信道复用技术在LED 水下可见光通信中的应用
2023-09-21彭嘉驰郭建中李燕龙张亮周英艾勇梁赫西
彭嘉驰,郭建中,李燕龙,张亮,周英,艾勇,梁赫西
(1.武汉纺织大学 电子与电气工程学院,湖北 武汉 430200;2.桂林电子科技大学 认知无线电与信息处理省部共建教育部重点实验室,广西 桂林 541004;3.武汉六博光电技术有限责任公司 光通信设备研发部,湖北 武汉 430072;4.湖北师范大学计算机与信息工程学院,湖北 黄石 435002)
引言
随着6G 时代的到来,其提出的空天海地一体化通信网络布局将逐渐形成,对水下无线通信(UWC)技术的传输速率、传输距离、通信质量等要求也越来越高[1]。
如今的水下通信方式可分为水下声波通信、水下无线电通信和水下可见光通信[2]。其中声波通信技术一直被认为是进行长距离通信最实用的方式,其传输距离甚至可达到上百公里[3];然而由于载波频率所限其存在着传输速率低的问题,仅为kbit/s 左右,所以声波信号在水下环境中面临着严重的传播延迟问题[4]。水下无线电通信主要以电磁波为载体,通信速率较声波高出数个量级,但其在水下环境中工作时会受到巨大的衰减作用,频率越高,衰减速度越快,即使工作在低频段通信距离也只有数米[5]。而相较于声波和射频,可见光在水下环境中有着高速率、低衰减、远距离通信等优势,其速率可达到Gbit/s,通信距离能到数百米,是一种新型水下通信技术,主要应用于水下潜航器之间的点对点通信或跨介质通信,应用场景如图1 所示。
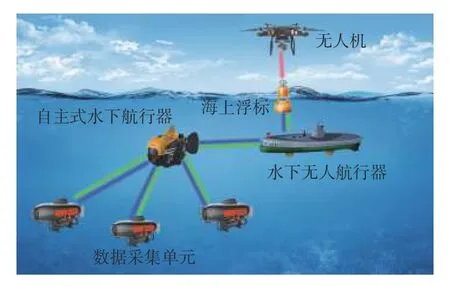
图1 UVLC 系统应用场景Fig.1 Application scenarios of UVLC system
2017年,敖珺等人设计了一个由12 个LED 组成的多孔径式发射系统,使用了视频压缩编码技术,在通信速率为10 Mbit/s,通信距离为10 m 的水下环境中实现了实时视频(RVC)数据流传输[6]。同年,JAMALI M V 等人为了缓解水下湍流信道引起的衰减效应,利用空间分集的方法设计了一套多信道UVLC 系统,在25 m 的水域中,通信BER为10-9时,其发射功率能得到大约8 dBm 的增益[7]。2019年,傅玉清等人提出了将多信道设计引入到UVLC 系统中,同时分析了不同信道数量的UVLC系统性能,结果表明,多信道UVLC 系统能获得更大的信道容量以及更稳定的通信性能[8]。2020年,ARVANITAKIS G N 等人设计了一个2×3 的多信道传输系统,其通信速率高达4.92 Gbit/s,且能进行通信距离为1.5 m 的稳定传输[9]。2021年,李金佳等人设计了一个发射端由6 个绿光LED 阵列,接收端由3 个光电倍增管(PMT)阵列组成的多信道UVLC 系统,在室内10 m 的水槽环境下进行测试,实现了速率为1Mbit/s 的数据传输[10]。2022年,陈晓等人提出并实现了一个2×2 的多信道UVLC系统,该系统能在50 m 长的水池中以233 Mbit/s的速率进行稳定传输[11]。
在UVLC 系统中,发射端的设计以LED 和激光(LD)为主,相较于LD 来说,LED 的发散特性使得系统在水下环境中工作时,抗环境干扰与抗水流扰动能力显著增强,且能解决光路不易对准的难题,大大降低了工作人员在水下环境中的操作难度[12];但同时带来的是光受水下环境衰减效应明显,光功率损耗较大,通信质量不佳,并且由于器件带宽的原因使得LED 的通信速率低于LD。为了提高LED-UVLC 系统的信道容量以及误码性能,本文设计了一种4×4 的多信道LED-UVLC 系统,并与传统的SISO-UVLC 系统进行对比分析,通过理论仿真和水下环境实验来验证信道复用技术对系统信道容量以及BER 性能增益。
1 系统设计
图2 给出了系统的设计框图,整套系统的数据由上位机发送,通过以太网用户数据报协议(UDP)与FPGA 进行交互,FPGA 将接收到的UDP 数据包解析出有效数据并进行寄存,在同步时钟的作用下通过并串转换将有效数据转换成4 路比特流信号,发射端使用不归零开关键控(NRZ-OOK)调制的方法将比特流信号加载到蓝绿LED 发射阵列上。对于接收端,APD 分别将接收到的4 路光信号转换成电流信号,通过跨阻放大器(TIA)和低压晶体管-晶体管逻辑(LVTTL)判决将信号进行整流并行发送给FPGA 处理。同时FPGA 将收到的信号进行串并转换,通过UDP 协议发送给上位机。
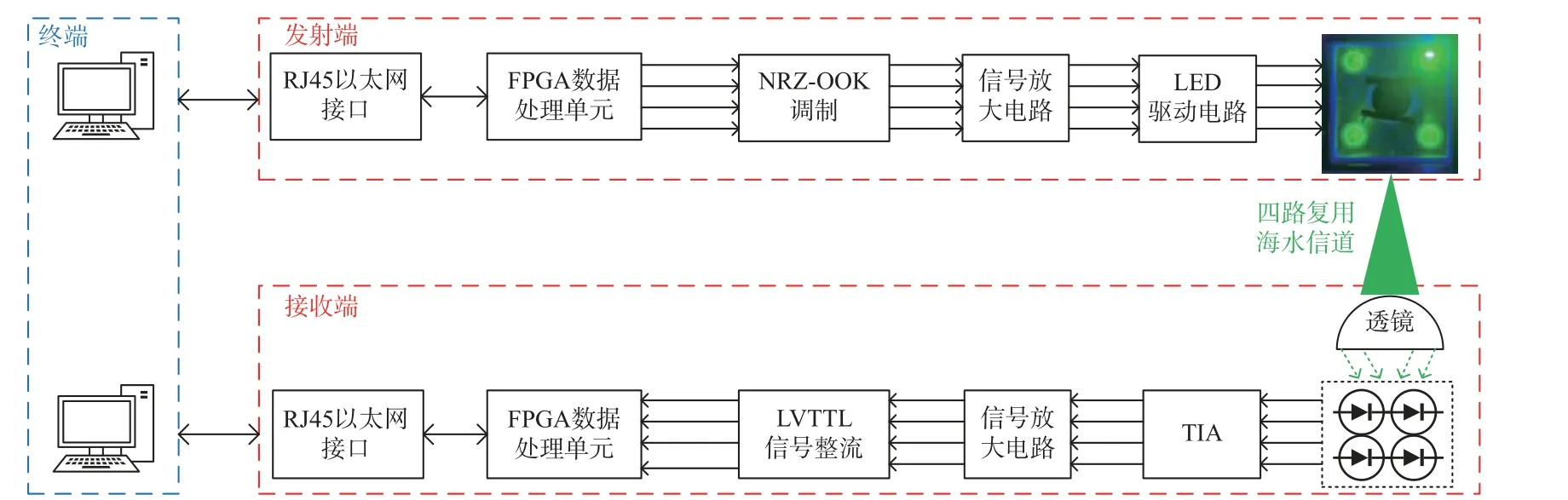
图2 系统设计流程图Fig.2 Flow chart of system design
2 水下光信道分析
2.1 海水的光学特性
光在水下环境中会受到理化因素的影响导致衰减效应,最主要的衰减效应为海水对光的吸收和散射效应,它们是由环境中的纯水、叶绿素、溶解有机物、悬浮颗粒物这4 类物质的共同作用而构成[13],如图3 所示。其中纯水指海水中水和无机盐的混合物,叶绿素为水中绿色藻类物质的成分,另外水中的生物在死亡后经过长时间的沉淀会被分解为溶解有机物和大小不同的悬浮颗粒物,它们均会对不同波段的光产生吸收和衰减效应[14-15]。
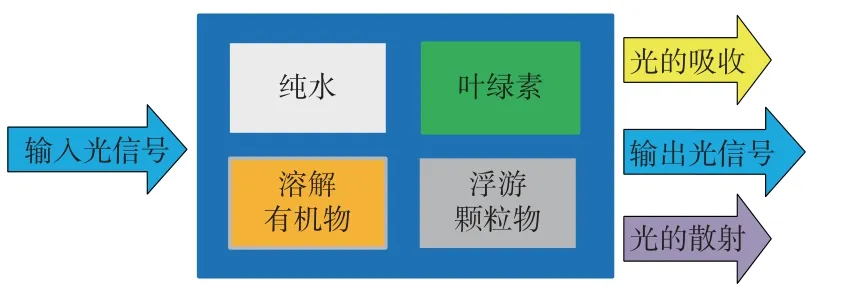
图3 海水的光学特性Fig.3 Optical properties of seawater
2.2 光在水下环境中的衰减
水下环境的总衰减系数K(λ)由式(1)给出[16]:
式中A(λ)和B(λ)分别表示水下环境对光的总吸收系数和总散射系数。
式中Ah2o(λ)、Ac(λ)、Acdom(λ)、Asmp(λ)分别对应纯水、叶绿素、溶解有机物、悬浮颗粒物对不同波段光的吸收系数。
式中:Bh2o(λ)、Bc(λ)、Bsmp(λ)分别对应纯水、叶绿素、悬浮颗粒物对光的散射系数;Csmp为海水中悬浮颗粒物的浓度。
首先分析光在海水中的吸收效应,纯水和叶绿素对不同波段光的吸收系数如图4 所示。吸收系数越大意味着它们对光的作用越强,导致光能量吸收损耗的越多。从图4(a)可以看出,当光波段在340 nm~600 nm 之间时,纯水对光的吸收效应最小;从图4(b)中可以看出,叶绿素对波段在600 nm附近的光源所产生的吸收效应最小。
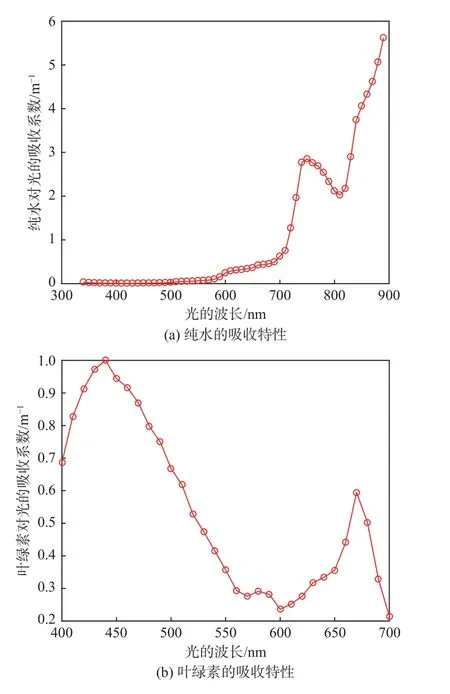
图4 纯水和叶绿素对不同波段光的吸收作用Fig.4 Absorption coefficient of pure water and chlorophyll for different optical wavelengths
溶解有机物和悬浮颗粒物的吸收系数由式(4)、式(5)给出[17]:
式中:A(·)表示不同波段 λ的光对应的吸收系数数值;λ0为标准参考波长;S为光谱曲线斜率。
海水对不同波段光的散射效应同样由上述4 类物质的共同作用产生,有研究表明,溶解有机物对光的散射作用较弱,与信道总衰减的相关性较低,在此不进行深入研究[18]。式(6)~式(8)总结出了对应的系数公式,他们均与波长呈反比例关系[19]:
式中:B(·)表示不同波段光λ对应的散射系数数值;λ0同样表示为标准参考波长;Cc为海水中叶绿素的浓度,不同的水域其对应的浓度也不同;Dsmp表示悬浮颗粒物的直径。
通过以上理论分析,表1 总结出部分地域海水的总衰减系数以及其对应的透光波长窗口值。从表1 中可以看出,不同类型的海水对光的总衰减不同,都有其对应的透光窗口波长。为使得信源光在传输过程中所受到的衰减最小,使得传输性能最佳,本文分别选取波长为450 nm 的蓝光和530 nm的绿光作为发射端的光源。

表1 各类型海水的透光窗口数值Table 1 Optical transmittance window coefficients of each type of seawater
3 通信性能分析
3.1 光链路模型
光链路模型决定光在水下信道中传输的方向性,合理的模型结构使得接收端所接收的光功率更大,传输距离更远[20]。由LED 构成的UVLC 系统发射端呈大范围扇形结构,接收端则由滤光系统、聚光系统、APD 光电探测阵列构成。滤光系统的作用是滤除有效波段以外的光信号,避免干扰。聚光系统使发射阵列每路信道的光能量通过透镜成像的原理汇聚为4 个等大且互不重叠的光斑。APD 阵列通过光纤与各信道光斑耦合,将对应的光信号转为电信号,送给数据处理模块,具体示意图如图5 所示,图中θ为光束发散半角,γ为通信链路偏角。
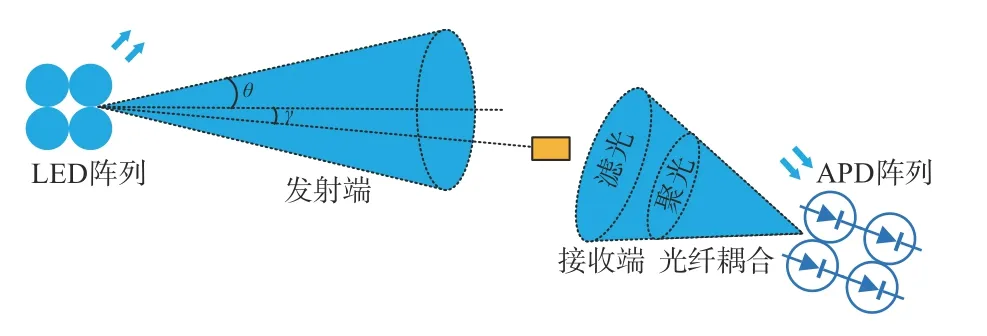
图5 光链路模型Fig.5 Optical link model
由总衰减系数K(λ)和光链路模型可表示出接收端光功率Pr的数学公式,如式(9)所示:
式中:Pt为系统发射功率;ηt为发射端光利用率;ηr为接收端光利用率;Sr为探测器光敏面面积;L为通信距离。在本系统中Pt=5.6 W,θ=0°,γ=3.04°,Sr=16π mm2,ηt=80%,ηr=60%。对衰减系数K(λ)分别为0.03、0.07、0.12、0.18、0.43 的5 种不同水质海水信道进行仿真分析,仿真结果如图6 所示。从图6 中可以看出,当通信距离一定时,衰减系数越大,接收光功率越小,误码率性能和通信质量越差。为有效解决衰减系数过大而导致通信质量不佳的问题,本文设计了多信道UVLC 系统来增强其抗衰减能力以获得更优的误码率性能。
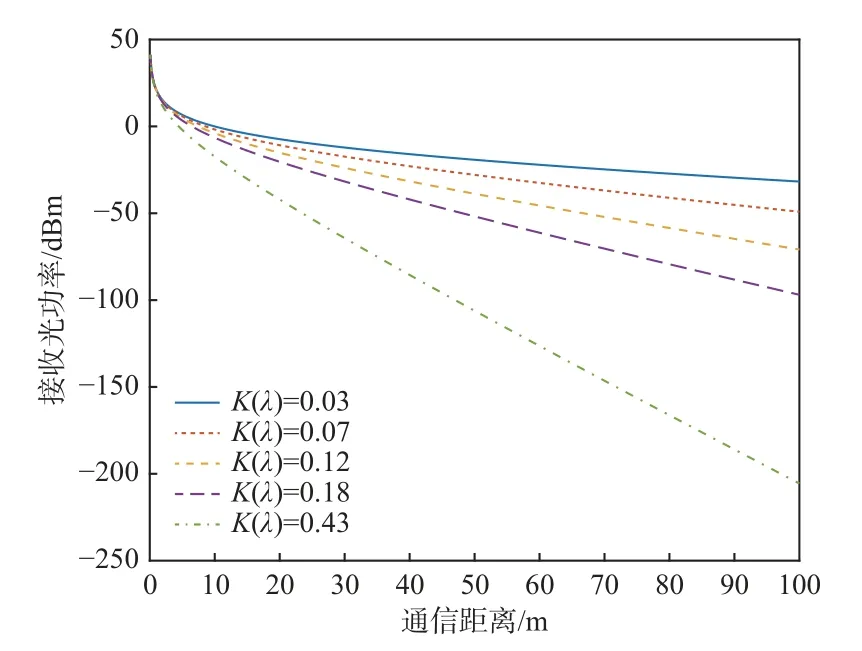
图6 接收端光功率仿真图Fig.6 Simulation diagram of receiver optical power
图7 模拟了近海和港口的水域环境且当总衰减系数K(λ)=0.43时,发射端由传统的单路LED 和4 路LED 构成的光功率分布图。从7(a)中可以看出,当系统为4 路LED 阵列时,传输过程中光功率衰减速度缓慢,传输末端光功率数值为2.1 dBm;而当发射端为单路LED时,在总衰减系数K(λ)不变的条件下,经过传输后,其末端光功率为0.9 dBm,如图7(b)所示。从仿真结果可知,多信道通信系统的设计能提升光能量的聚集性能,增加环境内有效信号的光束数量和光覆盖面积,从而能补偿LED 光源发散特性和水下环境衰减特性所带来的损耗,使系统的接收端能收到更大功率的光信号,优化系统的通信性能。
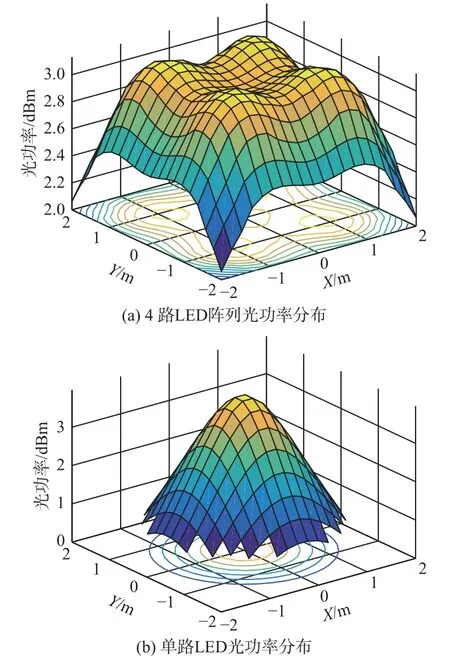
图7 水下环境内不同信道数量的光功率分布Fig.7 Optical power distribution with different number of channels in underwater environment
3.2 信道容量分析
多信道UVLC 系统的设计可提升信道容量。由于本系统各个信道状态已知,由香农公式出发,信道容量可推演成多个单输入单输出(SISO)系统的信道容量之和[21]。根据总衰减系数K(λ)计算出光电探测器阵列接收到的每路光功率Pr的大小,记为信道矩阵H,利用注水算法可求出各个信道的功率最优分配比,并计算出系统的最大互信息量。本系统的空间子信道在水下环境中相对独立、互不干扰,为非频率选择衰落信道,且发送端与接收端天线数量相等,系统的信道总容量为
式中:r为系统的信道数量;Es为系统的总发射能量;Nt为系统发射端天线数;N0为信道噪声功率;λi为信道矩阵H的奇异值分解(SVD)特征值;γi为每路信道上被分配的发射能量,通过上式可仿真出不同天线数量通信系统的最大信道容量,仿真结果如图8所示。分别对4×4、3×3、2×2以及SISO 的UVLC 系统进行容量仿真,从图8 中可以看出,信道容量大小与信道数量呈线性关系,且信噪比(SNR)越大,信道能容纳的有效数据量越多。
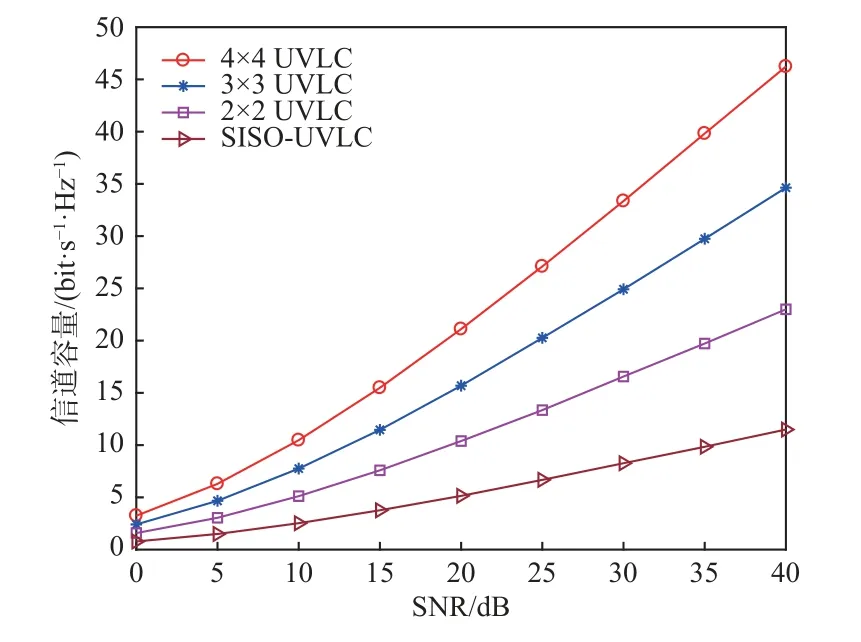
图8 UVLC 系统的信道容量仿真Fig.8 Channel capacity simulation of UVLC system
4 基于FPGA 的信号处理
4.1 UDP 通信协议的设计
UDP 协议为本套系统中上位机与FPGA 的交互方式,该协议是一种无连接的传输层协议,即不与通信接收方有握手等机制,故以通信效率高、占用资源少而著称,常用来传输音频、RVC 数据流、普通数据文件等[22]。图9 给出了UDP 协议的帧格式介绍,与FPGA 的交互主要是解析对方发送过来的UDP 数据包并将数据包中的有效数据段进行寄存、处理等过程。
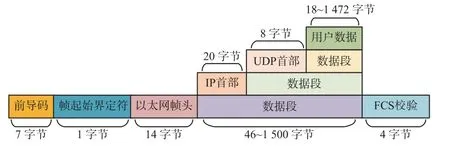
图9 UDP 帧格式Fig.9 UDP frame format diagram
4.2 数据处理与时序分析
数据处理部分为本设计的核心,系统同时拥有误码率测试和文件数据传输功能,图10 给出了具体的流程图。上位机将数据包通过UDP 协议发送给FPGA,FPGA 解析出数据包中的有效数据段,并通过插入帧头来标识出该数据段。因为上位机的数据传输速率远高于信道速率,故需要提前将有效数据进行缓存。之后数据将进行移位分离为4 路信号,分别进行8 b/10 b 编码的处理,其作用是为了防止出现较多的0 和1 使LED 灯出现闪烁的情况,影响LED 发射端的性能。最后将4 路有效数据通过并串转换发送给数据接收部分。接收部分原理类似,可以理解为数据发送的逆过程,主要对检测到的4 路信号进行串并转换、解码、检测帧头、数据移位拼接来完成。若检测到了帧头,那么此时FPGA 处于文件传输状态,FPGA 内部会通过UDP 协议将该数据返回给上位机。反之,FPGA 处于误码测试状态时,其传输比特流会由文件数据流切换为伪随机序列码,系统会根据检测到正确的伪随机序列码的个数分别来计算出每一路对应的BER值,并将BER值返回给上位机。
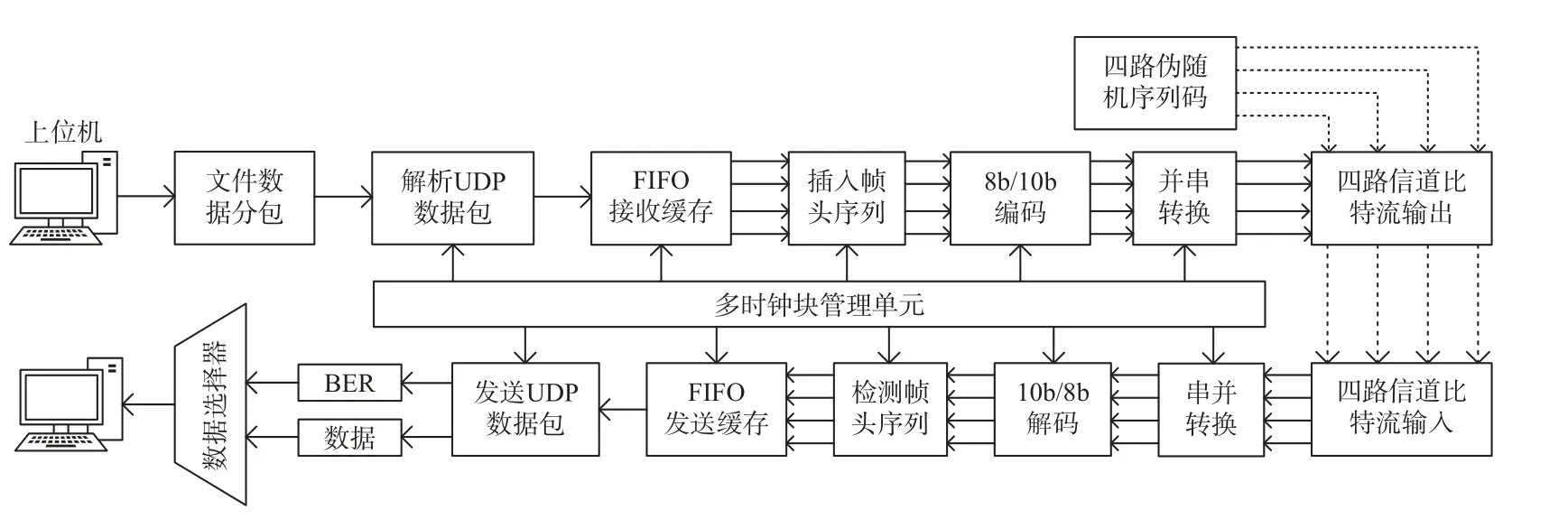
图10 FPGA 数据处理流程图Fig.10 Flow chart of FPGA data processing
5 系统测试
5.1 水下环境工程测试
图11 给出了系统在水下环境中测试的图片。图11(a)为通信质量测试,测试环境为长约50 m 的游泳池,将两套系统置于水下,分别测取接收端在不同通信距离时所对应的BER 数值;图11(b)为信道容量测试,测试环境为长约20 m 的自制水池,固定通信距离,全双工通信,当传输不同数据量大小文件时,记录两套设备所对应的通信时间,并计算出通信速率。
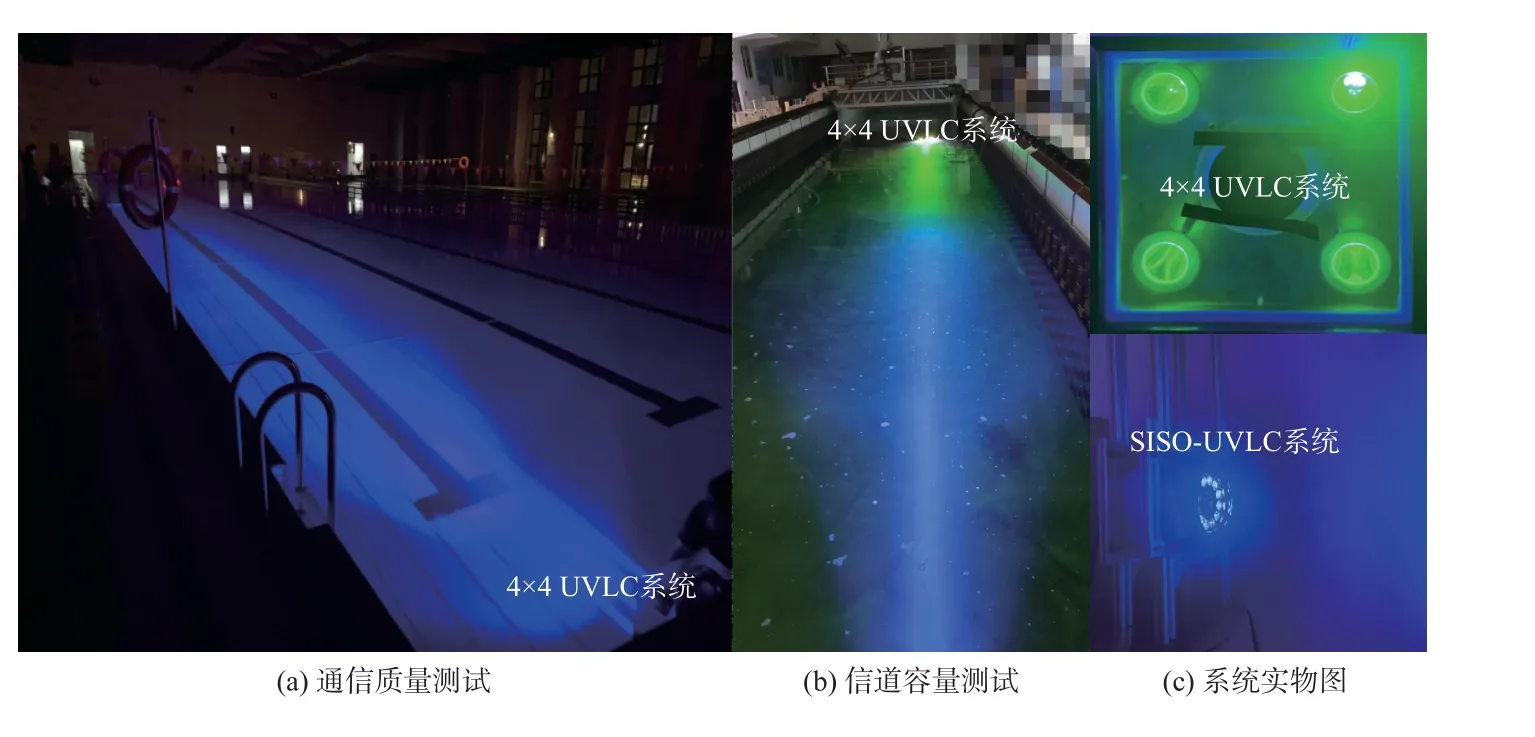
图11 系统水下环境测试Fig.11 Underwater environment experiment of system
5.2 信道容量与BER 性能结果分析
表2 给出了信道容量测试的部分数据结果,对5 次系统传输数据结果取平均值。本文所设计的4×4 UVLC 系统的速率约为26.7 Mbit/s,对比传统的SISO-UVLC 系统其通信速率仅为6.7 Mbit/s,因最大互信息量即信道容量提升使得系统的通信速率得到了约4 倍的增益。
图12 给出了水下测试结果对比图。图12(a)为传输多组不同大小数据量所得到的折线图,可以看出两条曲线的斜率约为4 倍的线性关系,与上文所仿真的通信容量结果相仿。图12(b)为系统BER 测试结果所绘制的折线图,可以看出当通信距离为20 m 以内时,系统的BER 性能差异不明显,均在10-7以内,而当通信距离超出这个范围后,SISO-UVLC 系统的BER 值高于4×4 UVLC 系统2~3 个数量级。其原因是,当通信距离小于20 m时,即使水下环境对SISO-UVLC 系统的光功率衰减更大,但仍在接收灵敏度范围以内。而当通信距离大于20 m时,本文所设计的4×4 UVLC 系统的抗衰减能力更强,接收端所得到的光功率更大,故能获得更优的误码率性能。
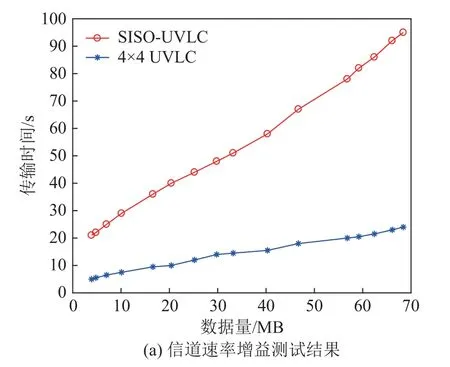
图12 水下测试结果对比Fig.12 Comparison of underwater test results
6 结论
在UVLC 领域中,LED 带宽的限制使得系统通信速率不如LD,为兼顾LED 的稳定性同时突破器件带宽所限并优化通信质量,本文提出将多信道复用技术应用到LED-UVLC 系统中,通过理论仿真以及实际水下环境通信测试,对比传统的SISO-UVLC 系统,所提升的信道容量与复用信道数呈正相关,本文所设计的4×4 UVLC 系统其传输速率可达26.7 Mbit/s,该速率远大于LED 本身的带宽。同时,由于多信道传输的特性,在水质环境和通信距离相同的条件下,4×4 UVLC 系统能获得更优的误码特性。因LD 抗干扰能力差,对光束的方向性要求高,将面临长远距离的对准问题以及极端环境干扰的问题。未来,人们若想探索深海或复杂海域,LED 的发展必不可免,本文的研究充分证实复用技术可突破LED 带宽限制,改善系统信道容量,提升误码率性能,该技术在水下通信领域有着广泛的应用前景。
