综合型灾难环境模拟搜救机器人设计与测试研究
2023-09-15林炳魁
林炳魁
(漳州职业技术学院 智能制造学院,福建 漳州 363000)
如今,自然灾害、意外事故等突发事件发生得越来越频繁,在灾难发生现场使用机器人进行探测与救援,可以大大提升救援的成功率,同时救援人员的安全也得到了保障[1]。救援机器人一般应具有识别地形、主动避障、感知外载、自主平衡等功能[2]。相比轮式和履带式机器人,步行机器人可以更好地适应崎岖地形,实施有效救援[3],但步行机器人对于算法与结构参数设置的要求极高,难以进行大范围推广应用[4]。轮式机器人因结构简单、组装便利、性价比高等特点成为当前搜救机器人的主流产品[5]。目前,灾难搜救机器人研究主要集中在运动结构、跟踪算法、图像处理、监控系统、智能化开发等方面[6-9]。本研究设计的是一款集火源查探定位、温湿度测量、可燃气体检测、超声波测距、蓝牙遥控驱动为一体的综合型灾难搜救机器人。首先,将小车与蓝牙驱动部分相结合,做好机器人的整体框架,再按照3个功能模块的工作要求分别进行设计;然后,选定各个功能所要求的元器件、车体材料、驱动电机、单片机系统和驱动模块来制作搜救机器人样机,进行机器人的设备安装与调试;最后,验证机器人对于火源、危险气体、温湿度上下限、超声波测距的报警功能是否正常运行。本研究结论可为量产灾难搜救机器人提供相关的理论依据。
1 灾难搜救机器人总体方案设计
1.1 设计目标和要求
本设计的这款灾难搜救机器人,应能对灾难发生区域进行探测,起到辅助救援的作用,要求其具有火源查探定位、温湿度测量、可燃气体检测、超声波测距、蓝牙驱动等功能,所以需要用到火焰检测传感器、温湿度检测传感器、烟雾检测传感器、超声波传感器、蓝牙驱动模块、单片机模块、液晶屏显示模块和电源模块等。灾难搜救机器人总体设计如图1所示。
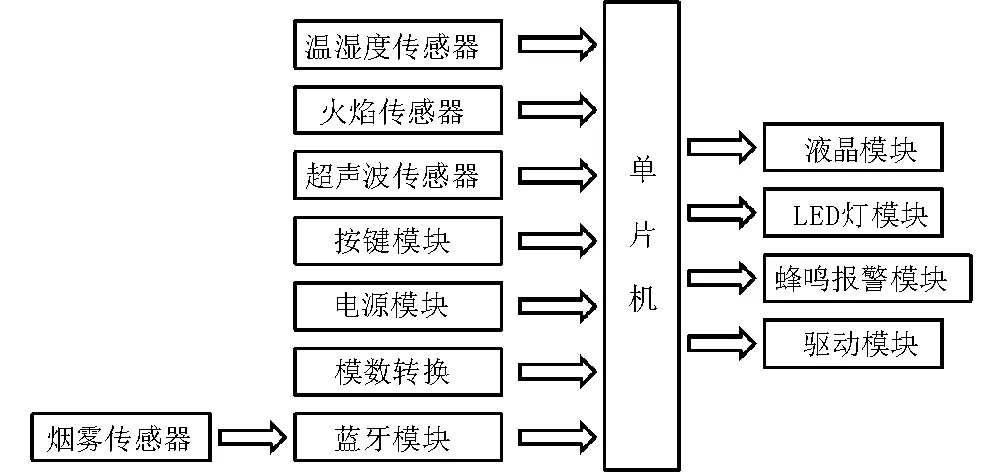
图1 灾难搜救机器人总体设计Fig.1 Overall design of the disaster search and rescue robot
1.2 硬件选型
本设计的灾难搜救机器人主要应用于平坦区域,所以选用速度相对较快的轮式小车作为主体。
1.2.1驱动马达
本设计的机器人质量为1 kg左右,受到约9.8 N的重力,4个轮胎与地面摩擦系数取0.3,阻力为5.88 N,平均速度为0.18 m/s,驱动功率为1.06 W。因此,本设计选择TT减速电机作为驱动马达,其功率为1.477~2.200 W。
1.2.2电源
本设计选用的驱动模块需要12 V左右的电压。综合电池盒的规格,从环保角度出发,选3节3.7 V的锂电池更加合理。
1.2.3单片机
STM32F407型芯片是一种高性能Cortex-M4 32位微控制器[10]。本设计采用的程序语言是C语言,而STM32F407型芯片支持C语言。此单片机拥有114个双向I/O接口,在一个系统中可以连接多个功能模块,且功耗低、稳定性好。
1.2.4显示器模块
与数码管相比,液晶屏的体积更小,图像显示更加稳定,可以更清晰地显示出测得的具体数值。
1.2.5传感器模块
温湿度传感器:选用DHT11型传感器,它集合了温度与湿度两个功能的测量模块,湿度量程20%~90%、温度量程0~50 ℃。火焰传感器:选用L型火焰传感器,通过比较器输出,稳定性较高,当探测角达到60°时,传感器对光谱最灵敏。烟雾传感器:在烟雾报警方面,可靠性是最重要的性能,半导体式烟雾传感器的灵敏度、响应速度都优于接触燃烧式传感器,所以选择MQ-2型烟雾传感器。超声波传感器:选择HC-SR04型超声波传感器,该传感器价格低廉,品质稳定,使用简单方便,无须设计超声波接收电路。蓝牙模块:选用CSR蓝牙芯片,可适配手机和笔记本电脑。
1.2.6其他辅助硬件
采用发光二极管(LED)作为报警灯,利用8550型三极管(PNP型)的开/关功能控制蜂鸣器发音,通过L298N型芯片控制电机驱动。
1.3 软件设计
各软件模块设计如图2所示。

图2 各软件模块流程Fig.2 Flow chart of each software module
1.3.1火焰与烟雾报警模块
由图2(a)可以看出,系统通电后液晶屏和报警限定值会被初始化,系统开始检测3个主要工作模块的功能,并将数值和判断信号分别发送给单片机,由液晶屏和报警灯光来反馈结果。当烟雾浓度或温度大于报警限定值时,报警灯与蜂鸣器开始报警,按下设置的按键,程序回到初始状态,而火焰传感器则无须改变。
1.3.2超声波测距模块
由图2(b)可知,此系统通电后,液晶屏被初始化,随后超声波测距模块发射超声波并将接收到的测量结果显示在液晶屏上。由于为可能障碍物设置了一定距离的限定值,所以一旦进入报警范围,机器人的报警系统便启动,操作员停止操作。
1.3.3环境温湿度测量模块
由图2(c)可知,系统初始化后开始正常进行温湿度的测量,在液晶屏上显示出环境温湿度的具体数值后,便进入温湿度上下限报警阶段。只要温湿度低于下限或高于上限,声光报警系统便发出警报。
1.3.4蓝牙驱动系统
由图2(d)可以看出,系统通电后,蓝牙模块被初始化,接着便发出信号,如果手机端接收到信号,则开始发送指令,驱动模块接收到指令后,液晶屏上显示机器人当前的运动状态,随后机器人开始根据指令移动。
2 结果与分析
2.1 灾难搜救机器人的总体结构
依据硬件和软件设计方案,以小车为主体,整合各个模块,最终得到综合型灾难搜救机器人,如图3所示。本设计机器人在结构上分为2层,上层是火焰与烟雾报警系统、超声波测距系统、环境温湿度测量系统这3个功能子模块,下层则是蓝牙驱动系统。
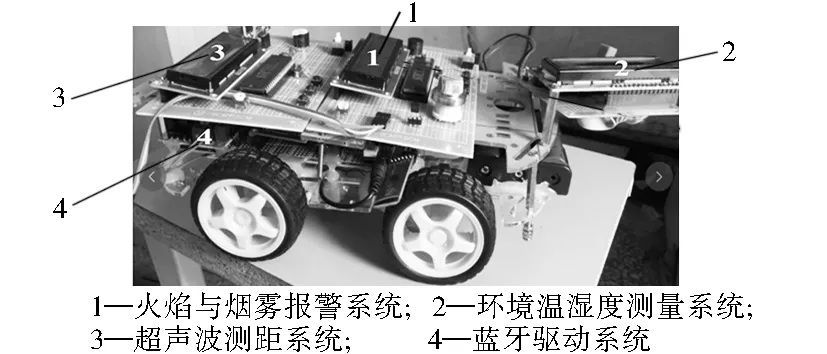
图3 搜救机器人实物Fig.3 Search and rescue object
2.2 灾难搜救机器人性能测试结果
2.2.1火焰与烟雾报警系统功能
火焰与烟雾报警系统通电并开启后,点燃打火机,慢慢靠近火焰传感器,火焰传感器报警后熄灭打火机。将打火机与火焰传感器的距离拉开至1 cm,再次点燃打火机,观测此时火焰传感器是否报警,记录距离,然后熄灭打火机,将距离设置为2 cm,与之前的操作相同,观测报警情况,记录距离。此后逐渐拉大打火机火源与火焰传感器的距离,直至火焰传感器不再报警,记录此时的距离,此时所测距离为火焰传感器最大感应距离。测试结果见表1。

表1 火焰传感器测试结果Tab.1 Test results of flame sensor
由表1可知,当检测距离为1~15 cm时,火焰传感器能正常工作,可以很好地检测周围环境是否有火源。火焰传感器测试结束后,将打火机靠近烟雾传感器,微微按下打火机,释放丁烷气体,并观察报警系统是否正常工作,结果如表2所示。

表2 烟雾报警测试结果Tab.2 Smoke alarm test results
由表2可知,在自然环境下,没有烟雾或其他危险气体接触传感器时,声光报警系统不会报警,而当空气中有烟雾或可燃气体存在时,声光报警系统则开始报警。
2.2.2超声波测距系统功能
首先,将障碍物放置在超声波发射器前面,测出此时障碍物至超声波模块的距离。然后,给系统通电,使超声波模块开始工作,记录液晶屏上的数值。接下来,逐渐拉大障碍物与超声波模块之间的距离,观测显示数据与实际数据的偏差,直到偏差数值较大时停止记录。超声波测距结果见表3。

表3 超声波测距结果Tab.3 Ultrasonic ranging results
由表3可以看出,当距离在100 cm以内时,超声波测距较为精确,误差可能来自障碍物设定的距离不精确,然而当障碍物与超声波发生器之间距离大于120 cm时,所测得的距离就不太准确了,显示数据总是在112~113 cm变化。由此可以得出结论,超声波测距的最大有效距离约为112 cm。但是,超声波测距的最大距离远大于火源传感器的最大探测距离,所以超声波测距模块可以较为精确地对火源进行定位。
2.2.3环境温湿度测量系统功能
分别在室内、阳台和楼道3个不同温度与湿度的环境中对机器人进行测试,将测量结果与温湿度计所测数据进行比较,结果见表4。

表4 温湿度测量数据对比Tab.4 Comparison of temperature and humidity detection data
由表4可以看出,在不同温湿度环境下,所测温度与环境实际温度相差不大,然而由于机器人与测试环境接触时间过短,导致湿度测量数值不准确。
2.2.4蓝牙遥控驱动功能
蓝牙开启后,用手机搜索小车蓝牙信号,连接完成后点击“前进”键,在小车移动到一定距离自动停下后关闭蓝牙,记录此时小车起始位置与当前位置的距离,这个距离就是最远的控制距离,见表5。划定一段6 m的路程,并将每1 m做好标记,开启小车使其移动,记录小车每通过1 m的时间。将通过距离与通过时间相除得出此时的速度,测算速度平均值,得到小车的运动数据,见表6。

表5 蓝牙控制小车移动距离与控制情况Tab.5 Moving distance and control of bluetooth control car
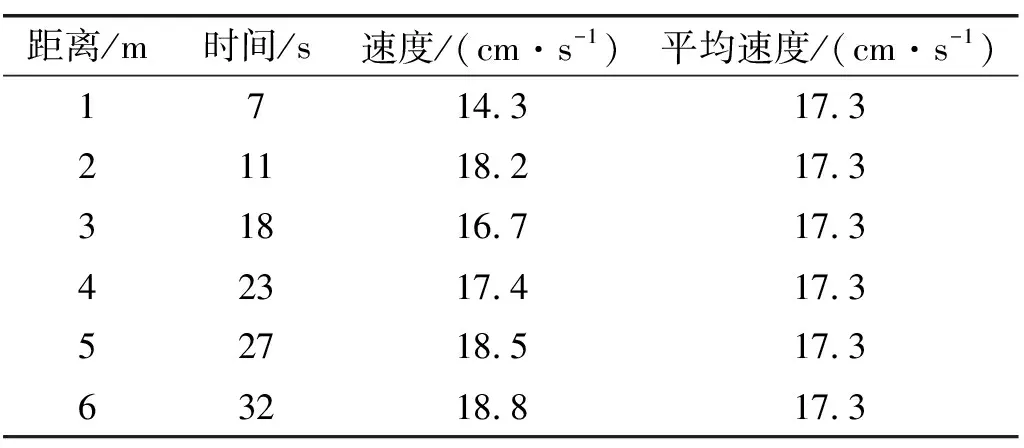
表6 小车移动距离与速度的关系Tab.6 The relationship between mobile distance and speed of car
由表5可以发现,蓝牙控制信号最多能传到30 m左右,到达29 m时,对小车的控制已不太灵敏,但小车还能在这种不稳定的状态下继续前进5 m左右,之后就停止不动。由此可以推测,该小车的蓝牙控制距离为0~30 m。
由表6可以看到,小车行驶到2 m后,由于地面不是完全平坦的,导致速度有所下降,但最终能维持在18 cm/s左右。
3 结语
本研究设计了一款综合型灾难搜救机器人,实现了火源定位、温湿度测量、可燃气体检测、超声波测距、蓝牙驱动等功能,可为灾难发生区域进行探测起到辅助救援作用。测试表明,所设计的灾难搜救机器人,适用于较平坦空旷的环境,可准确定位火源,检测危险气体,用蓝牙控制机器人移动时,无须救援人员直接进入灾区,而且可燃气体检测功能可以避免现场救援人员受到二次伤害。本设计中,许多元器件都具有双重功能,这样虽然能简化设计工作,但所测数值会不精确,所以下一步的工作要在保证功能完整的条件下,将各个检测模块分开,以单独的元器件来检测数据。