基于圆的几何性质的无人机纯方位无源定位研究
2023-09-05李欣烨阮泳航
巴 蕾,李欣烨,阮泳航
(汕头大学数学系,广东 汕头 515063)
0 引 言
无人机无源定位在环境监测、应急救援、军事侦察与电子战等领域的应用越来越多,如何规划无人机路径以提高定位精度已成为国际研究热点问题之一[1].无源定位是一个系统的工作过程,其中定位算法是连接定位技术和算法性能分析之间的桥梁.
近年来,国内外诸多学者对于无源定位算法进行了深入的研究.其中,经典的无源定位算法主要有最小二乘算法(LS)、最大似然算法(ML)及扩展卡尔曼滤波算法(EKF)[2].这些算法中有很多都存在着缺陷,例如,ML 算法需要对测量误差的分布进行先验假设,但该假设仅适用于连续时间系统,对于离散时间系统而言并未得到其成立的证明[3].本文仅基于圆的几何性质建立纯方位无源定位模型,相较于上述算法,在限制条件较少的情况下仍然保持较高的定位精度.
本文的结构编排如下:第一节进行前提假设,第二节主要是纯方位无源定位模型的建立过程,第三节分析了定位模型中所需发射信号无人机的最小数量,第四节构建了无人机群的调整模型,最后在第五节对上述工作进行了总结.
1 前提假设
现有10 架无人机组成圆形编队并保持在同一高度上,其中编号FY00 位于圆心,其余9 架无人机(FY01~FY09)均匀分布在某一水平方向的圆周上(见图1).
作以下假设:
(1)各无人机高度保持一致,仅考虑二维情况;
(2)各无人机仅依靠方向信息(规定为接收信号的无人机与任意两架发射信号无人机连线之间的夹角)进行定位与调整,排除其他因素的干扰;
(3)记接收信号的无人机收到FY00 与FY01 发射的夹角大小为α1,收到FY00 与FY0A(第三架发射信号的无人机)发射的夹角大小为α2,收到FY01 与FY0A 发射的夹角大小为α3(单位:(°),见图2);
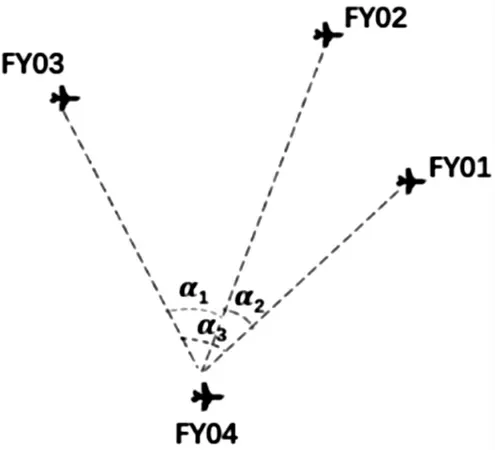
图2 无人机接收到的方向信息示意图
(4)无人机圆形编队的半径为R.
2 定位模型
这一节在无人机FY00 和另2 架编号已知的无人机发射信号且位置皆无偏差,其余位置略有偏差的无人机接收信号的情况下,建立接收信号的无人机的定位模型.
2.1 平面直角坐标系的建立
由于发射信号的无人机编号已知,不妨设圆周上的两架无人机中的一架编号为FY01,另一架编号为FY0A(2≤A≤9).以FY00 作为原点,FY00-FY01作为x 轴的正方向建立平面直角坐标系.
记FY0A 的坐标为A(x1,y1),接收信号的无人机为FY0B(2≤B≤9 且B≠A),FY0B的坐标为P(x,y).
2.2 无人机定位模型建立
过FY00,FY01,P三点作圆O1,过FY01 所在点作FY00-FY01的垂线,记垂线与圆O1的交点为P'(P'≠FY01),由圆周角定理[4]得在点P' 接收到的角度值也为α1,O1位于FY00-P'的中点,坐标为圆O1的方程如下:
同理,FY00,FY0A,P过三点作圆O2,过FY0A 所在点作FY00-FY0A 的垂线,记垂线与圆O2的交点为P"(P"≠FY0A),得在点P"接收到的角度值也为α2.设O2的坐标为(x0,y0),可以得到kOA·kAP"=-1,即
联立方程(2)和(3)解得:
当2≤B≤5时,
当6≤B≤9 时,
于是可以得到圆O2的方程如下:
联立圆O1和圆O2的方程(1)和(4),解得x,y 如下:
式中的a,b,c,d 表示如下:
解得(x,y)即接收信号的无人机(图中点P)的位置坐标,如图3 所示(图中取A=2):
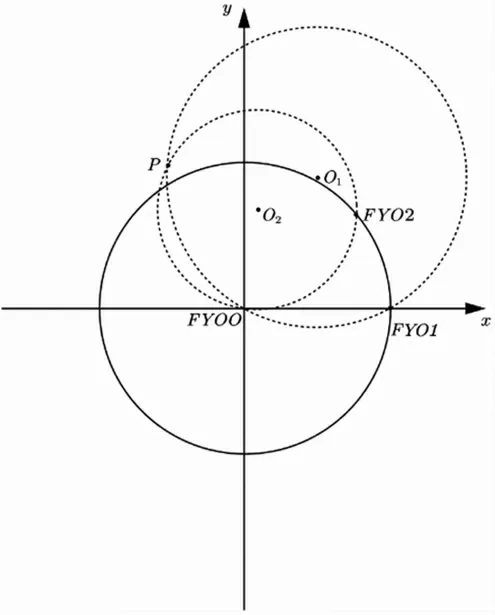
图3 接收信号的无人机位置图
任选三架无人机发射信号,计算出α1,α2,将其代入式(5),计算可得接收信号的无人机的坐标.
3 无人机数量的最小化
这一节研究在选取无人机FY00 和FY01(位置无偏差)发射信号后,还需要几架位于圆周上未知编号的无人机(位置无偏差)发射信号以完成对其余无人机的有效定位.通过接收到的方向信息确定第三架发射信号的无人机的编号(记为FY0A),以FY00,FY01,FY0A 为发射信号的无人机,利用定位模型,实现对接收信号的无人机的定位.
称无人机在圆周上均无位置偏差时接收到的方向信息为标准角,此时分别记的α2,α3值为aij,bij.另外,α2,α3在实际情况下的值记为a'ij,b'ij.(其中i,j 分别为FY0A 与接收信号的无人机的编号)
接下来以FY03 为接收信号的无人机的情况为例,说明确定第三架发射信号的无人机的步骤:
Step1:FY03 接收到FY00 和FY0A(A=1,2,4,5,…,9)发射的方向信息ai3(i=1,2,4,5,…,9)的值如表1 所示:

表1 ai3(i=1,2,4,5,…,9)的值
Step2:记无人机实际接收到的角度与标准角之差的绝对值为δ.例如,FY03 接收到的α2=55,为了能在FY04,FY05 和FY02 之间确定第三架发射信号的无人机的编号,区间(50-δ,50+δ)与(70-δ,70+δ)不能相交,于是得到δ≤10.因此ai3'(i=1,2,4,5,…,9),的取值范围如表2 所示:

表2 ai3'(i=1,2,4,5,…,9)的取值范围
Step3:已知无人机FY03 接收到α1,α2,其中α1必位于区间(40,60),根据α2所在区间,判断第三架发射信号的无人机的可能情况.例如,当α2=55 时,可以确定第三架发射信号的无人机为FY05;当α2=33 时,可以判断出第三架发射信号的无人机为FY06 或FY09;
Step4:与Step2 同理,bi3'(i=2,4,5,…,9)的取值范围如表3 所示:

表3 bi3'(i=2,4,5,…,9)的取值范围
Step5:已知无人机FY03 接收到α3,根据α3所在区间,确定第三架发射信号的无人机的编号.例如,当α3=75 时,则可以最终确定第三架发射信号的无人机为FY06.
至此,已确定3 架发射信号的无人机为FY00、FY01、FY0A(2≤A≤9),然后用定位模型对接收信号的无人机进行定位.
4 调整模型
这一节根据无人机的初始位置(略有偏差),建立调整模型(在每次调整过程中,无人机FY00 和圆周上最多3 架无人机发射信号,其余无人机根据收到的方位信息调整位置),使无人机群在多次调整后均匀分布于某个圆周上.
4.1 调整模型的建立
这一节给出两种解决方法,这两种方法的区别是在每一次调整过程中对于发射信号的无人机的选取方式不同.两种方法的具体流程如图4 所示:

图4 两种方法调整流程
4.1.1 方法一
Step1:以无人机FY00 和FY0B(2≤B≤9)作为发射信号的无人机,FY01 作为接收信号的无人机,接收到的角度值记为βi(2≤i≤9).此外,记所有无人机均在标准位置时FY01 接收到的角度值为β'i(2≤i≤9),具体值如表4 所示:

表4 β'i(2≤i≤9)的数值
Step2:定义无人机FY0B(2≤B≤9)的角偏差率函数为:
Step3:找到角偏差率最小的作为无人机,记为FY0A. 以无人机FY00,FY01,FY0A作为发射信号的无人机,使剩余的无人机调整至新的位置,在该位置各无人机接收到的α1,α2均为标准角;
Step4:重复Step1~Step3 若干次,得到偏差较小的无人机群的位置.
4.1.2 方法二
随机生成2~9 的一个整数i,取A=i,以无人机FY00,FY01,FY0A 作为发射信号的无人机,使剩余的无人机调整至新的位置,在该位置各无人机接收到的α1,α2均为标准角.重复上述操作若干次,得到无人机组的位置.
相较于方法一,方法二的显著优点是计算量小,且需要的条件少.
4.2 调整模型的求解结果
根据初始坐标计算出无人机接收到的方向信息α1,α2,接着按照上述两种方法的步骤分别进行2 次迭代(取R=100 m).最终得到无人机组完成迭代前后的坐标对比如表5所示.

表5 无人机使用两种方法完成迭代前后的坐标
由表5 可知,对同一组初始坐标,在同样的迭代次数下,方法一的求解结果更接近标准位置的坐标.
4.3 误差分析
这一节采用的方法为迭代法,由于每次选择的第三架发射信号的无人机的位置都是略有偏差的,每次调整之后的无人机组的位置都会存在一定偏差.
设偏差率sn为无人机组在第n 次调整后角偏差率fi之和,即:
表6 第n 次迭代后的值

表6 第n 次迭代后的值
迭代次数方法一误差s(1)n方法二误差s(2)n 0 0.0280.028 1 0.0010.010 2 0.0010.011
由表6 可知,随着迭代次数的增加,方法一的误差逐渐减小,而方法二的误差没有明确的变化趋势.方法一相较于方法二误差较小,说明该方法的迭代效果良好,即方法一的调整效果较好,有一定的参考价值.
4.4 灵敏度分析
随机生成多组数据作为无人机组的初始位置.表7 中显示了其中1 组数据,此外对随机生成的数据进行较大修改,对修改前后的数据都用方法一和方法二进行位置调整.

表7 无人机初始位置和调整结果
使用方法一分别对两组数据进行位置调整(迭代次数均为2),调整结果如表7 所示.
分别使用方法一和方法二对两组数据进行调整,两组数据在n 次迭代后的误差如表8 所示.

表8 使用方法一和方法二对两组数据进行迭代的误差
从表8 可见,在对初始位置进行较大修改的情况下,方法一迭代2 次后的误差并没有增加,可见方法一具有较高的普适性,而方法二迭代2 次后的误差大幅增加,可见方法二适用范围较窄,稳定性较差.
5 总结
本文所用模型在依靠方向信息的情况下仍能得到较精确的结果,且调整模型的收敛速度较快.但模型的限制条件比较严苛,可以尝试将模型推广到更复杂的情况,例如,无人机群高度不一致等.亦可以尝试对模型进行调整,例如,调整无人机的选取方案、构造不一样的角偏差率函数、改变发射信号的无人机的数量等.
致谢:感谢汕头大学数学系李健老师的悉心指导.
