KP458螺旋桨水动力及空泡特性研究
2023-08-03马如相汪鹏程
马如相,洪 亮,汪鹏程
(南京理工大学 能源与动力工程学院, 南京 210094)
0 引言
螺旋桨是广泛应用于船舶的推进装置。螺旋桨工作时周围不可避免地产生空泡。由于空泡对螺旋桨的水动力性能及噪声性能产生重大影响,因此螺旋桨空泡性能预报是螺旋桨设计和总体性能预报中不可或缺的重要环节。
空泡现象是由于流场中局部区域压降到低于该温度下饱和蒸汽压力,而导致爆发式汽化,水汽通过界面进入气核中,使其膨胀形成空泡。根据空泡的形态将空泡分为片状空泡、梢涡空泡、毂涡空泡3种。梢涡空泡是上述3种空泡中最早出现的,为抑制梢涡空泡的产生,需要能够精确捕捉梢涡空泡的数值计算模型。
螺旋桨空化作为国内螺旋桨水动力性能研究的热点问题,目前的研究方法主要采用实验测量与数值预报2种方式。由于实验测量的成本较高,并且随着计算机的性能更新迭代能够满足仿真需求,因此多数研究采用数值模拟方法进行螺旋桨空泡性能预报。
刘志华等[1]运用结构与非结构多块混合计算网格并结合RANS方程的方法对螺旋桨敞水性能进行了预报,结果表明该方法能够满足工程应用所需精度。胡健等[2]以船用螺旋桨(E779A)为对象,运用螺旋加密网格对螺旋桨尖端梢涡空化进行模拟,结果表明该方法具有良好的数值预报精度。刘芳远等[3]通过对梢涡区域的划分及网格加密,并基于均质混合流模型与Zwart-Gerber-Belamri空化模型对螺旋桨(PPTC)的空化流场进行数值模拟。齐江辉[4-5]采用Schnerr-Sauer空化模型及SST(Menter)k-ω湍流模型预报标准螺旋桨DTMB4381全湿流条件下的空泡性能,建立七叶大侧斜螺旋桨空化性能数值预报模型。冯雪梅等[6]基于多块结构化网格对标准螺旋桨(E779A与PPTC)进行均匀流场的空泡数值模拟研究。陈铠杰[7]通过开源平台OpenFOAM,采用RANS和DES两种不同的模拟方法并结合Schnerr-Sauer空化模型,对螺旋桨(PPTC)在全湿流和空化流条件下进行数值模拟。陈影[8]通过将螺旋管区域加密与依据气体体积分数的网格自适应技术相结合的新式网格划分策略,成功模拟出螺旋桨(PPTC)尾部的梢涡空泡。韩宝玉[9]采用经过旋转和曲率修正方法的代数应力湍流模型并结合改进型VOF(volume of fraction)模型,研究椭圆型水翼梢涡空化特性,准确模拟梢涡涡核内系统旋转和流线曲率影响,但是未对水翼的水动力进行定量校核,只是提出所谓消失空泡数的概念。刘登程[10]通过Schnerr-Sauer空化模型,研究网格类型和湍流模型对螺旋桨桨叶螺旋桨叶尖涡空化仿真结果的影响,并设计一种叶尖涡空化区域的局部网格密度优化方法,对螺旋桨(PPTC)进行全湿流和叶梢涡空化数值模拟。郑巢生[11]基于开源软件OpenFOAM构建适用于螺旋桨空泡的旋转坐标系下的空泡求解器,计算模拟均匀来流下螺旋桨(INSEAN E779A)空泡性能。刘恒[12]基于Schnerr-Sauer空化模型与两层湍流模型模拟非均匀来流条件下的PC456螺旋桨空泡形态,研究结果表明数值模型能够准确的仿真出空泡初生、发展、溃灭的全过程。吴利红[13]通过改变环境压力,研究MAU4-40小型桨空泡初生的临界速度以及空泡生成后的螺旋桨水动力性能曲线。
KP458螺旋桨作为常用的船舶推进设备,国内外对该型螺旋桨空泡及尾流场的研究相对较少,因此基于国内外螺旋桨空泡数值模拟的研究现状,本文中利用CFD软件Star-CCM+,采用Schnerr-Sauer空化模型及SST(Menter)湍流模型对VP1304螺旋桨的水动力及空泡性能进行预报,以此对四叶螺旋桨KP458的梢涡及尾流场特性展开详细的计算与分析。
1 物理模型
1.1 控制方程
控制方程包括连续性方程和动量守恒方程。由于不考虑流体的压缩性,将流体视为不可压缩流体,因此其控制方程为:
式中:μ为流体动力粘度;p为流体微元的压力;u、v、w分别为流体微元的速度分量;Fx、Fy、Fz为流体微元3个方向的质量力。
1.2 湍流模型
本文选择剪切应力输运模型SST模型(shear stress transport model)作为湍流模型。SST模型充分利用k-ω在近壁面的边界层区域湍流耗散小,收敛性好,以及k-ε在远场区域计算效率高,对复杂流场适应性更好,使得该模型的通用性强,其输运方程如下:
湍动能方程:
耗散率方程为:
式中:Gk表示湍流动能;Γk和Γω分别为k与ω的有效扩散项;ui为速度分量;Yk和Yω分别为k与ω的发散项;Dω为正交发散项;Sk和Sω为用户自定义的源项。
1.3 多相流模型
本文采用的是VOF多相流模型,VOF模型假定各种互不相容的流体相在同一个控制体内所有相的体积分数之和为1。第i相的体积分数αi的传输方程[14]为:
式中:sαi为i相的源点或汇点;Dρi/Dt为相的密度梯度;v为流体速度。
1.4 Schnerr-Sauer空化模型
计算汽液之间的质量变化需要设置能够描述两相之间关系的模型,即空化模型。Schnerr-Sauer空化模型是更具一般性的Rayleigh-Plesset(RP)方程的简化形式,其忽略了空泡增长加速的影响以及粘性效应和表面张力效应。由于工程实际应用中忽略流体粘性和表面张力产生的影响,因此Schnerr-Sauer空化模型能够满足绝大多数工程应用。
蒸汽相质量分数的输运方程如下:
式中:ρ为混合介质密度;Re为空化模型蒸发质量;Rc为空化模型凝结质量;αv为蒸汽的质量分数。
空化气泡增长速度控制方程:
式中:Psat为饱和蒸汽压力,对应于气泡表面处的温度;Pv为周围液体压力;ρv为流体密度。
关于螺旋桨的进速系数J、推力系数KT、扭矩系数KQ、敞水效率η及空泡数σn的定义如下:
2 数值方法验证
数值验证模型采用德国波兹坦(SVA)水池提供的VP1304螺旋桨几何模型,主要参数见SVA水池试验报告。本文对水下推进器国际会议SMP’11中发布的空化案例Case2.3.1[15-16]进行数值模拟,以此验证数值模型的可行性。VP1304标准桨模型如图1所示。主要参数见表1。

表1 VP1304螺旋桨主要参数

图1 VP1304螺旋桨几何
本文中将计算域设为与螺旋桨同轴的圆柱体,左侧为速度入口,右侧为压力出口,圆柱表面为对称平面,螺旋桨表面为壁面边界条件。避免壁面反射波对螺旋桨的流场造成影响,速度入口与压力出口边界应足够远,距离螺旋桨盘面中心分别为6D和13D,计算域直径为8D。同时为了有效地捕捉螺旋桨梢涡空化,将计算域划分为远场静止区域与近场旋转区域,均采用结构化网格,近场旋转域也设置为圆柱形,旋转域直径为1.5D,长度为2D,并且在梢涡区域生成直径为15 mm的螺旋管几何体,螺旋管从桨叶尖端延伸至整个旋转区域。为便于静止区域与旋转区域的数据传输精度提高,减少数据传递误差,因此在交界面两侧各生成网格尺寸完全一致的棱柱层网格。计算域尺寸及边界条件设置如图2所示。网格划分如图3所示。
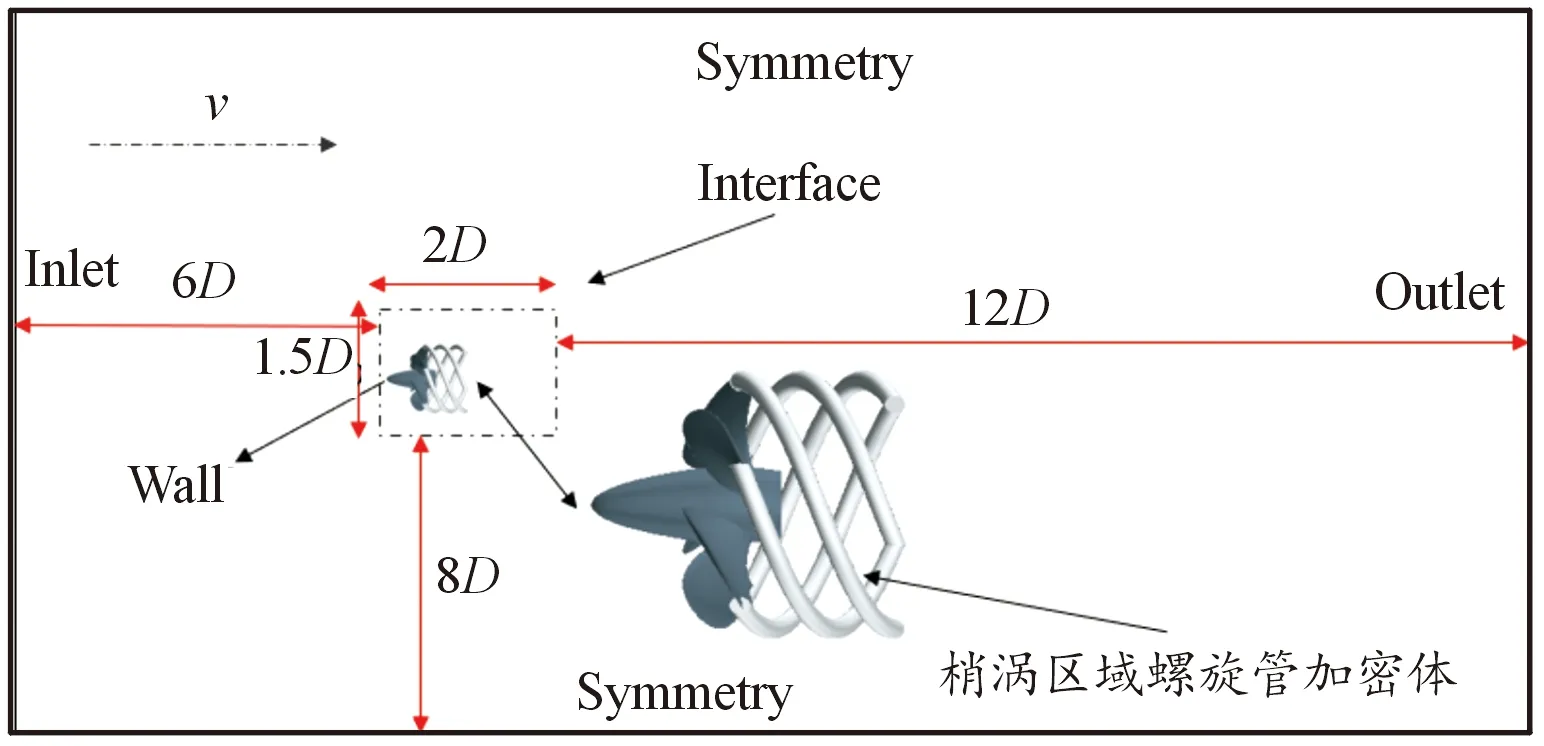
图2 计算域及边界条件设置示意图

图3 网格划分示意图
由于桨叶表面以及桨叶附近区域的网格数量对螺旋桨的计算结果产生影响,因此需要进行网格不确定度分析研究网格数量对螺旋桨空化性能计算的影响。本文中设计4套不同疏密程度的网格方案,即Mesh A(2.39×107)Mesh、B(4.97×107)、Mesh C (1.156×108)和Mesh D (2.876×108)。
本文中所采用网格划分均以基础网格参数H(0.1 m)为基本参数,边界层数为5,4套网格划分的具体参数如表2所示。

表2 3种网格参数对比Table 2 Comparison of three grid parameters
数值计算参数与试验工况相同,进速系数J=1.019,转速ns=20 r/s,饱和蒸汽压力Pv=2 350 Pa,得到的螺旋桨水动力系数如表3所示。从计算结果可以看出,随着网格数的增加,螺旋桨水动力系数计算结果与试验值的差距逐渐缩小,网格收敛性得到了验证。采用C方案的数值计算结果与试验值(KT=0.372 5,10KQ=0.991 5),空化情况的差别能够满足计算需要。

表3 KT、KQ与试验结果对比(无空化)
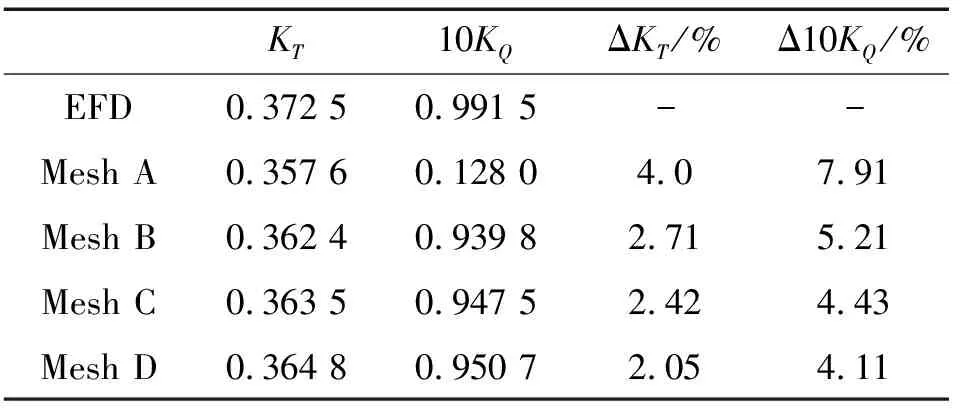
表4 KT、KQ与试验结果对比(有空化)
通常采用气相体积分数α(0<α≤1)的等值面来表示空泡形态。图4为空泡数σn=2.024时,3种网格下的空泡形态的计算结果(α=0.2)与试验结果(EFD)对比,图中蓝色区域代表空泡产生的位置。图4(a)为试验结果,如图4所示,B和C方案的空泡形态计算结果与试验值较为接近,具体细节存在差异,而A方案的空泡形态则与试验结果差距较大。综合考虑螺旋桨水动力系数及空泡形态预报结果,D方案的水动力系数及空泡形状与试验结果误差最小,考虑到计算精度与计算机效率,将C方案视为最优计算方案,后续进行KP458螺旋桨计算时仍然采用该尺度网格划分方法。

图4 不同网格方案模拟的空泡形态与试验比较(case2.3.1)
3 结果与讨论
3.1 无空化流场数值模拟
本文中选取的四叶螺旋桨为KP458桨,该桨为KVLCC2船模专用的螺旋桨,相关几何参数在表5中列出。KP458螺旋桨模型如图5所示。

表5 KP458螺旋桨主要参数

图5 KP458螺旋桨模型
为加快计算收敛速度及获得可靠的空化流场初始解,先对螺旋桨进行无空化情形计算,此时环境压力设置为1个大气压。在无空化情形下,KP458螺旋桨不同进速系数(0.1~0.75)下推力系数KT和扭矩系数KQ。图6所示为无空化条件下KP458螺旋桨水动力性能曲线,螺旋桨转速ns=20 r/min。

图6 KP458螺旋桨水动力性能曲线
3.2 空化流场数值模拟
3.2.1水动力性能
无空化流场计算稳定后,激活Euler多相流模型和空化模型,重新设置环境压力,使空泡数σn=2.024,从表6对比结果可以看出,由于空化的存在,导致螺旋桨推力系数及敞水效率减小,随着螺旋桨的进速系数增大螺旋桨的推力损失逐渐减小。
虽然旅游英语专业是较新的专业,但是随着旅游业的发展近年来学生规模扩展较快,为了保证调查效率及调查质量,笔者主要采用的是定量分析。

表6 计算结果与误差分析(空化及无空化工况)
图7给出了不同进速下螺旋桨桨叶表面的压力分布情况,”SS”表示吸力面:”PS”表示推力面。从图中能够看出,桨叶吸力面的压力明显小于推力面的压力,吸力面与推力面之间的压力差是螺旋桨产生推力的原因。进速系数较低时吸力面与推力面之间的压力差最大,此时产生的推力也相对较大:随着进速系数J增加,桨叶表面的压力相应减小,吸力面与推力面之间的压力差也相应减小,因此进速系数J越大,螺旋桨的负荷就会相应减轻。

图7 不同进速桨叶压力分布
3.2.2空泡特性分析
计算不同进速系数时,KP458螺旋桨桨叶表面空化情况如图8所示。可以看出在较小的进速系数范围内,KP458螺旋桨表面发生空化现象,空泡面积与空泡体积随着进速系数的增大而逐渐减小,见表7。在进重载工况下(即进速系数较低),螺旋桨叶梢附近产生梢涡空泡。

表7 KP458螺旋桨空化情况

图8 不同进速空泡情况(α=0.1)
3.2.3梢涡特性分析
计算得到不同进速系数(J=0.3、0.4、0.5)时的螺旋桨漩涡结构可视化采用Q准则(Q=1×103)的等值面表示,Q准则的定义如下所示:
式中:Ω2为转速率张量;S2为应变率张量。
如图9所示,本文采用的数值模型能够清晰地捕捉到螺旋形的梢涡与笔直的毂涡,并且桨毂涡的强度高于梢涡。螺旋桨桨叶附近的梢涡强度最强,梢涡强度随着轴向距离的增加而逐渐减弱,进速系数越小,梢涡沿着伴流场向下延伸的过程中梢涡发生相互融合的现象越早,这是由于重载情况下,螺旋桨桨叶剖面的攻角较大,尾部的梢涡融合速度较大。对比不同进速系数,随着进速系数的增大,梢涡与桨毂涡的强度逐渐减弱。

图9 同进速系数的涡结构
3.2.4流场特性分析

图10 X=0平面桨盘速度分布
图11为不同进速下桨后尾流场的速度分布,红框内为经过精细加密的梢涡截面,精细加密的梢涡能够更精确地显示出尾流场的涡强和速度分布情况。梢涡向桨后流场发展过程中会发生内缩现象,低进速情况下尤为明显,随着进速系数增加,这种收缩现象逐渐减弱。桨毂形成的毂涡随着进速系数的降低,速度增加,耗散区域变大,呈现出逐渐与梢涡相融合的现象。
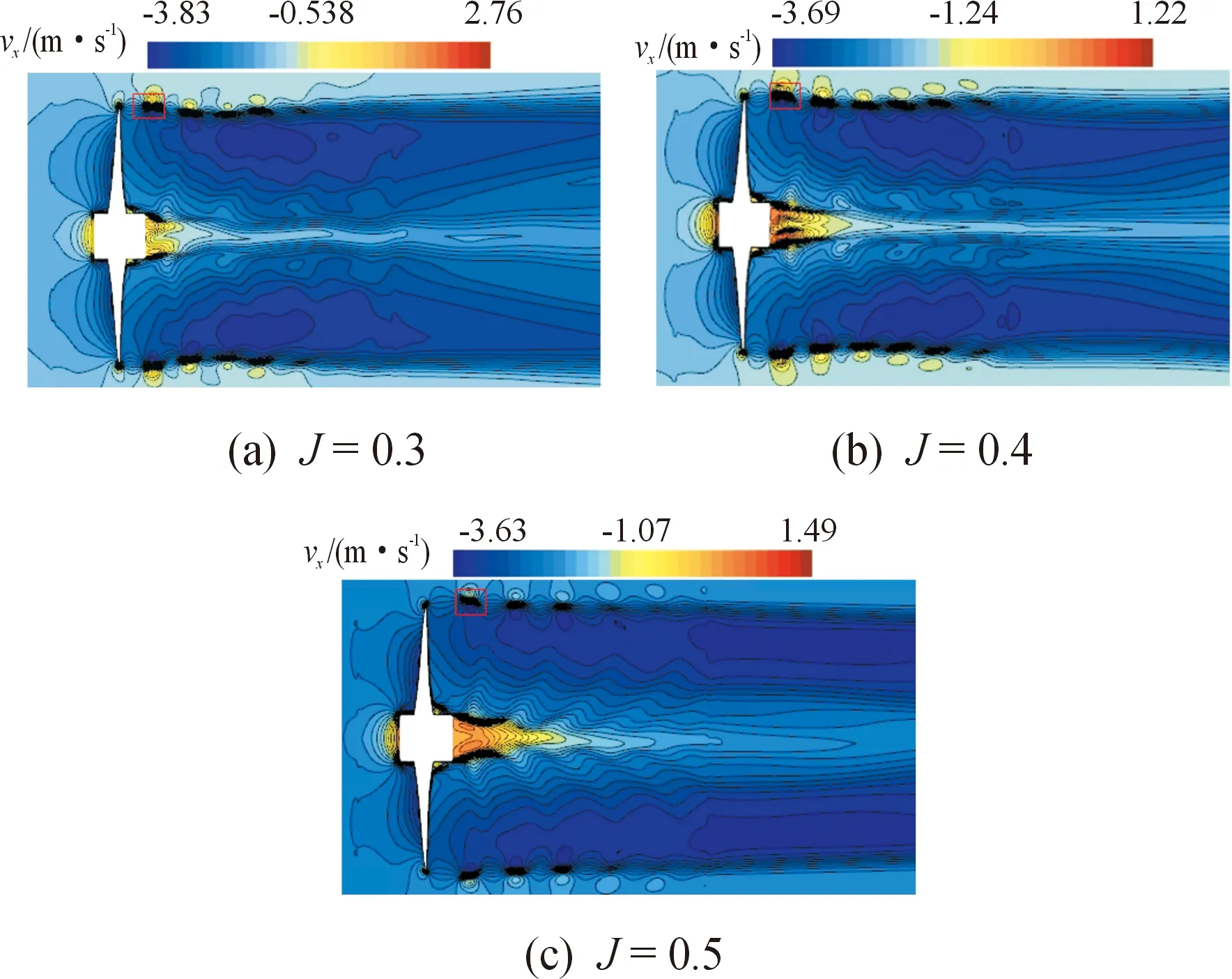
图11 Y=0平面流场速度分布
4 结论
本文基于梢涡区域螺旋加密方法,对轴向均匀来流条件下KP458螺旋桨水动力性能及空化特性等方面进行分析,得到以下结论:
1) 本文所建立的数值仿真模型具有较高的精度,能够准确的捕捉到螺旋桨产生的梢涡及梢涡空泡,无空泡状态下的定常计算结果作为空化流场的初始解,对螺旋桨的空泡性能预报准确有效。
2) 重载情况下KP458螺旋桨表面发生空化现象,并且空泡面积及体积随着进速系数的增大而逐渐减小。
3) KP458螺旋桨产生的梢涡向下然后的过程中会发生梢涡相互融合现象,随着进速系数的增大,梢涡融合现象得到延缓,梢涡强度逐渐减小。
4) 梢涡向后转递的过程中会发生梢涡内缩现象,随着进速系数增加,梢涡内缩现象逐渐减弱,且毂涡与梢涡融合的现象得到延缓。