密集障碍物下智能机器人避障路径自主选择研究
2023-09-15张凌超
李 可,张凌超,米 捷
(1.河南工程学院 工程训练中心,河南 郑州 451191;2.机械工业第六设计研究院有限公司,河南 郑州 450007;3.河南工程学院 计算机学院,河南 郑州 451191)
随着我国智能技术的不断发展,智能机器人在很多领域都得到了应用,我国大部分生产型企业已经开始采用智能机器人完成一些机械性工作[1]。在保证机器人完成工作的同时,也需要提高工作效率。由于自主选择避障路径是智能机器人运行的重要前提条件,所以研究智能机器人避障路径的自主选择具有非常重要的意义[2-3]。
针对智能机器人避障路径的自主选择,一些学者对其进行了研究。例如,华洪等[4]提出了动态环境下智能机器人的路径规划方法,该方法基于智能机器人的运动规律,首先通过删除多余节点、添加新节点进行全局路径优化,然后利用滚动窗口对局部区域进行路径规划,以此控制智能机器人避障。胡玉蝶等[5]提出了高斯噪声发散的智能机器人路径规划法,该方法主要是将因障碍物影响产生的数据信息点云消隐,使智能机器人在回归路径上可以避开障碍。赵泽龙等[6]提出了数字化变电站巡视机器人避障路径智能规划方法,该方法明确人工避障势场区域,根据变电站巡检工作的执行状态,计算巡检障碍距离及方位,搭建数字化变电站巡视机器人的Dijkstra多目标避障路径智能规划模型,结合动态窗口法实现路径规划。王言军[7]提出了基于改进蚁群算法的输电线巡检机器人避障路径规划方法,该方法首先应用激光传感器获取障碍物体相关信息,完成障碍物体的检测与建模,计算巡检机器人与障碍物体的位姿关系,推出巡检机器人避障算法,然后确定巡检机器人避障路径规划目标,基于狼群分配原则与中心点平滑方法改进蚁群算法,执行算法获取最佳避障路径规划结果,实现了输电线巡检机器人避障路径的规划。但是,上述方法在规划避障路径时的环境信息较为单一,不存在复杂的外在环境因素干扰,因此在面对密集障碍物时效果不够理想。
为解决上述方法存在的问题,本研究探讨了在密集障碍物环境下智能机器人的避障路径自主选择方法,基于改进人工势场法对智能机器人自主避障路径进行选取,使智能机器人在运行时可以避开所有障碍物,高效自主地完成任务。
1 智能机器人的环境感知及分类
1.1 采用激光雷达采集环境信息
智能机器人开始运行时,首要任务是通过感知技术来获取周围环境的各种信息[8]。激光雷达技术具备高效获取周边环境信息的能力,并且视距区域较广,因此适于采用激光雷达对智能机器人的周围环境进行扫描,并快速传输采集到的环境信息[9]。
1.2 采用BP神经网络对智能机器人周围环境分类
BP神经网络作为一种人工智能技术,其模型表达清晰明了[10],拥有很好的非线性分类能力。因此,本研究采用BP神经网络对激光雷达采集的环境信息进行分类,以获取障碍物的分类结果。
1.2.1BP神经网络的正向学习方法

(1)
1.2.2BP神经网络的反向学习方法
假设yj为第j神经元节点,ki为第i神经元节点,xm为第m神经元节点。
首先针对yj和ki的连接权值ωij,使用最速下降法调试:
(2)
式中:η为调整因子。
然后针对ki和xm的连接权值ωmi,基于误差信号传送调试:
(3)
由于密集障碍物环境的复杂性,将激光雷达搜索到的环境信息输入BP神经网络[11],通过网络训练得到网络参数后,对智能机器人运行环境的密集障碍物进行分类并输出结果。
2 基于改进人工势场法的智能机器人避障路径选择
2.1 传统人工势场法
传统人工势场法是一种用于智能机器人导航的算法,它可在机器人所处空间中创建一个势场,对机器人与目标点间的引力及机器人与障碍物间的斥力进行叠加,形成一个合力,从而引导机器人朝着目标点移动。人工势场表示如下:
U=Uatt+Urep,
(4)
式中:Uatt表示智能机器人与局部目标点之间的引力势场;Urep表示智能机器人与障碍物之间的斥力势场;U表示势场和。局部目标点和障碍物与智能机器人间的相互作用对应引力势场和斥力势场的负梯度,从而求出人工势场对智能机器人的合力F,表达式如下:
F=Fatt+Frep,
(5)
式中:Fatt表示智能机器人与局部目标点之间的引力;Frep表示智能机器人与障碍物之间的斥力。
引力势场函数表达如下:
(6)
式中:Xg表示局部目标点位置;Uatt表示智能机器人与局部目标点之间的引力场;X表示智能机器人位置;k表示引力增益系数;‖X-Xg‖表示智能机器人与局部目标点之间的最短路程。
智能机器人与局部目标点之间的引力势场负梯度表示如下:
Fatt=-k‖X-Xg‖。
(7)
斥力势场函数表达式如下:
(8)
式中:X-X0表示智能机器人和障碍物之间的路程;m表示斥力的增益系数;ρ表示障碍物的影响路程。
智能机器人与障碍物之间的斥力表达式如下:
(9)
式中:Frep1表示障碍物对智能机器人的方向;Frep2表示智能机器人对局部目标点的方向。Frep1和Frep2可分别表示为
(10)
(11)
如果智能机器人和局部目标点之间的路程增加,引力与斥力将同时增加,就会导致智能机器人不能到达局部目标点。
第一,项目完成后,各小组在创客工坊完成项目汇报,汇报环节不仅可以锻炼学生表达能力,应变能力,还可以让学生体验努力给自己带来的成就感,从内在激发学生学习动力。第二,综合评价,通过各小组项目汇报及项目结题报告,创客导师可以从基础知识学习、技能操作、自主拓展学习、团队协作等几方面对学生做出多维度综合评价,同时引入第三方评价机制。第三,如学生完成的项目为企业所需,可引入市场评价机制,进行孵化投放市场。
2.2 改进人工势场法
2.2.1智能机器人避障路径方向选择
传统的人工势场法在智能机器人向局部目标点前进时,引力呈下降趋势,障碍物附近的引力会小于斥力,导致智能机器人无法到达目标点[12]。为减少斥力作用,本研究提出基于改进人工势场法实现智能机器人路径方向选择,计算公式如下:
(12)
式中:n表示任意正实数。
利用负梯度可求出改进后的斥力,计算公式如下:
(13)
改进后斥力的2个分量表达式如下:
(14)
改进后的斥力分解为2个分量后,与智能机器人在引力作用下产生的合力可以使机器人向局部目标点继续前进[13]。

2.2.2智能机器人避障路径选择
完成避障路径方向选择之后,设智能机器人在p点按照规划的方向开始前进,再对智能机器人到局部目标点的路程进行计算,当智能机器人与局部目标点的位置在一定区域时,终止前进[15]。先算出起始点p到局部目标点g的路程t,为获取具体的空间数值,利用激光雷达对避障路程的方向进行扫描,设p点为(xp,yp),局部目标点为(xg,yg),可得出路程

(15)
因为激光雷达在扫描时不是静止的,所以需要对起始点与局部目标点的路程t实施误差补偿,得到修正后的激光束线数据,通过前两个周期的扫描数据得到图1。如图1所示,智能机器人在时间a的扫描值是φ,在时间A的扫描值是γ,移动之后机器人和局部目标点的误差值角度分别为i、θ,得到修改后的目标路程
(16)
为计算智能机器人路径方向的前进速度,利用航位推算来计算其运动状态,预计到达时间的值会被运用到势场中作为一个标量,再转化成智能机器人在前进路径上的虚拟驱动力[16]。设绝对坐标系里智能机器人的姿态角为β,智能机器人的前进速度为v,可得出智能机器人到局部目标点区域内的时间
(17)
将时间A转换为智能机器人的虚拟驱动力,为防止出现斥力和引力形成180°或合力是0的情况[17],平衡斥力可以通过控制虚拟驱动力,从而留存避障路径的吸引力,得到虚拟驱动力
(18)
利用虚拟驱动力的计算公式可以得出避障路径的虚拟力,智能机器人可以控制模块获得路径数据,从而按照设定路径前进,至此实现了改进人工势场法对智能机器人避障路径的选择。
以上为一个局部目标点的规划路径,智能机器人抵达这个局部目标点之后,利用激光雷达得到当前新的环境信息,求出下一个局部目标点的规划路径,一直重复此操作,直到获取全局目标点的规划路径,即获取了全局的避障路径。
3 实验分析
为验证本方法的有效性,采用MATLAB软件搭建不同密集程度的障碍物场景,利用文献[4]和文献[5]作为对比方法,对不同密集程度障碍物场景下的机器人进行避障路径选取。其中,使用型号为LMX06-PS05的激光雷达,激光发射方式为相控阵,激光波长和线束分别为910 nm和32线,传输速率为1 000 kb/s。
统计了3种方法在少量障碍物和密集障碍物环境下机器人前进方向、前进路径及避障情况后,设置智能机器人起始位置为(0,0),目标点为(10,9),障碍物在其路径途中摆放,机器人对路径自主选择的结果如图2和图3所示。

图2 少量障碍物下的机器人路径Fig.2 Robot path under a small number of obstacles

图3 密集障碍物下的机器人路径Fig.3 Robot path under dense obstacles
从图2和图3可以看出:少量障碍物环境下,智能机器人从起始点(0,0)前进时,采用本方法可以避开全部障碍物,向目标点前进,最后到达目标点(10,9),智能机器人没有出现停止前进的情况,而其余两种方法均未能完全躲避障碍物,有停止前进的情况;随着障碍物的增加,无论障碍物的位置和密集程度如何变化,采用本方法的智能机器人都可以持续向目标点前进,直至到达目标点(10,9),都没有出现停止前进的情况,而其余两种方法均不能完全躲避障碍物。由此可知,采用本方法可以使智能机器人在密集障碍物环境下实现自主避障路径选择。
为更加深入地验证本方法的有效性,用碰撞危险度作为评估3种方法应用效果的指标。时间碰撞危险度,即智能机器人与障碍物遇到时的最小时间,用χG表示;空间碰撞危险度,即智能机器人与障碍物遇到时的最近距离,用χK表示。χG和χK的计算公式如下:
(19)
(20)
式(19)和式(20)中:t1为障碍物与智能机器人会遇到的最近时间;t2为障碍物从目前坐标到达会遇到坐标的时间;G为会遇到的时间,数值越高表示机器人撞击障碍物的风险越低,数值越低表示机器人撞击障碍物的风险越高,期望值不低于12 s;d1为遇到时的绝对安全距离;d2为障碍物与智能机器人无碰撞情况下通过的最小距离。
本研究使用的LMX06-PS05型激光雷达,其最大探测距离为50 m。考虑到激光雷达探测范围内可能存在其他因素,设置一个相对较大的距离可以更好地保证机器人的安全,因此设置最小距离为4.15 m,当χK>d2时为安全状态,其中K表示会遇距离。
当障碍物移动时,计算不同速度下时间碰撞危险度和空间碰撞危险度,结果如表1所示。
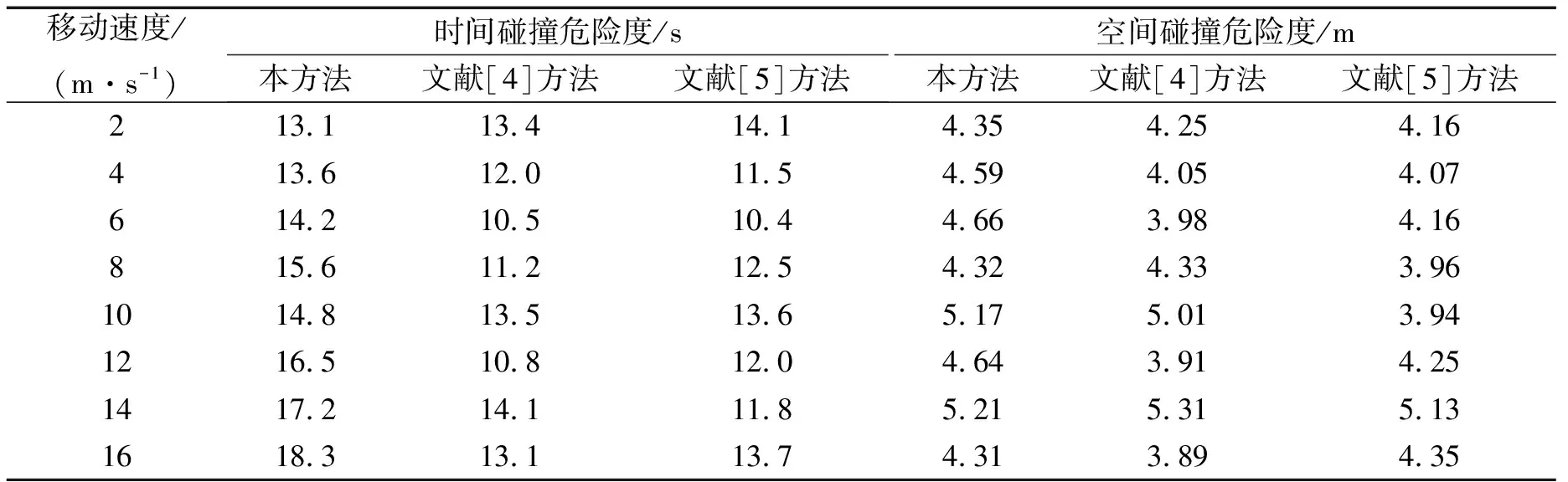
表1 碰撞危险度验证结果Tab.1 Collision hazard verification results
由表1可以看出,应用本方法后,无论移动障碍物速度是多少,在速度不断加快时,时间碰撞危险度和空间碰撞危险度都分别大于期望值12 s和最小距离4.15 m,最大时间碰撞危险度达到了18.3 s,最大空间碰撞危险度达到了5.21 m,而其余2种方法均存在小于期望值和最小距离的情况,故发生碰撞的概率较大。
4 结语
本研究探讨了以采集到的智能机器人周围环境和障碍物类型为基础,基于改进人工势场法实现智能机器人避障路径的自主选择。通过仿真测试得出,无论障碍物的位置和密集程度如何变化,智能机器人都可以无碰撞地到达全局目标点,实现密集障碍物场景下智能机器人避障路径的自主选择。