基于随机森林的电机异音故障诊断方法
2023-08-26钟张豪丑永新侯千红
钟张豪,丑永新 ,侯千红
(1.盐城工学院 机械工程学院,江苏 盐城 224051;2.常熟理工学院 电气与自动化工程学院,江苏 苏州 215000)
电机是现代生产和生活中十分重要的机电设备,其工作状态好坏直接影响整个系统的稳定性。由于电机转子不平衡、轴承磨损等产生的异常震动会在电机外部产生“滴滴答答”等的异音,研究表明80%以上的电机故障都会产生异音[1-3],因此可将异音判别作为电机故障诊断的重要依据。
目前,我国电机出厂故障检测主要依靠人工在静音房听音,这种方式耗时耗力且容易出现误判。因此,实现电机异音故障的智能检测十分重要。
到目前为止,国内外已经有了电机异音诊断方法的研究,这些方法主要从信号的频谱分析、时频分析、机器学习建模3个方面展开。
在频谱分析方面,通过傅里叶变换得到电机音频信号的频谱图,再根据各种故障下的故障特征频率信息对异音信号进行分辨[4]。由于电机振动信号属于非平稳信号,使用一般的频谱分析法如傅里叶变换等的效果欠佳,并且傅里叶变换只能进行整段信号的频谱分析,不能对异音发生的时刻进行定位。因此,时频分析方法如短时傅里叶变换、小波变换和经验模态分解等被引入电机异音的检测中。
短时傅里叶变换虽然拥有一定的时间分辨率,但窗口一旦选定,则不能再变化,不具有自动调节的功能[5];小波变换作为一种新的时频分析方法,继承和发展了短时傅里叶变换局部化的思想,同时克服了窗口大小不随频率变化等的缺点,很适合运用在非平稳信号中[6-7];经验模态分解将振动信号进行自适应分解后,提取方差贡献率高的分量重构新的信号,可以有效去除噪声以及不包含故障信息的频带,在电机异音故障诊断方面效果很好[8],但是传统的经验模态分解容易产生模态混叠和虚假分量,影响最终结果。
随着机器学习分析技术的发展,电机异音故障诊断问题迎来新的解决方法。反向传播(back propagation,BP)神经网络算法通过自身训练学习规则,对电机异音识别的准确率可以达到90%[9],但是BP神经网络也拥有学习速度慢,容易陷入局部极小值等缺点。支持向量机是一类按监督学习方法对数据进行二元分类的广义线性分类器,使用支持向量机对电机异音信号进行识别得到了电磁异音91.76%、轴承异音100%、摩擦异音99.24%以及松动异音98.75%的识别结果[10],但是支持向量机对线性分类问题具有较高识别率,对非线性分类问题的识别率较低。卷积神经网络(convolutional neural networks, CNN)是一类包含卷积计算、具有深度结构的前馈神经网络,是深度学习的代表算法之一,其代表特点是局部连接、权值共享以及时间或空间的下采样。将卷积神经网络与迁移学习结合后对电机轴承故障进行诊断,准确率达到99.8%[11]。卷积神经网络优点是不需要进行特征提取,缺点是需要大量样本进行训练,培训成本高、花费时间长,而实际生产中产出的次品数量很少,难以满足卷积神经网络需要的大量样本的要求。
与BP、CNN等机器学习方法相比,随机森林(random forest, RF)是基于规则的学习,具有较高的分类精度,能够清楚地了解训练模型的结构和特征,并且RF是基于小样本学习的一种机器学习方法,因此本文提出一种基于随机森林模型的电机异音故障诊断方法。该方法首先搭建一套汽车智能座椅靠背电机振动测试平台,用于采集实验数据;然后提取电机振动信号特征,并通过主成分分析(principal component analysis, PCA)法对故障特征进行降维;最后分别训练RF分类模型和概率神经网络(probabilistic neural network,PNN),对其识别性能进行评估。
1 实验数据
实验数据由搭建的汽车智能座椅靠背电机振动测试平台采集,内部结构如图1所示,包括电柜与PC机、显示器、打印机、测试平台、按钮、阀岛、传感器分线盒和一个气泵组成。其中按钮用于控制测试的启动、停止、复位或者调整手自动模式;阀岛用于将气泵的气传输至各气缸;传感器分线盒是数字信号传感器的集中连接器,用于将多个数字信号传感器的信号集合并统一与PC进行信息交互;电柜用于集中的电气控制;打印机用于测试结束后将测试结果打印出来;测试平台用于将所测汽车靠背固定、测试并采集数据。

图1 汽车靠背电机振动测试平台结构Fig. 1 Structure of vibration testing platform for automobile backrest motor
数据采集时,将汽车靠背放在测试位置并将电机插头插上,按下启动按钮后左右两边的定位梢气缸伸出将汽车靠背固定住;左右两边的传感器夹紧气缸夹紧振动传感器,伸缩气缸伸出并将头部装配有磁铁的传感器紧贴在汽车靠背的转轴处;再次按下启动按钮,上位机程序控制电机的插头输出+13.5 V或者-13.5 V的电压,以控制靠背电机的正反转,使靠背实现图2所示的运动周期。
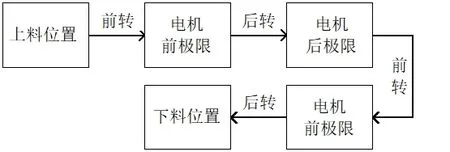
图2 运动周期流程图Fig. 2 Flow chart of motion period
图2中当汽车靠背处在上料位置与下料位置时,靠背电机的角度是相同的,此时通过贴在汽车靠背转轴处的两个振动传感器采集振动信号;振动信号经过放大器放大后,被USB-6212的数据采集卡接收,然后通过上位机LabVIEW程序中的DAQMX将信号采集并以TDMS形式保存。信号采集与传输流程如图3所示。
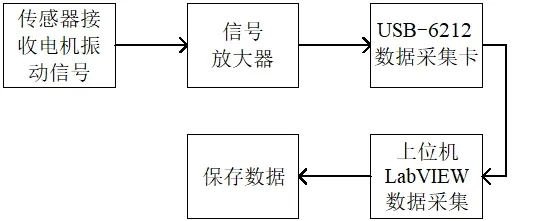
图3 信号采集与传输流程图Fig. 3 Flow chart of signal acquisition and transmission
汽车靠背电机振动测试平台所使用的传感器为丹麦B&K公司生产的4534-B-002型传感器,如图4所示。该振动传感器使用密封钛外壳和绝缘底座,采用10-32UNF螺纹安装,不仅重量轻,还非常坚固,且拥有频率范围广、安装范围广、噪音低、对环境敏感度低的特性,适合多种环境条件下使用。

图4 4535-B-002型振动传感器Fig. 44535-B-002 vibration sensor
4534-B-002型传感器参数如表1所示。
数据采集时,将采样频率设为20 kHz,每30~35 s采集1组数据,共采集92组数据,其中24组数据为不合格数据。某组不合格数据如图5所示。

图5 不合格电机振动信号图Fig. 5 Vibration signal diagram of unqualified motor
2 电机异音故障诊断
电机异音故障诊断流程如图6所示,包括数据采集、特征提取、PCA降维、划分训练集和测试集、建立RF和PNN异音识别分类器模型、评估分类性能几个部分。

图6 电机异音故障诊断方法流程图Fig. 6 Flow chart of motor abnormal sound fault diagnosis method
2.1 特征提取
特征提取时,采用窗口法,将整个信号以窗口为单位(窗宽设定为采样频率的1/5,即w=fs/5),对每个窗口里的小信号分别提取峰峰值、平均值、均方值、标准差、有效值、峰值因子、脉冲因子、波形因子、裕度因子、偏度因子和峭度因子等11个特征指标,从而形成一个特征向量作为分类器的输入。
峰峰值描述了电压信号变化范围的大小,是电压信号最大值和最小值之间的差值,计算公式如式(1)所示。
式中:xpp、xmax、xmin分别为电压信号的峰峰值、最大值和最小值,V。
平均值是一段时间内电机振动电压信号的平均值,计算公式如式(2)所示。
式中:xi为离散信号点的电压,V;xˉ为电压信号的平均值,V;N为信号的采样点个数,个。
均方值是一段时间内电机振动电压信号平方的平均值,在工程上表示信号的平均功率,计算公式如式(3)所示。
式中:xe为电压信号的均方值,V2。
标准差是方差的算术平方根,反映电机振动信号的离散程度,计算公式如式(4)所示。
式中:xrmse为电压信号的标准差,V。
有效值是电机振动电压信号的均方根,也称为均方根值,计算公式如式(5)所示。
式中:xrms为电压信号的有效值,V。
峰值因子是电机振动电压信号最大值与有效值的比值,表示电机振动电压信号峰值与整体波形相比的极端程度,计算公式如式(6)所示。
式中:Cf为信号的峰值因子。
脉冲因子是电压信号峰值与整流平均值的比值,表示信号的冲击特性,计算公式如下:
式中:If为信号的脉冲因子。
波形因子是电压信号的均方根与绝对平均值的比值,也即电压信号脉冲因子与峰值因子的比值,表示振动信号波形与标准正弦波相比的失真程度,计算公式如式(8)所示。
式中:Sf为信号的波形因子。
裕度因子是电压信号峰值与方根振幅的比值,表示电机振动信号的饱满程度,计算公式如式(9)所示。
式中:Lf为信号的裕度因子;xr为方根幅值,V。
偏度因子也叫偏斜度、偏态,是电压信号三阶中心矩和标准差的三次方的比值,代表电机振动信号的峰值分布,计算公式如式(10)所示。
式中:Sk为信号的偏度因子。
峭度因子是电压信号四阶中心矩除以标准差的四次幂,表示信号波形的平缓程度,计算公式如式(11)所示。
式中:Kv为信号的峭度因子;β为信号的四阶中心矩,V4。
将所有信号以fs/5为窗宽进行分割,然后进行特征提取,得到特征向量空间X,大小为12×14238(行数表示特征,列数表示特征样本数);再采用人工方法进行标定,其中正常段标为0,异音段标为1,从而形成标签向量C,大小为1×14238(14238为标签数量)。
2.2 PCA降维
PCA降维用于降低所提取的11个电机异音信号特征的维数。在正确区分电机正常振动信号与异音信号的情况下,保留特征分类精度,通过降低网络输入的维数,减少数据冗余并提高模型的训练效率。
采用MATLAB软件库中的函数“[c,s,l,ts,e]=pca(X)”进行主成分分析,并实现降维。其中,c是特征向量空间X对应的协方差矩阵的所有特征向量组成的矩阵,即变换矩阵或投影矩阵,其每一列按特征值从大到小排序,分别代表特征值所对应的特征向量;s表示原数据在各主成分向量上的投影;l表示主成分方差,也就是各特征向量对应的特征值,按照从大到小排列;ts表示特征空间X中每个观察值的T平方统计量,用来衡量多变量之间的距离;e表示每个主成分的贡献率。通过搜索贡献率大于1的特征,舍弃其余特征,从而降低特征维数[12]。
2.3 基于随机森林算法的电机异音诊断
随机森林是由多个决策树组成的分类器。在每棵树的节点上,从所有原始特征中随机选择若干特征。特征数据在决策树中被分割产生叶节点(表示类的标签),从根节点到叶节点的路径表示一个确定的决策过程。当样本在随机森林中分类时,每棵树都会得到一个分类结果,即对类的投票,随机森林根据“少数服从多数”的原则,将投票数量多的类作为最终的类别值输出。
在MATLAB中,可以使用“RANDOM FOREST MATLAB”工具箱实现RF分类器模型的训练与测试,其中RF分类器模型的训练可以使用函数“Rtr(p,u,ntree)”(p是特征矩阵中作为训练集的部分,u是标签中作为训练集的部分,ntree是决策树的数量,设为30)进行。训练完成后输出变量mrf表示已经训练好的随机森林模型,随后使用函数“Rte(Y,mrf)”[13-14](Y为特征矩阵中划分为测试集的部分)对训练好的模型进行测试,并对模型的准确性进行评估。
2.4 分类器分类性能评价指标
本文选择特异性SP、敏感度Se、准确性Ac和卡帕系数K来评估分类器的分类性能。在汽车智能座椅靠背电机振动信号识别过程中,特异性SP表示原信号属于异音信号而被正确识别的比例,计算公式如式(12)所示。
式中:Tn表示原信号是异音信号的情况下识别为异音信号的数量,FP表示原信号是正常信号的情况下识别为异音信号的数量。
敏感度Se表示原信号属于正常信号而被正确识别的比例,计算公式如式(13)所示。
式中:Tp表示原信号是正常信号的情况下识别结果归类为正常信号的数量;Fn表示原信号是异音信号的情况下识别为正常信号的数量。
Tp、Tn、Fp、Fn分别代表样本检测的真阳性、真阴性、假阳性、假阴性,它们共同构成了混淆矩阵。在评价过程中,Tp和Tn的值越高,代表模型识别的精确度越高;Fp和Fn的值越高,代表模型识别的精确度越低。
准确度Ac是指分类器预测结果正确的比例,计算公式如式(14)所示。
Kappa系数K用来评估模型的综合表现,取值在[0,1]之间,且越接近1,分类器的分类精度越高,计算公式如式(15)所示。
其中,po=。
式中:po是每一类正确分类的样本数量之和除以总样本数,也就是总体的分类精度;pe表示所有类别对应的实际数量和预测数量的乘积再和总样本数的平方相除;m为测试集的总样本数;r为分类的类别数,此处为2;qn为混淆矩阵中的主对角线元素;qt+表示混淆矩阵中各行向量所有元素的和;q+t表示混淆矩阵中各列向量所有元素的和。
Kt是每个分类结果所对应的Kappa系数,计算公式如式(16)所示。
式中:Ptt=。
3 结果与讨论
将采集到的92组数据以fs/5为窗宽进行分割,得到大小为14238×11的特征空间;再采用人工方法进行标定,其中正常段标为0,异音段标为1,然后对提取的11个时域特征采用主成分分析法进行分析,得到各主成分的方差;根据方差得到每个主成分的贡献值,以返回主成分空间。最终得到各特征的贡献比例如表2所示。
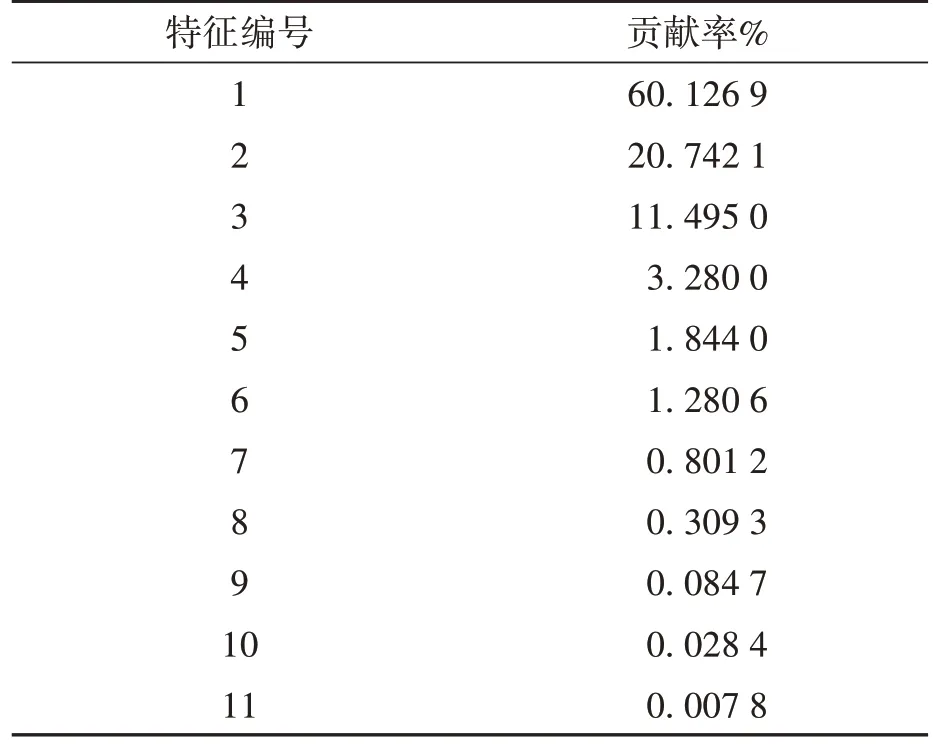
表 2 各特征贡献比例表Table 2 Table of contribution ratio of each feature
从表2可以看出,贡献率大于1%的共有6个特征,即这6个特征对区分正常信号和异音信号的作用较大。
将得到的6个特征归一化后,从14238个样本中随机选取2000个样本作为测试集,剩余12238个样本作为训练集,进行RF分类器分类;再从训练集中随机抽取样本进行模型训练,然后从测试集中随机抽取样本对模型进行测试,总共进行了100次重复实验;最后用特异性Sp、灵敏度Se、准确度Ac和Kappa系数K的平均值及其标准差,对基于随机森林的电机异音故障诊断模型和基于PNN的电机异音故障诊断模型的分类性能进行评价,结果如表3所示,某一组异音识别结果如图7所示。

表3 RF和PNN分类结果Table 3 Classification results of RF and PNN
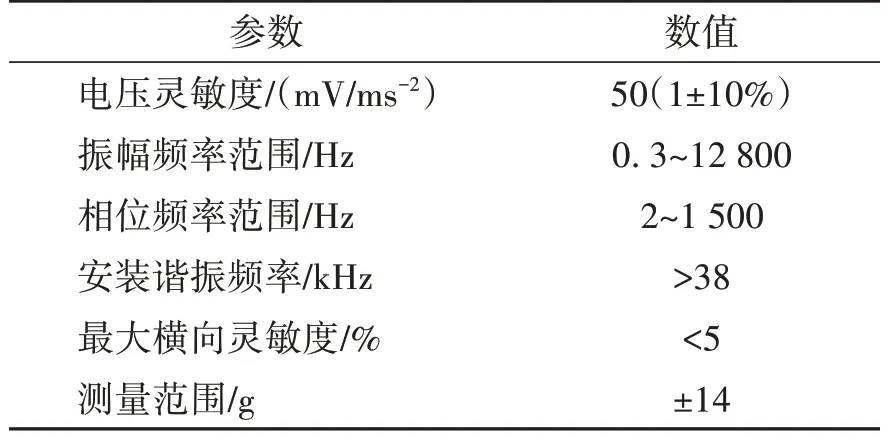
表 14534-B-002型传感器主要参数Table 14534-B-002 main parameters of the sensor
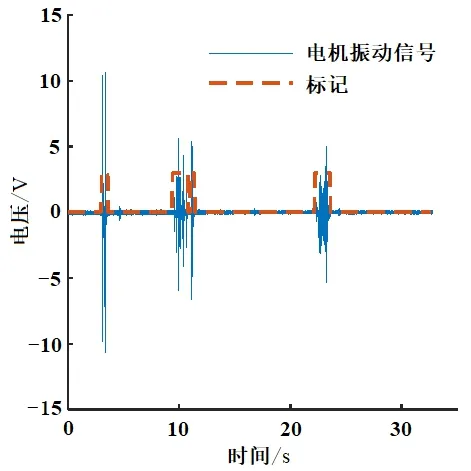
图7 异音信号识别结果图Fig .7 The recognition result of abnormal sound signal
图7中,虚线为标记线,值为0或1。若分类器对信号段识别为异音信号时,其值为1;若分类器对信号段识别为正常信号时,其值为0。
由表3可知,基于RF模型的电机异音故障诊断分类器能够准确地对数据集中样本的正常状态和异音状态进行分类,且识别精度较高,总体分类性能也高于基于PNN的电机振动信号异音故障诊断分类器。
4 结论
结合产品生产线上的异音检测步骤,采用基于振动信号的检测方法,搭建了汽车智能座椅靠背电机振动测试平台。实验结果表明,本文提出的基于RF分类器的异音故障诊断能够在不需要大样本训练的情况下获得较好的效果,可以方便企业在实际生产中对模型进行训练;通过已训练好的模型对实际生产中的汽车靠背电机进行测试,识别精度较高,总体分类性能也高于基于PNN的电机振动信号异音故障诊断分类器。
