中国植保无人机及其施药关键技术的研究现状与趋势
2023-09-08陈盛德廖玲君徐小杰陈威任黎志宏周志艳兰玉彬
陈盛德,廖玲君,徐小杰,陈威任,黎志宏,周志艳,兰玉彬
[华南农业大学电子工程学院(人工智能学院)/国家精准农业航空施药技术国际联合研究中心/工程学院/岭南现代农业科学与技术广东省实验室,广州 510642]
我国地域辽阔,地理及气象条件多样,农业病虫草害具有多发、重发、频发的特点,严重威胁我国农业生产和国家粮食安全,而且随着全球气候变暖和农田生态条件变化,农作物病虫害呈逐年加重趋势,病虫害发生次数更加频繁,发病范围逐年扩大[1-2]。据全国农技推广网分析评估,预计我国小麦、水稻、玉米、马铃薯等主要粮食作物重大病虫害呈重发态势,全国发生面积约1.35亿hm2,比2022年和2017-2021年均值分别增加29.5%和10.6%,如不采取有效防控措施,潜在产量损失将达17.5 亿t 以上[3]。而据农业部门统计数据显示:我国手动植保机具约35个品种,担负着全国农作物病、虫、草害防治面积的70%以上[4],防治任务十分艰巨。因此,突发性农业重大病虫害已经成为我国农业生产稳产高产的重大威胁,加之近年来因农村劳动力大量转移造成劳动力严重不足的问题,亟需建立更加高效的新型现代化植保体系[5-6]。
而近年来,我国农业航空产业发展迅速,特别是农业航空的重要组成之一的植保无人机的迅猛发展和应用引起了人们的广泛关注[7]。植保无人机航空施药作业作为我国的新型植保作业方式,和传统的人工施药和地面机械施药方法相比,具有效率高、农药利用率高的特点,可有效解决高秆作物、水田和丘陵山地人工和地面机械作业难等问题,是应对大面积突发性病虫害防治、缓解由于城镇化发展带来的农村劳动力不足、减少农药对操作人员的伤害等问题的有效方式[8-10]。且植保无人飞机采用低空低量喷施方式,飘移少,可空中悬停,与RTK 高精度定位系统配合可实现精度较高的位置定位,旋翼产生的向下气流有助于增加雾流对作物的穿透性,提高防治效果[11-12]。因此,植保无人机已成为国内农业航空一支重要的植保力量。
植保无人机作为一项创新技术,经过几年的快速发展,已经对人们的社会生活和农业生产产生了深远影响。目前,我国城市化进程快速发展,越来越多的劳动力走向城市,集约化农业将是我国农业发展的必由之路[13],研究人员、农业工作者正在利用这一先进的工具来推进现代农业和精准农业的发展,航空作业技术的优势在农业中的作用将会得到更加广阔的发展,市场潜力巨大。在巨大的市场需求驱动下,近年来我国农用植保无人机生产企业急剧增加,植保无人机及其施药作业关键技术得以快速发展。为全面、深入地了解中国植保无人机及其施药作业关键技术的发展现状及未来趋势,本研究对我国植保无人机的发展进行了概述,并对植保无人机作业关键技术的研究现状进行了阐述和分析,指出了植保无人机施药作业关键技术的未来发展趋势,以期为科研机构和企业的科学研究提供参考,促进和推动我国植保无人机施药技术的快速发展和应用。
1 我国植保无人机的发展
早在2004年,我国农业农村部(原农业部)、科技部就认识到水稻病虫害防治任务的艰巨性,尤其在南方地区田块比较分散,大规模的有人驾驶飞机喷洒农药的方式存在不适合、防治难度大等问题,开始呼吁并推动我国农业行业重视农用无人机植保。2008年,科技部“863”计划便开始了农用无人机植保的研究和推广,由农业农村部南京农业机械化研究所、中国农业机械化研究院、中国农业大学、南京林业大学、总参谋部第六十研究所等单位共同承担的科技部国家“863”计划项目“水田超低空低量施药技术研究与装备创制”正式启动实施,这一项目的实施,标志着国内科研机构正式开始探索植保无人机航空施药技术与装备研发。2010年第一架商用的植保无人机交付市场,正式掀开了中国植保无人机产业化的序幕[14-15]。
近年来,相比有人驾驶飞机航空施药,无人机航空植保施药技术的研究和应用发展迅速,农用无人机航空喷洒系统、低空低量喷洒技术、RTK 精准导航、动态变量喷洒、视觉环境感知等技术在中国均取得突破性进展,并被应用于各种农作物的航空施药作业中。为加快推进植保无人机航空施药应用技术的研究与推广,华南农业大学、农业农村部南京农业机械化研究所、中国农业大学等全国各科研院校及深圳大疆、安阳全丰、广州极飞和深圳高科新农等各无人机企业单位积极在全国各地针对不同作物开展试验演示和技术推广。从2016 年国家设立了国家重点研发计划项目“地面与航空高工效施药技术及智能化装备”开始,华南农业大学精准农业航空团队先后在云南、湖南、新疆、河南等多地开展针对果树、水稻、棉花、小麦等多种作物的无人机航空施药技术应用试验研究60 余次,对植保无人机航空施药技术的发展起到了极大的促进和带动作用。另外,为促进我国航空植保产业快速、健康、有序发展,2016年5月,河南安阳全丰航空科技有限公司和华南农业大学共同发起并组织40多家农用无人机企业成立了国家航空植保科技创新联盟,这是正式开启中国植保无人机航空施药技术应用发展的里程碑;2016年8月,陕西省2万hm2玉米黏虫病害大爆发,联盟组织多家联盟成员并迅速调动100余架植保无人机开展紧急防治救灾工作,此次救灾是国内植保无人机航空施药作业的首次协同作战,标志着我国应用植保无人机进行大规模病虫害防治进入新的篇章[16]。在2016-2021 年间,联盟先后组织多家成员单位分别在河南、新疆、黑龙江、吉林、广西等地开展多次针对小麦、水稻、棉花及马铃薯等主要农作物的测试作业,以加强科研院校与企业之间的产学研合作,推进植保无人机航空施药技术的应用和推广(图1)。在国家政策扶持方面,2015年农业农村部安排在湖南与河南2个省开始首次试点农机补贴资金补贴植保无人机,这标志着植保无人机兼具农业机械功能与无人驾驶航空器特征的农业生产应用领域的新型产品,开始纳入农业机械产品系列的植保机械应用管理;2021 年4 月,农业农村部办公厅、财政部办公厅发布《2021-2023年农机购置补贴实施指导意见》,正式将植保无人机纳入补贴制度,自此植保无人机在全国作为农机补贴产品或农机新产品,步入了推广销售与作业应用快速发展的轨道[14]。据统计,截至2021年底,我国植保无人机保有量已超过16万架,累积作业面积超过9 300万hm2。
相比有人驾驶农用飞机,植保无人机作业机型类型则较多,包括油动单旋翼、油动多旋翼、电动单旋翼、电动多旋翼等多种类型。国内用于植保作业的农用无人机产品型号及品牌众多:按升力部件类型来分,主要有单旋翼无人机和多旋翼无人机等类型;按动力部件类型来分,主要有电动农用无人机和油动农用无人机等类型[17]。但由于单旋翼无人机结构较为复杂,价格较高,难以维护,且其操控难度较多旋翼无人机机型大,对用户的操作水平要求较高,因此,目前市场上常见的植保无人机应用机型主要是多旋翼电动无人机。当前,多旋翼植保无人机药箱载荷量多为20 L,部分机型载荷量可达30 L;且多旋翼植保无人机主要以电池为动力,较油动无人机载荷少,但其智能化程度高;目前,各主流企业已实现和集成了无人机航线自动规划、一键起飞、全自主飞行、RTK差分定位、断点续喷、仿地飞行、自主避障和夜间飞行等多种自主作业功能(表1),为植保无人机的应用提供了广阔的施展空间。

表1 植保无人机技术发展情况Table 1 Technology development of plant protection UAV
2 植保无人机施药关键技术研究现状
2.1 航空变量施药技术
与传统大容量喷雾技术相比,变量喷施技术可以缓解农药过量使用的问题,在节省农药的同时降低了喷雾过程中雾滴发生飘移的风险,提高农药的使用效率以及减轻农药对环境的污染。因此,航空变量施药技术作为实现精准施药的重要手段,其通过获取田间病虫草害面积、作物行距及株密度等靶标作物的相关信息,以及实时获取施药设备位置、作业速度、喷雾压力等施药参数的相关信息,综合处理作物和喷雾装置的各种信息从而根据需求实现对靶标作物的精准施药[18]。
朱航等[19]首次尝试了将脉宽调制(PWM)技术应用于植保无人机,开发了基于PWM 技术的无人机精确喷洒系统,并根据地面农作物遥感信息建立的精确喷洒决策系统进行了无人机精确喷洒系统试验。结果表明,脉宽调制控制技术可以实现对无人机喷施系统的精确控制,系统具有一定的可靠性和实用性。王玲等[20]在搭建适用于无人机的PWM 变量喷施系统的基础上,开发了基于LabWindows/CVI的地面测控软件,通过无线脉冲信号实现对机载喷施系统中泵的脉宽调制调速,从而改变系统压力及流量,实现了无人机喷雾的变量调节。王大帅等[21]针对植保无人机施药系统控制方式单一,施药流量无法根据飞行参数自动调整造成的雾滴分布不均匀、重喷、漏喷等问题,通过多传感器融合技术实现施药参数的实时动态监测,设计了基于施药流量与飞行速度自动匹配的PWM 的施药流量控制系统,并通过3CD-15型单旋翼无人机平台对动态变量施药系统实际作业性能及施药效果进行了测试,试验结果表明该动态变量施药系统可实现施药流量与飞行速度自动匹配。刘洋洋等[22]为保证单位面积施药量的一致性、实现施药流量的实时控制,提出了一种航空变量施药分级控制算法,并基于该算法设计了基于单片机多信息融合的航空变量施药实时监控系统,通过试验结果表明该系统可准确监测多种作业参数,并可根据参数变化精准调控施药流量。另外,为避免植保无人机喷施作业时农药利用率低、造成环境污染等问题,华南农业大学国家精准农业航空施药技术国际联合研究中心在自主研制的PID-PWM 控制的植保无人机变量喷雾系统基础上,充分利用团队的多旋翼植保无人机作业数据集,训练影响雾滴沉积量的飞行因素、环境因素、机身结构参数以及病虫害严重等级参数与雾滴沉积量之间的非线性关系模型,并开发了基于神经网络决策的植保无人机变量喷雾系统(图2),经测试验证其实际雾滴沉积量满足处方值要求,且响应时间低于0.25 s[23]。变量施药技术在植保无人机上的应用为农业航空精准喷雾控制技术的发展提供了参考方向,目前深圳大疆创新科技有限公司、广州极飞科技有限公司、安阳全丰航空植保科技有限公司等相关企业均纷纷推出相关产品和技术,但目前的植保无人机变量施药技术主要是根据作业参数的变化或预设作业过程中喷施流量的变化等信息进行变量喷施,并没有根据作物病虫草害面积及发生程度、作物密度等靶标作物的生长信息来实现植保无人机变量喷施的目的,缺乏真正能结合作物生长处方信息的变量决策系统。

图2 航空变量喷雾系统Figure 2 Aerial variable-rate spraying system
2.2 航空静电施药技术
航空静电喷雾技术是传统的地面静电喷雾技术在植保无人机喷施系统上的创新应用[24-25],在航空喷施作业过程中,利用高压静电在喷头和喷洒作物目标之间建立静电场,使得药液流经喷头雾化后被充上和喷嘴极性相同的电荷。根据静电感应原理,地面作物表面将引起和雾滴极性相反的电荷。由于同性电荷相互排斥,异性电荷相互吸引,因此荷电雾滴将在静电场力和其他外力的共同作用下,向地面作定向运动并最终吸附在靶标作物植株的各个部位[26-27]。静电喷雾技术不仅可以使雾滴吸附到作物叶片的正面,而且还能吸附在作物植株的中下部和叶片背面,提高药液雾滴沉积率的同时减少雾滴飘移,改善施药区域周围的生态环境。
茹煜等[28]针对XY8D 型无人机进行了静电喷雾系统整体设计,并就该系统在水稻田中开展了静电喷雾和非静电喷雾条件下雾滴沉积试验研究,试验结果表明静电喷雾方式对增加雾滴沉积具有明显的效果。此次试验是静电喷雾系统在无人机植保作业上的首次尝试,静电喷雾技术在植保无人机上的应用还有待进一步研究。为此,金兰等[29]针对AF-811 型单旋翼无人直升机设计了一套航空静电喷雾系统,并进行了有效喷幅和雾滴沉积效果试验研究,研究结果表明,无人机静电喷雾增加了农药在目标上的附着率,减少了雾滴的飘移,起到了更好地保护生态环境的效果。同样,蔡彦伦[30]以F-50 型植保无人直升机飞行平台为基础,开发出新型接触式静电喷雾系统;并对不同荷电方式的喷雾沉积效果进行试验比较,结果表明:静电喷雾可以提供药液在植物上层和中层的沉积量,而且接触式荷电和感应式荷电都可以提高航空喷雾的沉积均匀性,接触式荷电的沉积均匀性更优。廉琦[31]以YG20-6 型多旋翼植保无人机为载体,设计了一套应用于植保无人机的静电喷雾系统,并通过静电喷雾系统的最佳作业参数对无人机静电喷雾效果进行了室外效果试验,试验结果得出,雾滴在采集装置上的平均沉积密度为上部133.8 个·cm-2、中部113.8 个·cm-2,相比于非静电喷雾,雾滴在上方的平均沉积密度提高13.6%,中部的平均沉积密度提高32.6%。华南农业大学国家精准农业航空施药技术国际联合研究中心为了探究电极材料对静电喷嘴雾化效果和荷电性能的影响和确定设计的静电喷嘴的最佳作业参数,以电极材料、电极电压、喷施压力和喷孔直径为喷施变量,针对自主研发的静电航空喷嘴进行室内雾化和室外沉积试验,结果表明,设计的静电喷嘴能有效提高植保无人机航空喷施雾滴沉积效果,增加喷嘴有效喷幅宽度(图3)[32]。

图3 航空静电喷嘴Figure 3 Aerial electrostatic nozzle
目前,植保无人机的有效载荷和成本是用户比较关注的重要参数[33]。由于静电喷雾作业时机身需要加装静电发生器、电池等配件,必然会减小植保无人机的有效载荷,从而导致植保无人机作业过程中出现频繁加药的问题,减少持续作业时间及降低作业效率;且目前市场上应用于植保无人机的静电喷雾系统价格普遍在1万元,静电喷雾系统将大幅度增加植保无人机的购机成本。因此,静电喷雾系统的重量及成本成为目前影响植保无人机静电喷雾作业技术发展的首要因素。另外,从上述研究可以看出,我国关于植保无人机静电喷雾技术的研究始于2015 年,起步较晚,由于目前市场上无人机机型多样,在硬件设计方面,静电喷雾系统的挂载方式及其作业标准有待继续开发和验证。
2.3 航线规划技术
当人为操控植保无人机进行喷施作业时,受操控人员及环境等因素的影响,人为即时飞行航线与理想航线难以保持一致,极易导致无人机作业漏喷率和重喷率偏高等问题,从而影响植保无人机喷施作业效果;且由于无人机能量和载荷限制,植保无人机因电量不足而发生坠机等情况时有发生[34-35]。因此,随着GIS 与GPS 技术的普及和传感器技术的发展,航线规划技术已成为植保无人机智能作业技术中最基本的组成部分。进行合理的作业路径规划可有效提高植保无人机的续航能力,降低对操控人员的技术要求,从而进一步提高植保无人机的作业效果和作业效率。
为尽可能地减少飞行总距离和多余覆盖面积,节省无人机的能耗和药液消耗,徐博等[36]研究了一种基于作业方向的不规则区域作业航线规划算法,该算法根据指定的作业方向,可快速规划出较优的作业航线,使整个作业过程能耗和药耗最优;针对植保施药多个作业区域的情况,他还提出了一种植保无人机全局航线规划算法,从作业路程、多余覆盖和遗漏覆盖的角度确定了无人机在单区域内的覆盖方式,并基于改进的遗传算法得到区域间的优化作业顺序和区域间的调度航线规划[37]。为了使植保无人机作业更精准、高效与节能,王宇等[38-39]分别基于引力搜索算法和改进蚁群算法研究了适用于三维地形的植保无人机路径规划方法;同样,为实现植保无人机在丘陵山地区域的作业效率最大化,范叶满等[40]以山地果园为研究区域、以植保无人机飞行能效系数为约束条件,基于无人机功率与升力模型设计了可用于无人机三维路径规划的模拟退火算法,并分别对植保无人机在山地区域作业时的最优作业路径进行了规划和验证。黄小毛等[41]针对同一区域内相邻多田块的无人机单机作业任务路径规划问题,从续航、负重等实际问题出发,提出并实现一套含障碍物多田块条件下单机多架次作业的农用无人机自主飞行作业的路径规划算法;在此基础上,针对含障碍物多田块条件下的多台无人机作业路径规划问题,研究提出了一套完整的多无人机协同作业路径优化算法解决方案[42]。华南农业大学国家精准农业航空施药技术国际联合研究中心基于自主恒速飞行和最小转弯半径约束的无人机转弯掉头策略,分析并设计了任意凸多边形作业区域下无人机的路径规划方法,提出了基于幅宽微变的航线归整法路径规划方案,并对结构化农田区域实现全区域覆盖条件下的路径进行了规划与优化选择[43](图4);另外,团队还针对植保无人机作业时无法覆盖大规模区域中多个分散田块的问题,提出了一种基于多架植保无人机作业过程中与补给车辆之间的联合路径规划和调度方法,并通过试验验证该方法可以有效节省多架植保无人机及补给车辆的作业时间,缩短非喷施作业的飞行距离,提高作业效率[44]。
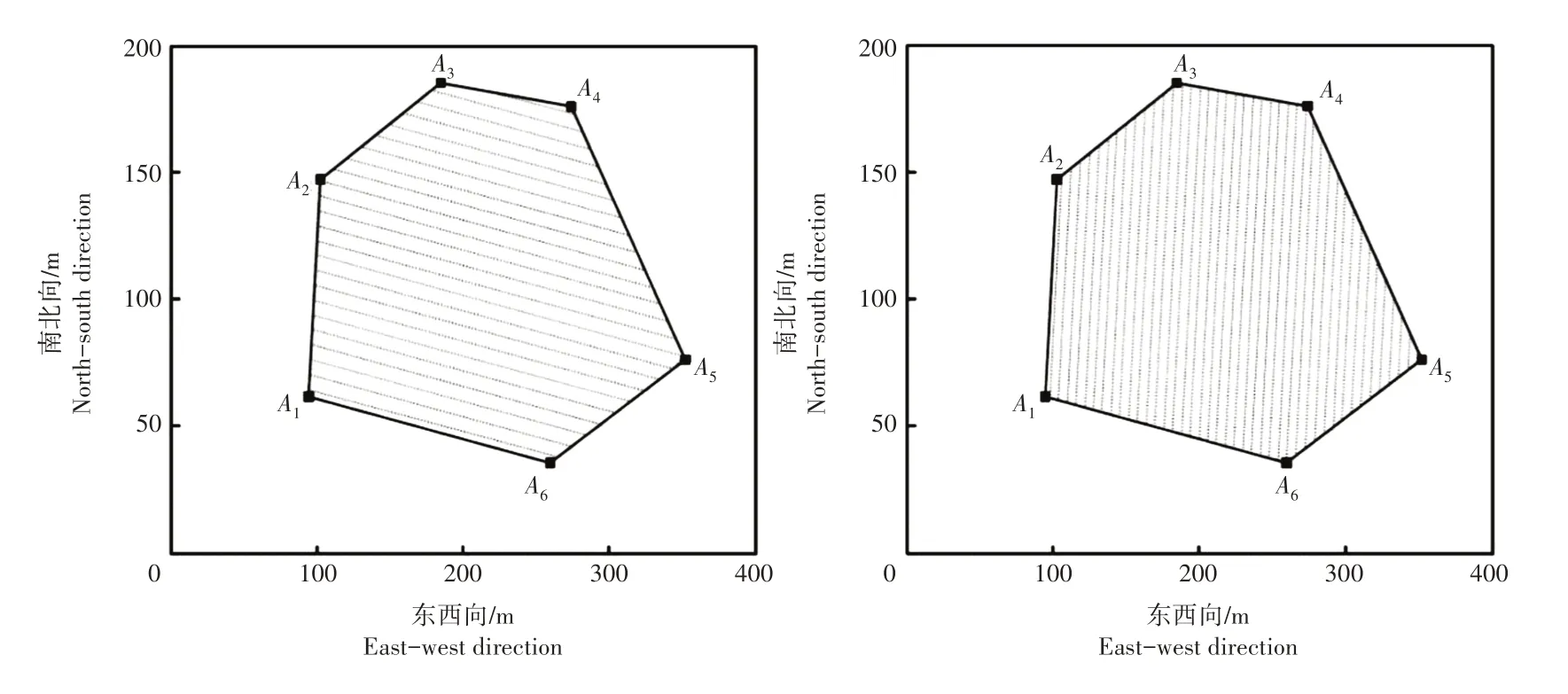
图4 不同作业方向下的飞行航线[43]Figure 4 Flight routes in different operation directions
目前,研究者们分别从作业区域形状、作业路径长短、续航时间等多个因素中的某一个或两个因素对植保无人机航线规划进行了研究,并未综合多个因素来考虑植保无人机作业的航线规划问题;另外,从航线规划方面的研究趋势可以看出,随着RTK 高精度定位技术的发展和应用,植保无人机航线规划的应用范围已从平面地形发展到三维地形,且正朝着多架植保无人机协同作业的方向发展。随着智慧农业时代的到来[45],面向多机协同作业及综合多个主要因素的航线规划问题值得继续深入研究。
2.4 自主避障技术
无人机自主避障技术指的是无人机本身能够自主识别障碍物类型并完成指定避障动作的核心智能技术。对于植保作业而言,当田间作业环境光照不足或飞机与飞手之间的距离较远时,若主要依靠人肉眼观察判断,作业受限因素多且危险性高,因此,随着人工智能技术的发展,实现障碍物的自主识别和实时避障已成为植保无人机智能化发展的重要组成之一[46]。
明宇等[47]通过搭载于植保无人机机身上的摄像机采集视频图像,经过图像预处理、图像分割、障碍物检测、避障策略等方法研究了一种基于视觉的植保无人机避障技术。程曦等[48]研究了基于双目视觉的植保无人机环境感知技术,基于灰度化点增强与滤波去噪增强提高图像质量,提出了基于边缘特征加强的特征匹配算法,并通过对去噪后的灰度图进行边缘检测、特征提取及k近邻特征匹配后,验证了算法对障碍物检测精度和检测速度上的有效性。另外,吴开华等[49]基于结构光视觉技术提出了一种障碍物检测新方法,当植保无人机作业过程中前方存在障碍物时,该方法通过光路的变化能够准确检测出障碍物的距离、角度、宽度,从而做出相应的绕飞动作,且能够有效检测出未知环境下障碍物的距离、方位角和宽度,距离检测误差小于0.06 m。孙柯等[50]针对植保无人机的避障问题,设计了一种基于毫米波雷达的植保无人机避障系统,并根据毫米波雷达障碍物检测回波中心在障碍物尺寸范围内变化的特点,设计了基于毫米波的障碍物检测算法,包括前方距离检测算法、侧方距离检测算法、宽度检测算法和障碍物危险程度排序算法,且通过静态试验和动态试验验证了该避障系统能够有效检测障碍物参数,对障碍物前方距离检测误差小于±115 mm,侧方距离检测误差小于±195 mm,宽度检测误差小于±235 mm。结合农田植保飞行环境和各类型传感器的优缺点,同时考虑准确性、实时性、可靠性和成本等因素,刘立臣等[51]采用毫米波雷达和双目视觉传感器相结合的方式对植保无人机前方的障碍物进行检测,通过毫米波雷达进行障碍物目标预警,再利用双目视觉传感器完成障碍物目标识别,最终采用基于预设航线的避障路径规划算法完成植保无人机对障碍物的避让并回归原本的作业航线。
从避障技术方面的研究可以看出,根据采用的传感器类型,目前应用在植保无人机的障碍物检测技术可以主要分为视觉检测技术(单目视觉和双目视觉)、毫米波雷达检测技术、超声波雷达检测技术、激光雷达检测技术及多传感器融合检测技术等。然而,由于我国农田作业环境复杂、障碍物类型多样,各种障碍物检测技术难以准确识别出农田障碍物的大小及与飞机之间的距离;且由于无人机飞行速度较地面农业机械行走速度更快,对障碍物识别及识别后做出相应的避障动作的实时性要求较高。因此,对于以山地、丘陵为主的我国南方地区,应用于植保无人机的自主避障技术仍需进一步研究。
2.5 航空施药效果检测技术
在植保无人机航空施药过程中,作业环境的复杂性和作业参数的多变性导致了雾滴运动轨迹及沉积分布结果难以预料[52],因此,地面药液的沉积效果和分布特性成为了指导航空施药喷施的重要参考。为快速的检测雾滴沉积分布情况及更好地理解植保无人机航空喷施雾滴沉积分布特性,施药效果检测是植保无人机航空施药技术中的重要组成部分,是航空喷施作业中获取雾滴沉积数据必不可少的技术手段。
为了检验农田作业航线的人为即时规划情况和评价实际作业质量及效果,彭孝东等[53]设计了基于GPS 的坐标采集无线传输系统,以水稻田边界直线为参照,通过目视和经验遥控无人机分别进行循直线飞行试验和基于作业幅宽的航线规划飞行试验。结果表明人为即时规划的航线与理论航线偏离严重,在理想喷雾条件下估算出的作业遗漏率为17.1%,重复作业占8.2%,区域外浪费占0.7%。王昌陵等[54]提出了一种无人机施药雾滴空间质量平衡测试试验方法,即在无人机作业时的底部、上风向部、顶部和下风向部不同位置布置雾滴收集装置以分析其雾滴沉积情况,该方法为植保无人机雾滴沉积分布研究提供了新的试验检测方法,有助于更好地理解植保无人机在不同作业参数下航空喷施雾滴的沉积分布特性。华南农业大学国家精准农业航空施药技术国际联合研究中心为对比不同类型和不同控制方式的植保无人机航空喷施作业的飞行质量和作业效果,采用团队研发的微轻型机载北斗导航定位系统对半自主飞行控制模式下单旋翼油动植保无人机、单旋翼电动植保无人机和四旋翼电动植保无人机以及全自主控制模式下四旋翼电动植保无人机的飞行质量(包括飞行参数均匀性、航线精度和航线长度均匀性)进行了分析和评价(图5),为植保无人机作业效果的改进提供数据支持和指导[12]。
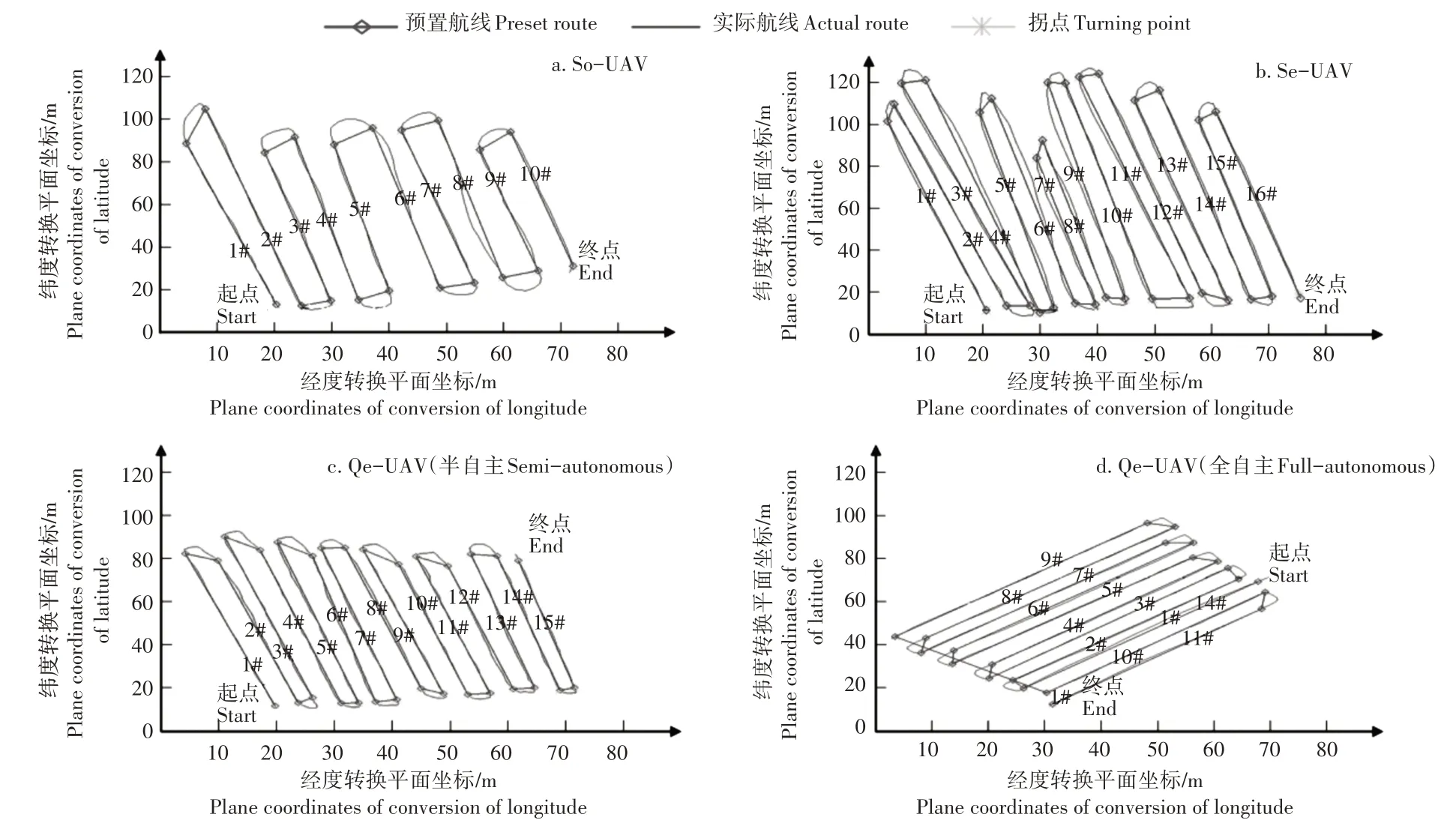
图5 植保无人机飞行轨迹偏差测试Figure 5 Flight path deviation test of plant protection UAV
另外,为实现对植保无人机航空施药雾滴地面沉积效果的快速获取,张京等[55]使用红外热像仪与无人机联用测试喷雾前、后作物冠层温度,通过温度变化率反映雾滴在水稻冠层的沉积效果。结果表明,以雾滴沉积量与冠层温度变化率为评价指标得到的结果一致,红外热成像技术可以准确反映雾滴在水稻上的沉积规律。郑永军等[56]基于激光雷达反射波的原理建立了航空施药雾滴检测方法,利用反射波信息来识别目标雾滴,并提取雾滴的位置坐标来反映雾滴在空间的分布情况,通过风洞试验和田间试验发现,该方法测量雾滴沉积结果的相对误差小于7%,可有效应用于航空施药雾滴检测。张瑞瑞等[57]基于变介电常数电容器原理和传感器网络技术设计了航空施药雾滴地面沉积实时检测系统,对系统进行了应用测试,并参照水敏纸图像处理方法数据对系统的测量数据进行了分析,分析结果表明,该系统在航空施药雾滴沉积均一性、有效幅宽等测量方面具有较大的实用性。同样,华南农业大学国家精准农业航空施药技术国际联合研究中心基于共平面插指式电容器原理设计了一种实时检测农业喷洒无人机农药雾滴喷洒效果的传感器(图6),该传感器由共平面插指式电容器、高频振荡器、测频模块和数据处理模块组成,其测量精度可达0.1 ug·cm-2,单点测量速度可达10 μs。该传感器不仅能够测量农药雾滴沉积量,而且还可以观测到农药雾滴沉积和蒸发的全过程。这些研究与传统地面检测技术相比,缩短了实际试验的检测周期和简化了实际试验检测过程,有助于加速航空施药技术的应用推广和提高航空施药技术的应用效果[58]。

图6 雾滴沉积量检测传感器Figure 6 Droplet deposition detection sensor
雾滴沉积分布效果是衡量植保无人机航空喷施作业性能好坏的最重要和最直接的指标。从上述研究可以看出,围绕航空喷施雾滴沉积分布效果测试,研究人员主要从植保无人机飞行作业模式及雾滴传感器检测等方面开展了大量研究。飞行作业模式能够体现出植保无人机飞行效果,却无法体现药液雾滴的沉积分布效果[59-60];雾滴传感器能反映植保无人机在某一状态下及作业区域内某一位置处的雾滴沉积结果,但难以反映出植保无人机在整个作业过程及作业区域的喷施作业效果。因此,为得到理想的雾滴沉积效果,需对航空喷施雾滴沉积分布与飘移规律开展深入研究,以指导植保无人机航空喷施作业。
3 植保无人机施药技术发展趋势
3.1 航空变量施药决策系统
植保作业的最基本要求是具有理想的防效;同时,提高农药的有效利用率、减少农药用量也是对植保技术未来发展的必然要求。植保无人机航空变量喷施技术是实现这一要求的有效手段,其主要思想就是可以根据农作物的生长需求来实现对目标作业区域进行精准施药[16]。目前,一些植保无人机在硬件上已基本可以实现变量喷施的功能,其变量作业主要是通过人为预先设定好不同区域内的施药量而进行喷施作业,难以达到真正意义上的变量喷施。作为植保无人机变量施药系统的“大脑”,航空变量施药决策系统的相关研究才刚刚起步。航空变量施药决策系统主要是通过实际检测不同采样点的病虫害类别或农田植株的生长趋势,生成相应病虫草害作业处方图和最佳喷施处方图来指导变量施药系统进行作业,在实际作业过程中,决策系统实时采集各执行机构的状态以及所处经纬度位置,并将这些采集的信息与处方图信息进行对比,从而确定施药量,有效保证了喷施的精准性。因此,如何通过航空变量施药决策系统来提高植保无人机喷施作业的智能化水平将是未来重要的研究趋势之一。
3.2 多机协同作业技术
随着农业规模化生产的迫切需求及植保无人机施药应用的广泛开展,单机作业逐渐难以满足人们对高效率的现代化生产的要求。为了弥补单机作业的缺陷,多机协同作业技术也开始得到农用无人机行业的关注。多机协同作业,即在单机作业的基础上,实现多架无人机智能联网,这需要每个无人机之间能够作为一个整体协调工作,以便有效地覆盖大面积区域并进行信息交互与协同作业。随着物联网及大数据技术的发展,多机协同作业将从较大程度上节约劳动力成本,提高植保无人机航空喷施作业的效率,有效加快植保无人机智能化航空施药技术的推广和应用。
3.3 航空施药作业专家系统
植保无人机施药因其雾化程度高,雾滴粒径小,且存在飞行速度较快而造成的相对风场和无人机旋翼风场等因素的影响[61],导致航空喷施雾滴沉积区域不稳定、运动规律不明确等问题。目前,国内对各种类型的植保无人机在施药过程中雾滴沉积与飘移规律的研究还处于初步阶段。我国植保无人机机型多样、作业条件复杂及作业种类繁多,未来的研究需要针对多类型的植保无人机在不同气象条件和作业参数下的农药雾滴沉积与飘移规律进行研究,并基于雾滴沉积与飘移规律建立植保无人机航空施药作业专家系统,使用户在施药作业前就可以根据植保无人机类型及作业要求选择适宜的作业参数,以取得较佳的喷雾作业效果。
3.4 植保无人机配套施药技术
植保无人机航空施药具有低容量高浓度、药液雾化程度高、雾滴易飘失等特点,因此,为保障植保无人机施药技术的有效应用,相应的配套技术具有巨大的研究潜力和发展空间,如植保无人机专用航空喷嘴研发技术、专用航空药剂及航空助剂研发技术等。其中,航空喷嘴包括静电喷嘴、可控雾滴粒径谱喷嘴、变量喷嘴等[62],航空药剂包括超低容量液剂、纳米生物制剂等,航空喷雾助剂包括改性植物油助剂、有机硅助剂等。这些技术的研发与应用将有效减少航空喷施雾滴的飘移与流失,促进农作物对药液有效成分的吸收,为植保无人机的精准喷施提供有力的保障。
4 结语
加快植保无人飞机的推广应用是我国现代农业建设的需要。目前,作业实践已经证明,植保无人机及其施药技术由于在不受作物长势和地势限制、提高作业效率、节本增效等方面具有不可替代的优势,在我国取得了极大的进步和应用。随着经济的发展,中国面临着人口老龄化和城镇化发展带来的农村劳动力不足的严峻形势,而且由于单体农户的小规模生产模式的存在,为了保障我国农业的稳定和可持续发展,加快实现农业机械化和现代化的进程,特别是山区与水田的全程机械化作业水平已经成为中国国家层面的发展战略,植保无人机及其低空低量施药技术取代传统人力背负式喷雾作业符合当前中国农业现代化发展的要求,在较大程度上提升了中国植保机械化水平。
另外,从日本等国外发达国家植保无人飞机的发展历程[63]以及国内的市场需求来看,植保无人机市场前景非常广阔,潜在的应用方面将不断拓展。植保无人机在中国是一个新兴产业,植保无人机及其施药技术与装备也处于不断发展之中,为保证植保无人机的健康发展和推广应用,深入研究植保无人机及其低空低量施药技术的迫切性不容忽视;同时,更好地理解和掌握植保无人机施药技术会有助于植保无人机及其喷施部件的设计和优化,促进农药的高效使用,对中国植保无人机市场的健康、有序发展具有重要的促进意义。
