基于MATLAB的轮载式四轮定位参数检测系统*
2023-09-08陈少伟潘梦鹞赵娟刘育清
陈少伟 潘梦鹞 赵娟 刘育清
基于MATLAB的轮载式四轮定位参数检测系统*
陈少伟1潘梦鹞1赵娟1刘育清2
(1.广东工贸职业技术学院,广东 广州 510510 2.广州市机动车检测行业学会,广东 广州 510410)
定期对汽车进行四轮定位参数检测可避免爆胎、行驶不稳定等问题。该文提出一种基于MATLAB的轮载式四轮定位参数检测系统,结合三轴加速度传感器、ZigBee通信、MATLAB软件等技术,实现车轮三维加速度数据的实时读取及快速解算,获得四轮定位参数。该系统具有结构简单、参数测量准确和人机交互友好等特点,具有一定的市场推广前景。
MATLAB;四轮定位;三维加速度;ZigBee通信
0 引言
随着我国经济的快速发展,汽车已成为人们必不可少的交通工具。汽车的车轮、转向机构和车轴之间存在相对的安装位置,即汽车四轮定位参数。汽车四轮定位参数对汽车直线行驶的稳定性、方向盘转向回正以及车轮地面摩擦等方面都有重要的影响[1]。每款车型的汽车四轮定位参数的标准范围均由厂家规定。而汽车维修、交通事故等都可能导致汽车四轮定位参数发生变化。定期进行汽车四轮定位参数检测,可避免爆胎、行驶不稳定等问题的发生[2-3],对汽车安全驾驶有着十分重要的意义。
本文提出一种基于MATLAB的轮载式四轮定位参数检测系统。该系统通过三轴加速度传感器采集汽车车轮三维加速度数据,并将该数据无线传输到MATLAB软件进行数据处理,最终得到汽车四轮定位参数。
1 检测系统总体设计
基于MATLAB的轮载式四轮定位参数检测系统由人机交互操作端、ZigBee无线通信、车轮参数检测模块等组成,如图1所示。
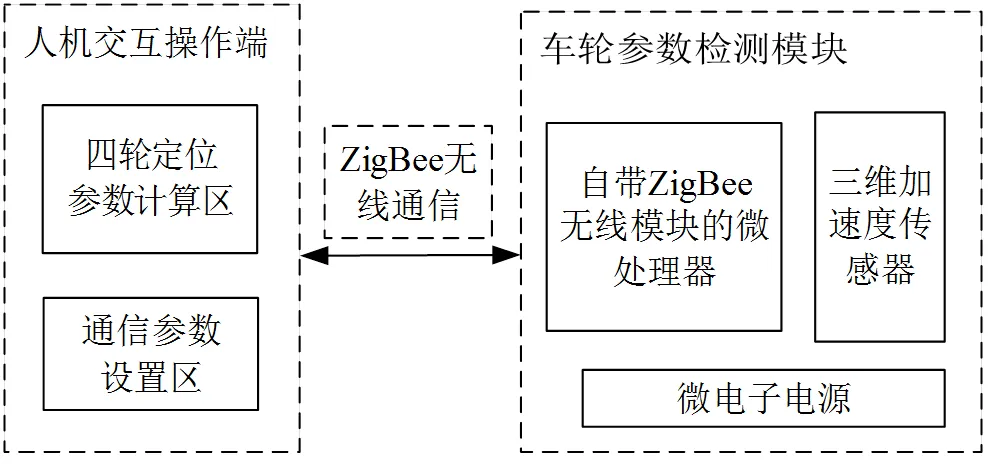
图1 基于MATLAB的轮载式四轮定位参数检测系统组成框图
人机交互操作端主要实现汽车四轮定位参数的计算和通信参数的设置。
车轮参数检测模块安装在轮毂盖上,它以自带ZigBee无线模块的微处理器为控制核心,配置了三维加速度传感器和微电子电源,可实时采集车轮的三维加速度数据。
ZigBee无线通信实现人机交互操作端和车轮参数检测模块之间的数据传输。
基于MATLAB的轮载式四轮定位参数检测系统的工作过程为:首先,在人机交互操作端设置通信参数并启动数据接收;然后,车轮参数检测模块实时采集车轮的三维加速度数据,并通过ZigBee无线通信网络将该数据上传到人机交互操作端;最后,人机交互操作端对车轮的三维加速度数据进行处理,得到汽车四轮定位参数。
2 硬件设计
车轮参数检测模块通过三维加速度传感器采集车轮在、、3个轴方向上的重力加速度数据,并把该数据传输到人机交互操作端。考虑到该模块有体积小、供电简单、数据传输方便等需求,选用了自带ZigBee无线模块的微处理器CC2530和三维加速度传感器MMA8451Q。
微处理器CC2530是一款具有8051内核的智能控制单元,封装了Z-STACK协议,自带1个ZigBee无线模块,可方便地构建ZigBee数据传输网络[4-5]。
MMA8451Q是一款低功耗三轴数字加速度计,量程为±2 g,具有14位数据精度,采用I2C数据输出,最高输出速率达800 Hz,满足系统数据采集的要求[6]。
微处理器CC2530和三维加速度传感器MMA-8451Q的供电电压均为2 ~3.6 V,因此采用LIR2032 3.6 V纽扣电池作为微电子电源进行供电。
3 软件设计
基于MATLAB的轮载式四轮定位参数检测系统主要基于MATLAB软件进行程序设计,主要由数据读取、数据预处理、四轮定位参数计算、人机交互界面等4个部分组成。
3.1 数据读取
车轮参数检测模块采集的车轮三维加速度数据,由ZigBee无线通信网络传送到人机交互操作端的计算机USB端口,MATLAB软件自带的串口通信模块通过计算机USB端口读取该数据,数据读取程序流程如图2所示。

图2 数据读取程序流程
首先,MATLAB软件通过调用serial()函数创建串口对象;然后,设置波特率、校验位、数据位、停止位等串口通信参数;最后,调用fopen()函数打开串口并启动数据读取流程。
MATLAB软件的串口支持查询和事件驱动2种方式来读取计算机USB端口的串口数据。本系统采用中断事件驱动,即串口数据接收缓冲区的数据量达到预设的阈值就触发中断事件,在function instrcall-back(obj, event)中断函数中实现数据的读取。这种方式能够根据上传的数据量进行实时响应,符合本系统的设计要求。
3.2 数据预处理
数据预处理是对MATLAB软件读取的串口数据进行数据重组和修正。
MATLAB软件读取车轮三维加速度数据后,按照上传数据包格式对该数据结构进行重组和存储,以便四轮定位参数计算程序进行处理。上传数据包格式包括开始字符、数据长度、车轮参数检测模块ID号、采样时间点、三维加速度数据和结束字符等6部分。数据包单次发送的数据长度为40个字节。4个车轮参数检测模块的、、轴方向的加速度数据经数据重组后,分别被存到4个数组变量中。
三维加速度传感器的电路设计、模块安装等都可能导致采集的数据存在偏差,本文通过数据测试分析获得:、、轴的加速度修正值分别为0.026 4、0.013 736 7、0,并在程序中进行数据修正。
3.3 四轮定位参数计算
基于MATLAB的轮载式四轮定位参数检测系统通过解算车轮的三维加速度数据求出四轮定位参数。四轮定位参数包括车轮外倾角wi、车轮前束角wi、主销内倾角ki、主销后倾角ki4个参数[3],如图3所示。
车轮外倾角wi的解算公式为
式中:amy为转向轮侧向加速度。
车轮前束角wi的解算公式为

假设转向轮绕主销轴左右转动相同的角度ki、-ki,则主销内倾角ki的解算公式为
式中:mx(ki)、mx(-ki)分别为转向轮向左和向右转动相同角度的切向加速度。
假设转向轮绕主销轴左右转动相同的角度ki、 -ki,则主销后倾角ki的解算公式为
基于上述计算公式[7],设计MATLAB四轮定位参数计算程序,以左前轮为例,程序如下:
%计算左前轮的外倾角/前束角
for k=1:1:length(k1lpha_03_yhe)
gamma_wi1(k)=asind(k1lpha_03_yhe(k));
gamma_wi2(k)=acosd(k1lpha_03_yhe(k)/ (9.80665*sin(gamma_wi1(k))))-90;
end
%计算左前轮的主销内倾角/主销后倾角
K1=exam05(k1lpha_03_xhe);
K2=exam05(k2lpha_03_xhe);
gamma_wi3=asind((abs(K1)-abs(K2))/ (2*sind(20)));
gamma_wi4=asind(-(abs(K1)+abs(K2))/ (2*cosd(20)*cosd(gamma_wi3)));
其中,k1lpha_03_yhe用于存储参数检测模块检测的经重组和修正处理后的轴加速度数据;1和2分别为车轮左右转动相同角度ki、-ki时,参数检测模块检测的经exam05()函数滤波求平均数处理后的轴加速度数据。
3.4 人机交互界面
通过MATLAB自带的GUI模块设计的人机交互界面[8-9],如图4所示。

图4 基于MATLAB的轮载式四轮定位参数检测系统人机交互界面
人机交互界面包括串口通信参数设置区和四轮定位参数计算区。在串口通信参数设置区,点击“开始采集”按键后,系统实时接收上传的数据;点击“保存数据”按键后,接收的数据以设定的数据格式保存到文本文档。
一辆汽车的4个车轮都有独立的四轮定位标准数据范围。在四轮定位参数计算区,通过下拉菜单选择相应的计算项目,包括左前轮外倾/前束、右前轮外倾/前束、左后轮外倾/前束、右后轮外倾/前束、左前轮主销内倾/后倾、右前轮主销内倾/后倾等6个计算项目。点击“四轮定位参数计算”按键后,系统自动完成该车轮的四轮定位参数的实时计算和显示。
4 实验及结果分析
为验证基于MATLAB的轮载式四轮定位参数检测系统的功能及可靠性,以某车型为例,搭建实物系统测量该车型左前轮的外倾、前束、内倾和后倾等四轮定位参数。车轮参数检测模块安装位置如图5所示。

图5 车轮参数检测模块安装位置
车轮参数检测模块接通电源后进入正常的工作状态。首先,打开人机交互界面,在串口通信参数设置区输入串口参数:端口选择COM4,波特率为9 600,数据位为8,校验位为无校验,停止位为1位,并点击“开始采集”按键,MATLAB开始接收数据;然后,在四轮定位参数计算区的下拉菜单中选择相应的计算项目,并点击“四轮定位参数计算”按键,MATLAB对车轮参数检测模块上传的车轮三维加速度数据进行实时计算,并给出四轮定位参数曲线图,如图6所示。

图6 左前轮四轮定位参数曲线图
由图6可知,该汽车左前轮的外倾、前束、内倾和后倾角分别为0.9°、0.2°、8.5°、-0.8°,与其车型数据手册描述相符。
5 结论
基于MATLAB的轮载式四轮定位参数检测系统工作可靠,满足快速、准确测量四轮定位参数等技术设计要求,方便汽车4S店或汽车检测站检测人员快速地进行四轮定位参数检测。
[1] 王飞龙,刘晓东,丁永亚.四轮定位对车辆跑偏影响及应对措施[J].汽车电器,2022(6):78-79;81.
[2] 张立军.浅谈汽车四轮定位检测[J].时代汽车,2019(10):157-158.
[3] 潘梦鹞,陈少伟,林土胜,等.汽车四轮定位参数姿态测量方法研究[J].中国测试,2021,47(5):129-135.
[4] 肖雨,朱黎,谭建军,等.基于CC2530的远程可调直流稳压电源设计[J].现代电子技术,2022,45(18):111-116.
[5] 罗雪雪,陈敏,朱泉水,等.基于ZigBee和CC2530的无线温湿度数据采集和存储模块研究[J].科技创新与生产力,2021(4): 66-68;71.
[6] 高益,郭峰林,戴立.基于加速度传感器MMA8451的滑坡监测系统设计[J].武汉轻工大学学报,2015,34(3):80-83.
[7] PAN Mengyao, CHEN Shaowei, LYU Xiaoyong, et al. Error analysis on parameters measurement model of wheel-mounted four-wheel alignment[C]. The 11th International Conference on Prognostics and System Health Management. Jinan:Institute of Electrical and Electronics Engineers Inc, 2020:592-598.
[8] 常世杰,杜云明,田思庆.基于Matlab GUI的PID参数整定平台开发[J].中国科技信息,2021(16):91-92.
[9] 张学军.基于MATLAB GUI的环境温湿度检测上位机设计[J].电子制作,2021(22):77-78;17.
Wheel Loaded Four Wheel Positioning Parameter Detection System Based on MATLAB
CHEN Shaowei1PAN Mengyao1ZHAO Juan1LIU Yuqing2
(1.Guangdong Polytechnic of Industry and Commerce, Guangzhou 510510, China 2.Guangzhou Motor Vehicle Inspection Industry Association, Guangzhou 510410, China)
Regular four wheel alignment parameter testing of cars can avoid issues such as tire bursts and unstable driving. This article proposes a wheel mounted four wheel positioning parameter detection system based on MATLAB, which combines technologies such as three axis acceleration sensor, ZigBee communication, and MATLAB software to achieve real time reading and rapid calculation of three dimensional wheel acceleration data, and obtain four wheel positioning parameters. This system has the characteristics of simple structure, accurate parameter measurement, and friendly human computer interaction, and has certain market promotion prospects.
MATLAB; four wheel positioning; three dimensional acceleration; ZigBeecommunication
TP31
A
1674-2605(2023)04-0008-05
10.3969/j.issn.1674-2605.2023.04.008
基金项目:2021年广东省普通高校创新团队项目(2021KCXT076)
陈少伟,男,1987年生,硕士研究生,讲师/工程师,主要研究方向:机电液智能测控。E-mail: 1251571695@qq.com
潘梦鹞,男,1970年生,博士研究生,教授级高级工程师,主要研究方向:机动车检测技术。E-mail: 3345008640@qq.com
赵娟,女,1989年生,硕士研究生,讲师,主要研究方向:机械设计及自动化。E-mail: 2031334248@qq.com
刘育清,男,1965年生,学士,高级技师,主要研究方向:机动车检验检测。E-mail: 2567487305@qq.com
陈少伟,潘梦鹞,赵娟,等.基于MATLAB的轮载式四轮定位参数检测系统[J].自动化与信息工程,2023,44(4):41-45.
CHEN Shaowei, PAN Mengyao, ZHAO Juan, et al. Wheel loaded four wheel positioning parameter detection system based on MATLAB[J]. Automation & Information Engineering,2023,44(4):41-45.