履带车辆加速性性能泛函及数值求解
2023-08-03邹天刚毛飞鸿张金乐刘丽芳崔晓风
邹天刚,毛飞鸿,张金乐,李 博,吴 维,刘丽芳,崔晓风
(1.中国北方车辆研究所, 北京 100072;2.北京理工大学 机械与车辆学院车辆传动重点实验室, 北京 10081;3. 63963部队,北京 100072)
0 引言
履带车辆由于其高机动性和高通过能力,在地面作战以及特殊行驶路况发挥着至关重要的作用。加速性直接影响着履带车辆的战场生存能力和快速突击能力[1]。在发动机的参数确定后,良好的传动比参数是实现履带车辆优异加速性能的主要方法之一[2]。
在传统变速器传动比设计中,首先确定传动比阔度,再采用等比级差法或渐变级差法确定中间档位的传动比,难以充分发挥发动机性能[3]。汪润鸿等[4]采用混合粒子群算法,以驱动功率损失率和比油耗损失率为优化目标,优化传动比。郭谨玮等[5]以0~100 km/h加速时间和燃油经济性为优化目标,利用多目标粒子群算法求解最优传动比。胡文强[6]以原地起步加速时间和对应油耗为目标函数,以内点惩罚函数法求解最优传动比。Masoud等[7]结合遗传算法和整数线性规划优化无级变速器传动比从而改善发动机效率、减少排放。另外,还有一部分学者通过Isight、Cruise等软件建立车辆联合仿真模型和优化算法,从而优化车辆经济性或动力性[8-11]。
综上所述,大多数研究集中于建立车辆动力学模型或仿真模型,求解效率较低。另外,动力性的优化目标单一,没有同时考虑低速加速能力和高速加速能力的影响。
针对上述问题,搭建推进系统加速过程理论分析模型,以推进系统加速能力最优为设计指标,推导推进系统最短加速时间性能泛函的数学表征形式,使用遗传算法对性能泛函进行数值迭代求解,从而优化变速器速比参数。
1 车辆加速时间性能泛函构建
车辆的加速时间直接反映车辆的动力性能,为了直观表现履带车辆加速性能的强弱,构建以加速时间为指标的车辆加速性能泛函数学表征。
加速时半轴施加于驱动轮的转矩T1为:
式中:Ttq为发动机输出转矩;If为发动机旋转部件转动惯量;ηx为传动及行动系统效率;ωe为发动机转速;i0为主减速比或前传动与侧传动比之积;ig为传动装置变速比;
当传动系统理想无摩擦情况下,输出到驱动轮处的扭矩T2为:
所有摩擦阻力转化到主动轮处的摩擦阻力为:
式中:Tr为等效到驱动轮处的实际摩擦阻力转矩;r为主动轮半径;u为车辆行驶速度。
传动系中的摩擦损耗功率Pr为:
式中,i=i0ig。
车辆加速过程中,车辆总动能损失等于阻力损耗功率,从而得到:
式中:m为整车质量;Iw为车轮转动惯量;Ff为滚动阻力;Fw为空气阻力;Fi坡道阻力。
对式(5)化简后可得车辆加速度av数学表达式:
根据车辆加速度表达式av=dv/dt可知,车辆由车速u0加速到u1所需的时间T为加速度av的倒数对车速u的积分:
利用式(6)及行驶阻力表达式,得到加速时间T数学表达式为:
式中:Tdl为动力源输出力矩;f为滚动阻力系数;CD为空气阻力系数;A为迎风面积;β为坡度角。
将车辆加速时间T转换为性能泛函形式,从而将速比优化问题转化为性能泛函取极值的问题[12]。为简化性能泛函表征形式,同时考虑履带车辆在行驶过程中滚动阻力系数变化不大的情况,作如式(9)所示的变量代换:
若忽略换挡时的车速变化,近似认为换挡过程在一瞬间完成,此时只在有限的瞬间i发生突变,其他时间内i为恒定值,加速时间性能泛函为:
式中:uj1为升为j挡时的初始车速;uj2为升为j+1挡前的车速;ge为加速时所处的挡位数;ηTB为行动系统效率。
理论情况下,随着挡位数的增多,车辆在行驶过程中能够使车辆驱动力曲线愈加靠近理想驱动力曲线。但实际上,挡位数的增多会导致换挡次数的增加,而换挡次数增加会导致总换挡时间延长,考虑换挡次数的代价并简化性能泛函,认为每次换挡所需要的换挡时间τ为400 ms,从而得到有级变速履带车辆的加速时间性能泛函:
因此,有级变速履带车辆加速时间性能泛函被积函数表达式为:
2 性能泛函求解方法
1) 速比上边界条件的确定
我国国家军用标准要求军用越野车辆必须具备在30°以上坡道原地起步的能力[13],通常选取最大爬坡度βmax=32°。忽略空气阻力和加速阻力,从而得到履带车辆速比上边界计算公式:
式中:Ttmax为动力源最大转矩;βmax为最大爬坡度。
同时为避免履带车辆原地打滑现象,车辆驱动力不得大于路面最大附着力:
式中:φ为路面附着系数,选取φ=0.8;N为路面法向力。
2) 速比下边界条件的确定
履带车辆最高车速要求一般不低于75 km/h,从而得到速比下边界:
式中:vmax为设计的履带车辆最高车速指标;nEP为动力源最大功率输出转速。
3) 基于遗传算法的性能泛函求解
有级式变速器速比为逐级变化的非连续变量,无法得到连续的泛函极值时的速比曲线。故采用遗传算法对有级变速器加速时间性能泛函取极值时的速比条件进行计算,获得履带车辆最优加速性泛函宗量i的数值解,实现最优加速性能速比匹配设计。遗传算法的主要特点是不需要目标函数求导和连续性的约束,直接对遗传基因实现优化;同时可以实现并行性计算以及良好的全局搜索性能[14-15]。
采用遗传算法进行寻优计算时,其初始种群随机产生,为了避免出现积分后的加速时间或功率分配利用率向小于0的方向发展的情况,给定寻优时的驱动力约束,保证加速度不会出现负值:
γ1(u,i)=Ft(u,i)-Ff(u,i)-Fw(u,i)≥0
(16)
为保证路面具有充足的附着力,必须使得车辆驱动力不大于路面附着力:
γ2(u,i)=Ft(u,i)-φmg≤0
(17)
为了提升车辆的动力性能,对其相邻两挡级差不要求必须逐级递减,但为了保证换挡的正常进行,相邻级差约束在1.1倍,从而得到如下约束条件:
同时需保证速比逐级递减的基本结构要求,即:
γ4(ij)=ij>ij+1
(19)
除此之外,最大最小速比必须满足其上下边界的要求:
上述5类约束条件保证了车辆设计的基本性能要求及必须满足的物理条件。
由于表征履带车辆加速性能的重要指标为0~32 km/h加速时间,同时为提高履带车辆行车过程中40~60 km/h超车加速时间,对2个加速性能指标利用权重法进行动力性加权得到综合性能泛函作为适应度函数:
式中:F(i)为加速性综合目标函数;fu0-u1为u0-u1的加速时间;ζ1、ζ2为加速性权重系数,ζ1+ζ2=1。
3 结果与讨论
选取某履带车辆作为性能泛函速比优化的实例,车辆具体参数值如表1所示。
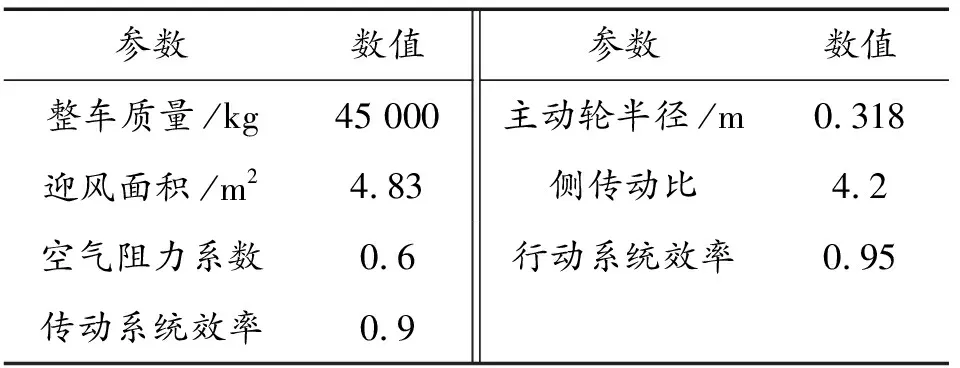
表1 车辆参数值
将参数代入式(14)和式(15)计算得到速比范围为8.16≤imax1≤11.24,imin1≤1.43。利用GAs+fmincon混合遗传算法计算不同加速性权重系数下的最优加速性速比设计,包括ζ1=1.0,ζ2=0时的0~32 km/h加速性能,ζ1=0.8,ζ2=0.2时的综合加速性能以及ζ1=0,ζ2=1时的40~60 km/h超车加速性能,得到优化前后的速比如表2所示。

表2 速比优化前后对比
不同动力性加权系数下,速比优化值不同。总的来说,当优化目标为40~60 km/h超车加速时间时,Ⅳ、Ⅴ、Ⅵ三挡趋向于变大,因为该车速下车辆主要位于该3个挡位,此时能够提供更大的驱动力,利于超车加速性能。当优化目标为0~32 km/h起步加速时间时,Ⅰ、Ⅱ、Ⅲ挡在兼顾级差等约束的前提下趋向于约束的极大值。
采用动力性换挡规律进行车辆仿真计算,得到优化前后加速性的对比分析曲线如图1所示。图1(b)为图1(a)的局部放大图。由图1可以看出,按照泛函优化之后得到的速比下,0~32 km/h加速时间由原来的6.34 s缩短为5.84 s,缩短了7.89%。但优化前后对于最高车速影响不大,说明在基本不改变车辆最高车速性能的前提下,对履带车辆0~32 km/h加速性能利用性能泛函优化设计是可行的。
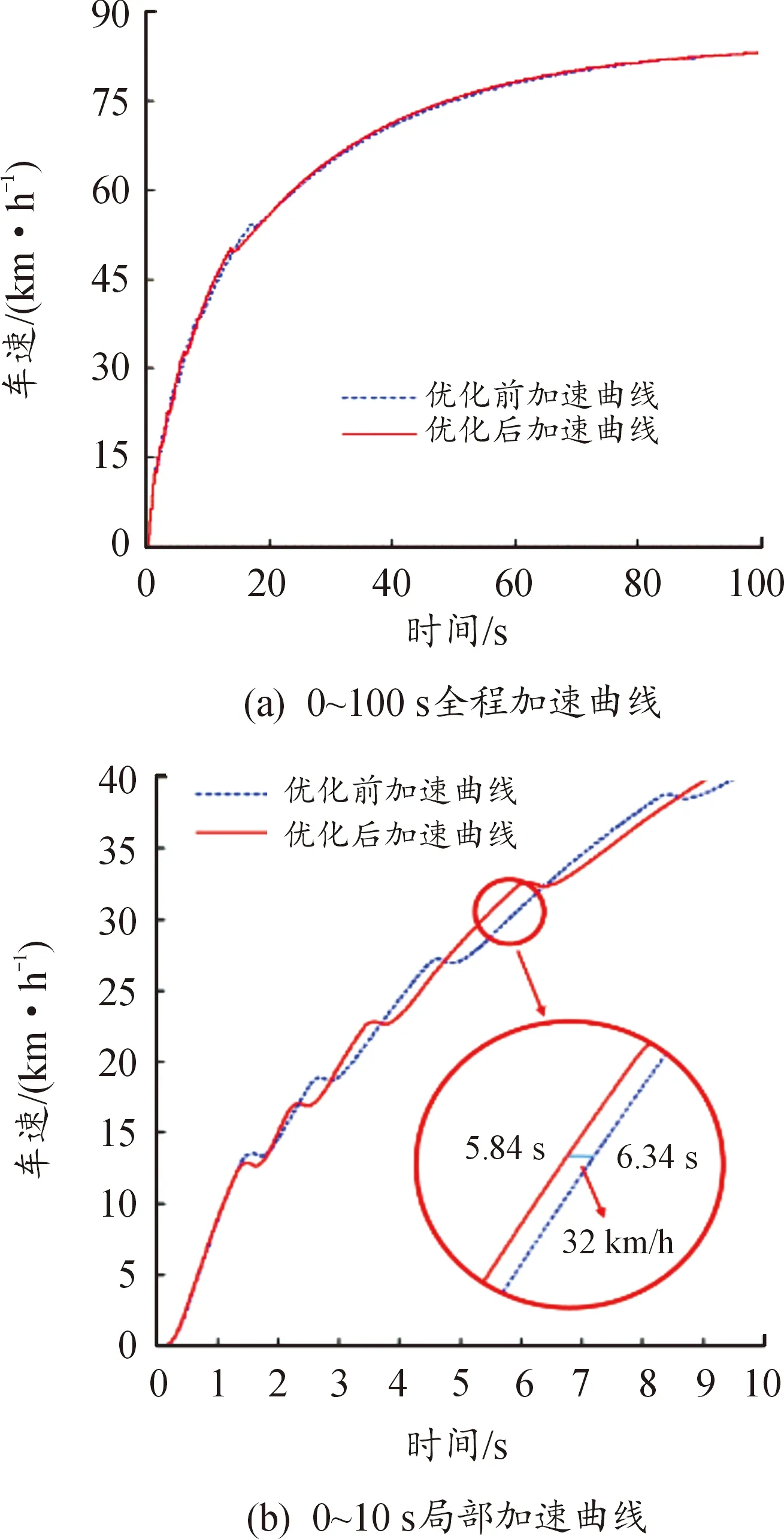
图1 优化前后加速曲线对比图
加速时挡位利用率表如表3,由表3可知优化前后各挡位在加速过程中的利用情况。0~32 km/h已经加速到Ⅳ挡,且优化后各挡位在加速过程中的利用率主要体现在Ⅲ、Ⅳ挡位的变化,Ⅰ、Ⅱ挡位利用率变化不明显。优化后Ⅲ挡加速利用率降低而Ⅳ挡加速利用率明显升高。根据a=du/dt对其基本原理进行阐述,车速增高后,du占比偏高且a由于挡位增大而减小,而在车速较低时,du占比较低且a较大,影响不显著。由表3看出,Ⅳ挡速比值的明显增加对于车辆0~32 km/h加速时间的缩短起到了关键作用。因此在不改变动力源输入及换挡次数的基础上,提高履带车辆加速性的关键在于对终止车速相邻2个挡位进行优化设计,尽可能使得在约束条件下增大该挡位的速比值。

表3 0~32 km/h加速时间挡位利用率表(%)
但需要注意的是车辆无法实现起步加速到任意车速全部时间最短,由于换挡时刻的不同及换挡降速现象的发生,优化前后的车速会出现交叉上升的现象。因此极值速比的选取与性能泛函的终止车速密切相关,需要在速比设计之初确定设计指标。
4 结论
将泛函分析理论引入有级变速器速比优化问题,推导得出有级变速车辆的加速性能泛函数学表征,并基于遗传算法进行数值求解,得到了性能泛函的最优加速性目标速比。主要结论如下:
1) 当优化目标为超车加速时间时,Ⅳ、Ⅴ、Ⅵ三挡趋向于变大;当优化目标为起步加速时间时,Ⅰ、Ⅱ、Ⅲ挡趋向于变大。
2) 优化后的速比能够有效提升车辆动力性能,0~32 km/h加速时间由6.34 s缩短为5.84 s。
3) 对终止车速相邻两个挡位进行优化设计能够有效提升车辆加速性。