基于ANSYS的减重助行机器人结构分析
2023-09-15许靖宜周德威
孙 雅, 张 军, 许靖宜, 周德威
(1.安徽理工大学 人工智能学院,安徽 淮南 232001;2.安徽理工大学 机械工程学院,安徽 淮南 232001)
随着人口老龄化程度的加深,有轻中度行走障碍的老年人不断增加,他们有一定的行动能力,能够独立完成或借助医疗器械完成基本的步行运动。减重助行机器人不但能帮助老年人减少行走过程中自身所受的重力,更好地发挥肌肉力量完成行走训练,还能帮助老年人进行必要的腿部康复训练,防止肌肉劳损或者坏死,最大限度延缓身体衰老,对改善或恢复老年人正常行走能力具有重大意义[1]。减重助行机器人属于医疗机器人,可以分为两种主要类型:康复训练机器人和辅助型训练机器人。康复训练机器人的功能是帮助使用者完成各种主、被动康复训练;辅助型训练机器人的功能是帮助使用者补全退化的机体功能,让使用者可以完成正常生活所需要的各种行走动作[2-3]。本研究针对有轻中度行走障碍的老年人设计了一款室内辅助型减重助行机器人,以悬挂式工字钢作为减重助行机器人的运行轨道,以力矩电机作为减重机构,以移动小车作为辅助驱动力,辅助有行走障碍的老年人完成行走锻炼,延缓老年人腿部肌肉的衰老,使其恢复基本行走能力[4]。减重助行机器人在正常工作时,将承载使用者的全部质量,为验证机器人是否符合正常使用要求及在极限载荷下的应力、应变,需要对减重助行机器人进行ANSYS有限元分析,以保证机器人结构的安全和稳定。
1 机器人结构设计
对机器人的应用场景、适用对象及结构进行分析,确定本次设计的减重助行机器人为室内辅助型机器人,再根据减重助行机器人所要实现的功能设计机器人的整体结构。
1.1 机器人结构设计思路
减重助行机器人的整体设计思路如图1所示。首先确定需要设计的减重助行机器人为室内机器人且为辅助型训练机器人,其次考虑老年人训练过程中的体验感,决定将机器人设计为工字钢环形轨道,而不是目前使用较多的原地踏步或安装跑步机的形式,可根据老年人实际情况确定机器人整体尺寸,最后对减重助行机器人进行有限元分析,校核其结构稳定性。

图1 设计思路Fig.1 Design idea
1.2 机器人硬件结构设计
减重助行机器人的硬件结构分为运行轨道、移动小车、减重机构及扶手四大构件。运行轨道主要由支撑架和轨道组成,其中支撑架通过螺栓与地面连接,是整个机器人的主要受力结构,轨道由工字钢构成并与支撑架连接,共同给移动小车提供支撑力;移动小车作为减重助行机器人的主要运动机构,由步进电机驱动行走轮,给老年人提供步行训练的驱动力,结合导向轮在工字钢轨道上运动,导向轮分布在导轨左右两侧,结构对称;减重机构主要由滑轮组和电机组成,电机提供大小可控的力,滑轮组可以减少电机的输出力;扶手在老年人行走训练过程中起到安全防护的作用[5-6]。
由于移动小车、减重机构、扶手等都安装在轨道上,而且需要往复运动,所以须保证工字钢轨道有足够的强度和刚度。考虑到工字钢轨道的极限受力情况,工作过程中最大减重力不超过自身所受重力的40%,再加上小车和其他机构所受的重力,假设运动机构整体所受重力为300 N,老年人最大体重为1 000 N,体重的40%即400 N[7],也就是说在正常工作状态下,工字钢轨道受到的极限压力为700 N。考虑到实际应用中可能有人会将全部体重作用在扶手和钢丝绳上,因此为确保绝对安全,工字钢轨道所受极限压力设置为1 300 N,虽然这种情况非工作状态,但能维持结构稳定。
1.2.2移动小车
由于移动小车在工字钢轨道上运动,下方还需要连接减重机构,因此设计的移动小车结构要简单紧凑,运动时受力性好、平稳无抖动。如果单个行走轮因受力不均产生轻微位移,会导致小车前后摇摆,造成机器人稳定性下降,因此要设计两个行走轮以避免移动小车受力不平衡。由于移动小车也可能在左右方向受力不均,故还要设计两个导向轮,以确保移动小车沿轨道行走。导向轮和行走轮对称,使得结构稳定、美观。移动小车的驱动力来自安装在行走轮上的步进电机,步进电机能提供极限速度为0.3 m/s的可控移动速度,使运行稳定平缓。
1.2.3减重机构
减重机构主要由力矩电机、滚筒、滑轮组和钢丝绳组成,可通过力矩电机为装置提供可靠、稳定的减重力。减重力是否可控、控制难易程度及力的大小等因素直接决定了减重助行机器人的优劣[8]。滚筒的作用是将力矩电机输出的扭矩转化成减重系统的减重力。滑轮组有2个作用:一是通过一个动滑轮将力矩电机输出的力放大一倍,以减少力矩电机的负载,延长其使用寿命;二是通过动滑轮下的钢丝绳与人连接,使得在行走训练过程中老年人和移动小车不同步产生细微倾角时仍然可以保证减重力稳定且竖直向上。
1.2.4扶手
扶手要求高度可调,能在行走训练过程中给老年人提供一个稳定的支持力,起到安全保护的作用。在训练过程中,扶手受力可能导致移动小车前端产生微小倾斜,使得移动小车平稳性下降,因此加上一个防倾斜支架可保证整体结构安全、可靠。
其次,文献阅读也是考核模式革新的重要手段。传统的考核在考核内容上是以教材理论知识的记忆、理解为主,在考核方式上是单一的期末闭卷理论考试。这种注重结果的单一化考核模式的弊病是明显的。文献阅读在考核内容上可以考察学生的自主学习能力、表达能力和创新能力,在考核方式上摆脱了单一的理论考试,探索出一种多元化的课程考核体系。
对减重助行机器人进行详细的结构设计,模型如图2所示,关键部位放大示意图如图3所示。模型包括运行轨道、移动小车、减重装置、支架、扶手、减重马甲、电机、滑轮、防倾斜支架等,结构紧凑,稳定可靠。老年人使用减重助行机器人能完成保证正常生活的各种行走动作,有利于老年人进行步态训练,恢复基本行走能力。
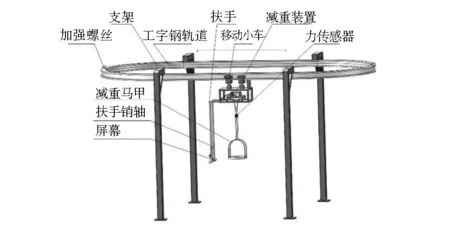
图2 减重助行机器人模型Fig.2 The model of weight-assisted walking robot

图3 减重助行机器人关键部位Fig.3 Key parts of the weight-assisted walking robot
2 有限元分析
ANSYS有限元分析的思想是首先将一个原本连续的物体划分为有限个单元,然后通过节点连接这些单元以承受等效的节点载荷,根据平衡条件进行仿真分析,最后根据变形协调条件对这些单元进行重组,使之成为新的组合[9]。减重助行机器人在正常工作时,需要承载使用者的全部体重,为验证机器人是否符合正常使用要求以及机器人在极限载荷情况下的应力、应变,需要对减重助行机器人进行ANSYS有限元分析。
利用ANSYS软件对机器人在不同工况下的受力进行有限元分析,将分析得到的应力、应变与材料屈服极限进行比对,并对最容易损坏的工况进行加载仿真,得到机器人丧失正常运行能力时的受载极限值,并与实际工作受载情况进行比较,以确保机器人运行的稳定性和安全性[10]。
2.1 机器人受力分析
首先考虑工字钢轨道的极限受力情况,训练过程中减重力不超过自身体重的40%。假设运动机构整体所受重力为300 N,老年人体重为1 000 N,体重的40%即400 N。在正常工作状态下,工字钢轨道受到的极限压力为700 N,但在实际生活中老年人可能将体重全部作用在轨道上,因此为确保安全,工字钢轨道受最大拉力应该设置为1 300 N,这种情况非工作状态,只要保证结构稳定即可[1]。
工字钢型号用腰高(h)×腿宽(b)×腰厚(d)表示,单位为mm,如“工150×66×5”表示腰高150 mm、腿宽66 mm、腰厚5 mm的工字钢。根据设计要求,工字钢预选为“工120×100×12.5”,具体参数如表1所示。

表1 工字钢参数Tab.1 Steel I-beam parameter
结合实际情况可知,设计的工字钢轨道需要安装在室内,且不能在训练时使老年人产生眩晕感。工字钢轨道长5 m、宽2.5 m,对工字钢轨道进行受力分析,如图4所示。

图4 工字钢轨道受力分析Fig.4 Stress analysis of steel I-beam track
根据设计可知,减重助行机器人有2组行走轮,每组又有2个行走轮,因此应该在每种工况施加4个线性力。由于减重助行机器人极限拉力Fn为1 300 N,所以每个线性力
(1)
式中:k1为行走轮组数,取值为2;k2为每组行走轮的个数,取值为2。将上述参数代入式(1)得F=325 N,即施加给轨道的线性力为325 N。
2.2 机器人工况分析
减重助行机器人所受到的极限拉力为1 300 N,加上工字钢轨道材料使用了结构钢,自身所受重力较大,根据工字钢规格尺寸及轨道长度计算轨道所受重力为 39 440 N[12],故假设本研究的轨道所受重力为 40 740 N。由于机器人结构具有高度对称性,进行有限元分析时,根据实际工况将轨道受力情况分为3种:工况1、工况2、工况3。工况1即减重助行机器人运行到直轨道中间点位置时的受力情况,工况2即减重助行机器人运行到直弯轨道节点位置时的受力情况,工况3即减重助行机器人运行到弯曲轨道中间点位置时的受力情况,如图5所示。分析3种工况后找到最危险的工况点,得出最危险工况点能承受的最大载荷。

图5 工况示意图Fig.5 Working diagram
2.3 机器人有限元分析——以工况1为例
对机器人进行有限元分析前,先将模型简化,由于移动小车、减重机构、扶手等是机器人自身的部件,为提高分析效率、减少运算时间,在模型分析时去除这些部件,仅考虑其整体所受重力即可,简化后的模型与简化前在进行有限元处理时结果相似。移动小车与工字钢线性接触简化成4个线性力[13],根据实际情况只需要分析3种工况即可,将简化后的模型导入有限元。
第一步,选择材料。运行轨道材料选择结构钢,结构钢材料在ANSYS软件中定义如图6所示,其参数值如表2所示。

表2 轨道材料参数值Tab.2 Orbital material parameter value
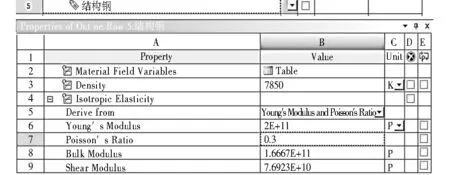
图6 材料定义截图Fig.6 Material definition diagram
第二步,网格划分。将简化后的机器人模型导入有限元后,将支架与运行导轨设置为绑定连接,并对其进行网格划分,网格大小设置为100 mm,划分网格后该模型共有71 311个节点、36 991个实体单元。
第三步,施加约束并求解。将公式(1)得到的每种工况受到的线性力325 N输入软件。载荷施力点选在工字钢导轨与移动小车接触的4个接触点,同时对支架的4个支撑施加固定约束[14]。对机器人进行静力学分析求解,求解后得到等效应力图(图7)和等效应变图(图8)。
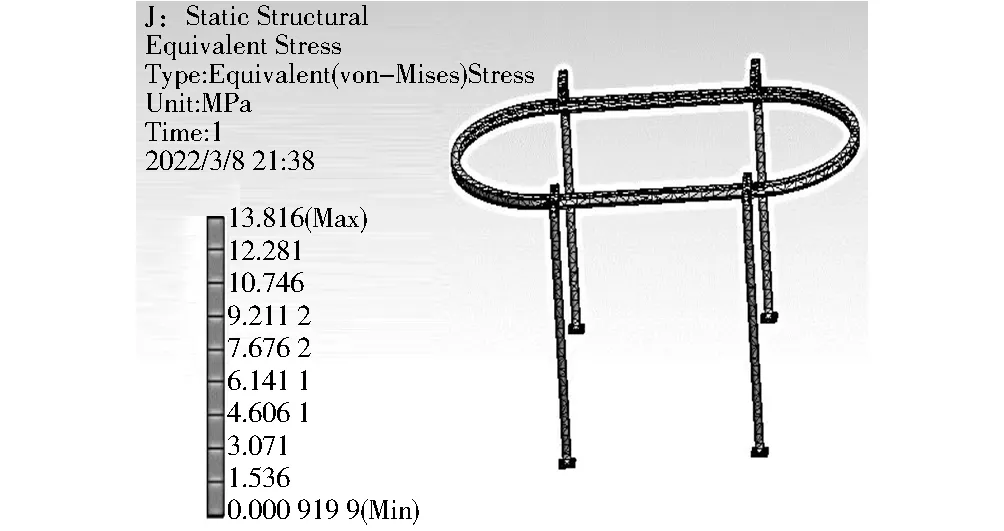
图7 等效应力图Fig.7 Equivalent stress diagram

图8 等效应变图Fig.8 Equivalent strain diagram
由图7和图8可以看出,工况1下机器人的最大应变在支架与工字钢轨道连接处,为0.327 mm。同理,工况1下机器人的最大应力在工字钢轨道表面,为13.816 MPa。
对工况2、工况3进行分析,得出工况与应力、应变的关系,如表3所示。

表3 工况与应力、应变的关系Tab.3 Working condition and stress strain relationship
与结构钢材料的性能参数对比可知,机器人在极限受力状态下最大应力远低于材料的屈服应力,满足设计要求,故本设计合理。对减重助行机器人工作时的运动情况进行分析,得出正常工作状态下施加给机器人的最大减重力为400 N,对机器人施加的最大拉力为1 300 N。据此选定机器人的尺寸,并用ANSYS软件对减重助行机器人在3种工况下的运行情况进行有限元仿真,得出在3种工况下产生的最大应力均小于结构钢材料的屈服应力235 MPa,最大应变也在合理范围内,满足使用要求。
3 结语
本研究针对有轻中度行走障碍的老年人设计了一款适用于室内的减重助行机器人,对减重助行机器人整体结构进行了设计,并用ANSYS软件对减重助行机器人进行了仿真分析,得出如下结论:减重助行机器人正常运行和非工作状态下,3种不同工况所产生的应力和应变都在材料许用范围内,机器人结构满足强度与刚度要求。
