多类型机器人在物流系统中的应用
2023-09-03陈琳杨晓帆贺峪原
陈琳 杨晓帆 贺峪原

摘要:随着物流系统复杂性的不断增加,多类型机器人在物流系统中的协作应用必将成为现代物流系统的发展趋势。对于以仓储为主要作业的物流系统,库前区承担着货物收发、拆码、空托盘码分等任务,该区域设计的优劣直接影响整个系统的运行效率。本文以苏州烟草配送中心立体仓库库前区设计为例,探讨多类型机器人协同作业在物流系统中的应用。
关键词:物流中心;多类型机器人;立体仓库
引言
在现代全球经济形势下,物流在中国产业发展和国民经济中扮演着非常重要的角色。根据工业生产数据统计,产品的生产加工过程中,约有90%左右的时间花费在物流过程中,约10%的产品生产成本花费在物流成本中。通过降低物流成本,企业可以提高利润。与欧美老牌企业相比,我国的物流主要依靠增加硬件设备和操作人员的数量来满足企业物流需求的增长。为了我国物流产业的可持续发展,政府发布了一系列政策,重点带动物流企业的发展。
发达国家已经投入使用有50年之久,无论在物流理论还是物流产业规模均已成为中坚力量。我国在物流业起步较晚,在20世纪90年代以后,中国经济的快速发展推动了物流业的快速发展。目前,国内外物流领域的学者和企业进行了深入的研究。Luzenira通过遗传算法嵌入统计模块,设计出可实时获取物流信息的物流配送操作系统。Rui F U等通过数据模拟,建立以仓库为中心的路径优化模型。Banu.Y.Ekren通过穿梭式储存和检索系统对自动化立体库进行设计,克服了由于电商增加而导致的问题,具有更高的处理订单效率。李星圆和李永强在库存管理方面提出了二次ABC分类法和EOQ模型相结合的方法对商品进行了精细化的管理,解决的订货多少的问题,有效地控制了库存。初怡利用Flexsim进行仿真作业流程,改变设施数量以及人员,通过实验对效率进行了优化。彭弢等人通过系统思考方法分析订单数据、仓储作业任务等确定优化方案,提升了物流配送中心的效率。余文泰和张得志通过构建基于智能制造的带时间窗约束的生产物料配送路径优化模型,解决了生产车间物料即时配送,提升物流配送效率,降低物流成本。王伯楠使用模糊c-均值聚类算法和自适应遗传-模糊均值聚类算法分别对基于任务均衡的分拣聚类模型进行优化,再利用自适应遗传-模糊均值聚类算法应用于订单分批分拣优化模型,通过两次聚类过程有效实现了卷烟配送中心分拣线任务均分,优化了堆垛机出入库过程,提升了配送效率。
物流配送中心具有配送响应速度更快、全流程更智能化、调度系统更完善、存储系统更细化、支持定制化要求等特点。随着全球化和市场化的推进,越来越多的大型企业为了提高效率,降低人工成本,选择建设物流配送中心。本文以苏州烟草配送中心立体仓库库前区设计为例,来探讨多类型机器人协同作业在物流系统中的应用。
一、立体仓库库前区需求及流程分析
(一)库前区流量需求分析
由于中国经济的不断增长,消费者需求、产品需求、经济模式、产品制造方式都在发生变化,这些变化对物流行业的要求越来越高。我国于1980年建成了第一个自动化立体仓库,比传统货架具有更好的空间利用率和運行效率。物流系统越来越多地在食品、化纤、医疗等行业得到广泛应用。随着企业规模的扩大和客户需求的增加,传统的自动化仓库已经不能满足大型企业的需求。大型企业会选择建设功能更完备、效率更高、性能更高的物流配送中心。以苏州烟草配送中心为例,苏州烟草配送中心设计年配送量约107万大箱,为“一类卷烟物流配送中心”。入库流量为最大月平均收货40879件/日,其中散件到货量占总到货量的45.03%,即18408件/日;整托盘件烟到货量占总到货量的54.97%,即22471件/日。每日工作时长8.5小时,则散件件烟入库量需达到2166件/时,即73托/时;整托盘件烟入库量需达到2644件/时,即88托/时。出库流量为商业烟草是拉动式补货模式,平均出库39015件/日,每日工作时长8.5小时,平均每日每小时出库4590件/时,即153托盘/时。
(二)库前区流程分析
苏州烟草配送中心每日收货包括两类,散件收货和整托盘收货。散件到货后,伸缩链板输送机直接伸入货车车厢内部,卸下散件货物,经入库扫码识别信息后送至多关节码垛机器人处进行码盘,码盘后由顶升式搬运机器人搬运至立体仓库入口。整托盘到货卸车后,直接由顶升式搬运机器人搬运至立体仓库入口。出库是由顶升式搬运机器人将高架库出库口的整托盘卷烟搬运至多关节拆垛机器人或人工工位处进行拆垛作业,拆垛后的件烟经出库扫码识别信息后送至储分一体区暂存,库前区工艺流程图1。
二、多类型机器人协同作业设计
(一)多类型机器人协同作业效率
1、拆码垛机器人作业效率
拆码垛机器人可以处理不同品规、不同规格的件烟,以标准烟(2-3码)、异型烟(1-1码)拆码方式为例计算拆码垛机器人作业效率。标准烟、异型烟拆码垛方式如图2和3所示。
拆码垛机器人效率值为11s/循环,再根据上图标准烟和异型烟的拆码垛方式,得出拆码垛机器人的拆码标准烟和异型烟的效率,如表1所示。
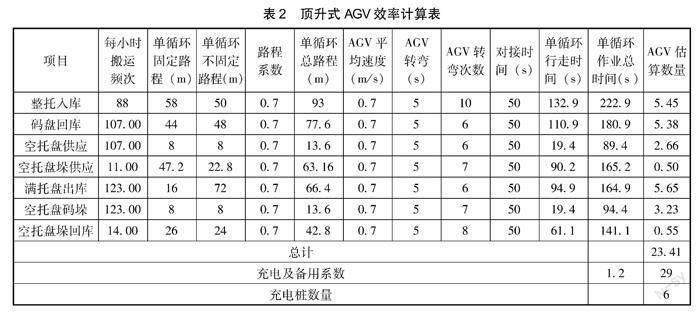
2、顶升式搬运机器人作业效率
顶升式AGV执行功能主要包括整托入库、码盘回库、空托盘垛补给、空托盘补给、满托盘出库、空托盘码垛、空托盘垛回库。顶升式AGV效率表如表2所示。
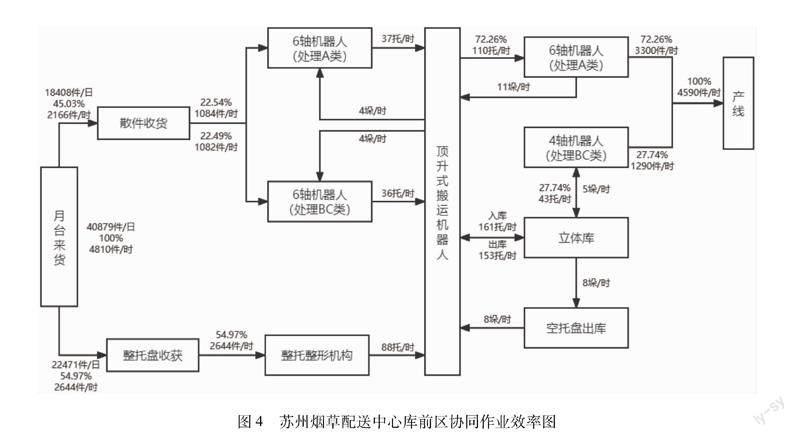
3、多类型机器人协同作业效率
苏州烟草配送中心入库采取推动式模式,出库采取拉动式模式,再根据上述拆码垛机器人效率和顶升搬运机器人效率,得出苏州烟草配送中心多类型机器人库前区整体协同作业效率,如图4所示。从图中看出,拆码垛机器人和顶升式搬运机器人在拆码垛环节和搬运环节效率相互匹配,保证苏州烟草配送中心整个库前区系统的流畅运行。
(二)多类型机器人库前区控制系统
1、拆码垛机器人及控制系统
拆码垛机器人采用六轴结构设计,通过各轴配合实现自动拆码垛作业。拆码垛机器人配有烟草特殊定制设计的多功能夹具,夹具由机架、真空吸盘、真空开关、真空电磁阀及气路系统等组成,可以牢固吸取不同尺寸和不同重量的烟箱,且每个拆码垛机器人都有独立的机器人控制系统,可以堆码不同垛型的件烟。
机器人控制主要通过各轴配合将夹具运行至件烟定位的正上方,当件烟定位信号发出时,夹具通过伺服电机控制向下运动,当达到夹具夹持件烟高度时,停止下降,末端夹具开启,夹起件烟,伺服电机反转,将夹具升到安全高度后,通过预设程序将件烟送至拆码垛位上方,夹具打开,将件烟放入指定位置。
机器人控制硬件主要有伺服电机、驱动器、控制器。控制软件主要采用BaseWare5.0机器人操作系统,RAPID高级编程语言,VxWorks和Net-FrameWork协议,设备通信接口支持各种总线标准。控制串口通信:1×RS232/RS422。软件通信接口支持Ethernet,RemoteI/O标准。
机器人安全性能主要有紧急停止,自动模式停止,测试模式停止等。安全措施主要分为主动安全措施和被动安全措施。主动安全措施有碰撞力检测功能、电子稳定路径功能、主动制动系统。被动安全措施有负载识别、活动机械挡块限制、双保险限位开关。
2、顶升式搬运机器人及控制系统
顶升式搬运机器人是一种自动引导车,又称顶升式AGV,是一种智能化、柔性化的搬运设备,其特点是无人驾驶。顶升式AGV上装备有自动导向系统,可以保障机器人在不需要人工引航的情况下就能够沿预定的路线自动行驶,将货物自动从起始点运送到目的地。顶升式AGV一般配备有装卸机构,可以与其他物流设备自动接口,实现货物和物料装卸与搬运全过程自动化。
顶升式AGV小车控制系统主要包括导航技术、伺服驱动技术、传感器技术等。导航技术利用视觉传感器和惯性传感器实现载体对周围环境感知的无源导航自定位。伺服驱动技术采用电机+伺服驱动系统,双转向驱动控制,双轮差速驱动,支持前进、后退、旋转等运动控制,运动过程平滑柔顺。传感器技术采用红外或激光避障检测方式。AGV小车具备机械防撞装置、激光检测防护;具备急停、非接触防护、机械防护等安全防护功能,且有负重过载保护功能。
(三)多类型机器人库前区信息调度系统
库前区入库信息调度系统:当上位机下发入库指令后,件烟传输线将到货的件烟传输到码垛机器人或人工码垛口进行码垛,码垛后的烟根据品牌信息被上位机分配货位,再通过托盘传输线传输到AGV取货位置,AGV接收到上层系统下达搬运任务的指令,RCS系统将搬运任务的路线分解为起点坐标和终点坐标信息,利用A*算法计算求得到目标地的最小路径,再综合考虑AGV距离、电量、任务执行情况以及下发任务的优先级进行派发任务,小车确定任务后把件烟搬运到对应的堆垛机巷道托盘输送线,托盘输送线把盘烟输送到堆垛机巷道入口进行入库。
库前区出库信息调度系统:根据件烟备货系统的缺货信息和其他要求信息,上位机发出出库指令后,堆垛机把盘烟从对应的货位上取出,运输到堆垛机巷道出口的托盘传输线上,托盘输送线系统根据上位机指令,把盘烟传输到AGV取货位置,通过调度AGV运送到拆垛机器人和人工拆垛口处进行拆垛,最后再进入件烟备货系统的入库传输线。
三、结论
随着科技的发展,物流配送中心被运用在各行各业中。物流配送中心结合了运输、仓储、装卸、加工、整理、配送、信息等方面,将运输合理化、仓储自动化、包装标准化、装卸机械化、加工配送一体化、信息管理网络化,形成了多功能、一体化供应链。本文基于多类型机器人的特点,对多类型机器人在商业烟草物流领域的协同作业做了实践研究,发现多类型机器人协同作业在商业烟草库前区物流系统中具备一定的应用可行性。但是其中很多设备,仍能对其系统效率进行优化,比如AGV系统,拆叠盘机系统等,从而使整个系统的效率得到更大地提升。
参考文献
[1]Luzenira, Alves, Brasileiro. Simulation of the Optimal Location for a Distribution Center of E-Commerce Operations in S?o Paulo State[J]. IEEE Latin America Transactions,2018.
[2]Banu Y. Ekren. A simulation-based experimental design for SBS/RS warehouse design by considering energy related performance metrics[J]. Simulation Modelling Practice and Theory,2020,98.
[3]李星圆,张永强.基于EOQ模型的配送中心物流优化研究[J].物流工程与管理,2020,42(10):84-86.
[4]初怡.基于Flexsim的企业配送中心作业流程优化[J].中国物流与采购,2020(18):64-67.
[5]彭弢,姚正亚,李全梁,黃建平,王云飞.卷烟物流配送中心仓储出库作业效率优化的研究与应用[J].物流技术与应用,2020,25(08):129-131.
[6]余文泰,张得志.基于智能制造的生产车间物流配送优化[J].物流工程与管理,2020,42(06):6-11.
[7]朱岩,闻琦,陈传军,韩亮.机器人拆垛工作站效率分析[J].制造业自动化,2022,44(09):129-133.
[8]娄世起,熊旭,叶潘,林子安,闫泽萍,王桂英.码垛机器人在包装行业的应用前景探讨[J].中国包装,2022,42(07):22-26.
[9]李永梅,刘金刚,马镒明.码垛机器人控制系统研究[J].工业控制计算机,2021,34(11):58-60.
[10]黄文镇.机器人在卷烟工业企业成品生产物流中的应用[J].造纸装备及材料,2021,50(06):46-48.
[11]孙明伟,卢会超,汤颖佳,葛振中,储汝涛,李季.某大型医药配送中心自动化立体仓库系统的规划与设计[J].物流技术与应用,2020,25(10):161-167.
[12]吴瑜.自动化拆垛系统在物流仓储中的应用[J].现代制造技术与装备,2020(06):186+188.
[13]兑幸福.拆码垛机器人负压夹具密封方式改造与优化[J].内燃机与配件,2020(06):167-168.
Application of multi-type robot in logistics system
Chen Lin1, Yang Xiaofan2, HE Yuyuan1
(1. Potevio Logistics Technologgy Co., Ltd., Beijing 100080: 2. School of Economics & Management, Beijing Information Science and Technology University, Beijing, 100192)
Abstract: With the increasing complexity of logistics system, the cooperative application of multi-type robots in logistics system will become the development trend of modern logistics system. For the logistics system with warehousing as its main operation, the warehouse front area undertakes the tasks of receiving and sending goods, uncoding and dividing empty pallet codes. The design of this area directly affects the operation efficiency of the whole system. Taking the design of the warehouse front area of Suzhou Tobacco Distribution Center as an example, this paper discusses the application of multi-type robot collaborative operation in the logistics system.
Keywords: logistics center, multi-type robot, Three-dimensional warehouse
作者簡介:
陈琳(1984-),女,辽宁省本溪市,硕士,高级工程师。主要从事物流系统自动化、信息化等研究和应用工作。
杨晓帆(1997-),女, 2021级工业工程与管理专业硕士研究生。
贺峪原(1995-),男,甘肃省庆阳市,硕士,助理工程师。主要从事物流系统规划设计、数据分析等研究、应用工作。
