光伏跟踪器阵列跟踪精度的测算方法研究
2022-03-29孙长江翁凯雷王士涛李彩霞
孙长江,翁凯雷,李 瑞,王士涛,李彩霞
(1.中国电建集团华东勘测设计研究院有限公司,杭州 311122;2. 江苏中信博新能源科技股份有限公司,昆山 215331)
0 引言
光伏跟踪器技术是通过支架转动带动光伏组件正面始终朝向太阳,以最大化利用太阳辐照资源。常用的判断光伏跟踪运行可靠性的方法为:光伏可通过专用的测量装置获得光伏跟踪器的实际跟踪角度位置,并与跟踪控制算法的目标跟踪角度位置比较,通过两者的差值判断光伏跟踪器是否在规定的角度偏差范围内。通常,光伏跟踪器设计的跟踪角度差值不超过2°。但该方法仅从角度数据、机械结构方面对单个光伏跟踪器的单一时刻的瞬时状态进行判定,缺乏对光伏跟踪器及光伏跟踪器阵列长期运行状态的判定依据[1]。
本文通过对平单轴光伏跟踪器进行跟踪角度和精度分析,提出基于辐照差异性的光伏跟踪器阵列跟踪精度测算方法,通过持续测量获取单个及阵列级别的精度数值,用于评估光伏跟踪器或光伏跟踪器阵列的运行可靠性,对不满足跟踪精度要求的光伏跟踪器及时进行角度校正。
1 太阳运行轨迹
光伏跟踪器技术的实质是对太阳位置进行追踪,太阳运行轨迹可由天文算法获得。以北半球正午前某时刻的太阳位置为例,太阳相对于地球某一地面观测点的位置,通常用太阳高度角α(地面观测点和太阳光入射方向同地平面之间的夹角)和太阳方位角γ(从某方向沿着地平线顺时针或者逆时针度量的角度)来定义,具体如图1所示。
天文算法用于计算太阳高度角、太阳方位角、太阳赤纬角等太阳位置相关值,但算法精度较低,实际光伏跟踪器的跟踪控制算法会修正相关参数,包括年度校正、经度校正、时刻校正等,以获得高精度的太阳高度角、太阳方位角参数[2]。修正前的天文算法的计算式为:
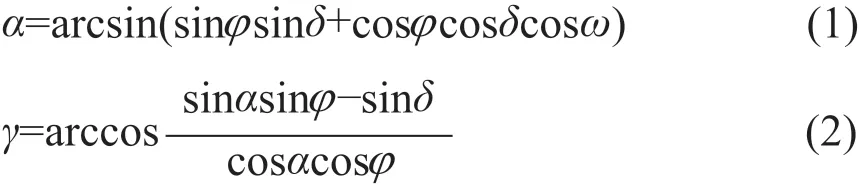
式中:φ为纬度;δ为太阳赤纬角;ω为太阳时角。
式中:n为365天中的日子数(例如,1月1日为n=1,2月1日为n=32);Ts为日出到日落的时长;θ为日出后的时长。
根据天文算法计算式(1)~(5)可计算出山东省威海市全年的太阳高度角和太阳方位角,并绘制山东省威海市典型日(春分、夏至、秋分、冬至)的太阳运行轨迹图,具体如图2所示。

图2 山东省威海市典型日的太阳运行轨迹图Fig. 2 Solar trajectory map of typical days in Weihai,Shandong Province
从图2中可以看出:
1)山东省威海市全年太阳运行轨迹曲线均分布于夏至日和冬至日曲线内。
2)图2为典型的南北回归线以外的纬度地区(山东省威海市的地理位置为37.5°N)的太阳运行轨迹图。每日的太阳高度角最大值出现在正午,全年的太阳高度角最大值出现在夏至日正午;太阳方位角最大值出现在夏至日的日出和日落时刻。夏至日的日照时间最长,冬至日的日照时间最短,夏至日中午时段太阳角度的变化最快[3]。
2 光伏跟踪器跟踪角度的运行轨迹
根据式(1)~式(5)可计算出太阳运行轨迹,光伏跟踪器追踪该轨迹转动,从而可计算得到始终保持光伏组件正面接收的太阳辐照最大时的跟踪角度。光伏跟踪器首先计算太阳实时角度和光伏跟踪器目标跟踪角度,然后驱动支架达到目标跟踪角度位置,完成初步跟踪。实际项目中,聚光光伏发电项目的双轴光伏跟踪器会配备直射辐照测量装置,非聚光光伏发电项目的双轴或单轴光伏跟踪器会配备角度位置传感装置,形成闭环控制跟踪角度的进一步精调,使光伏组件达到最佳跟踪角度位置,从而使光伏发电系统的发电量达到最大[4]。
通常使光伏组件尽量朝向太阳即为光伏跟踪器的最佳跟踪角度,在实际应用中,光伏跟踪器的跟踪角度会受到其结构设计最大角度的限制,同时其跟踪控制算法需考虑光伏阵列阴影遮挡问题。光伏跟踪器计算的目标跟踪角度如果超出结构设计最大角度,光伏跟踪器将停在结构设计最大角度位置;在早晚太阳高度角较低时,光伏跟踪器阵列的排间会有内部阴影,为避免光伏阵列内部阴影,光伏跟踪器会采用反向跟踪策略,避免阴影遮挡。因此在上述特殊时间段,光伏跟踪器为了最大化光伏发电系统的发电量,不会定位在最佳跟踪角度位置。
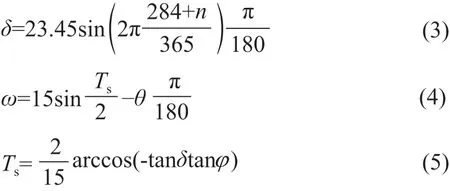
设定结构设计最大角度为±60°,,则光伏跟踪器在典型日( 春分、夏至、秋分、冬至)全天的跟踪角度曲线如图3所示。
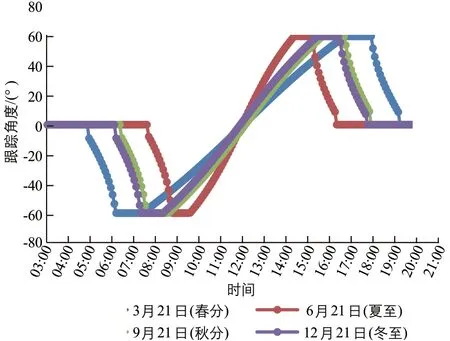
图3 典型日的光伏跟踪器全天的跟踪角度Fig. 3 Tracking angle of PV tracker in typical day
从图3中可以看出,光伏跟踪器在4个典型日的跟踪角度曲线规律相同。其中,由于夏至日日照时间最长,跟踪阶段时间最长(不包括原向跟踪阶段);冬至日日照时间最短(不包括原向跟踪阶段),跟踪阶段时间最短。光伏跟踪器依据目标跟踪角度运行,驱动支架系统达到目标跟踪角度位置,然后通过传感器反馈实际跟踪角度位置,使实际跟踪角度和目标跟踪角度始终保持在一定差值范围内。对于晶体硅光伏组件而言,考虑光线入射角度的光伏组件余弦损失特性,光伏跟踪器的跟踪角度偏差不超过2°即可[5]。
光伏跟踪器的跟踪角度转动规则如图4所示。日出后,光伏跟踪器进入反向跟踪阶段,从水平0°运行至朝东结构设计最大角度-60°,停转一定时间t1,进入追踪太阳运行轨迹的跟踪阶段,跟踪角度将从朝东最大-60°运行至朝西结构设计最大角度60°,停转一定时间t2后,光伏阵列内部即将出现阴影,为避免阴影遮挡,光伏跟踪器进入反向跟踪阶段,跟踪角度从60°逐渐运行至水平0°,直至日落结束跟踪。
图4 光伏跟踪器的跟踪角度的转动规则Fig. 4 Rotation rule of tracking angle of PV tracker
3 精度测算方法
精度的测量,可采用角度水平尺测量光伏跟踪器的实际跟踪角度与目标跟踪角度的差值,即跟踪角度偏差。本文根据安装光伏跟踪器的光伏阵列的特点,提出一种可对跟踪精度长期、持续测量的方法,即通过测量光伏跟踪器阵列内的全部光伏组件正面接收的太阳辐照值,实时计算整个光伏阵列中光伏跟踪器的平均跟踪角度偏差,得到所有光伏跟踪器的平均跟踪精度。
根据设计的光伏阵列容量不同,光伏阵列内部的光伏跟踪器数量不等。以平单轴光伏跟踪器为例,1个光伏阵列中的光伏跟踪器数量通常不超过100台。选取一定数量的光伏跟踪器,并在所选的光伏组件正面安装太阳辐照测量装置,如图5所示。由于早晚太阳高度角小,光伏阵列内部易发生阴影遮挡,或光伏跟踪器为避免阴影遮挡而进行反向跟踪,因此选择的测量时间应避开反向跟踪时间。参考GB 50797-2012《光伏发电站设计规范》的要求,当地真太阳时每天9:00~15:00光伏阵列之间无阴影遮挡,因此本测算方法优选当地真太阳时的11:00~13:00。由于光伏阵列占地面积大,不同位置的环境条件存在差异,低太阳辐照天气时,以散射太阳辐照为主,环境差异会直接造成散射太阳辐照差异,因此应筛选出高太阳辐照数据,优选太阳辐照超过500 W/m2的数据作为有效数据。
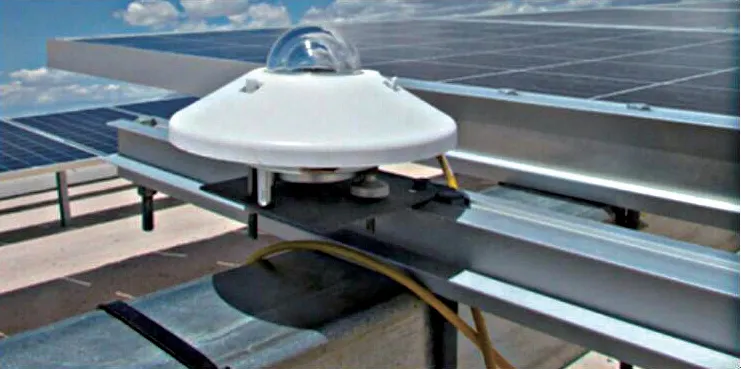
图5 光伏组件正面的太阳辐照度测量Fig. 5 Solar irradiance measurement on front of PV modules
以一定时间间隔得到n组测试数据(例如,每5 min间隔收集1组数据,11:00~13:00可得到24组数据),每组内包括m个光伏跟踪器,即有m个太阳辐照度数据,共计可得到m×n个太阳辐照度数据,得到该时间段内所有光伏阵列内的光伏组件正面接收的太阳辐射强度,具体如下所示:
第n组:In-1、…、In-j、…、In-m。
设置一组基准组,获取最大太阳辐照度基准值Ii-max,通过平均偏差公式得到第i组光伏跟踪器的跟踪精度δi,其计算式为:

式中:Ii-max为每组m个测得的太阳辐照度数据中的最大值。
根据式(6)~式(7),对所有n组测数据的跟踪精度求平均值,可得到光伏阵列的平均跟踪精度δ,其计算式为:

根据式(8)可知,时间间隔越小,测试数据的组数越多,计算得到的光伏阵列平均跟踪精度越高。
4 建模分析
以山东省威海市为例进行光伏发电系统建模仿真,用PVsyst仿真软件建立多角度模型,建模参数设置为37.5°N、122.1°E,海拔23 m,导入从Meteonorm气象软件得到的气象数据,分别模拟光伏跟踪器跟踪角度偏差为2°、4°、6°、8°、10°时的太阳辐照度偏差值,并提取超过500 W/m2的仿真数值,具体如图6所示。
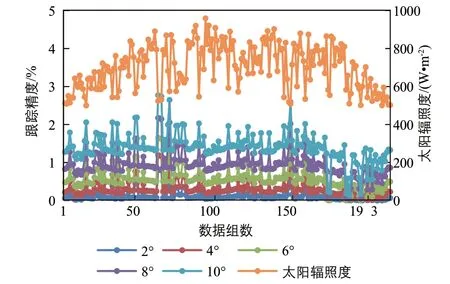
图6 建模得到193组数据的跟踪精度Fig. 6 Tracking accuracy of 193 groups of data obtained by modeling
从图6可以看出,跟踪角度偏差越小,光伏跟踪器的跟踪精度越高。
对全部跟踪精度的偏差数值按照太阳辐照度高低整理,如图7所示。光伏跟踪器的跟踪精度的数据规律为:在低太阳辐照度时跟踪角度偏差较大,数据呈现分散状,高太阳辐照度时跟踪角度偏差较小,数据呈现集中状;即太阳辐照度低会影响测量精度,因此本测量方法应当选取高太阳辐照度的情况下的跟踪精度数据。
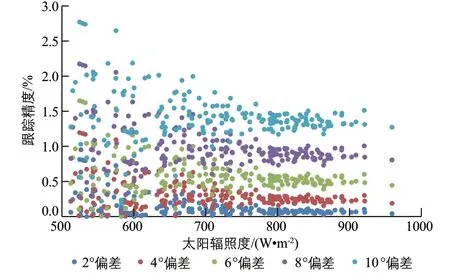
图7 不同跟踪角度偏差及太阳辐照度下跟踪精度的数据分布Fig. 7 Data distribution of tracking accuracy under different tracking angle deviation and solar irradiance
对筛选出的太阳辐照度超过500 W/m2的193组数据按照太阳辐照度500、600、700、800、900 W/m2划分等级,超过600 W/m2的有149组件数据,超过700 W/m2的有105组数据,超过800 W/m2的有51组数据,超过900 W/m2能有5组数据,计算每个等级的平均跟踪精度,从而得出光伏跟踪器阵列的平均跟踪精度,如图8所示。从图8可以看出,太阳辐照度等级越小,光伏跟踪器阵列的跟踪精度越低。
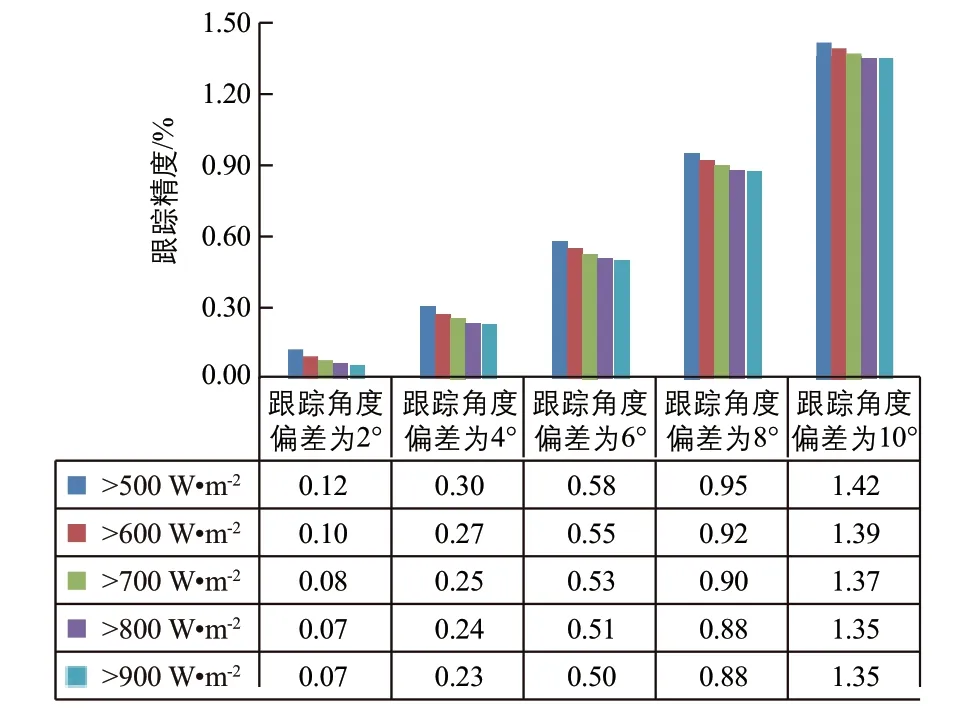
图8 光伏跟踪器阵列的平均跟踪精度Fig. 8 Average tracking accuracy of PV trackerarray
通过上述测算方法和建模结果,可得到光伏跟踪器阵列的平均跟踪精度值,跟踪角度偏差越高,跟踪精度越高,且太阳辐照度越高,测算结果准确性也越高。针对平均跟踪精度建模数据分析,以下可作为对光伏跟踪器阵列进行跟踪角度修正的判断依据:
1)δ约为0.1%时,表示光伏跟踪器阵列的跟踪角度偏差在2°左右,基本满足跟踪精度要求;
2)δ约为0.3%时,表示光伏跟踪器阵列的跟踪角度偏差在4°左右,应对光伏跟踪器阵列进行跟踪角度修正;
3)δ>0.5%时,表示光伏跟踪器阵列的跟踪角度偏差超过6°,应尽快对光伏跟踪器阵列进行跟踪角度修正;
4)δ约为1.5%时,表示光伏跟踪器阵列的跟踪角度偏差可能超过10°,易使发电量产生严重偏差,应立即对光伏跟踪器阵列进行跟踪角度修正。
实际项目中的精度测算可通过角度测量工具辅助测量光伏跟踪器的实际跟踪角度,同光伏跟踪器目标跟踪角度进行对比,修正跟踪角度偏差,使目标光伏角度和实际跟踪角度一致,保障光伏跟踪器的运行可靠性。
5 结论
本文提出了光伏跟踪器跟踪精度的测算方法,通过在光伏跟踪器阵列中增加太阳辐照监测装置长期自动采集实时太阳辐照度,根据有效时间段、高太阳辐照度条件筛选有效数据,计算光伏跟踪器阵列的跟踪角度偏差,最终得到光伏跟踪器的平均跟踪精度,判断光伏跟踪器是否在规定的跟踪角度偏差范围内,以此评估光伏跟踪器的运行可靠性,对不满足精度要求的光伏跟踪器及时校正,保障光伏跟踪器的运行可靠性和跟踪精度。
