计及阻尼特性的构网型并网逆变器暂态同步稳定性分析
2023-08-09李明飞吴在军全相军黄仁志
李明飞,吴在军,全相军,朱 玲,李 威,黄仁志
(1.东南大学电气工程学院,江苏省南京市 210096;2.国电南瑞科技股份有限公司,江苏省南京市 211106)
0 引言
随着以并网逆变器(grid-connected inverter,GCI)为接口的风电和太阳能发电等新能源电源大规 模 并 网[1],同 步 发 电 机(synchronous generator,SG)主导特性逐渐减弱,GCI 逐渐成为影响电力系统稳定运行的关键因素[2-3]。传统GCI 采用锁相环作为同步单元,在公共耦合点处与电网实现同步,也被称为跟网型并网逆变器(grid-following gridconnected inverter,GFL-GCI)[4-7]。GFL-GCI 由 于其低惯量特性,大量接入后使得电网调节能力下降,危害电网的稳定运行。以虚拟同步发电机(virtual synchronous generator,VSG)为典型控制方式的构网型并网逆变器(grid-forming grid-connected inverter,GFM-GCI)[8-9]通 过 模 拟SG 摇 摆 方 程 使GCI 具有为电网提供电压和频率支撑的能力,受到广泛关注。
对于GFM-GCI 的研究多集中在参数设计[10-12]、控制方法改进[13-14]、多机并联[15-16]、小扰动稳定性分析[17]等。在微电网中,逆变器遇到大扰动故障时,通过主动脱网来保证系统的稳定性[18]。然而,电网中新能源电源大规模脱网会严重影响电力系统的频率调节能力及稳定性,因此GFM-GCI 需要具备一定应对大扰动故障不脱网的能力[19]。
近年来,针对GFM-GCI 在大扰动故障期间的暂态同步稳定问题已经进行了许多分析和讨论。文献[20]利用相平面法研究了4 种控制方式的GFMGCI 暂态同步稳定过程,可以准确、快速地分析系统的暂态同步稳定过程,并且定量揭示控制参数对稳定性的影响。文献[21]针对VSG 大扰动下的暂态行为,采用线性模型定性分析和非线性模型定量分析相结合的方法评估系统的稳定性。文献[22]采用相平面法深入研究了采用下垂控制方式的GFMGCI 暂态同步稳定机理。文献[23]考虑了传统等面积法则(equal area criterion,EAC)忽略阻尼项的缺陷,提出了一种基于阻尼项缩放和线性逼近的改进EAC,有效提高了暂态稳定域的估计精度。文献[24]借助最小二乘法等数学工具对VSG 暂态同步稳定性进行量化分析,提出一种改善暂态同步稳定性的惯量、阻尼参数灵活切换策略。文献[25-26]将摄动理论中的平均化法和多尺度法应用到GFLGCI 的稳定性分析中,得到了锁相环非线性微分方程的显式解析解,为新能源暂态稳定研究拓展了新思路。值得注意的是,与GFL-GCI 暂态特性主要取决于锁相环不同,GFM-GCI 的暂态同步稳定特性主要由有功控制环节决定。
综上,目前多通过相平面法等数值或仿真方法研究GFM-GCI 的暂态同步稳定问题,其优点在于能够直观反映系统暂态同步稳定与失稳情况,面向特定系统定量研究控制参数对暂态稳定的影响,但难以从物理角度揭示GFM-GCI 控制参数对暂态同步稳定性的影响机理。此外,对于GFM-GCI 的功角解析模型尚未见研究,通过数值分析方法求解的GFM-GCI 功角动态轨迹缺乏显式解析表达式,难以为面向暂态同步稳定的控制参数设计提供指导。
本文首先在考虑阻尼特性的基础上采用EAC,从能量角度阐述GFM-GCI 控制参数对暂态同步稳定性的影响机理。然后,基于多尺度法求解功角非线性微分方程的解析解,进而得到暂态同步稳定边界,并给出一种面向GFM-GCI 暂态同步稳定的控制参数设计方法,所提控制参数设计方法与现有暂态分析方法相比具有更低的保守性。最后,通过仿真和硬件在环实验验证了理论分析、解析模型与所提控制参数设计方法的有效性。
1 系统结构
典型GFM-GCI 控制结构如图1 所示,逆变器内环采用电压电流闭环控制,外环采用VSG 控制方式。图中:Vdc为直流侧电压;Lf和Cf分别为逆变器滤波电感和电容;Lg为线路电感;if为滤波电流;ig为逆变器端输出电流;E为逆变器端电压;Ug为电网电压;Pe和Qe分别为输出有功功率和无功功率。有功控制和无功控制环节分别产生相位信号θref和电压幅值Uref,作为输入电压电流内环的参考值,产生脉宽调制(PWM)驱动信号,最后实现逆变器并网同步。
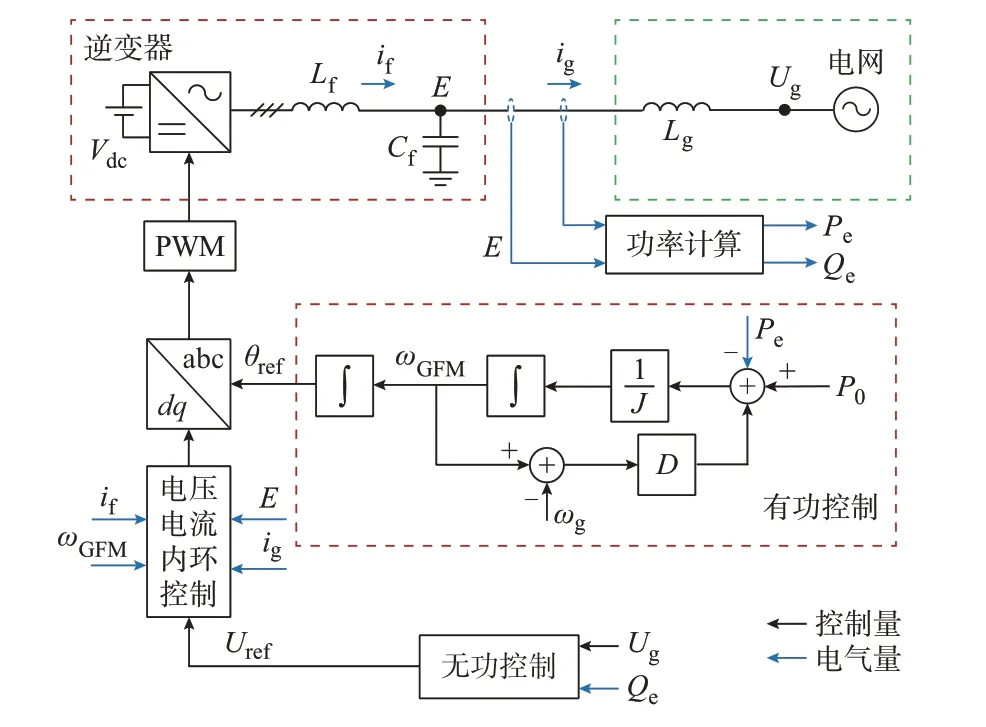
图1 GFM-GCI 控制结构框图Fig.1 Block diagram of GFM-GCI control structure
由于电压电流内环动态响应速度远快于有功控制环,在分析暂态问题时将内环控制的输出视为理想增益,GFM-GCI 的暂态同步稳定特性主要由有功控制环决定,其控制律可表示为:
式中:J为惯量参数;ωGFM为有功控制环输出角频率;ωg为电网角频率;P0为输出有功功率参考值;D为阻尼参数。
类比传统同步发电机,定义系统功角δ为电网电压Ug和逆变器端电压E的夹角,可表示为:
逆变器侧可以等效成一个受控电压源,则逆变器输出有功功率Pe为:
式中:Xg为线路电抗。
联立式(1)—式(3),可以得到描述δ动态响应特性的二阶非线性数学模型为:
2 基于考虑阻尼EAC 的机理分析
SG 的一次调频能力取决于发电机自动调速器,而阻尼来源于阻尼绕组和机械摩擦等,受实际物理结构影响一般较小,在进行暂态分析时可忽略不计。在GFM-GCI 中,阻尼环节同时承担有功功率-频率下垂功能和阻尼功能,既起到一次调频作用,又抑制扰动下的功率振荡,因此,阻尼参数一般较大。不考虑阻尼参数会使GFM-GCI 暂态稳定性判断结果非常保守,故其不可忽略。
基于式(4),系统等效摇摆方程可以表示为:
式中:S+为系统加速面积;δ0为故障前稳定平衡点功角值;Pe2为故障后的输出有功功率;δc为Pm=Pe2时的功角值;δu为故障后不稳定平衡点功角值;S-,max为系统最大减速面积;Pmu为S-,max对应的等效机械功率;δcu为S-,max对应Pmu=Pe2时的功角值。
系统在发生电网电压跌落故障时的功角曲线和相图曲线如图2 所示。图中:Pe1为故障前输出有功功率;Pm1和Pm2为等效机械功率;ΔS1+和ΔS2+为系统加速面积改变量;δs为故障后稳态平衡点功角值;δm为暂态期间功角最大值;Dref和Jref分别为阻尼参数D和惯量参数J的参考值。
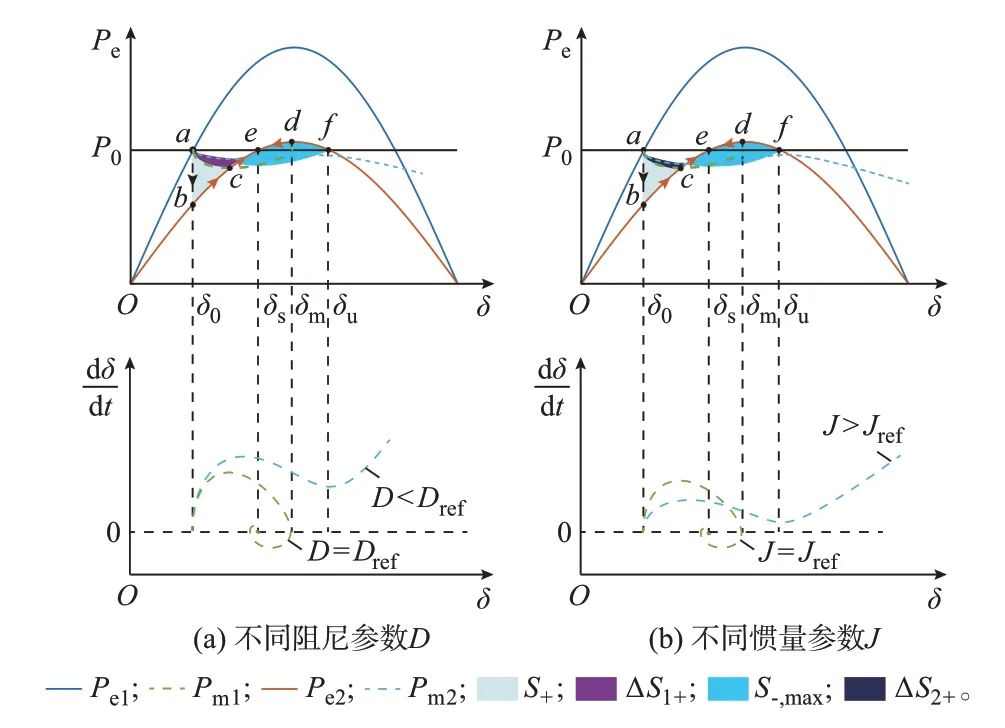
图2 不同控制参数下GFM-GCI 的Pe-δ 曲线与对应dδ/dt-δ 曲线Fig.2 Pe-δ curves and corresponding dδ/dt-δ curves of GFM-GCI with different control parameters
当故障发生时,工作点由初始稳定平衡点a突变到点b,此时系统不平衡功率ΔP=Pm-Pe>0,δ增加。当δ增加至ΔP<0 后,由于Pm与D(dδ/dt)相关,因此在不同控制参数下动态轨迹不同。同时,Pm自身已反映了暂态情况:当系统稳定后,Pm保持不变;当系统失稳后,Pm持续减小。因此,无须再对减速面积进行讨论。如图2(a)所示,当D=Dref时,S+<S-,max,工作点在运动到点d时dδ/dt=0,然后在ΔP<0 的作用下向点e移动并在点e附近摇摆,最终在阻尼的作用下稳定在点e。综上,δ在暂态稳定过程中经历a→b→c→e→d→e的变化。当D<Dref时,系统加速面积增加,S++ΔS1+>S-,max,在点f后始终有dδ/dt>0,δ一直增加直至发散,δ在失稳过程中的轨迹为a→b→c→e→d→f→∞。因此,δm≤δu是保证系统暂态同步稳定的条件。惯量参数J不同时的曲线如图2(b)所示。当J=Jref时,S+<S-,max,系统暂态同步稳定;当J>Jref时,S++ΔS2+>S-,max,系统暂态同步失稳。
控制参数D和J对系统暂态同步稳定性的影响如表1 所示。Pm会随阻尼参数D和功角导数dδ/dt的改变而改变:一方面,当D增加时,PDm增加,Pm减小,进而S+减小,增强了系统的暂态同步稳定性;另一方面,J减小会增加d2δ/dt2,dδ/dt受d2δ/dt2增加的影响而增加,PDm增加,导致Pm减小,S+减少,增强了系统的暂态同步稳定性。
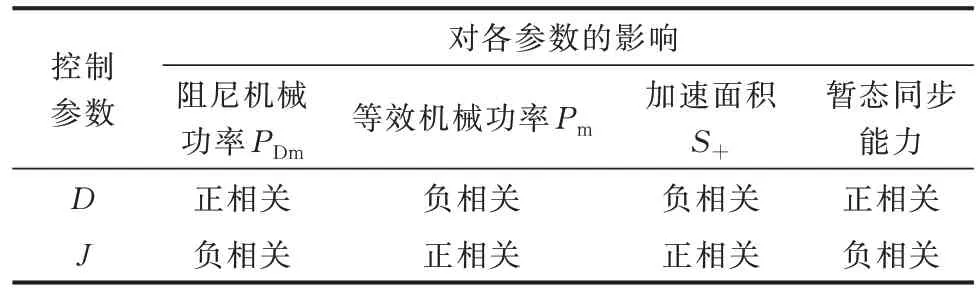
表1 控制参数对暂态同步稳定性的影响Table 1 Influence of control parameters on transient synchronization stability
综上,考虑阻尼的EAC 揭示了控制参数对系统暂态同步稳定性产生影响的物理机制:在故障后平衡点存在的持续扰动情况下,增加D和减小J有利于减小等效机械功率Pm,进而减小系统加速面积S+,改善系统暂态同步稳定性。
3 基于多尺度法的解析分析
由于式(4)中阻尼项D(dδ/dt)的存在,应用EAC 进行定量分析难以实现。本章借鉴奇异摄动理论中的方法展开定量研究。目前已经有多种非线性微分方程的解析求解方法,如小参数法、平均法[25]、多尺度法等[26]。多尺度法不仅可以分析周期运动,也可以分析耗散系统的衰减振荡,在动态系统的稳态响应和动态响应分析中具有优越性。因此,本文采用多尺度法进行解析分析。
3.1 解析求解
应用摄动理论求解析解时要求非线性微分方程的非线性项为自变量的多项式函数,因此,首先通过泰勒公式拟合式(4)。为保证拟合方程与原方程具有相同的初始值,在系统故障前,稳态平衡点δ0对sinδ进行二阶泰勒展开,则δ0可以表示为:
假设故障后电网电压为Ugf,对sinδ进行二阶泰勒展开并代入式(4),得到拟合后的非线性二阶微分方程为:
拟合解与真实解的对比结果如附录A 图A1 所示。附 录A 图A1(a)为 当Ugf=0.5Ug时 的δ-t曲线,拟合解与真实解结果完全一致。图A1(b)为当Ugf=0.3Ug时δ-t曲线的失稳轨迹,拟合解在失稳后略大于真实解,这是由于泰勒展开时忽略了高阶项,在暂态分析尺度上拟合解满足要求。综上,式(8)可以代替式(4)作为描述GFM-GCI 暂态同步稳定过程的数学模型。
对式(8)采用多尺度方法求δ(t)的解析解,引入小参数ε,将式(8)写成以下形式的拟线性微分方程:
式(10)中,ε[β(dδ/dt)+γδ2]是只与δ、dδ/dt有关的非线性项,可以视为对线性系统的扰动项,即摄动理论中的摄动项。应用多尺度法求式(10)的一阶解析解,取两个时间尺度t0和t1:
不同时间尺度视为互相独立的量,因此设解析解的形式为:
式中:δ0(t)为时间尺度t0对应的解;δ1(t)为时间尺度t1对应的解;o(ε2)为ε的高阶项。
对时间的微分可以表示为:
式中:D0和D1为偏微分算子,如式(15)所示。
将式(13)、式(14)代入式(10)并略去高阶项o(ε2)得到:

式中:a0和φ0为复系数A(t1)中的待求常系数。
根据系统的初始状态可以求得常系数a0和φ0,得到δ(t)的数学解析模型如式(26)所示。
其中
式(26)为δ的数学解析模型,由正弦项和常数项组成。其中,正弦项的幅值随时间衰减,体现耗散系统在暂态过程中的衰减振荡特性,而常数项体现系统的稳态特性。
3.2 暂态稳定判据及参数设计方法
系统保持暂态同步稳定的判定条件为δ首次增加过程中不越过不稳定平衡点δu的位置,因此功角首次振荡的幅值δm与δu的关系可以作为判断系统暂态稳定的条件。定义GFM-GCI 暂态同步稳定判据Δ=δm-δu:当Δ≤0 时,系统暂态同步稳定;当Δ>0 时,系统暂态同步失稳。
图3 展 示 了 由D、J和δ组 成 的GFM-GCI 三 维空间。其中,δu曲面中δ恒等于δu,δm曲面为不同D、J和相应解析模型得到的δm所组成的三维曲面。从图3 可以看出,随着J的减小和D的增加,δm减小,这与第2 章结论一致。基于稳定判据,当δm曲面位于δu曲面下方时,Δ≤0,系统在故障后保持暂态同步稳定;当δm曲面位于δu曲面上方时,Δ>0,系统在故障后暂态同步失稳。
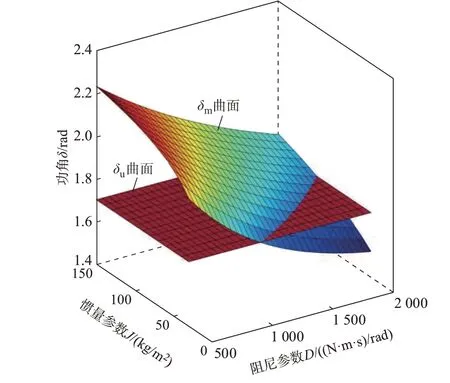
图3 电网故障时不同J 和D 参数下的δm 和δu 曲面Fig.3 δm and δu surface with different J and D when grid fault occurs
基于解析解和暂态同步稳定判据,提出一种面向GFM-GCI 暂态同步稳定的控制参数设计方法。当惯量参数初始值J0一定或阻尼参数初始值D0一定时,阻尼参数的最小值Dmin和惯量参数的最大值Jmax可表示为:
式中:f(δ)为关于δ0和δs的函数,与系统运行工况直接相关,如式(29)所示。
式(28)给出了故障时保证系统暂态同步稳定的D取 值 下 限 和J的 取 值 上 限,即D≥Dmin∩J≤Jmax,可以有效指导暂态同步稳定下GFM-GCI 的控制参数设计。
综上,本文面向暂态同步稳定的GFM-GCI 控制参数设计方法流程如附录A 图A2 所示,分为以下3 个步骤进行。
步骤1:输入系统运行工况参数P0、E、Ug、Xg,根据式(7)求出故障前稳定平衡点功角值δ0。
步骤2:输入故障电网电压Ugf,根据式(20)求出故障后稳定平衡点和不稳定平衡点功角值δs和δu,其中δu=π-δs。
步骤3:输入控制参数初始值D0和J0,根据式(28)分别确定惯量参数J的最大值Jmax和阻尼参数D的 最 小 值Dmin。
4 仿真分析
为了验证理论分析的准确性,在MATLAB/Simulink 中搭建仿真模型,主要仿真与实验参数如附录A 表A1 所示。
4.1 不同控制参数结果
在不同阻尼参数D和惯量参数J下验证第2 章的分析,其仿真结果见附录B 图B1 和图B2。图B1为电网电压跌落时不同D下的δ-t曲线与相图。当D从1 592 (N·m·s)/rad 减小到1 092 (N·m·s)/rad时,暂态过程中δm增加但仍小于δu。当D继续减小至592 (N·m·s)/rad 时,δ越过不稳定平衡点位置后持续增加,系统暂态失稳。图B2 表示在电网电压跌落时不同J下系统的暂态响应特性。当J由57.1 kg/m2增加 到114.2 kg/m2时,dδ/dt减小,暂态过程中δm增加,但系统仍保持暂态同步稳定。当J增加至342.6 kg/m2时,δ在不稳定平衡点处dδ/dt仍大于0,δ继续增加直至与电网失去同步。
4.2 解析解结果
如图4 所示,δ随时间变化逐渐收敛,最终dδ/dt为0,系统暂态同步稳定。此时,δ解析解的轨迹与实际仿真轨迹完全相同。图5 表示当Ugf=0.55Ug时,解析解的幅值和振荡周期与仿真解相比存在微小的误差,但仍可以较准确地反映暂态期间功角情况。
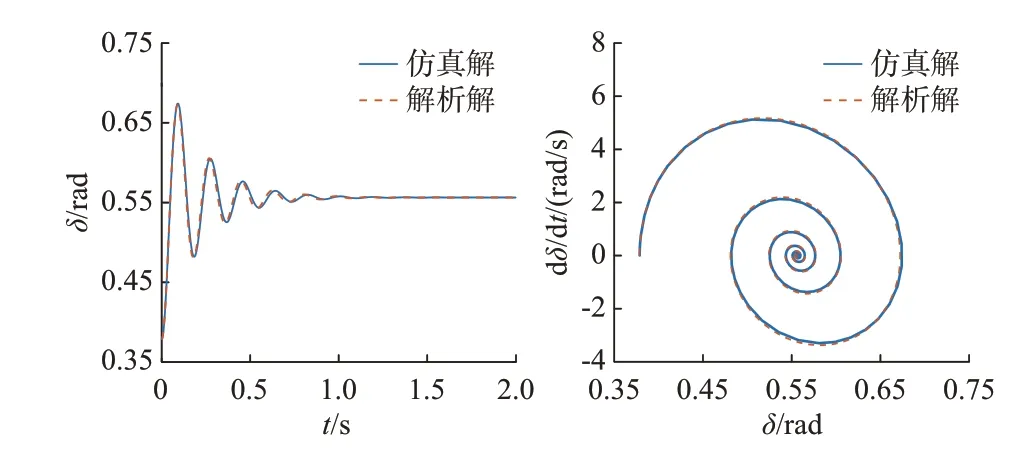
图4 当Ugf=0.7Ug时δ-t 曲线与对应相图Fig.4 δ-t curves and corresponding phase portraits when Ugf=0.7Ug
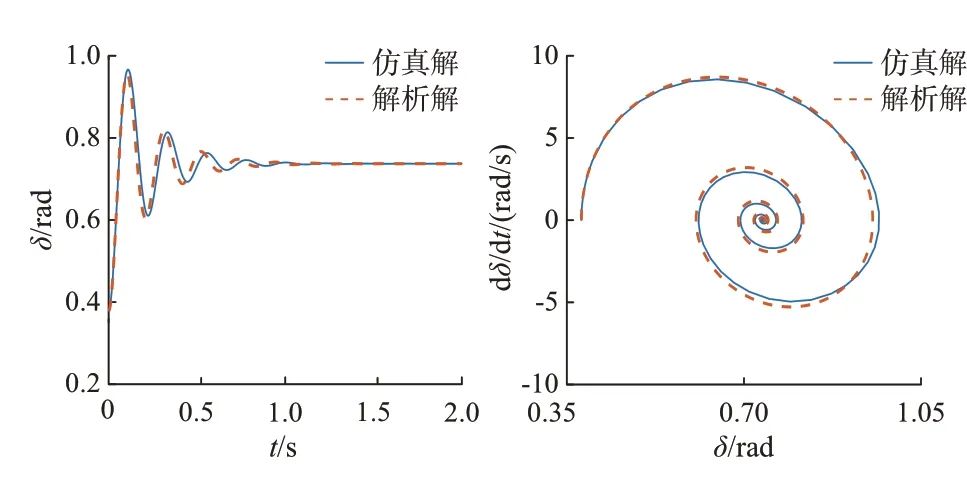
图5 当Ugf=0.55Ug时δ-t 曲线与对应相图Fig.5 δ-t curves and corresponding phase portraits when Ugf=0.55Ug
如图6 所示,仿真结果中δ在越过不稳定平衡点后,由于dδ/dt仍大于0,δ持续增加,系统失稳。而解析解在应用多尺度法时假设其解析表达式形式为幅值衰减的正弦函数,所以解析解与仿真时的失稳发散轨迹并不相同。但是,解析解的首次振荡幅值可以反映仿真的情况,系统暂态同步稳定与否取决于δm与δu的关系,解析解依然能作为判断系统暂态同步情况的工具。
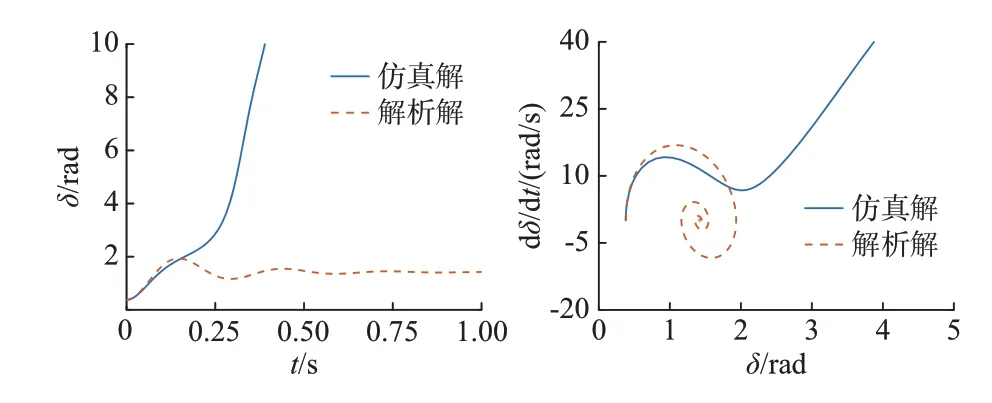
图6 当Ugf=0.38Ug时δ-t 曲线与对应相图Fig.6 δ-t curves and corresponding phase portraits when Ugf=0.38Ug
功角最大值可以反映解析解的准确程度,故障前稳定平衡点和故障后稳定平衡点的差值可以体现系统非线性程度。定义相对误差值e=(δmaδmr)/δmr,其中,δma为解析解功角最大值,δmr为仿真解功角最大值。定义非线性程度n=δs-δ0。表2对不同故障程度下的解析解与仿真解相对误差进行量化评价。由表2 分析可知,相对误差e随着非线性程度n的增加而增加,解析解偏离仿真解的程度增大,但仍能较准确地反映仿真解的情况。
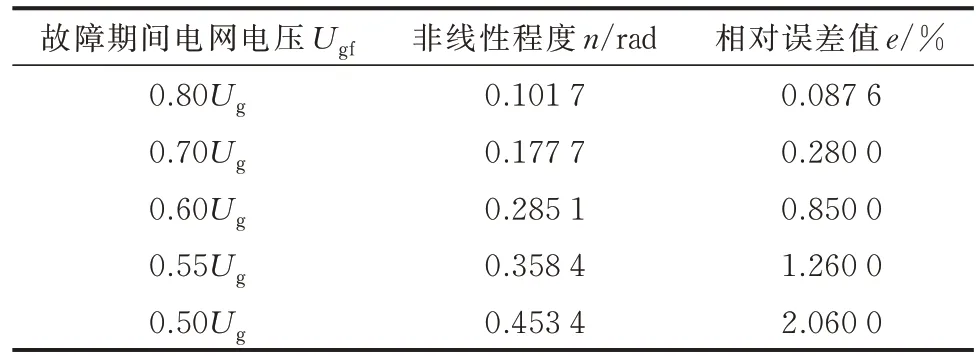
表2 解析解与仿真解相对误差Table 2 Relative error of analytical solution and simulation solution
4.3 稳定判据与参数设计结果
系统在不同J和D参数下的暂态同步稳定边界如图7 所示。图中:浅蓝色部分(Δ≤0)保证该区域控制参数下系统暂态同步稳定;而白色部分(Δ>0)为系统暂态失稳区域。
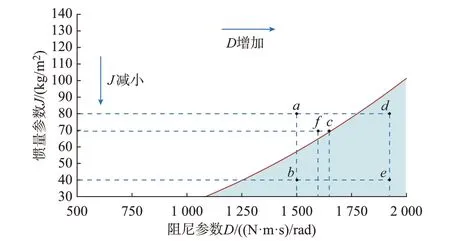
图7 当Ugf=0.373Ug时不同J 和D 下的暂态同步稳定边界Fig.7 Transient synchronization stability boundary with different J and D when Ugf=0.373Ug
图8 为Ugf=0.373Ug时不同控制参数对应的仿真结果,其中a到f中的控制参数分别对应图7 中a点到f点,其控制参数、稳定判据值、评判结果及仿真结果如表3 所示,对应的不同控制参数初始值J0和D0下的控制参数优化设计结果Jmax和Dmin如表4所示。
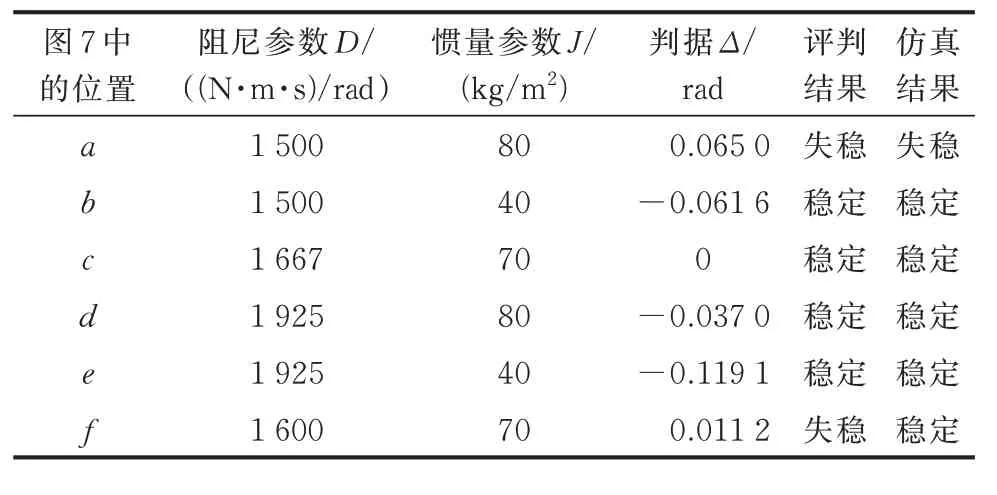
表3 不同控制参数下稳定判据结果与仿真结果Table 3 Stability criterion and simulation results with different control parameters
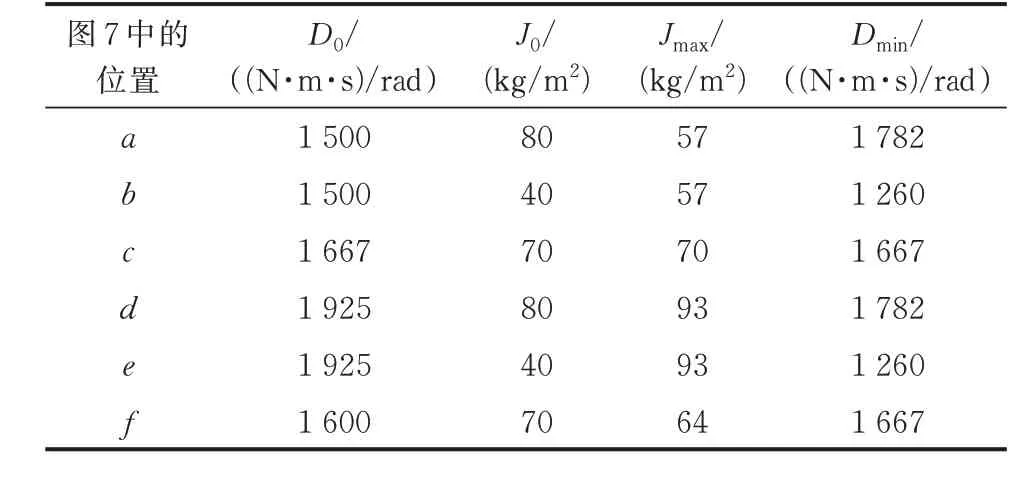
表4 控制参数D 和J 的优化设计结果Table 4 Optimal design results of control parameters D and J
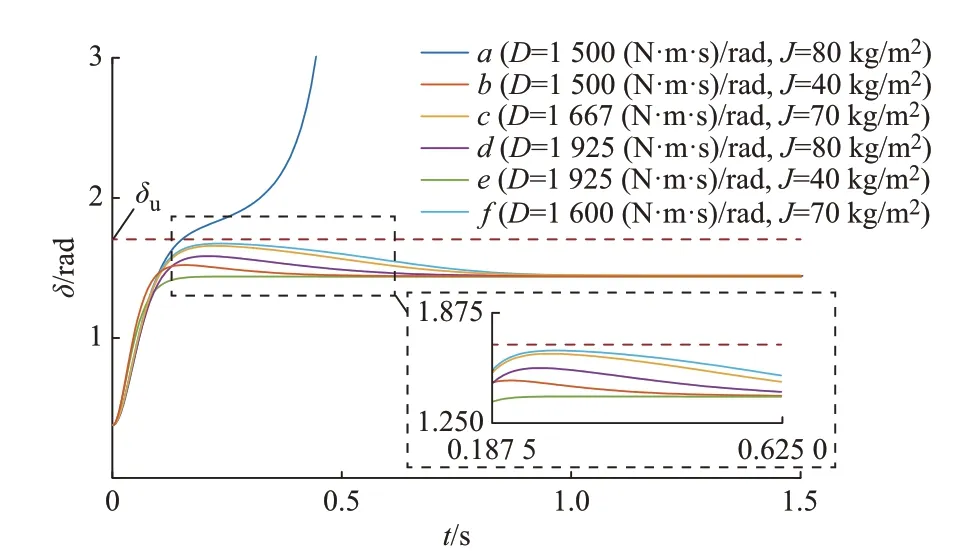
图8 当Ugf=0.373Ug时不同控制参数下δ-t 曲线Fig.8 δ-t curves with different control parameters when Ugf=0.373Ug
图8 中a和b为在相同D和不同J下δ(t)的仿真结 果,当J从80 kg/m2减 小 至40 kg/m2,对 应 图7 中点a变 化 到 点b,稳 定 判 据Δ由0.065 0 rad 变 为-0.061 6 rad,系统状态由失稳变为稳定,仿真与判断结果一致;a和d为在相同J和不同D下的δ(t)仿 真 结 果,当D从1 500 (N·m·s)/rad 增 加 至1 925 (N·m·s)/rad,对应图7 中点a移动到点d,稳定判据Δ由0.065 0 rad 变为-0.037 0 rad,判断结果由失稳变为稳定,与仿真一致;e对应稳定判据Δ=-0.119 1 rad,相比图8 中其他情况稳定性更好,稳定判据Δ的值越小,表明其暂态同步稳定性越好。上述结果既证明了第2 章中分析的正确性,也验证了稳定判据的有效性。
图8 中c对应稳定判据Δ=0 rad,当D由1 667 (N·m·s)/rad 减小至1 600 (N·m·s)/rad 时,稳定判据Δ=0.011 2 rad,判定结果为失稳,而仿真结果表明系统稳定。这是由于解析解在泰勒展开时忽略了高阶项,同时解析方法本身存在误差,使稳定判据具有一定的保守性,其结果有利于为系统稳定性判断提供一定的裕度。
4.4 与现有暂态分析方法对比结果
现有暂态稳定分析方法主要有EAC 和暂态能量函数(transient energy function,TEF)法,两者从数学角度完全一致,因此本文称其为忽略阻尼的TEF/EAC 法[3,6]。文献[27]针对GFM-GCI 的大阻尼特性提出了一种阻尼能量函数法,即DRTEF 法,相比经典方法降低了稳定范围估计的保守性[28]。
为验证本文提出的解析法估计稳定边界的优势,现与忽略阻尼的TEF/EAC 法、DRTEF 法和数值仿真法进行比较。4 种方法得到的暂态同步稳定边界如图9 所示,本文解析法得到的稳定边界和忽略阻尼的TEF/EAC 法、DRTEF 法相比,更接近数值仿真法得到的真实稳定边界,具有更大的稳定范围,保守性更低,体现了本文解析法的优势。
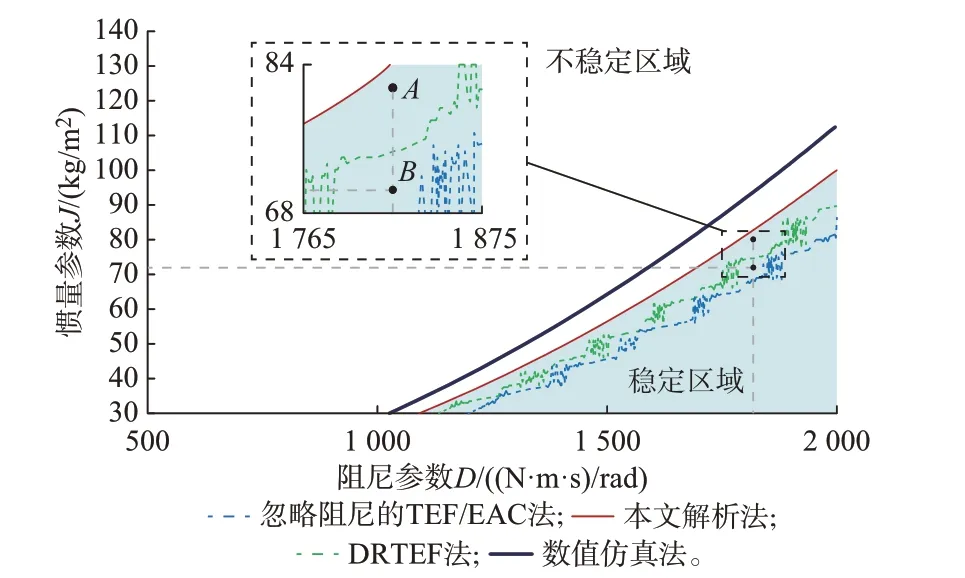
图9 4 种方法的稳定边界比较Fig.9 Comparison of stable boundary of four methods
进一步进行时域仿真验证,在Ugf=0.373Ug时,图9 中点A(1 820,80)和点B(1 820,72)控制参数下的dδ/dt-δ仿真结果如附录B 图B3 所示,系统均保持暂态同步稳定。基于本文解析解,点A和点B的稳定判据Δ≤0 rad 成立,判定结果均为稳定;忽略阻尼的TEF/EAC 法会得到点A和点B对应参数失稳的错误结果;DRTEF 法会得到点A对应参数失稳和点B对应参数稳定的错误结果。
5 实验验证
为验证理论与仿真分析的准确性,本章进行硬件在环实验验证。实验平台如附录B 图B4 所示,主要由5 个部分组成:上位机(PC);数字信号处理器(DSP)(TI TMS320F28377D);连 接 器(DB37-G2);RT-LAB 实 验 平 台(OP5700);示 波 器(Tektronix MOS54)。其中,主电路搭建在RTLAB 平台中;控制部分搭建在DSP 中;RT-LAB 和DSP 通过连接器进行信息交换;PC 作为两台实验设备的上位机实现控制功能。
实验采用与仿真部分相同的系统参数,分别在以下工况中进行:运行工况1,Ugf=0.55Ug,控制参数如附录A 表A1;运行工况2 至4,Ugf=0.373Ug,控制参数分别对应图7 中b、e、a点;运行工况5 和6,Ugf=0.373Ug,控 制 参 数 分 别 对 应 图9 中A、B点。具体硬件在环实验结果如附录C 图C1 和图C2所示。
当Ugf=0.55Ug时,如 附 录C 图C1(a)所 示,输出电流ig经过振荡后恢复稳定且幅值有所增加,δ在故障发生后约1 s 由初始稳态值0.38 rad 到达新的稳态值0.74 rad,其稳态和动态情况与解析结果基本一致。图C1(b)和(c)表示Ugf=0.373Ug时,运行工况2 和3 对应的控制参数可以保证系统的暂态同步稳定,新的稳态功角值为1.44 rad。图C1(d)表明在运行工况4 所对应的控制参数下,δ发散,系统暂态同步失稳。图C2(a)和(b)对应工况下系统保持暂态同步稳定,证明本文所提方法相比忽略阻尼的TEF/EAC 法和DRTEF 法具有保守性更低的优势。实验结果验证了所提解析解、稳定边界和面向暂态同步稳定的控制参数设计方法的有效性。
6 结语
本文首先在传统EAC 的基础上考虑阻尼特性,从能量角度分析GFM-GCI 控制参数对暂态同步稳定性的影响机理。然后,借鉴多尺度法求解功角模型的显式解析解,基于解析解得到GFM-GCI 暂态同步稳定边界,并在此基础上给出了一种面向系统暂态同步稳定的控制参数设计方法。通过仿真与实验验证了本文理论分析、功角解析模型以及控制参数设计方法的有效性,具体结论如下:
1)基于考虑阻尼的EAC 揭示了控制参数对暂态同步稳定性产生影响的物理机制:增大阻尼参数D和减小惯量参数J有利于减小等效机械功率,进而减小系统加速面积,改善系统暂态同步稳定性。
2)基于多尺度法提出的功角解析模型能较为准确地反映大扰动故障下GFM-GCI 的功角稳态和动态特性。
3)基于解析解提出的控制参数设计方法,能有效指导暂态同步稳定下GFM-GCI 的控制参数设计,与现有传统暂态分析方法相比保守性更低,为GFM-GCI 控制参数设计提供新的理论支撑。
本文尚未分析多构网型逆变器并联系统中所提解析建模方法的有效性。在多机并联系统中会出现更复杂的暂态同步稳定问题,适用于多机并联系统暂态分析的解析模型是需要进一步研究的内容。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。