利用光学跟踪与结构光扫描相结合的高精度测量方法
2023-09-05黄高爽黄桂平
黄高爽,黄桂平,周 杨
(1. 信息工程大学,河南 郑州 450001; 2. 华北水利水电大学,河南 郑州 450046)
现代工业生产制造过程中,对工件的快速三维测量是较为重要的环节。目前高精度的工业测量方法有很多种,包括在被测物表面粘贴人工靶标,利用相机采集图像并计算靶标点三维坐标的工业摄影测量[1-2];基于球坐标系利用激光实时对反射器坐标进行跟踪的激光跟踪方法[3-4];基于前方交会原理,利用两台或多台经纬仪实现空间点定位的双(多)经纬仪测量方法[5-6];三轴向装有导向与测长机构,利用探针接触物体表面读取点三维坐标的三坐标测量方法[7-9]。上述方法均能达到较高的测量精度,但均需要接触被测物表面才能完成测量,对不能接触其表面的被测物(如镀膜反射面等)无法精确测量。因此将高亮光学靶标点代替反光靶标投射至物体表面的工业摄影测量方法被提出[10-11],即基于光学靶标的工业摄影测量方法。该测量方式虽然避免了与被测物表面的接触,但是所投射的点密度远远小于结构光扫描的点密度,无法表示被测物的细部结构。虽然结构光三维扫描方法[12-15]解决了点密度偏小的问题,但其工作范围较小,无法适应大尺寸工况下的测量。
基于上述问题,本文提出一种基于光学跟踪的结构光扫描方法。该方法利用双相机摄影测量系统作为光学跟踪器[16],在双相机视场范围内,实时跟踪测量结构光扫描仪的六自由度;同时利用结构光扫描仪实时扫描被测物表面的点云数据,并自动统一归化至光学跟踪器测量坐标下。因此既能实现对被测物的非接触测量,又能保证极高的点密度,对被测物的细部表现较好。另外在测量范围较大的情况下,可以在被测物旁粘贴人工标志点作为坐标系转换公共点,并配合单相机测量公共点三维坐标,利用这些公共点即可将不同光学跟踪器的测站坐标系进行统一,实现大尺寸非接触工况下的高点密度的测量。
1 光学跟踪器
光学跟踪器的主体由两个相机、碳纤维轴管、三脚架组成,如图1所示。其中相机为高速相机,可实现对结构光扫描仪的实时跟踪;碳纤维轴管连接两相机,保证在测量过程中相机之间的相对位姿不变。

图1 光学跟踪器的组成
光学跟踪器的有效跟踪范围如图2所示。测量纵深为1.5~4.2 m,高度方向上的测量范围为1422~3775 mm,宽度方向上的测量范围为923~3629 mm,总体有效测量空间体积为17.6 m3。因此单站测量完全可胜任中小尺寸的扫描测量。
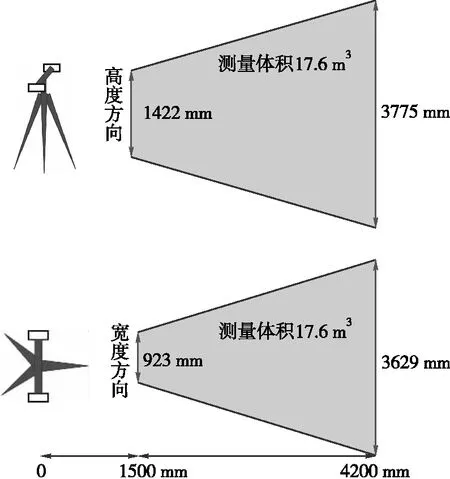
图2 光学跟踪器测量范围
光学跟踪器的原理为双相机摄影测量,是工业摄影测量中的一种重要测量模式。而工业摄影测量源于传统摄影测量学,与其有着相似的原理,多适用于近景范围内的精密工程测量。如图3所示,令左像片的像空间坐标系O-xyz为物方坐标系,右像片的像空间坐标系为O-xryrzr,左右像片的像平面坐标系分别为xlOlyl、xrOryr,焦距分别为fl、fr。令物方点P在物方坐标系中的坐标为(X,Y,Z),左右像片上与P点对应的点Pl、Pr在各自像空间坐标系对应的坐标分别为(x,y,-fl)、(x,y,-fr)。
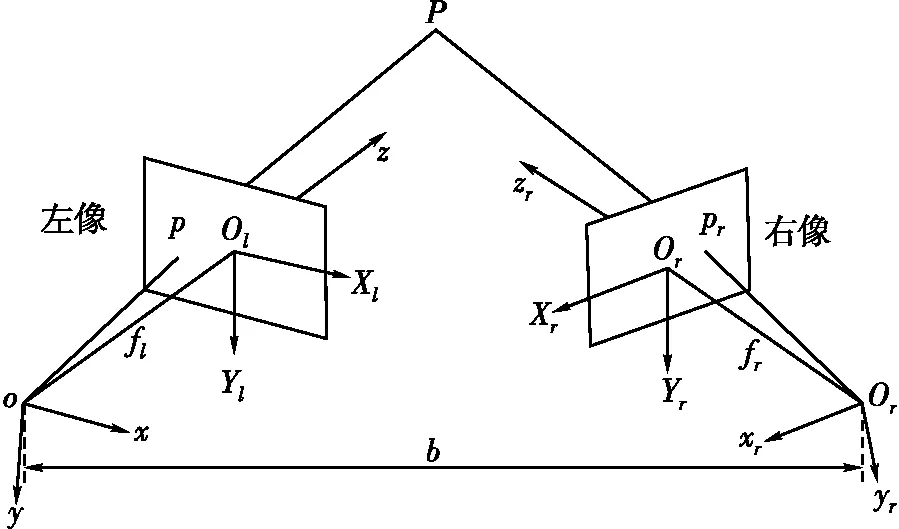
图3 双相机测量原理
由物点、像点、焦点3点共线条件可得出,对于左像片
(1)
令(X′、Y′、Z′)为物方点P在右像空间坐标系O-xryrzr中的坐标,对于右像片
(2)
(3)
将式(3)代入式(2)可得[17]

(4)
与典型的双相机摄影测量不同,光学跟踪器两相机的间距由稳定性很高的碳纤维轴管连接,相机轴距标定好后,两相机相对位置已经固定,因此旋转矩阵R、平移矩阵T及相机参数均为已知量,则只需扫描获取物方点对应的左右像片像点坐标,将式(4)代入式(1)即可得出对应的物方点三维坐标(X,Y,Z)。
2 结构光扫描仪
直接对被测物进行测量的是结构光扫描仪,由投射器、靶球、相机和碳纤维框架组成,如图4所示。其中靶球表面镶嵌有若干个反光标志点,因此可以使光学跟踪器实时扫描并计算反光标志点在光学跟踪器坐标系中的坐标。这种扫描仪的重量为1.5 kg,标称精度RMSE为0.030 mm,分辨率可达0.05 mm,测量速度为480 000次/s。

图4 带靶球的结构光扫描仪
扫描仪所用结构光为多线结构光,又称光栅结构光,为投射器发出的16条相交的红色激光线条,(如图5所示);通过不同位置的两个相机拍摄两张幅像,利用图像匹配算法寻找相匹配的像点,通过双目立体视觉原理可计算匹配像点的三维坐标。

图5 结构光正射示意
结构光扫描测量流程为:首先对相机进行标定,获得相机内参数、畸变参数及两相机坐标系之间的位姿关系;其次以两相机位姿关系为输入量,利用Bouguet算法[13]将汇聚式双目视觉矫正为前向平行式双目视觉,以便后续的激光条纹匹配;然后投射出的结构光线条分别在左相机成像,结合大津阈值分割算法和梯度中心法对图像进行扫描处理,获得单个像素相连的激光条纹;最后结合双目视差原理与外极线约束匹配算法[17-19],计算激光条纹在结构光扫描仪坐标系下的空间三维坐标。
3 光学跟踪器结合结构光扫描方法
通常在被测物尺寸较大的情况下,利用结构光扫描仪测量需要六自由度协作机器人辅助完成测量,即利用六自由度机器人对扫描仪进行路点示教。但是机器人的路点示教过程耗时较长、步骤烦琐,在测量过程中被测物、测量仪器的位置发生变动时,还需重新进行路点示教。因此利用光学跟踪器实时跟踪测量结构光扫描仪的六自由度以完成结构光扫描仪路点迁移,是较为快捷的方式。本文分别介绍利用光学跟踪器结合结构光扫描仪的单站测量及基于控制场的的多站测量两种测量形式。
3.1 光学跟踪器结合结构光扫描仪的单站测量
设以被测物为中心建立的坐标系为A、以光学跟踪器为中心建立的坐标系为B、以结构光扫描仪为中心建立的坐标系为C。测量的最终目的是将所有扫描的点云数据转换至物方坐标系A下。
设结构光扫描仪上不在同一条直线的I≥4个靶标点被光学跟踪器识别,则靶点在坐标系B中的坐标矩阵为[XbYbZb]T,在C中的坐标矩阵为[XcYcZc]T,并设坐标系B与C的旋转矩阵为Rbc,平移矩阵为Tbc,则有
(5)
若在测量过程中单站的光学跟踪器可以完成测量,则坐标系A与B重合。设结构光扫描仪所扫描出的三维点云坐标为(Xc,Yc,Zc),转换到坐标系B后的坐标为(Xb,Yb,Zb),同样为坐标系A中的坐标(X,Y,Z),则
(6)
3.2 基于控制场的多站扫描测量
若被测物尺寸过大,需要移动光学跟踪器,即在被测物周边布设控制场(公共点)将多个测站所测点云统一归化至同一坐标系A。公共点由单相机工业摄影测量系统标定解算,则A为单相机摄影测量坐标系。设公共点在坐标系A的坐标为(Xa,Ya,Za),其中一个测站在坐标系B的坐标为(Xb,Yb,Zb),并设坐标系A与B的旋转矩阵为Rab,平移矩阵为Tab,则有
(7)
因此由已知量可得最终点云三维坐标(X,Y,Z)为
(8)
在利用该方法实施测量的过程中,仪器无需接触被测物及其平面,同时不在被测表面粘贴任何靶标工装类辅助工具,通过光学跟踪系统对结构光扫描仪的实时跟踪,结构光扫描仪对被测表面实时扫描,通过求得转换矩阵可将点云数据实时转换至统一坐标系,从而完成整个非接触测量。
4 精度验证试验
为验证该方法的可行性与精度,对大口径镀膜反射面进行测量。被测物体是直径为3100 mm、高为734.43 mm的标准抛物面反射面,如图6所示。单站结构光扫描测量不能保证较高的精度,因此需要多个跟踪器的测站进行测量。在反射面四周布设控制场,利用控制场统一每站光学跟踪器所测点云数据的坐标系,最后将数据与反射面数学模型进行对比,得出RMSE。

图6 被测反射面示意
4.1 试验过程
首先将反射面开口向上平放至地面,在反射面四周布设控制场(如图7所示),利用单相机工业摄影测量系统测量控制场的精确三维坐标;然后将光学跟踪器架设至摄站1,利用控制场标定坐标系B与A之间的位姿关系,并利用结构光扫描仪在跟踪器有效测量范围内对反射面进行测量。

图7 现场布设
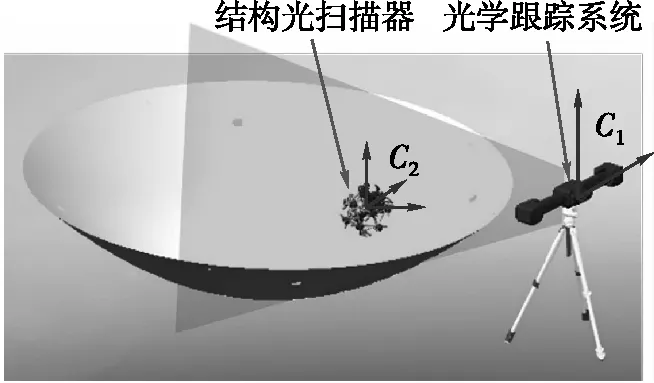
图8 现场扫描测量示意
按照上述单站测量方案依次在图7中摄站2、3、4对反射器进行测量,最终得出完整的反射面点云坐标。由于点云密度较大,需要先将密度稀释到合适值,再与型面数学模型分析对比,得出该系统的型面测量精度。
4.2 试验结果
反射面分为两个区域:内部区域是半径为1500 mm的抛物面,型面精度要求最佳拟合RMSE小于0.100 mm;外部区域是半径为1500~3100 mm的圆环抛物面,精度要求最佳拟合RMSE小于0.150 mm。综上所述,分别以整体、内部、外部点云数据与反射面的数学模型进行最佳拟合。拟合偏差如图9所示,拟合数据见表1。
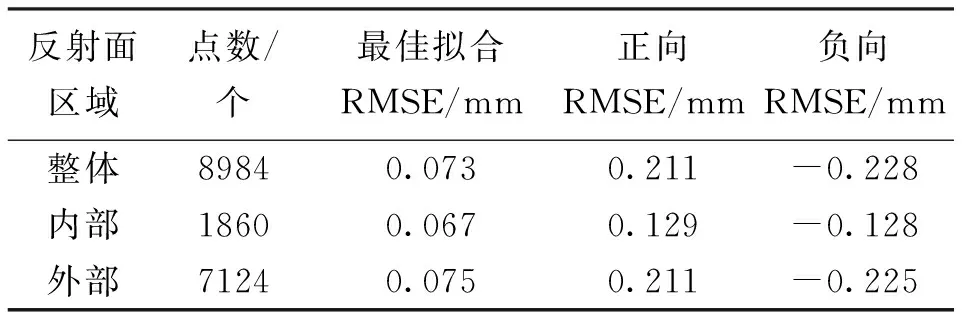
表1 反射面各部分型面拟合数据

图9 拟合偏差趋势
4.3 结 论
由图9可知,整体与内部、外部两区域的拟合偏差趋势相同,反射面靠近中心的位置相对于数学模型向下变形,反射面边缘部分区域相对于数学模型向上变形。表1中整体反射面区域的最佳拟合RMSE为0.073 mm,小于限差0.1 mm;内部区域与外部区域最佳拟合RMSE分别为0.067、0.075 mm,分别小于0.100、0.150 mm的精度要求。
由各部分的最佳拟合RMSE可以看出,测量精度超出RMSE 0.030 mm的标称精度,总结原因为:①被测物尺寸过大,对其进行了多测站的测量,因此在各测站点坐标系统一时会损失一定精度;②被测物的制造精度不高,实际的型面精度相对于数学模型有较大变形,造成各部分反射面型面最佳拟合RMS偏大。但该方法的优势在于测量范围大、点密度高、非接触等,同时测量精度满足大部分工业制造要求。
5 结 语
本文对光学跟踪器与结构光扫描仪的构造及测量原理进行了介绍,并针对现有测量方法存在的问题,提出了光学跟踪器与结构光扫描仪相结合的测量方法,并通过试验对该方法进行了精度测试。结果表明,该方法具有较高的精度与可靠性。该方法不接触被测型面即可快速、高精度地测量型面点云数据的特性,拓展了可测量范围,提高了测量效率,同时为工业制造、产品检测、逆向工程等领域的应用提供了参考。