基于图像处理的电梯制动器监测方法研究
2023-08-09冯金奎于宗营吴占稳王小轮
冯金奎 于宗营 冯 云 李 兵 吴占稳 王小轮
(1.国家市场监管重点实验室(特种设备安全与节能),中国特种设备检测研究院 北京 100029)
(2.武汉理工大学 交通与物流工程学院 武汉 430070)
电梯作为建筑物内主要运输工具,已经成为人们日常生活中不可或缺的一部分[1]。据国家市场监督管理总局公开数据,中国电梯每天运送超过20 亿人次,电梯与公众日常工作、生活密切相关,直接关系人民群众人身和财产安全。中国电梯具有使用频率高、运行时间长、使用环境复杂等特点[2]。目前,我国运行15 年以上的老旧电梯已达73.68 万台,并以每年10%左右的速度增加,预计到2035 年可达860 万台[3],电梯逐年“老龄化”,并且已经集中进入故障多发期。
制动器是电梯不可或缺的重要安全装置之一[4],其主要功能是在电梯平层时,实现失电制动,确保乘梯人员安全上下电梯[5]。此外,制动器集上行超速保护、轿厢意外移动保护等多项安全功能为一体。电梯安全事故中多数是由于制动器失效而引起,发生严重问题时可造成重大的人身伤亡和财产损失[6]。为了减少电梯制动器故障、事故带来的人员伤亡事故,新出厂的电梯通过底层机电设计多数已具有制动器制动性能监测功能[7],但占据市场上绝大多数的老旧电梯难以按照新电梯的监测方法实现制动器制动性能的监测。
1 电梯制动器的常见型式
目前电梯常见的主机制动器分为鼓式制动器和盘式制动器。
1.1 电梯鼓式制动器
电梯鼓式制动器是以圆柱形的被制动部分的制动面作为特点,以圆柱形表面作为摩擦副接触面的制动器[8],其中鼓式制动器分为杠杆鼓式制动器和直压鼓式制动器。
杠杆鼓式制动器的被制动部件是制动轮圆柱面,制动元件是有导向的压缩弹簧,力是通过杠杆放大后作用于制动面上。
直压鼓式制动器的被制动部件是制动轮圆柱面,制动元件是有导向的压缩弹簧,力的作用方式是直接作用于制动轮外圆柱面。
1.2 电梯盘式制动器
盘式制动器是指用圆盘的端面作为摩擦副接触面的制动器[4],盘式制动器又分为钳盘式制动器和轴向盘式制动器。
钳盘式制动器的摩擦材料(制动衬)仅能覆盖制动面摩擦区域的一部分,且制动元件的作用力以钳夹的方式施加在制动面。
轴向盘式制动器的摩擦材料全部覆盖制动面摩擦区域,且制动元件的作用力以轴向推压的方式施加在制动面。
2 电梯制动器的运行保障现状
长期以来,电梯制动器产品定型阶段,由电梯型式试验机构在实验室内专业设备上完成制动器性能试验测试。电梯已安装于建筑物内的阶段,多是通过加载规定载荷或空载,通过轿厢制停距离间接实现制动器性能测试。但上述方法存在以下弊端:
1)定型阶段的测试方法不适用于已安装在建筑物内的电梯;
2)轿厢制停距离是曳引性能与制动性能的综合表现,直接用来表征制动器制动性能不科学,如制停距离过长有可能是制动性能低,也有可能是制动性能过高导致钢丝绳与曳引轮产生了过多的滑移;
3)需要搬运大量砝码,浪费人力,影响检验效率;
4)过多依赖检验人员经验去定性判断,存在误检、漏检的风险。
为此,有学者针对已安装于建筑物内的电梯提出了检测、监测的方法,常用方法是通过加装接触式传感器实现电梯制动器制动性能检测、监测,但加装传感器的方式多是通过改造电梯制动器(包括制动臂、闸瓦、弹簧、制动线圈等)、改变电梯控制电路甚至干预电梯安全回路等。电梯制动器是一个对稳定性能要求极高的关键部件,直接改造的方式无法估计对电梯安全性能的影响,存在巨大的责任风险。此外,改变电梯制动器、控制电路、安全回路等部件的状态可能还会面临电梯制造厂家验证、型式试验、监督检验、定期检验、功能安全认证等一系列环节,实际操作起来较困难,难以实际应用。因此,本研究提出了基于图像处理的电梯制动器监测方法,该方法是一种非接触式监测方法,监测过程中不改造电梯制动器、不改变电梯控制电路、不干预安全回路。
3 基于图像处理的电梯制动器监测基本原理
电梯制动器通常有打开和闭合2 种工作状态。电梯启动和停止过程中,制动器在闭合和打开2 种状态之间变换;电梯运行时,制动器保持打开状态。制动器的制动性能可以通过制动轮旋转的不同参数来表征,具体通过图像采集系统采集电梯不同工作状态下制动轮的图像,应用图像的傅里叶频谱分析、LSD 直线段检测等方法,综合确定图像的实际旋转角度,并根据角度与时间的关系以及历史数据判断制动器的运行状态。
3.1 二维离散傅里叶变换
二维离散傅里叶变换是将图像从空间域转换到频域的变换方法[9]。图像实质上是二维矩阵。将空间域的图像转换到频域能够更直观地观察和处理图像,也更有利于进行频域滤波等操作。
二维离散傅里叶变换公式见式(1)。式中f(x,y)代表一幅大小为M×N 的矩阵,F(u,ν)表示f(x,y)的傅里叶变换,可以转换为三角函数表示方法,其中u和ν 可用于确定正余弦的频率。利用式(2)和式(3)可以得到F(u,ν)的相位谱和功率谱。
式中:
Re,Im——分别表示取函数的实部和虚部运算。
3.2 图像的傅里叶频谱分析
根据图像的空间域和频域具有相映射的关系,图像经过傅里叶变换后再经过图像平移可获得具有纹理特征的频谱图,频谱图的中心明亮部分代表原图像的低频部分,频谱图的明亮直线可代表原图像的主纹理方向[10-11]。
图像旋转后,根据傅里叶变换公式(4)可获得傅里叶变换公式(5)。
图像旋转后其对应的功率谱P(u,ν)发生相对应的变化,由此可见,傅里叶变换对图像旋转敏感。多数图像经过傅里叶变换后,所生成的频谱图中都有亮度较高且过中心的1 条或多条直线,该频谱图为原图像的专属特征,且该直线与空间域中的边缘直线互相垂直。空间域的图像旋转后的特征会直接反映在傅里叶变换平移变化后的频谱图中,因此,可以利用图像傅里叶变换平移后的频谱图来检测图像的实际旋转角度[9]。
3.3 旋转角的计算
通常图像经傅里叶变换后的频谱图中会出现1 条或多条明亮的直线,若人工在图像中增加与背景色区别明显的线条,则频谱图通常仅会产生1 条明亮的直线垂直于线条直线边缘,则该直线的方向确定为图像的主方向。在同一圆形感兴趣区域(ROI)内,通过Matlab 软件将旋转前后的2 幅图像分别进行LSD 直线段检测,分别得到2 条直线的斜率K1和K2,通过式(6)求解直线的转向角θ,进而求出制动轮旋转角度时程。
4 基于图像处理的电梯制动器监测方法
基于图像处理的电梯制动器监测方法利用图像采集系统采集电梯制动器制动过程中的制动轮旋转图像,通过计算处理获得制动轮实际旋转角度,根据综合计算结果判断制动器性能变化情况。具体监测方法如下:
1)选择合适的位置固定图像采集系统,使镜头光轴尽可能与制动轮中心轴位于同一直线(见图1),减少制动轮成像过程带来的计算误差。

图1 现场实际测量电梯曳引主机
2)为避免非旋转图像引入频谱图误差,设置图像中的圆形感兴趣区域(ROI)(见图1 中红色圆圈),制动轮尽量覆盖图像采集系统视野中央,选择合适的帧率和画质,并使用直流光源补光。
3)从电梯启动开始采集图像,电梯稳定停止后,结束图像采集。
4)为更好地确定图像的主方向,模拟在制动轮上喷涂与背景色区别明显的线条,该图像经傅里叶变换后的频谱图仅会产生1 条明亮的直线,图像及其傅里叶频谱图见图2(a)、图2(b)。
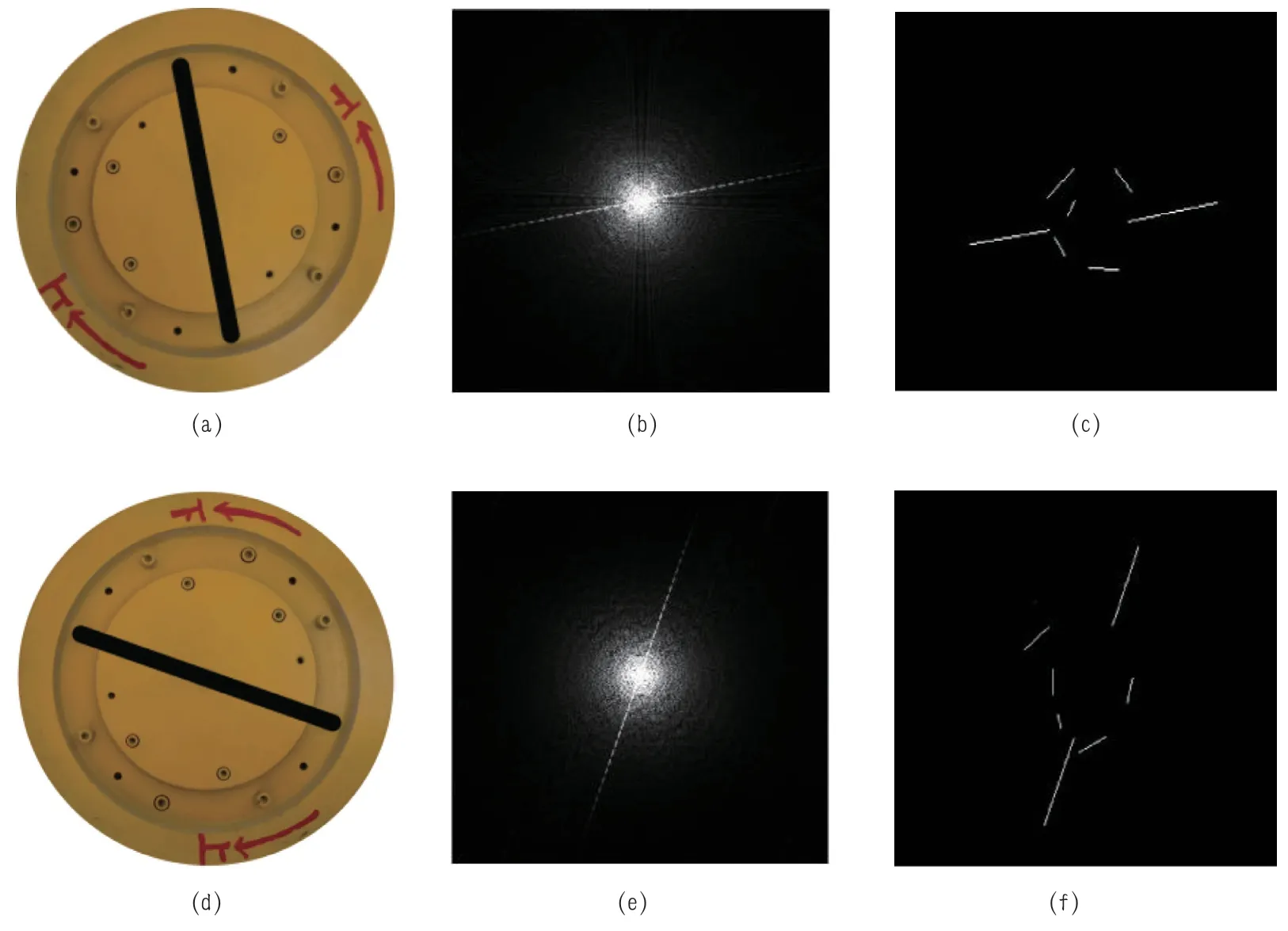
图2 旋转前后图像、傅里叶频谱图及LSD 直线段检测
5)将频谱图进行灰度处理,通过Matlab 软件进行LSD 直线段检测,见图2(c),根据直线的参数筛选出表示制动轮主方向的直线。根据连续帧图像中主方向直线的斜率计算求出旋转角度,最终确定制动轮随时间转动的情况。
6)通过累加不同时间段范围内的旋转角度,可求出相应阶段总的旋转角度。如电梯的正常运转—制动—停止过程中所有图片旋转角度依次相加,可获取电梯本次制动过程中制动轮的旋转角度,可用来表征本次的制停距离。随着监测电梯制动次数的增加,如制动过程中的旋转角度稳定在一定百分比阈值范围内则认为制停距离正常,反之则认为制动器制停距离异常,发出制停距离异常情况报警。
7)通过前述方法获得不同状态下制动轮的旋转角度情况,对旋转角度进行基于时间的一阶、二阶、三阶求导分别得到制动轮的角速度、角加速度、角变加速度。
8)通过制动轮角速度表征电梯运行速度,随着监测电梯运行次数的增加,如运行中的角速度稳定在一定百分比阈值范围内则认为运行速度正常,反之则认为运行速度异常,发出运行速度异常报警。
9)通过制动轮角加速度表征电梯启动加速度和制停减速度,随着监测电梯运行次数的增加,如制动轮角加速度稳定在一定百分比阈值范围内则认为电梯启动或制停正常,反之则认为电梯启动或制停异常,发出电梯运行加速度异常报警。
10)通过制动轮角变加速度表征电梯启动和制停过程的平稳性,随着监测电梯运行次数的增加,如制动轮角变加速度直线斜率稳定在一定百分比阈值范围内则认为电梯运行平稳,反之则认为电梯启动或制停异常,发出电梯启动或制动平稳性异常报警。
11)若出现连续报警且监测参数超出阈值范围较大百分比的情况,则可切断层站召唤装置电路,外部人员无法选层控制电梯,避免了电梯带病运行。
12)切断层站召唤装置电路,不属于改变电梯控制电路、接入安全电路等情况,按国家规定属于一般维修,由电梯维保人员进行施工即可,不需要进行监督检验、定期检验、功能安全认证等环节。
5 结果验证
为更好地验证所提出监测方法的有效性,本文开展了相关模拟实验。需要特别说明的是监测方法适用于前后2 张图片旋转小于180°的情况,因此,图像采集系统的采样频率至少高于2 倍主机旋转频率。为了便于实际测量曳引轮旋转角度以及图片主方向的确定,通过软件处理模拟在曳引轮上喷涂黑色直线进行标记,见图2(a)。通过软件精确设置喷涂后图片旋转60°,见图2(d)。将灰度化的图2(a)和图2(d)进行傅里叶变换分别得到图2(b)和图2(e),再通过LSD 直线段检测分别求图2(c)和图2(f)中主直线的斜率,计算求出旋转角度为59.599 0°,误差为0.67%。模拟实验结果表明了基于图像处理的制动器制动轮旋转情况监测方法的有效性。
6 结论
本文提出了一种基于图像处理的电梯制动器监测方法,通过图像采集系统采集电梯制动器制动过程中的制动轮旋转图像,应用图像的傅里叶频谱分析,依据频谱图与图像的纹理图像的对应关系,确定图像的实际旋转角度。判断制动轮角速度、角加速度、角变加速度,并对比历次数据判断分析制动情况。该方法不需要图像标定与手动特征识别,不需要坐标定位,也不需要测量曳引轮直径,仅需露出制动轮盘即可实现电梯制动器的监测,实现了非破坏性电梯制动器的监测,对提高电梯安全水平,预防和减少电梯事故具有重要意义。
