空地协同测绘技术在历史建筑数字测绘建档中的应用
2023-09-27梁芳
梁 芳
(山东衡坤信息科技有限公司,山东 聊城 252000)
历史建筑承载着地区的独特风貌和历史底蕴,体现着中国传统社会的文化精神,具有极高艺术价值,是宝贵的不可再生资源,近年来中央陆续发布了一系列关于文化遗产保护的相关文件。基于历史和现实的需要,文化遗产的数字化保护备受我国社会和学界关注。
历史建筑的外在形态和结构复杂,传统测绘方法普遍存在工作量大、精度低、仿真效果差和记录不全面等局限,且测量过程中有损坏文物的隐患,难以满足当代历史建筑测绘的需求。无人机倾斜摄影结合地面三维激光扫描的空地协同测绘技术有着显著优势:可以高效、非接触地获取数据,全方位留存与展示历史建筑的建筑样式、风格特色、色彩纹理及空间位置等信息;适用于单个历史建筑或历史建筑群及街区的测绘作业,能够完成全面精细的历史建筑数字测绘建档工作,有利于历史建筑的修缮复建、活化利用和数字化保护,在历史建筑的文化记录传播和智慧城市开发等领域都具有重要的意义。
1 空地协同测绘技术
1.1 技术概述
本文所述空地协同测绘技术是指以无人机倾斜摄影和地面三维激光扫描为核心的复合型数字测绘技术,二者相辅相成,优势互补。其中,无人机倾斜摄影长于实时高效拍摄历史建筑的顶部和侧面区域,弥补三维激光扫描因大入射角而产生顶部区域点云漏洞和稀疏问题,其目标是拍摄历史建筑不同高度、角度的高分辨率影像,快速获取丰富的地物数据信息;地面三维激光扫描长于精准扫描历史建筑室内、室外等近地面区域,弥补了倾斜摄影因视角盲区而造成近地面点云模糊和拉花问题。其目标是细致扫描获取历史建筑精准的空间位置、外部特征、纹理细节等信息。
1.2 技术路线
本文所述空地协同测绘技术对历史建筑的数字测绘建档工作,包括数据采集、数据处理和多源点云融合、实景三维建模两部分。第一,数据采集和数据处理,一方面是无人机倾斜摄影。①影像数据采集。根据测区情况设置参数并规划航线,采用无人机自动飞行结合人工操控飞行实时全面地采集影像数据;②多视角影像处理。通过空三测量和密集点云匹配等完成多视角影像处理。另一方面是地面三维激光扫描。①点云数据采集。勘察测区后设置参数、布站扫描,采集高质量点云数据并预检;②点云数据处理。经过点云降噪等预处理、点云拼接和基于特征点的点云配准,生成高精度融合点云。第二,多源点云融合和实景三维建模。一方面是多源点云融合。将2 种点云数据统一点云格式,基于同名区域的同名特征点,完成多源点云的配准融合。另一方面是实景三维建模。将融合点云导入软件,生成TIN 三角网格,构建白模并纹理映射,生成全面真实的的实景三维模型。总体技术流程如图1 所示。

图1 总体技术流程图
2 无人机倾斜摄影测量技术
无人机倾斜摄影测量技术是指利用无人机搭载高分辨率相机多角度、全方位拍摄影像,提取高精度密集点云数据,构建实景三维模型的技术。该技术能真实还原历史建筑的空间位置、外部特征、纹理材质等信息,局部细节可达毫米级,实现历史建筑影视级展示效果,自动化作业有效提高作业效率,降低人力物力成本。
2.1 影像数据采集
本研究采用ZR-M66 六旋翼无人机搭载单镜头像素高于2 400 万,图像分辨率4.0 μm 的相机,借助定位精度可达厘米级的GPS-RTK 技术对历史建筑从垂直、前后、侧面等多个视角、不同距离自动进行影像数据的采集。第一,规划航线,自动飞行。作业人员需现场勘察历史建筑及周边的飞行环境。根据实际情况,运用专业飞控软件规划航线,布设像控点,设置安全距离、飞行高度和速度、航向和旁向重叠度、拍摄间隔等各项参数。执行测试飞行,结合测飞反馈及时调整计划。本研究设置无人机飞行高度为100 m,航线和旁向重叠度不低于70%,安全距离在20~40 m,无人机按照航线规划自动采集影像数据;第二,人工操控飞行。自动飞行因拍摄视角在屋檐、树木遮挡和建筑间距离较窄等局部区域会出现拍摄盲区,导致采集数据的缺失,故测绘人员需要手动操控无人机近距离多视角拍摄该区域,补充缺失的局部影像。结合2 种方式采集影像数据,确保飞行记录的完整,显著提高采集数据的精确性和完整性。当作业中出现相对误差和绝对漏洞时,务必及时补充拍摄并尽量使采集参数同上次作业一致;拍摄历史建筑表面的凸起、镂空等位置时,需多角度拍摄并适当增加重叠率。
2.2 多视角影像处理
将采集的影像数据导入地面工作站,以历史建筑的几何中心为坐标原点建立ENU 坐标系,运用专业软件对影像数据进行局域网平差、整体优化平差完成空三测量,再通过同名特征点的密集匹配生成高密度点云数据。第一,空中三角测量。将POS 数据结合地面控制点进行空三加密计算,求出历史建筑全部影像的内方位元素和加密点的地面坐标。因所采集影像存在拍摄视角和尺度不统一等问题,影响空三解算的准确率。故需要将多视角影像数据分组后,分别运用Context Capture Center 软件进行自动化空三测量,采用光束法对垂直、倾斜影像进行局域网平差解算,再将各组数据合并后整体匹配、优化平差,若融合点云出现分层,需增设连接点再次进行空三解算,直至生成融合点云数据,空三测量误差应控制在0.5 像素以内。第二,密集点云匹配。运用专业软件采用同名特征点匹配法,计算相关参数,自动完成影像同名特征点的密集匹配,对整体点云数据进行优化平差、降噪等处理,生成真实影像的高密度点云,精确获取历史建筑的空间位置和外形姿态等信息,点云融合过程中产生的误差需在1 cm 以内。该处理全程自动化,对算力的需求极高,需要通过多处理器并行处理技术加快运算速度。
3 地面三维激光扫描技术
地面三维激光扫描技术又称实景复制技术,主要由激光测距仪和激光扫描系统组成,能够通过发射脉冲激光至历史建筑并回收反射信息,测量两点间激光传输的时间差或者相位移动值自动解算求得被测点上的相对三维坐标间距[1]。该技术真实精准、时效性好、自动化程度高,能够大幅提高作业的效率和精度,提供真三维、真尺寸、真纹理的数字化模型[2]。
3.1 点云数据采集
本研究采用天宝TX8 三维激光扫描仪非接触式进行数据采集,连续批量获取历史建筑的空间数据。基于历史建筑的不同区域(室内、室外、周围环境)对采集数据的不同要求,综合选用了中精度(10 m 处点间距6 mm)和高精度(10 m 处点间距3 mm)2 种扫描方式。作业顺序按照环绕历史建筑的外壁到室内的顺序依次布站扫描。第一,测站布设。首先,需进行现场堪察,了解测区环境和历史建筑的空间分布情况,分析数字化条件,合理估算需布设测站的数量和位置,设计布设方案,使分散且无死角的多个测站构成闭合环形控制网。然后,测点需布设在稳固、开阔且具备良好通视条件的位置(如路径转折点);测站之间的距离控制在25~30 m。在室内结构较复杂区域测站间距应控制在5 m 以内;在视野受限区域应适当增加测站数量、缩短测站间距,消除扫描盲点。最后,在正式作业前需进行小范围的预扫描作业,及时校正测点布设方案。第二,数据采集。把三维激光扫描仪架设在测站上,调整姿态到合适位置,进行细致的实时校准并设置参数(扫描历史建筑物时分辨率参数设为1/5;扫描测区环境和院落场景时分辨率参数设为1/8),检查测区范围是否无误,逐个测站进行精细扫描,获取历史建筑高精度完整的三维点云数据。第三,点云预检。每个测站完成扫描后,需要预检查所采集的点云数据,对遮挡、新增等造成的数据遗漏及时调绘、补测,对点云实时拼接错误等情况及时调修,确保点云数据采集的精确性和完整性。
3.2 点云数据处理
三维激光扫描布设测站数量多、采集点云数据量庞大,需采用Cyclone 专业软件自动完成点云降噪、拼接、配准和融合等处理,生成高精度、高还原性融合点云数据。第一,点云预处理。获取的点云数据中因遮挡或自身反射不均匀等因素生成的冗余和无效数据,需采用针对性过滤算法对该数据做降噪、删除等预处理,剔除干扰因素后再进行点云拼接配准。第二,点云拼接。将预处理后的点云数据导入专业处理软件中,自动完成点云拼接,借助VIS 视觉追踪点云预拼情况,检查各测站之间的连接强度,对于连接强度不达标或错误的需人工手动完成视图拼接,及时调修拼接错误的部位。第三,点云配准。运用专业软件采用特征点配准法完成点云数据的整体匹配、优化平差,自动将点云数据配准至对应的控制网坐标系中,对于无法精准确定的特征点需人工手动配准,得到密集匹配的点云数据。配准后点云之间误差不得超过1 mm,测站之间配准误差不得超过2 mm,满足历史建筑的测绘精度要求。第四,点云融合。将已配准的点云数据由多站分离统一为单一站点,完成点云数据的融合。受点云数据自身离散分布的影响,部分模型仍有漏洞等缺陷,无法进行全自动网格修补,需采用线性插值法或二次曲面插值法进行修复。再对点云数据整体过滤、降噪处理,消除历史建筑物之外的无关噪点(树木、移动车辆)和冗余地物的数据,凸显目标建筑,确保数据的精确性。完成以上作业后,将融合点云数据输出为ptx、las 等格式。
4 多源点云数据融合,精细化建模
无人机倾斜摄影能够全天候、广视角实时高效空中拍摄,但建筑物室内、近地面和狭窄区域等盲区易出现点云拉花、破洞的“顶好底差”问题;地面三维激光扫描精度高、无接触作业,但建筑物顶部和遮挡等视角盲区会出现点云缺失、纹理细节粗糙等“底好顶差”的问题。
4.1 多源点云数据融合
由于历史建筑形态复杂、特征突出,基于2种技术的不同原理获取的点云数据包含多个坐标系,点云密度和尺寸规格不尽相同,有效重叠区域较少,所以多源点云数据融合适宜采用特征点配准法。该方法能将数据统一点云格式,划分高精度同名区域并在其中提取同名特征点对,再对特征点对逐一进行匹配和参数计算,完成多源点云的配准融合。第一,统一点云格式。基于地面激光扫描的点云数据精度高,无人机倾斜摄影的点云数据完整性强,故以前者为目标点云,后者为补充,将两者统一为PCD格式点云数据,运用Cyclone专业软件对点云数据中畸变、冗余等数据进行再次删减、编辑、降噪等处理,提高点云配准效果。第二,选取高精度同名区域。选取重叠度高、特征显著的区域作为高精度同名区域,且同名区域均匀分布,若高精度同名区域的配准结果准确,则整体点云配准质量也较高。该方法在尽可能完整保留点云特征的同时,大幅缩减配准所需的点云量,显著提高配准效率并提升展示效果。第三,选取同名点对。所选同名点对的合适与否直接关系配准参数计算的准确性,由于2种点云数据模型的几何特征良好,在高精度同名区域内自动提取合适同名点对较为容易。若无法自动精准获取同名点对需人工选择或酌情添加点对数量,以提高整体配准的精度和效率。配准中所选取的点对必须特征突出(如独特结构的尖锐点、角点等),且均匀分布在不同平面区域,不可集中于单一狭小区域。第四,点云配准。运用奇异值分解(SVD)算法逐一计算同名点对参数的初值,再利用间接平差求出该参数的终值,完成多源点云的配准,生成多源融合点云数据。该方法的点云配准效率较高,且能够较为完整、详细地保留历史建筑的整体特征与纹理细节等信息。
4.2 精细化建模
将多源融合点云导入Context Capture 软件中,构建TIN 三角网格,生成白模模型,建模软件会按照从影像数据到点云数据的顺序分别对白模模型进行纹理映射,初步生成实景三维模型。该模型不免存在局部区域的建模漏洞、纹理残缺等问题,通过过滤、配准、删除等处理方式剔除冗余、畸变数据,修补模型漏洞。将该模型转换为obj 格式导入3D Max 软件中进行道路压平、纹理贴图和风格渲染等处理,对历史建筑的三维模型中立面花式透风砖、吻兽等细节再次优化处理,精度达到毫米级。最终构建真实精准、纹理丰富的实景三维模型,有利于历史建筑的全方位真实展示,为历史建筑数字测绘建档工作提供全面、高精度的基础数据。实景三维模型如图2 所示。
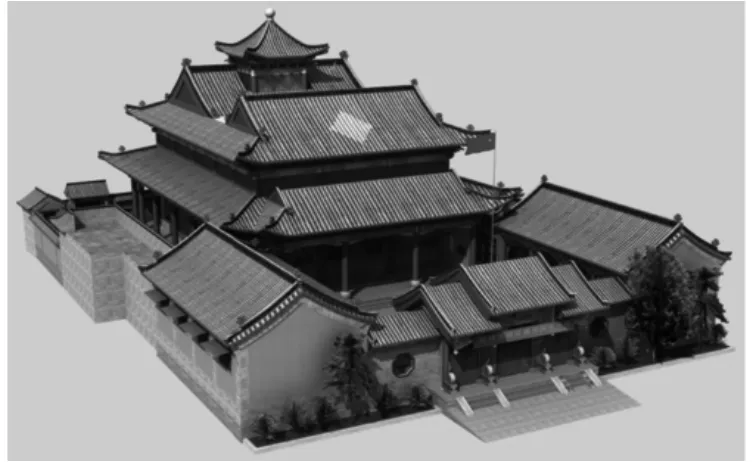
图2 实景三维模型图
5 结束语
我国的历史建筑是五千年中华文明的瑰宝,是区域的文脉传承,有着极高的文化内涵和艺术成就。但由于种种因素,很大一部分历史建筑保存现状堪忧,扎实迅速地开展历史建筑的数字化保护和数字测绘建档工作已经刻不容缓。作者结合实际历史建筑测绘建档工作,分析空地协同测绘技术的关键技术点和相关作业流程,以期为后续的历史建筑数字化保护提供有益的工作思路。
空地协同测绘技术将测绘精度提高到了毫米级,能够对历史建筑的存在状态、材质色彩、风化破损等给予完整全面的记录和展示;能够非接触、非解体地完成历史建筑的数字化重建,并通过学习计算补齐历史建筑的缺损,为后续的修缮和复建提供精准完备的数据支持;还能够借助高速互联网和虚拟现实技术,实现历史建筑的三维动态展示、虚拟漫游、数字孪生等诸多应用场景,延续和活化历史建筑的丰富文化内涵,有力推动历史建筑的全过程保护,实现我国传统文化的广域传播。未来,该方法在地质勘测、环境灾害监测、灾后救援和气象探测等领域也将发挥着积极作用。
