准进行统一,以实现地上地下空间一体化管理。经踏勘,本文所测量的地下人防工程地上出口附近有3 个控制点,可用于地上地下坐标基准的统一。该工程面积约为100 m2,主体结构简单,但内部包含一些错综复杂小房间,为了兼顾测量效率和正确性,采用无靶球的作业方式,但在复杂小房间处增加测量的点云重叠度,并绘制草图。
根据现场的踏勘情况初步完成了控制点和测站数量与位置的设计。
1.2 控制点布设
本文在地下空间均匀布设5 个控制点备用,控制点分布情况如图2 所示,图中地形点即为控制点。使用全站仪导线测量方式对地上已知控制点与地下控制点进行联测,得到5 个地下控制点坐标。
式中,i∈[1,m],j∈[1,n];DSem(mr,mp)表示QoS数值相似度函数;mr表示服务请求者请求的QoS数值约束;mp表示服务提供者提供的QoS数值约束;rj表示服务请求者所请求的第j个QoS属性参数的取值;qij表示第i个候选Web服务中的第j个QoS属性参数的取值。

图2 控制点及测站分布
1.3 三维点云数据采集
数据采集使用的仪器为Trimble TX8 三维激光扫描仪,该型号扫描仪在测量速度、测程和精度等方面表现优异,被广泛应用于工业测量、工程测量等领域,其主要技术参数见表1。
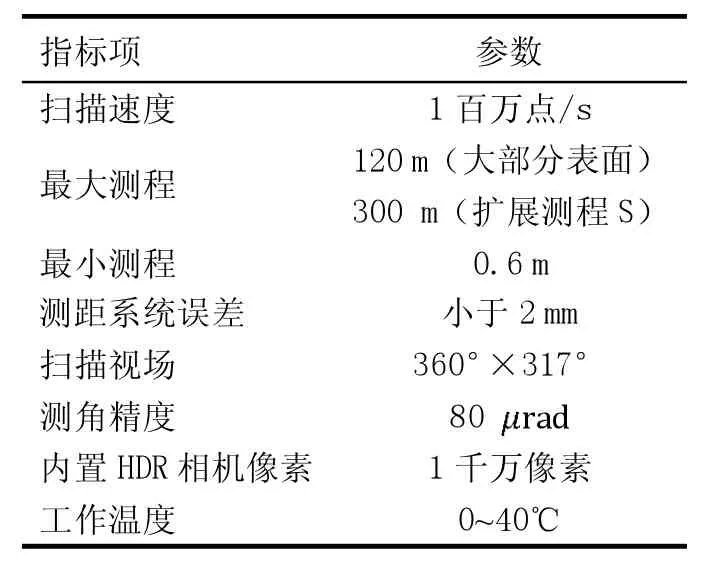
表1 Trimble TX8 三维激光扫描仪技术参数
三维点云数据采集的过程包括测站布设(首站整平)、扫描与搬站。测量时应注意避开遮挡物,仪器开始工作后人员要避免在扫描仪扫描区域内移动,以免对扫描数据造成影响。在第一个测站测量结束,仪器搬至第二测站,第二测站与第一测站应存在重复扫描区域。重复操作,直至扫描结束。
根据地下人防工程结构特点,共扫描74 站,测站分布情况如图2 所示,其中三角形为测站。图中仅显示匹配成功的测站。
1.4 点云数据处理
本文使用的数据处理软件为Trimble RealWorks 12.0 数据处理软件,该软件具备大量的配准工具可以快速配准工程和分析结果,并且可以识别出单独点云对象中的点云分类与分割,很好地支持本文的数据处理。
由三维激光扫描仪直接获取的点云数据数量庞大、密度高且存在很多无效点云,因此需对其进行预处理,主要流程包括点云去噪、修补、配准等[12]。
本项目的地下人防工程点云数据处理流程主要步骤包括点云配准、地理坐标转换、点云分割和输出结果等。
1.4.1 点云配准
由于地下空间面积大且结构单一,整体进行全自动配准会发生错误,从而产生“点云分层”,因此在进行一次全自动配准后,根据测站分布情况,将测区测站分为3 组,分别进行配准,得到3 组精确配准的点云后,再将3 组点云进行整体配准,这种方法有效避免了全自动配准产生的错误。配准结果如图3 所示。

图3 点云配准结果
1.4.2 地理坐标转换
三维激光扫描的坐标系为测站坐标系,要想实现地上地下空间一体化,需要对其进行地理坐标转换。利用控制点将三维激光扫描点云坐标转换至项目所需坐标系下。本文利用3 个控制点(图2 中的地形点1、2、4)对其坐标进行转换,需要注意由于三维激光扫描坐标系为右手系,而导线测量的控制点所使用的坐标系为高斯平面坐标系,为左手系,因此需要将高斯坐标系的X、Y 坐标进行互换,转换为右手系。转换后的点云如图4 所示,其轴系方向已经与该地下人防工程实际建设方向一致。转换后控制点点位残差为1.2 mm,利用地形点3 和5 作为检查点,坐标转换后两点的点位误差分别为1.3 mm 和0.7 mm,均满足1∶500 比例尺测图需求。
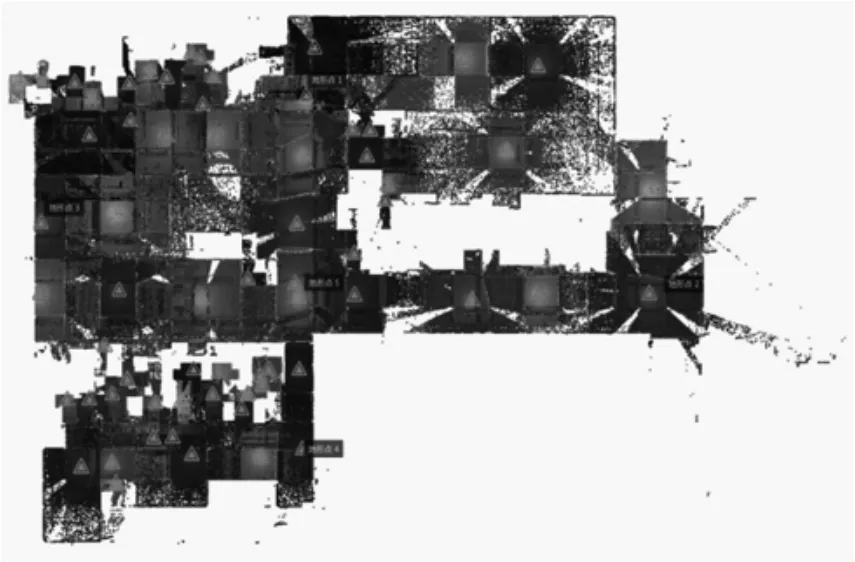
图4 地理坐标转换结果
1.4.3 点云分割
为了便于平面图的绘制,需要去掉配准结果点云的顶部和地面部分。分割后的点云依然存在一些杂乱的电线、现场堆放的杂物和其他不需要在平面图中体现的地物,如管道、消防栓等,为保证平面图绘制的精度和效率,需要对点云进行进一步编辑,删除不需要的干扰物,分割后的点云如图5 所示。
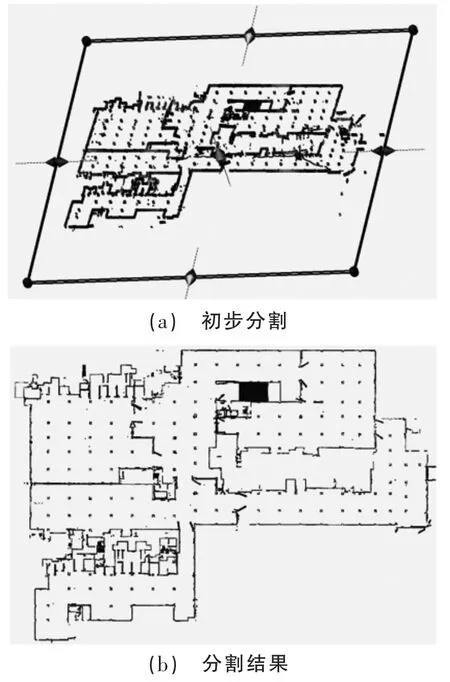
图5 点云分割结果
1.5 成果导出
为了绘制平面图和基于点云完成三维建模,需将点云导入AutoCAD 软件和Revit 绘制,因此将点云导出为可导入AutoCAD 和Revit 的rcp 格式。
2 基于三维点云的平面图绘制
将点云数据加载到AutoCAD 软件中,即可根据点云数据在AutoCAD 软件中绘制平面图。
在绘制好平面图初稿后,需对绘制的平面图进行检查。除对绘图质量的常规检查,还需对平面图与实地的相符情况进行检查,即需要持平面图到测量实地进行调绘,通过调绘可以发现三维激光扫描数据处理中产生的错误和被数据处理人员误删的重要测量目标。
本项目重点调绘内容有2 个。一是位于人防工程角落的隔间存在误匹配和匹配错误的情况。由于隔间结构复杂,面积狭小,使用皮尺对隔间区域进行了补测。二是位于内部分的墙面拐角不是90°,经现场核实,三维激光扫描数据无误。
根据调绘结果对平面图进行更改,结果如图6 所示。经检查,该平面图精度达到1∶500 地形图精度。对其进行整理,用于竣工检查和数据存档。
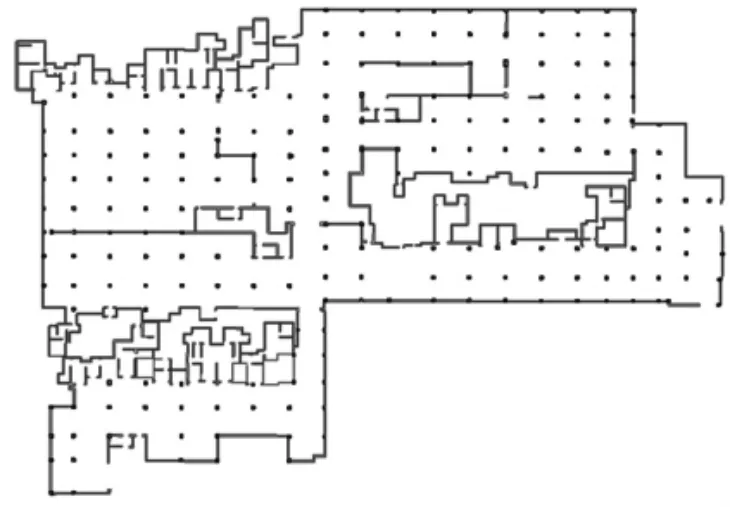
图6 地下人防平面图
3 基于三维点云的BIM 模型构建
将点云数据载入Revit 软件,即可基于三维点云完成BIM 模型的构建。首先进行标高的设置,设置完标高后,即可运用平面视图搭建墙体、防护门、柱子、楼板和人防专有设备等构件。在建立过程中可以实时点击三维视图查看自己建立的模型与点云模型的差别并进行调整,亦可在属性栏下的可见性/图形替换里将点云数据关闭查看整体建立情况。所构建的模型如图7 所示。
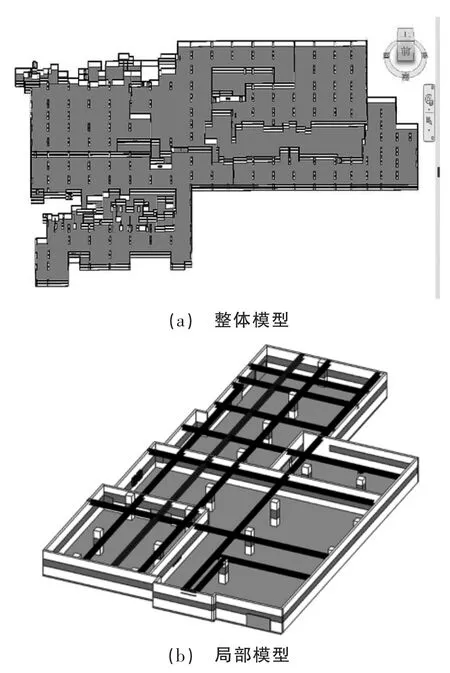
图7 地下人防三维模型
在模型中测量10 段距离,与实地测量距离比较,依次评价建模精度。计算得到距离中误差为±0.146 m。经比较,精度合格标准参考CH/T 9015—2012《三维地理信息模型数据产品规范》[13]中Ⅱ级的三维模型精度要求。
4 结束语
本文利用三维激光扫描技术获取地下人防空间初始点云数据,并基于点云处理结果完成了对地下人防控制平面图和BIM 模型的生产,且成图精度满足测量要求,数据可用于竣工交付和数据存档。本文方法内外业共耗时13 h,2 人即可完成地下人防工程测量的全部工作,大大提高了测量效率,为相关测量工作提供了解决方案,具有实际意义和参考价值。
