便携式多功能电梯乘运质量测量仪的研发及应用
2023-08-09陈建勋戚政武苏宇航杨宁祥刘德阳罗伟立
陈建勋 戚政武 苏宇航 杨宁祥 刘德阳 罗伟立 吴 溪
(1.广东省特种设备检测研究院珠海检测院 珠海 519002)
(2.珠海市安粤科技有限公司 珠海 519000)
加速度传感器在电梯检测领域已经获得了大量应用,结合不同的数据分析方法,可实现不同电梯参数的测量。例如:根据加速度数据在平均值附近的上下波动特性,可进行电梯振动舒适度分析[1];对加速度进行数字滤波和数值积分,可测量电梯速度、运行距离等参数[2];通过加速度信号频域分析,可分析设备运行时振动频率构成[3];对重力加速度在传感器3 个数据轴上的投影分量进行分析,可解算出倾斜角信息。现有的基于三轴加速度传感器的电梯检测仪器存在整机体积大、测量模式较单一、集成度不高、在线数据分析和在线报告导出能力不足等缺点,较难实现电梯现场多参数快速检测。微机电系统(Microelectromechanical Systems,简称MEMS)加速度传感器具有体积小、成本低、集成度高等优势,在位移检测[4]、自然灾害监测[5]、人体位姿监测[6]等领域已得到大量应用。目前,通过该类传感器可对垂直电梯振动舒适性进行检测[7],可测量轿厢姿态角、加速度[8]及制动参数[9],但开发的仪器或装置仅可实现单一或少数几种垂直电梯测试功能,也较少应用于自动扶梯或自动人行道振动舒适性和制动安全性检测。
噪声声级值是评估直梯、扶梯乘运质量优劣的重要参数[10-11],TSG T7001—2023《电梯监督检验和定期检验规则》也将噪声(包括机房噪声、轿厢内噪声、开关门噪声和无机房电梯层门处噪声)A 频率计权声级作为曳引驱动乘客电梯与载货电梯和曳引驱动消防员电梯监督检验的必检项目[12],电梯噪声防治得到越来越高的重视。轿厢内噪声、开关门噪声、无机房电梯层门处噪声需进行连续测量,机房噪声、扶梯运行噪声或扶梯环境噪声需进行点测。部分在售电梯乘运质量测量仪不具备噪声测量功能,或者虽配有噪声测量模块,但无法实现噪声声级数据连续采集和分析,噪声测量功能的集成度还不高,较难满足检测标准或规程要求。
本文通过合理设计加速度数据采集模块、噪声测量模块、手持式智能终端应用程序(App)和服务器端测量报告模板配置平台,并充分挖掘MEMS 加速度传感器应用效能,开发出便携式多功能电梯乘运质量测量仪,应用于垂直电梯、自动扶梯、自动人行道运动参数测量、振动舒适度评估、制动参数测量、机械部件失效分析、倾斜角测量等多个场合。重点对测量原理、仪器开发方法和仪器应用情况进行了详细介绍。
1 测量原理
1.1 电梯轿厢振动舒适度测量原理
电梯轿厢振动舒适度测量过程如图1 所示,加速度测量模块位于轿厢地板中央,模块X 轴和Y 轴为水平测量轴,Z 轴为竖直方向测量轴,其中X 轴垂直指向轿门。测量时操作者应距离加速度测量模块至少30 cm,以避免数据干扰。测量数据应包含轿门关闭、起动加速、匀速运行、停止减速、轿门开启的全过程。

图1 轿厢振动舒适度测量过程示意图
通过坐标变换对三轴加速度数据进行偏角修正[13],得到绝对水平和铅锤方向的加速度数据,见式(1)。
式中:
A0——获取的轿厢原始三轴加速度数据坐标向量,见式(2)。
A1——偏角修正后的三轴加速度数据坐标向量,见式(3)。
C——坐标变换矩阵,见式(4)。
矩阵C 中,α、β 和θ 分别为传感器X 轴、Y 轴和Z 轴与水平面的夹角。
获取的加速度数据减去重力加速度直流分量,以获得实际振动加速度,见式(5)。
式中:
A——X 轴和Y 轴处于水平位置时三轴实际加速度向量,见式(6)。
G——重力加速度修正向量,见式(7)。
g——重力加速度系数。
对三轴振动加速度进行频率计权,以使振动测试结果更符合人体乘梯舒适度感受,Wd频率计权适用于立姿水平向全身振动,Wk频率计权适用于立姿垂直向全身振动。振动频率计权可分解为高通、低通二阶巴特沃斯(Butterworth)滤波、a-ν 变换滤波、高阶滤波4 个数字滤波过程,总频率计权函数为上述4 个滤波器函数的乘积[14]。各滤波过程数字滤波器Z 变换的传递函数见式(8)。
式中:
H(z)——Z 变换输出值;
a——数字滤波器分子向量,见式(9)。
b——数字滤波器分母向量,见式(10)。
Z 向量见式(11)。
用滤波器向量a 和b 对第m 个加速度数据进行数字滤波时的递推计算,见式(12)。
式中:
x——滤波前数据序列;
y——滤波后数据序列;
m——滤波数据在序列中的编号。
依据GB/T 24474.1—2020《乘运质量测量 第1部分:电梯》计算出3 个测量轴在统计时间段内的所有峰峰值,按大小顺序排序,最大值为最大振动峰峰值,在排序后的数据中找出一个峰峰值,当序列中有95%的数据均小于该峰峰值,则该峰峰值为A95 振动峰峰值。
1.2 自动梯/道运载装置振动舒适度测量原理
自动扶梯梯级振动舒适度测量过程如图2 所示,扶梯正常运行时操作手持式智能终端采集三轴振动加速度数据,结束测试后由App 自动分析出测量结果。自动人行道踏板振动舒适度测量方法与自动扶梯类似。
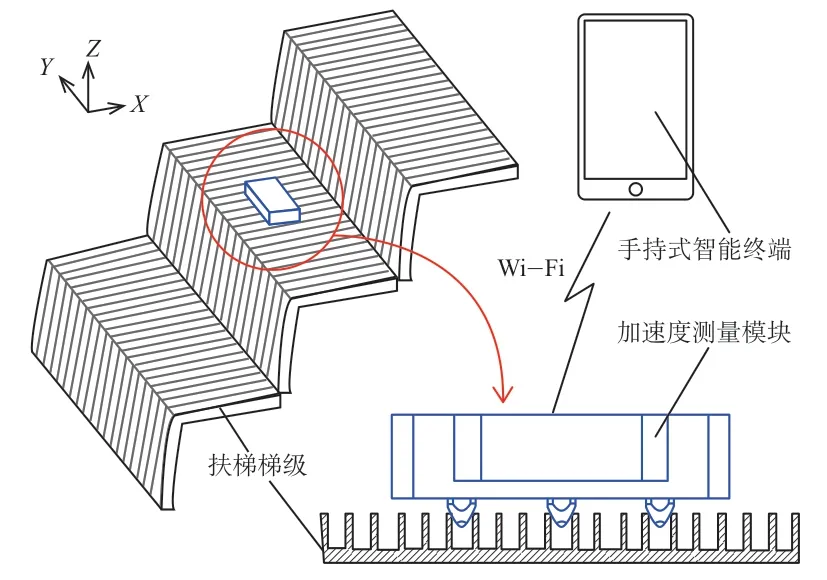
图2 自动扶梯梯级振动舒适度测量过程示意图
对于自动扶梯,采用与直梯轿厢乘运质量同样的数据分析方法得出梯级三轴振动加速度向量A,对于自动人行道,向量A 中的ax与踏板平面平行且指向下行方向,ax方向与踏板表面垂直。三轴加速度经Wd或Wk频率计权后,分别计算出振动均方根值(RMS值),计算窗口时间长度为1 s,以第N 个RMS 值计算为例,其计算方法见式(13)[11]。
通过计算出三轴RMS 值矢量和的平均值可对运载装置整体振动舒适度水平进行评估,矢量和计算方法见式(14)[11]。
式中:
axyz——三轴振动矢量和;
ax——X 轴振动RMS 值;
ay——Y 轴振动RMS 值;
az——Z 轴振动RMS 值。
1.3 自动梯/道扶手带振动舒适度测量原理
自动梯/道扶手带振动舒适度测量方法如图3 所示,手握加速度测量模块放置于扶手带上方,随梯运行,无论设备上行或下行,加速度测量模块的Y 轴始终指向下行方向。数据采集结束后仅需对扶手带下行方向振动加速度进行分析,将Y 轴和Z 轴振动加速度进行矢量分解和求和,得到扶手带运行方向振动加速度。扶手带手传振动采用Wh频率计权方式,随后根据式(13)计算出振动加速度RMS 值,计算窗口时间长度为1 s。
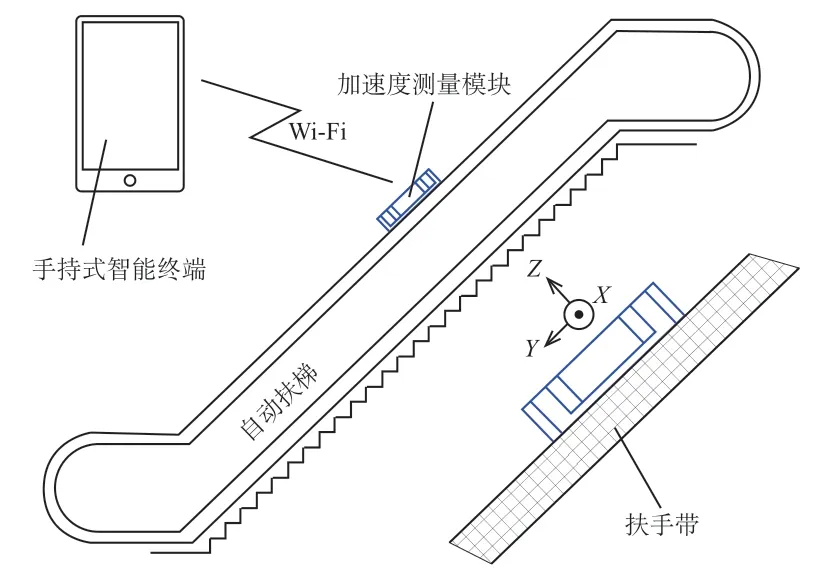
图3 自动梯/道扶手带振动舒适度测量示意图
1.4 直梯轿厢运行参数或制动参数测量原理
直梯轿厢运行参数主要包括最大加速度、最大减速度、A95 加速度、A95 减速度、最大速度、V95 速度、提升高度、最大加加速度等,测量时加速度测量模块放置方式如图1 所示。
对式(5)得到的Z 轴加速度数据进行二阶Butterworth 低通滤波,滤波截止频率为10 Hz。电梯起动时加速度数据的最大值为最大加速度,电梯制动过程加速度绝对值的最大值为最大减速度。先确定出电梯加速或减速过程中5%最大速度值和95%最大速度值之间的时间区间,在该区间内可分别统计出A95加速度值和A95 减速度值。取0.5 s 持续运行加速度数据区间的中点,对该区间数据进行线性拟合,计算出斜率作为该中点处加加速度值。
采用复化1/3 Simpson 方法对Butterworth 滤波后Z 轴加速度进行数值积分[2],可计算出运行速度,计算见式(15)。
式中:
ν(t)——t 时刻速度;
h——数据点的时间步长;
a(0)——初始时刻加速度;
a(t)——t 时刻加速度。
最大速度为电梯运行全周期范围内速度绝对值的最大值。加速阶段95%最大速度所在时间点的后1 s到减速阶段95%最大速度所在时间点的前1 s 的时间范围内可统计出V95 速度。
采用同样的方法进一步对速度进行数值积分可计算出位移,见式(16)。
式中:
s(t)——t 时刻位移;
ν(0)——初始时刻速度。
最大位移值即为轿厢提升高度。
直梯制动参数测量时加速度测量模块放置方式如图1 所示。首先需要找到低通滤波后Z 轴加速度绝对值的最大值,该值所在时间前后各5 s 可初步确定制动参数分析区间。根据式(15)得到的速度曲线零点和极值点对制动响应阶段、制动减速阶段和轿厢振荡阶段进行划分。分析速度数据得出制动响应开始时间、开始制动减速时间、制动结束时间。在此基础上查询位移曲线可得出制动响应阶段运行距离、制动距离、开始制动时轿厢位置等参数。
1.5 自动梯/道运行参数或制动参数测量原理
自动扶梯运行参数(主要是梯级运行速度)、制动参数测量时加速度测量模块放置方式如图2 所示。在扶梯或自动人行道停止时将加速度测量模块放置在与梳齿板最近的梯级或踏板中央,启动设备下行,当加速度测量模块位于倾斜段且运行速度稳定后执行制动操作,由App 自动计算出制动距离、制动时间、制动开始时梯级速度。
对于自动扶梯,由于X 轴和Z 轴并非指向梯级实际运行方向,需根据式(15)和式(16)分别计算出水平运行方向速度、位移及与梯级踏面垂直方向速度和位移,通过矢量和求解计算出梯级速度和位移。根据直梯轿厢制动参数同样的测量方法可计算出扶梯制动参数。计算自动人行道运行参数和制动参数与自动扶梯相比的不同之处在于,参与积分计算的加速度即为X 方向滤波后加速度。
1.6 倾斜角测量原理
根据加速度模块静止时重力加速度在3 个数据轴上的投影分量可分别计算出X 轴与水平面的夹角α、Y 轴与水平面的夹角β、Z 轴与重力方向的夹角γ,即为三轴倾斜角,其含义如图4 所示。加速度与倾角的关系见式(1)~式(4)。γ 反映了Z 轴的铅锤程度,值为0 表示Z 轴为铅锤方向且X 轴和Y 轴位于水平方向。γ 与θ 间的关系见式(17)。

图4 三轴倾斜角示意图
1.7 异常机械振动分析原理
通过快速傅里叶变换(Fast Fourier Transform,简称FFT)可计算出不同频率下的振动加速度幅值,分析频率谱曲线可得到振动的主要频率构成及各频率下的振动信号强弱,通过将故障设备的振动频率谱曲线与正常运行状态下频率谱曲线做对比可定位出设备异常机械振动源。
1.8 噪声测量及数据分析原理
电梯环境下噪声信号具有间歇、起伏或随时间不可预期变化的特征,需采用等效连续A 计权声级按时间平均方法来评价噪声对人体的影响,其实质上是用一个相同时间内声能与之相等的连续稳定A 声级来表示该段时间内的噪声大小。等效声压级计算方法见式(18)。
式中:
Leq——等效声压级,dB;
LAi——第i 次测得的瞬时A 计权声级,dB;
n——噪声值数据个数。
2 仪器研发
2.1 仪器组成
电梯乘运质量测量仪由加速度测量模块、噪声测量模块、手持式智能终端、报告模板配置服务器4 部分组成,硬件模块之间可进行Wi-Fi 无线通信。App安装于手持式智能终端,通过人机界面操作完成测量控制、数据显示、算法分析、结果展示、报告导出、数据分享等功能。加速度测量模块对振动测量准确性在±2%以内,分辨率为0.001 m/s2;噪声测量模块满足A 计权二级声级计要求,测量精度为1 dB。乘运质量测量仪外观见图5。
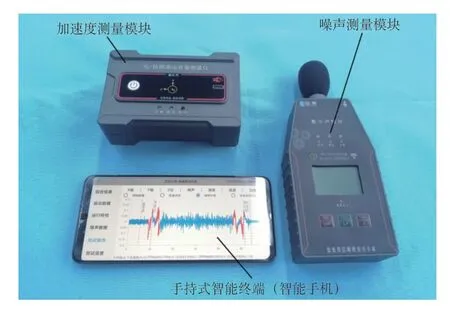
图5 乘运质量测量仪外观
2.2 硬件电路设计
加速度测量模块硬件架构如图6 所示,包括计算、控制、存储、通讯单元和供电单元2 部分。MEMS加速度传感器通过串行外设接口(Serial Peripheral Interface,简称SPI)通信方式将三轴加速度数据发送给单片机。测试数据临时存储于FLASH 芯片,经帧封装后通过高速Wi-Fi 模块发送到手持式智能终端。模块内置配重块,以确保测试时对放置面的压强不低于50 kPa,避免模块自身意外振动影响数据准确性。
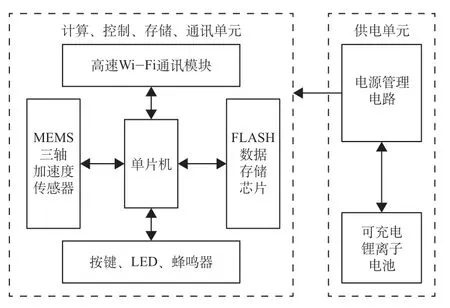
图6 加速度测量模块硬件架构图
噪声测量模块硬件架构与加速度测量模块类似,其传感器执行部件为声压传感器,声压模拟信号经专用噪声AD 转换芯片处理后供单片机读取,噪声测量模块可通过LCD 显示屏显示实时噪声A 计权声级数据。
2.3 模块结构设计
模块整体长120 mm、宽80 mm、高40 mm,通过改变底部3 个磁吸支脚设置形式可使加速度模块用于不同的电梯测试场景。3 个支脚呈三角形分布可用于直梯轿厢振动舒适度测试,见图7(a);调节2 个支脚的间距,使其与梯级面齿槽尺寸匹配,可对扶梯梯级振动参数或运动参数进行测试,见图7(b);移除底部3 个支脚,手握模块放置于扶手带表面,可对扶手带手传振动舒适度或扶手带速度进行测试,见图7(c);移除3 个支脚并将4 个磁吸座通过螺钉固定于模块底部4 个安装孔处,可使模块快速吸附于曳引主机外壳等铁磁性部件表面,对振动幅值或频率进行测量,见图7(d)。
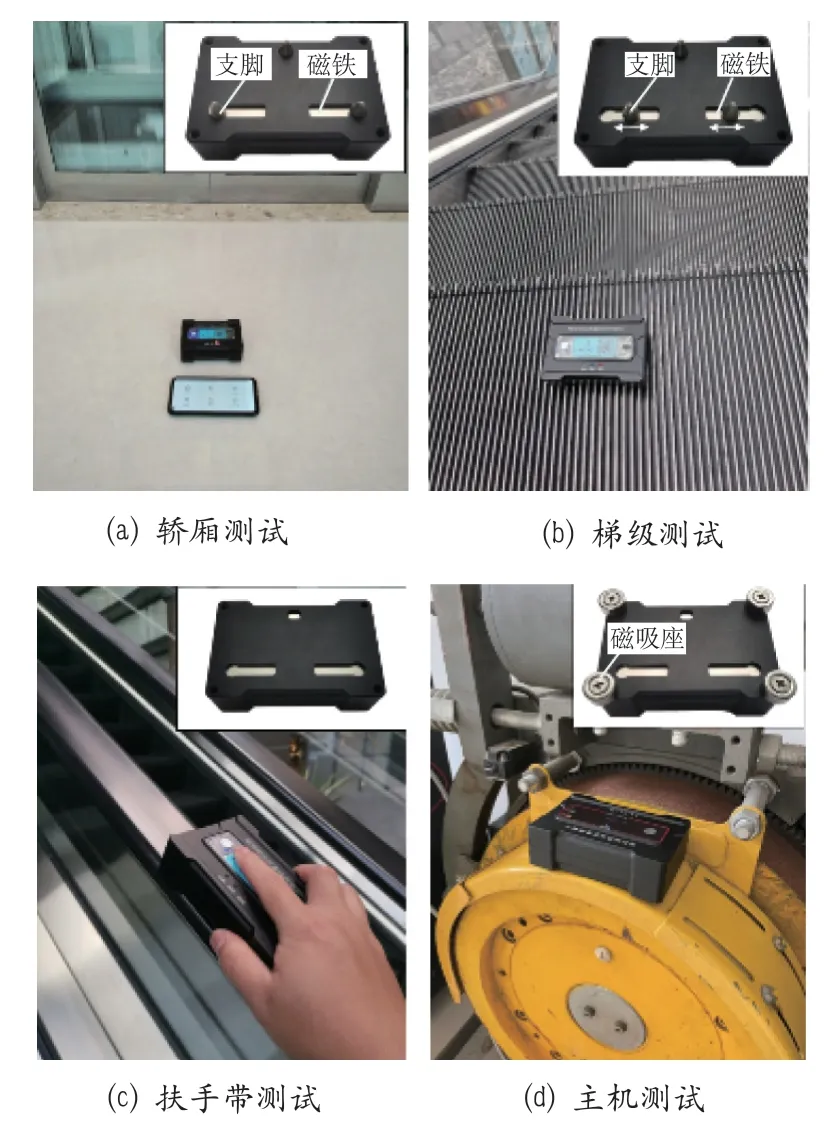
图7 不同测量场景下加速度测量模块支脚设置形式及放置方式
噪声测量模块可手持测试或固定于三角支架上测试,通过显示屏读取当前A 频率计权声级值,亦可通过Wi-Fi 连接App 进行噪声点测或连续测量。
2.4 App 设计
App 功能架构如图8 所示,包括直梯测试、扶梯测试、数据采集、数据导出、仪器校准、报告导出6 部分子功能模块。直梯测试模块包括直梯乘运质量(轿厢振动舒适度和噪声)测量、直梯运动参数(加速度、速度、位移、加加速度等)测量、直梯制动性能(制动距离、制动时间、平均制动减速度)测量3 部分。扶梯测试模块包括扶梯乘运质量(运载装置振动舒适度、扶手带振动舒适度、噪声)测量、扶梯制动性能(制动距离、制动时间、平均制动减速度、最大制动减速度)测量、倾斜角测量、扶梯速度(运载装置速度、扶手带速度)测量4 部分。数据采集模块可根据设置的采样速率、采样通道、采样时长进行三轴加速度和噪声数据采集,并进行滤波、频谱分析。数据导出功能以表格方式导出原始测量数据及算法处理后的结果数据,便于进一步拓展研究。仪器校准功能用于仪器出厂时快速配置加速度传感器和噪声模块标定系数。报告导出功能可实现测量结束后根据所选模板导出和分享直梯乘运质量、扶梯乘运质量、直梯制动性能、扶梯制动性能电子测试报告。
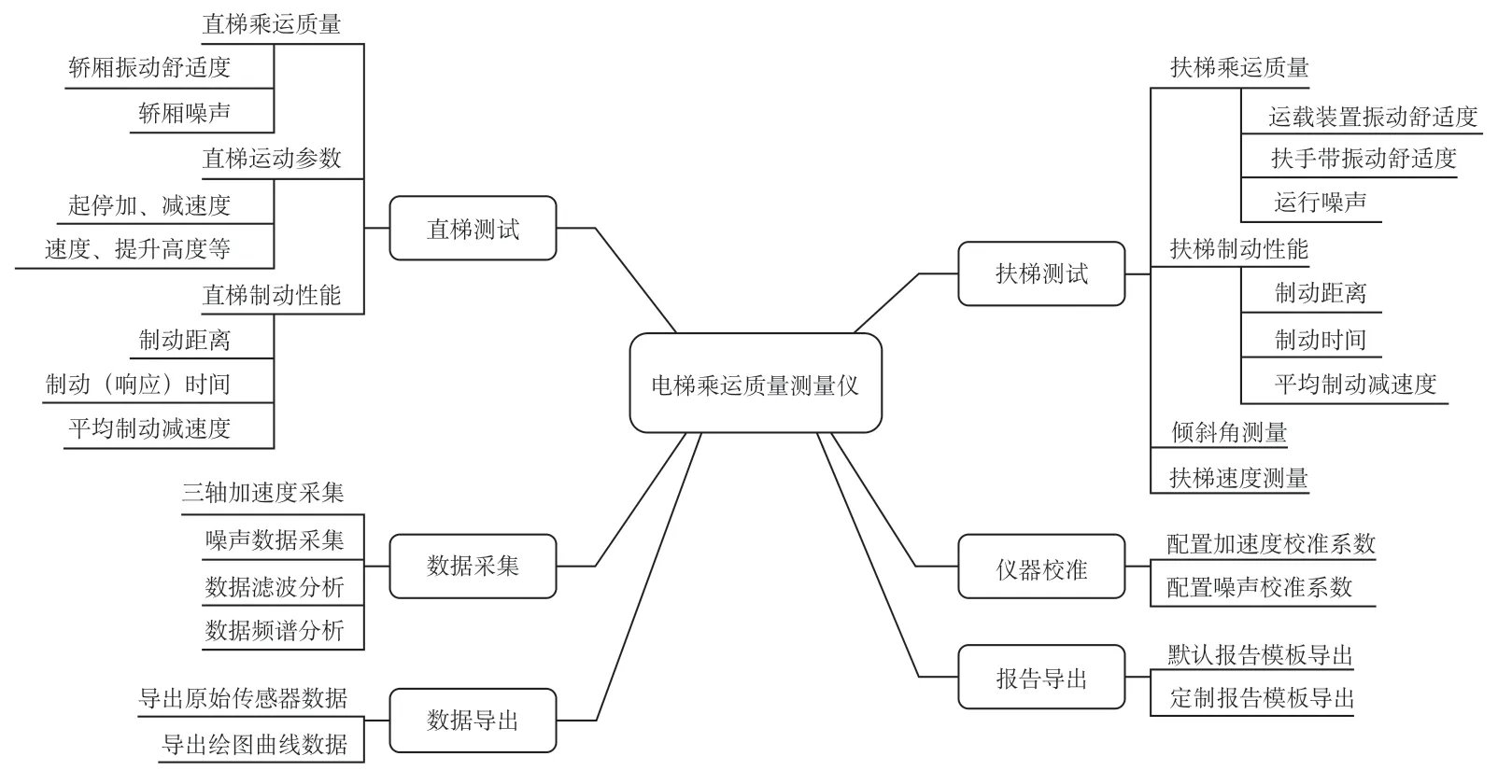
图8 App 功能架构图
2.5 服务器端设计
服务器端用于自定义配置测量报告和测量记录的“.doc”格式模板,可配置的常用测试模板主要包括:垂直电梯乘运质量上下行测量记录和报告、自动扶梯乘运质量上下行测量记录和报告、垂直电梯制动性能测量记录和报告、自动扶梯制动性能测量记录和报告。
3 应用实例
3.1 直梯乘运质量测量
加速度测量模块和噪声测量模块同时用于电梯乘运质量测量过程(见图9),手持噪声测量模块,使其位于轿厢地板上方1.5±0.1 m 处并指向轿门。操作App 完成测试开始和结束操作,测量过程中App 界面动态显示三轴加速度数据及当前A 计权声级数据。
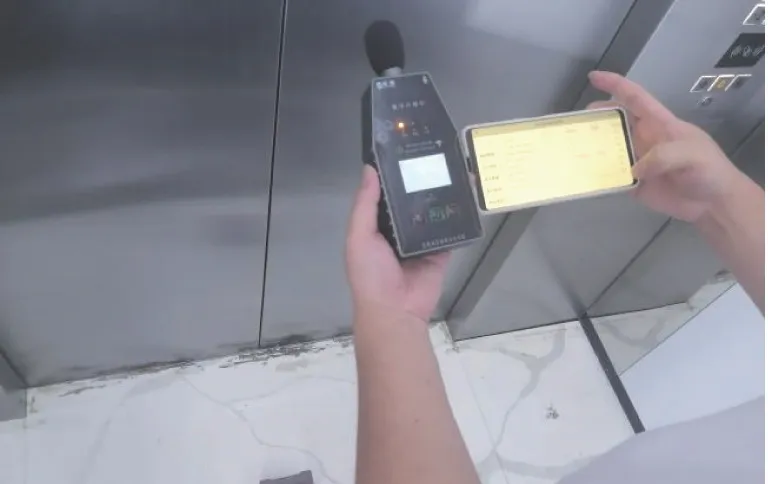
图9 电梯乘运质量测量过程
对应的乘运质量测量结果曲线分析界面如图10 所示,可对三轴原始振动加速度、低通滤波后振动加速度、频率计权后振动加速度、运行噪声、速度、位移、加加速度进行时域分析,并对原始振动加速度进行FFT分析。可对各轴最大振动峰峰值所在时间、位移、楼层位置进行定位。

图10 电梯乘运质量测量结果曲线界面
3.2 扶梯乘运质量测量
某扶梯上行乘运质量测量后App 历史记录中综合数据结果界面如图11 所示。该扶梯梯级振动舒适度和扶手带振动舒适度均符合要求,但最大运行噪声声压级达到81 dB,参考相关环境噪声不高于60 dB 的标准,该扶梯运行噪声不符合要求。

图11 扶梯乘运质量测量结果综合数据界面
3.3 电梯制动参数测量
对一垂直电梯125%额定载荷制动试验进行定量测量。模块放置后,操作电梯上行至顶层,随后起动下行,到行程中下部时按下急停开关实施制动,App自动分析出制动距离、平均制动减速度、制动时间等结果。制动参数测量结果分析界面如图12 所示,可知该梯在20 s 附近开始实施制动,手动分析模式用于人为通过曲线特征分析出制动起始时间和制动结束时间,实现制动参数的半自动分析。
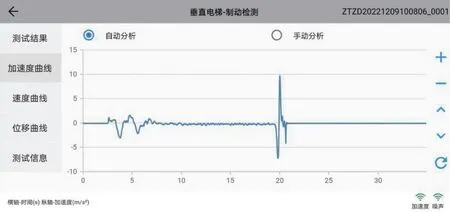
图12 电梯制动参数测量结果分析界面
3.4 扶梯制动参数测量
仪器对自动扶梯满载制动参数测量过程见图13,加速度测量模块按照图7(b)方式放置于梯级中间。将总制动载荷均匀分布在上部2/3 的可见梯级上进行试验,操作App 开始采集加速度数据,随后操作扶梯以正常速度下行,当三轴加速度模块随梯级运行至扶梯倾斜段且扶梯达到稳定运行速度时按下急停开关,停稳后结束测试,App 自动提取出制动减速过程,分别求解X 轴方向和Z 轴方向速度、位移,计算矢量和得到扶梯运行方向速度、位移曲线,得到制动距离、平均制动减速度、制动时间[15]。

图13 扶梯满载制动距离测量现场
3.5 扶梯倾斜角测量
按照图7(c)所示方式,将模块放置于扶手带上,使Y 轴指向扶手带运动方向,读取出Y 轴与水平面的夹角,即为扶梯或自动人行道倾斜角。对一扶梯倾斜角测量时App 界面如图14 所示,该扶梯倾斜角近似29.7°。

图14 扶梯倾斜角测量界面
3.6 振动频率测量
图15 为一台自动扶梯梯级振动分析结果,快速傅里叶变换的分析时间常数为16 s。所测梯级X 轴方向振动主频率为24.78 Hz,为电机旋转频率,50 Hz 附近振动峰值为电气系统工频振动频率。通过对设备同一位置振动频率组成进行定期测量和比较,可快速识别出异常振动频率峰值,与设备各部件固有频率进行比较可进行异常振动源定位。
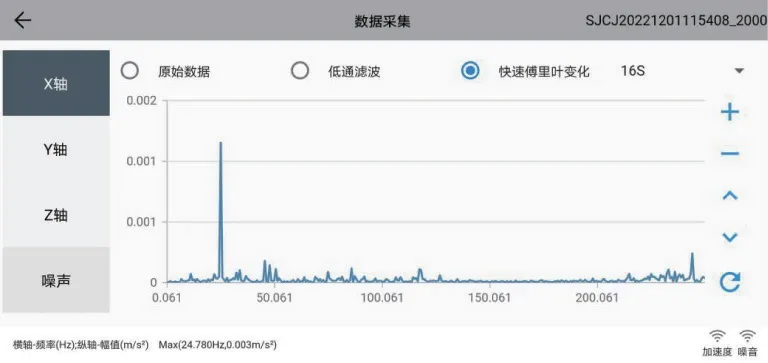
图15 曳引机振动频谱分析结果
3.7 机房或层门处噪声测量
TSG T7001—2023 中附件A1.3.14 要求:额定速度不超过2.5 m/s 的无机房电梯层门处噪声A 频率计权声级不得超过65 dB;额定速度大于2.5 m/s 的电梯噪声声级不应超过制造单位的允许值,如未规定则不应超过65 dB。对某无机房电梯层门处噪声测量过程见图16,噪声测量模块置于与驱动主机最近层门处且指向层门中部。测量时,噪声测量模块在水平方向距门扇 0.5 m 且垂直方向距层站地面 1.5 m 处测试,取出发端站门关闭后至到达端站门开启前,电梯全程上、下运行过程中以额定速度运行时的最大值。

图16 无机房电梯层门处噪声测量过程
4 仪器引用的标准和规范
乘运质量测量仪对直梯乘运质量和扶梯乘运质量的测量方法及数据处理过程应符合标准GB/T 24474.1—2020 和GB/T 24474.2—2020《乘 运质量测量 第2 部分:自动扶梯和自动人行道》的相关要求。振动加速度频率计权算法、仪器技术参数应符合GB/T 23716—2009《人体对振动的响应 测量仪器》的相关要求。仪器各功能模块测得的参数符合性判断依据见表1。
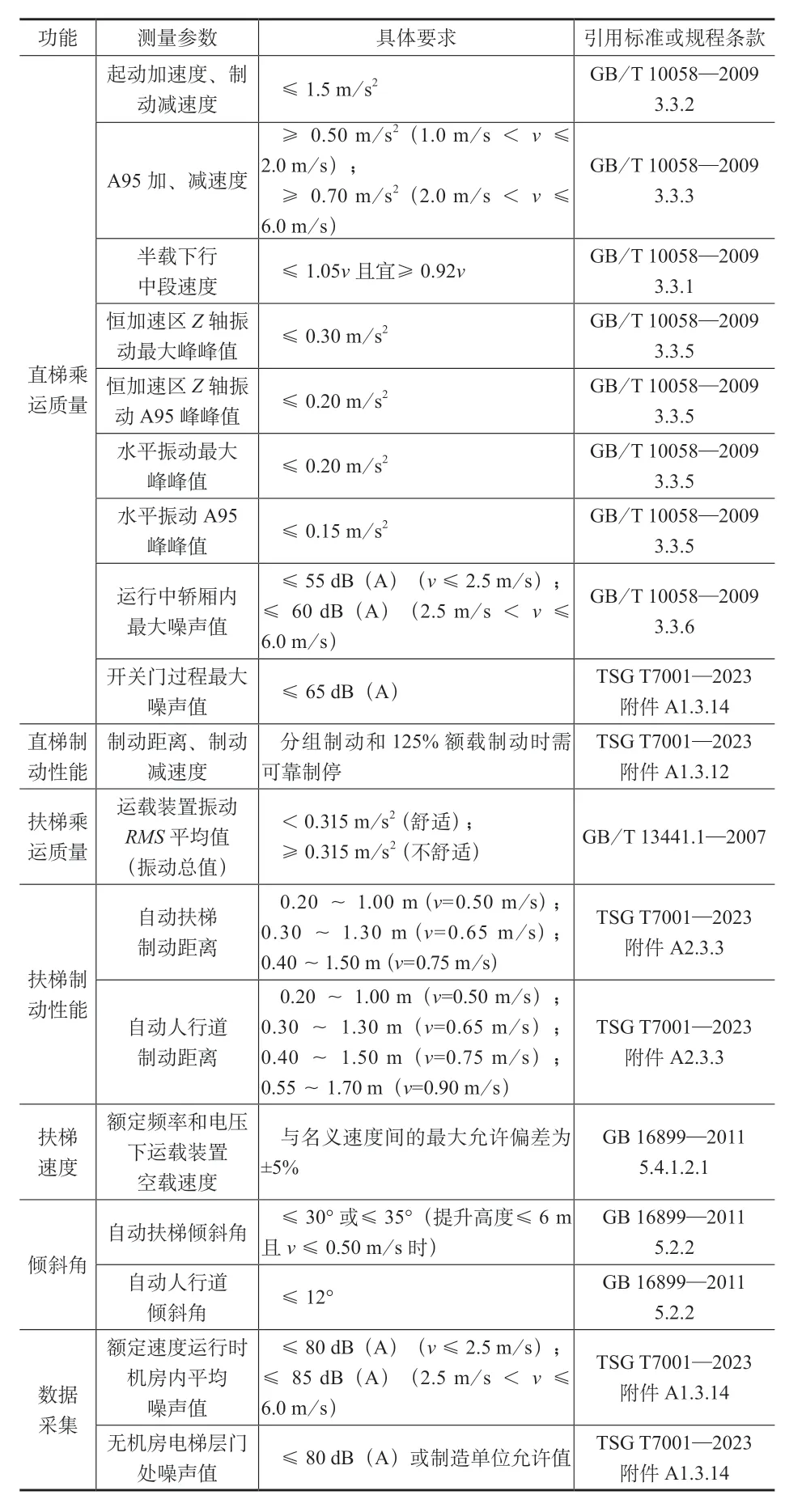
表1 测量结果符合性判断依据和引用标准、检规
5 总结
开发出便携式多功能电梯乘运质量测量仪,包括三轴加速度测量模块、噪声测量模块、手持式智能终端、报告模板配置服务器4 部分。仪器可对直梯运动参数、轿厢振动舒适度、扶梯梯级振动舒适度、扶手带手传振动舒适度、直梯/扶梯制动参数、机械部件振动频率、三维倾斜角等多个参数进行现场快速测量,测量过程操作简便、结构便携,可在现场快速完成电梯/扶梯乘运质量报告打印、盖章之前的数据采集、数据分析、结果符合性判断,极大地提高了测量效率。仪器已广泛应用于电梯/扶梯安装、维保、安全评估等多个场合,取得良好的社会效益和经济效益。
