一种消能通道与过鱼通道独立的新式Tesla 阀鱼道及其水力特性研究
2023-09-22王元玖薛智博张春泽米家杉
王元玖,薛智博,张春泽,,米家杉,马 倩
(1. 重庆交通大学 西南水运工程科学研究所,重庆 400074; 2. 重庆交通大学 水利水运工程教育部重点实验室,重庆 400074;3. 交通运输部水运科学研究院,北京 100010; 4. 重庆西科水运工程咨询有限公司,重庆 400074)
0 引 言
在水资源开发过程中,人们在江河上修建了大量拦河建筑物,阻断了天然河流连通性。为保障河流生态的可持续发展,又设置各类过鱼设施,用以减缓拦河工程对鱼类溯洄的不利影响。要保障鱼类顺利上溯,过鱼设施至少应满足以下3点要求:首先,由于鱼类游泳能力的限制,过鱼设施中主通道允许最大流速不应超过鱼自身的极限游泳速度;另外,通道内应存在一个供鱼类休息调整的休憩区,该区流速不宜超过鱼类的感应流速;最后,通道内流态应尽量丰富多样,以满足不同鱼类的游泳偏好[1]。总体来看,无论传统工程鱼道,还是各类新型仿自然(仿生态)鱼道,都是满足上述要求的基础上再兼具各自特点。
对于传统鱼道的代表,竖缝式鱼道中主流大体居中,其流速从中心线到两侧递减,纵向衰减明显,回流区分布在主流两侧,流速值较小,可作为休息区,空间占比大[3]。相比较于传统工程鱼道,仿生态鱼道能够形成鱼类更为熟悉的接近天然河道的水流条件[4]。交错蛮石墙式仿自然鱼道[5]采用天然砂、砾石对底破进行加糙,采用天然蛮石建造挡墙,该结构单级池室中主流有先减小再增大的趋势,最大流速出现在长蛮石墙附近,休息区存在于主流两侧,该区域紊动能较弱。将仿生态鱼道与孔缝相组合,在此结构中流态表现良好,整体紊动能不大,底孔和竖缝处最大流速基本保持一致,基本满足过鱼需求,底孔的存在为中底层鱼类增加了上溯路径,可有效提高过鱼效率[6]。李广宁等[7]采用挺水植物构建了一种新型仿自然鱼道,植物模块交错布置,水流流态丰富,过鱼通道流速能够得到有效控制,植物布置区下游可作为休息区。郄志红等[8]提出了一种利用太极圆盘和爻条削减水流能量的太极式新型鱼道,在此基础上接着又提出了旋流式鱼道[9],利用导流坎引导水流与弧形壁面在池室内形成旋流,水流相互碰撞摩擦消能,进而实现降低过鱼通道流速的目的。
Tesla阀[10]是一种被动式流体控制装置,由重复的弯道和直道构成[见图1(a)],流体从阀门不同端口流入,流动将会呈现完全不同的规律,此现象即被称为Tesla阀的单向流通性。当流体反向流入时,被划分为两股,两股流体在导流柱末端相互摩擦碰撞进行消能,致使流体流速大大削弱;当流体正向流入时,流动畅通无阻,流速被提升。Tesla阀由于其特殊的结构和控制流动特性,在微流体控制、微机电系统等领域得到广泛应用,然而在大尺度上,Tesla 阀的单向流通特性也可被应用于鱼道设计。2016 年,K Keizer[11]就大型Tesla 阀用作鱼道的可行性进行探讨,分析了该结构的池室流动规律和水动力特征,认为大尺度Tesla 阀在适宜的流量-比降的组合工况下,可用作过鱼设施。随后,Blotnicki J等[12]将大型Tesla阀的结构进行修改,将原有Tesla阀的倾斜边壁改为顺直边壁,研究结果表明新结构存在着池室流速过高、消能效率低的问题。将Tesla 阀应用于鱼道中,不应仅仅考虑消能效率,还需考虑鱼类的上溯适宜条件,上溯过程中需找寻适宜的休息区域恢复体能,休息区域的流速不宜大于鱼类的感应流速(一般为0.2 m/s)。然而,在较大比降条件下,原Tesla 阀鱼道形成的流场中顺直道流速湍急,且难以提供充足且稳定的休息区,故本文通过调整池室直/弯道宽度比,镂空导流柱并增加开口端长度等措施对原结构(如图1所示)进行了优化。通过三维数值方法对二者进行了模拟比较,分析了新方案(新式Tesla阀鱼道)的水流特征和作为鱼道的条件符合性。

图1 Tesla阀鱼道和新式Tesla阀鱼道结构示意图Fig.1 Structural schematic diagram of Tesla valve fishway and new Tesla valve fishway
1 数学模型及验证
1.1 控制方程
采用Flow-3D 软件对模型进行计算,Flow-3D 将连续性方程和不可压缩黏性流体运动的Navier-Stokes 方程作为控制方程,采用模拟在高应变率的紊流运动中较为准确的RNGk-ε湍流模型,该模型主要控制方程有连续方程、动量方程、紊动能k方程,紊动耗散率ε方程。
连续方程:
动量方程:
紊动能k方程:
紊动耗散率ε方程:
式中:t为时间,s;ui为时均速度分量,m/s;xj为坐标分量,m;ρ为密度,kg/m3;μ为分子黏性系数;p为压强,Pa;μt为紊流黏性系数;αk和αε分别为k和ε的湍流普朗特数;Gk为紊动能产生项,。
1.2 边界条件及网格划分
根据鱼道设计准则确定新式Tesla阀鱼道的几何设计参数,总长为26 m,宽为3.13 m,池室级数为6 级,结构整体比降为1%、1.5%、2%、2.5%和3%。计算区域进出口均设置为压力边界条件,相对压力为0,水深为1.0 m,由于自由表面为水体与大气的交界面,故计算区域的上部设定位压力边界条件,相对压力为0,水相占比为0,壁面为无滑移壁面条件,暂不考虑糙率影响。
采用正六面体结构网格进行网格划分,x、y、z方向的单元网格尺寸均取为0.06 m,总网格单元数约为145 万,网格划分见图2。

图2 网格划分示意图Fig.2 Schematic diagram of grid generation
1.3 验 证
首先对原大尺度Tesla阀鱼道进行数值模拟,并与文献[11]中物理模型实验成果进行对比验证,确定网格划分尺度和边界设置的适用性。通过对比各级池室的特征点监测水深(如图3),可知计算值与实验成果吻合良好,说明数值模型的可靠性能够满足研究需求。

图3 计算值与测量值对比图Fig.3 Comparison between calculated and measured values
2 结果与分析
2.1 优化效果比较分析
为了深入对比优化方案与原Tesla阀鱼道的相关水力特性,分别针对两种结构开展5种典型工况的模拟和分析。为避免边界效应的影响,仅在表1中展示第3、4级池室中的结果。
总体来看,新方案与原Tesla阀鱼道最显著的区别是休息区面积大幅提升。随着鱼道比降增加,两种结构内休息区面积均单调减少。当鱼道比降超过2%时,原Tesla 阀鱼道池室内流速低于0.2 m/s 的区域已不足2%,无法保障上溯鱼类休憩空间。相比之下,即使在2%~3%的比降范围内,优化方案池室内休息区面积占比仍保持40.8%~25.8%。

表1 原Tesla阀鱼道A和新式Tesla阀鱼道B水力特性对比表Tab.1 Comparison of hydraulic characteristics between the original Tesla valve fishway A and the new Tesla valve fishway B
另外,新方案在保持了原Tesla 阀鱼道消能效率(由单位投影长度内水头损失表示)的同时,整个池室内紊动能和流速均较原方案更小。由流速矢量图(图4)可知,在原Tesla 阀鱼道中,潜在通路内形成了显著的高流速锁(即顺直道中流速大于鱼类极限游泳速度),阻断了鱼类上溯通道。而观察优化方案可知,其弯道内流速显著增加,而顺直道内流速显著减小,并且在镂空导流柱内形成了较大的休息区。这一成功的优化,使得弯、直道功能独立而互不干扰,分别起消能和过鱼作用。在后续文中,将弯道称为消能通道,将直道称为过鱼通道。如图4(b)所示,两级池室衔接段也是消能通道与过鱼通道的交叉区域,如果此处流速过高,将会阻碍鱼类上溯。

图4 第3、4级池室流速矢量对比图(比降2.0%)Fig.4 Comparison of flow velocity vectors in the 3rd and 4th stage tank chambers(Gradient of 2.0%)
2.2 优化方案池室内流速
以四大家鱼(青鱼、草鱼、鲢鱼、鳙鱼)为主要目标过鱼对象,其感应流速范围0.07~0.20 m/s,临界游泳速度0.50~1.12 m/s,极限游泳速度0.70~1.48 m/s[13]。在本文中,取过鱼对象的感应流速为0.2 m/s,极限游泳速度为1.3 m/s,即池室内供鱼类恢复体力的低流速区不宜大于0.2 m/s,通道内最大流速不宜超过1.3 m/s,适宜上溯流速范围则为0.2~1.3 m/s。
图5 为各级池室消能通道高流速区平均流速随比降变化图,消能通道内流速随着比降的增大而增加,首级与第2级池室内流速增涨率较大,而自3 级池室之后的流速增涨率趋缓。这一规律与原Tesla阀鱼道[11]中各级回路流速变化规律相符。

图5 各级池室消能通道高流速区平均流速变化图Fig.5 Variation pattern of average velocity at the high velocity zone of the energy dissipation channel in the each stage tank chambers
图6 给出了当优化方案底坡比降分为1.5%、2%和2.5%时第3、4 级池室流速云图。由于遮蔽作用,镂空导流柱内水体流速一直保持在0.2 m/s 以下,几乎不受鱼道比降变化影响,可以稳定地保障鱼类休息区面积,供上溯疲劳的鱼类短暂休息、恢复体能。在消能通道顶冲作用下,过鱼通道内流速整体较低,最大流速均发生在池室入口处与消能通道主流交叉段。消能通道内流速最大值出现在通道入口处,强烈的剪切作用及壁面摩擦是通道内主要的消能方式。

图6 新式Tesla阀鱼道第3、4级池室流速分布云图Fig.6 Cloud chart of flow velocity distribution in the 3rd and 4th stage tank chambers of the new Tesla valve fishway
为了确定优化方案的比降适用范围,在图7 展示了连续6级池室通道交叉区平均流速随比降变化曲线。由图7 可知,当鱼道比降增大到2.5%以上时,末级部分池室平均流速已超过目标鱼类的极限游泳速度,需要增加一段平坡休息室串联上下级池室。
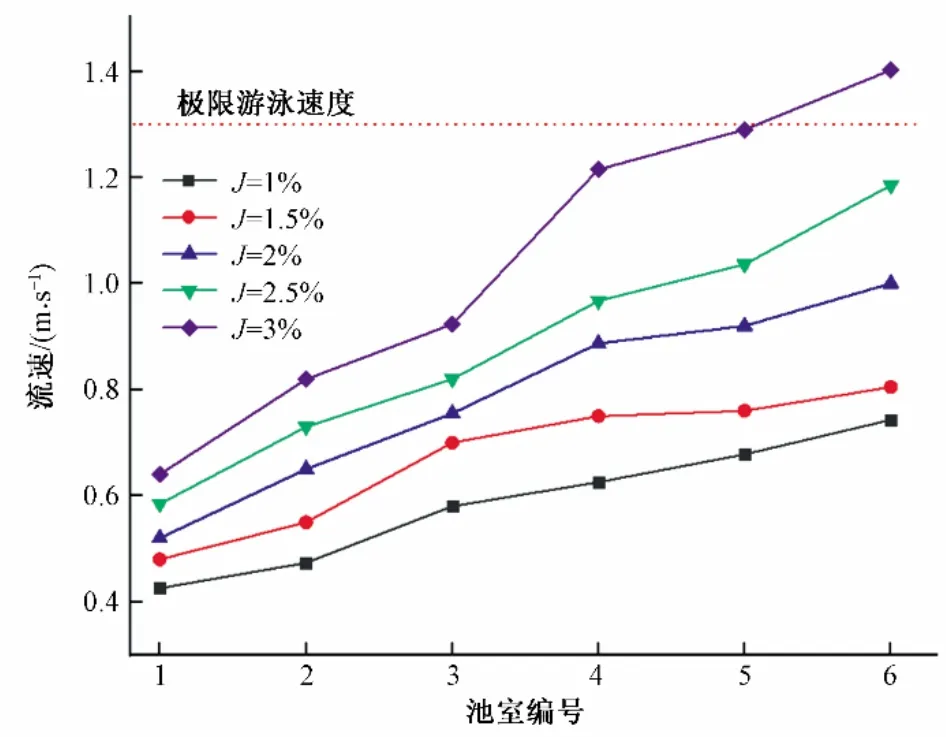
图7 各级池室通道交叉区平均流速变化图Fig.7 Variation pattern of average velocity at the intersection area between the energy dissipation channel and fish passageway in the each stage tank chambers
2.3 优化方案池室内紊动能
水流紊动能(Turbulent Kinetic Energy, TKE)是反映流体紊动的物理量,紊动能越大,水流湍动越剧烈,流体之间的相互碰撞产生的能量损失也越大[14]。鱼道中水流保持适当的紊动强度,一方面有利于鱼类感应主流位置,另一方面也有利于增加水体含氧量,维持水质指标。但水流的紊动程度与鱼类的游泳能力呈负相关[15],当鱼道内水流的紊动能过大时,鱼类则会因受力复杂及运动阻力增大而难以保持自身的平衡,不仅影响鱼类的运动能力,还有可能会对鱼体造成一定的损伤。
图8 为3、4 级池室的紊动能分布云图。随着比降的增大,池室紊动能呈整体上升趋势,根据文献资料[16],区分高低紊动能区的临界值为0.05 J/kg。当优化方案底坡比降低于2%时,池室紊动能均小于0.05 J/kg,休憩区紊动能小于0.01 J/kg;比降为2.5%时,池室进口处局部紊动能较大,最大约为0.13 J/kg,高紊动能区几乎封住了5 级池室入口。综合流速和紊动能变化规律,优化方案的底坡控制在2.5%以下,具有更好的上溯条件和经济性。

图8 紊动能分布云图Fig.8 Cloud chart of turbulent kinetic energy distribution
3 结 论
本文通过对原Tesla阀鱼道进行结构优化,得到了一种消能通道与过鱼通道相对独立的新式Tesla 阀鱼道。在针对上述两种结构开展CFD 数值实验的基础上,分析了新式鱼道的水力特性与适用范围,得出以下结论。
(1)在原Tesla 阀鱼道基础上,通过调整池室直/弯道宽度比,镂空导流柱并增加开口端长度等措施,得到一种消能通道与过鱼通道相对独立的新式鱼道方案。
(2)与原Tesla阀鱼道相比,新式Tesla阀鱼道在保证消能效率不变的前提下,有效改善了过鱼通道内流速、流态,显著提升了休憩区占比,增加了鱼类上溯成功的可能性。
(3)新式Tesla阀鱼道过鱼通道内流速随着比降的增大而增加,消能通道内首级与2级池室内最大流速增涨率较大,而相应3 级池室以下的最大流速增涨率趋缓。当鱼道底坡小于2.5%时,连续6级池室交叉区平均流速均小于鱼类上溯极限流速,经济性较高。
(4)当底坡比降低于2.5%时,新式Tesla阀鱼道过鱼通道内紊动能整体较低,对鱼类上溯是积极有益的。