集成GNSS 和加速度计的实时变形监测系统研制
2023-07-31王培源涂锐韩军强左航陶琳琳方婧
王培源,涂锐,3,韩军强,左航,陶琳琳,方婧
(1.中国科学院国家授时中心,西安 710600;2.中国科学院大学,北京 100049;3.中国科学院精密导航定位与定时技术重点实验室,西安 710600)
0 引言
全球卫星导航系统(GNSS)和加速度计(也称为强震仪)是获取高精度地表形变(位移、速度、加速度)的两种有效手段,对于自然灾害的监测和预警具有重要意义[1-3].加速度计是进行变形监测的常用方法之一,其体积小、采样率高、反应灵敏,通过对加速度积分可以得到速度和位移信息.但是,加速度计会受到基线漂移误差的影响,这些误差是仪器的倾斜旋转或环境变化引起[4-5].带有基线漂移的加速度值经过积分后得到的速度和位移会明显偏离真实的速度和位移[6].不少学者研究了加速度计基线漂移校正方法[7-9],这些方法通常需要外部信息作为参考或延长观测时间估计基线漂移,且恢复的位移结果仍然存在一定的偏移,很难应用于实时高精度变形监测.
对于GNSS 技术,实时精密单点定位(PPP)技术因定位精度高、单站作业、灵活方便,在收敛后可以达到厘米级甚至毫米级的精度等特点,非常适合进行变形监测.但是,相对于加速度计,GNSS 技术由于采样率的限制导致噪声水平比较高[4],只能获得高精度的低频位移信息,不能得到高频的速度和加速度信息,因此很难探测到微弱的地表形变.GNSS 和加速度计各有优势和局限性,它们的结合可以优势互补,对此已经有不少学者对二者的融合开展了研究.
目前对GNSS 和加速度计数据融合主要有两种方法.一种是松组合,Emore 等[10]提出了一种从GPS和加速度数据中获得最佳位移的方法,解决了加速度记录中的阶跃函数偏移.Smyth 等[11]提出一种多速率Kalman 滤波算法,从加速度和GPS 位移测量中估计速度和位移.Bock 等[12]将其应用于2 010 MW 7.2 El Mayor-Cucapah 地震的宽带位移估计,但是基线漂移不能被滤波器的动态噪声完全吸收,因此恢复的结果可能会有较大的偏移.Tu 等[13]使用实时动态(RTK)技术获取GNSS 位移与加速度数据并进行融合,估计校正了加速度计的基线漂移,同时也降低了GNSS 噪声,从而获得高精度的形变信息.Shu 等[14]提出基于历元间差分测速得到GPS 位移,并通过Kalman 滤波算法对GPS 位移和加速度数据进行融合.
另一种是紧组合,Geng 等[15-16]将GPS 原始观测值与加速度计数据融合,在两个历元之间用加速度数据对位移进行约束.Tu 等[17-19]提出了GNSS 和加速度计紧组合的方法,将加速度计的基线漂移作为未知参数引入,并通过随机游走过程进行估计,结果表明,加速度计基线漂移可以被自动校正,在实时获取形变位移的同时还提高了PPP 的收敛性和精度.
以上研究中,GNSS 数据和加速度数据都是利用两台仪器分别记录,这样就会存在时标及变形量不一致性的问题.针对这个问题,美国天宝公司设计了SG160-09[20],武汉大学和中国地震局合作研制了一体化GNSS 强震仪SMAG2000[21],都将GNSS 接收机和强震仪集成在一台设备上,Xin 等[22]对两台仪器的性能进行了比较.本文设计了一种将GNSS 接收机和加速度计集成一体的变形监测数据采集设备.基于集成设备采集的数据,采用Kalman 滤波算法对GNSS 数据和加速度计数据进行融合处理并通过实验验证了该系统可以实时得到高精度宽频带的位移、速度和加速度信息,实现了变形的实时监测应用.
1 数据采集设备设计方案
1.1 数据采集设备硬件设计
数据采集设备由单片机、GNSS 板卡、加速度计、4G 模块、电源模块构成.系统组成如图1 所示.

图1 数据采集设备结构框图
单片机使用意法半导体公司的STM32F103ZET6作为主控芯片,STM32 单片机拥有多个USART、SPI、IIC 接口,可以实现对外部传感器的数据采集.该芯片还拥有8 个定时器,其中高级定时器和通用定时器可以产生多路脉宽调制(PWM)输出,用于控制加速度计数据的采样率.GNSS 板卡使用和芯星通科技有限公司的全系统GNSS 高精度板卡UB4B0,可以输出NMEA、Unicore、RTCM 等多种数据格式的消息,本文设置输出RTCM3 格式数据.加速度计使用MuRata 的三轴加速度计SCA3300,有±1.5~±6 g的量程可供选择,SPI 数字接口.4G 模块使用塔石物联网提供的TAS-E18H,支持标准的AT 指令;支持自定义心跳包、注册包等功能;支持MQTT/TCP/UDP/HTTP 等多种协议;并且内置软件看门狗,支持断线重连技术.
1.2 数据采集设备程序设计
数据采集设备主要功能是将采集到的数据通过4G 模块发送至服务器.程序设计主要包括GNSS 数据和加速度数据的接收,GNSS 数据的解码,加速度数据编码,数据发送等几个模块.开机上电之后,先对串口、GNSS 板卡、加速度计进行初始化,如果接收到GNSS 数据,解码出GNSS 的MSM 电文中的时间;然后向加速度计发出命令得到加速度计数据,再将加速度数据编码为RTCM3 格式,编码时把GNSS对应的时间加一秒编进加速度数据中;最后通过4G 模块将编码后的加速度计数据和GNSS 数据发送至服务器.程序设计流程如图2 所示.

图2 数据采集设备程序设计流程图
1.3 RTCM3 数据的解码与编码
完整的RTCM3 格式数据由帧头、保留字、消息长度、可变长度消息内容和24 位CRC 校验码组成,帧结构如表1 所示.

表1 RTCM3 格式数据帧结构
解码的流程如图3 所示,接收到RTCM3 数据之后先判断帧头是否为“1 101 0011”,如果是提取消息长度n,判断消息缓冲区的字节数是否大于等于“n+3”,如果是说明字节数足够,可以进行CRC 校验,否则说明消息不完整应舍去.将计算得到的CRC 校验值与从电文中读到的CRC 校验值进行比较,若相同进入解码阶段,若不同则说明消息有误应舍去.编码是解码的逆过程.

图3 RTCM3 格式数据解码流程图
1.4 单片机与服务器的数据传输
4G 模块通过 AT 指令的配置可以直接将单片机串口发送的数据透传给服务器.4G 模块通过 TCP 透传连接服务器需要的AT 指令及其功能如表2 所示.
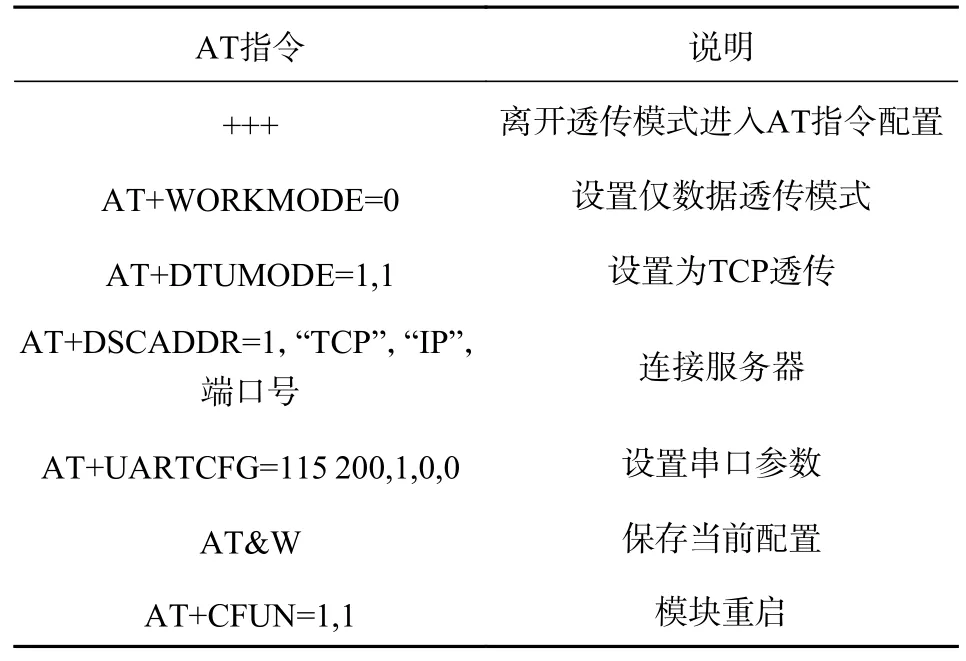
表2 4G 模块连接服务器需要的AT 指令及其功能
2 数据融合处理方法
2.1 松组合系统设计
本文采用Kalman 滤波算法对GNSS 数据和加速度数据进行融合.Kalman 滤波的状态向量xk为测站的三维位移dk、速度vk及加速度计的基线漂移uk,即
式中:下标k为历元;yk和ak分别为GNSS 位移和加速度的测量值;Hk为设计矩阵;I为3×3 单位阵;A为状态转移矩阵;B为加速度的输入矩阵;td和ta分别为GNSS 数据和加速度数据的采样间隔;αk和βk分别为位移噪声和系统噪声,且均服从正态分布;R和Q分别为位移噪声和系统噪声的协方差阵;r、qa、qu分别为GNSS 测量噪声方差、加速度方差、加速度计的基线漂移方差.
结合观测方程和状态方程,使用Kalman 滤波估计未知参数,包含预测(时间更新)和滤波(量测更新)两个部分.
状态一步预测方程:
式中,上标“-”和“+”分别表示时间更新和量测更新之后的值.
通常情况下,GNSS 数据的采样率远低于加速度计的采样率.当GNSS 位移和加速度的采样率不同时,双速Kalman 滤波可以使位移和速度达到最优估计[11].因此,只有加速度数据时只进行时间更新,有GNSS 位移数据时进行时间更新和量测更新,在两次量测更新之间的Kalman 滤波结果主要依靠加速度数据.
2.2 实现过程
GNSS 与加速度计松组合首先应把GNSS 观测值、状态空间表示(SSR)信息和加速度值进行时间匹配,若时间一致,利用PPP 解算得到测站位移.再将GNSS 和加速度计数据进行融合,得到融合后的位移、速度、基线漂移,用于实时变形监测.数据处理过程如图4 所示.
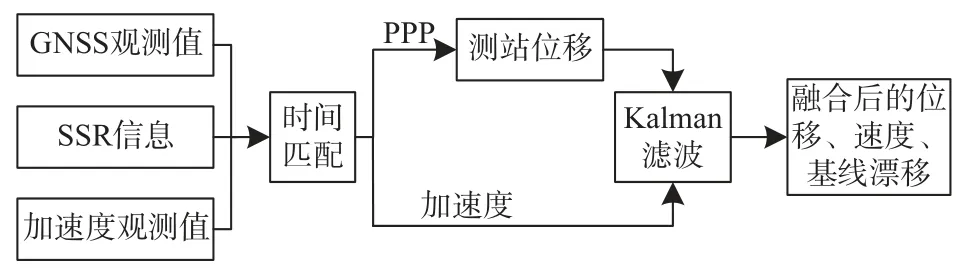
图4 GNSS 与加速度计松组合数据处理过程
3 实验分析
3.1 实验简介
本次实验在中国科学院国家授时中心临潼园区综合楼楼顶完成,楼顶视野开阔无遮挡物,观测条件较好.其中,多系统GNSS 的采样率为1 Hz,加速度计的采样率为50 Hz.为方便进行数据分析,本实验采用实时保存的原始数据及SSR 信息进行仿实时处理.实验装置如图5 所示.
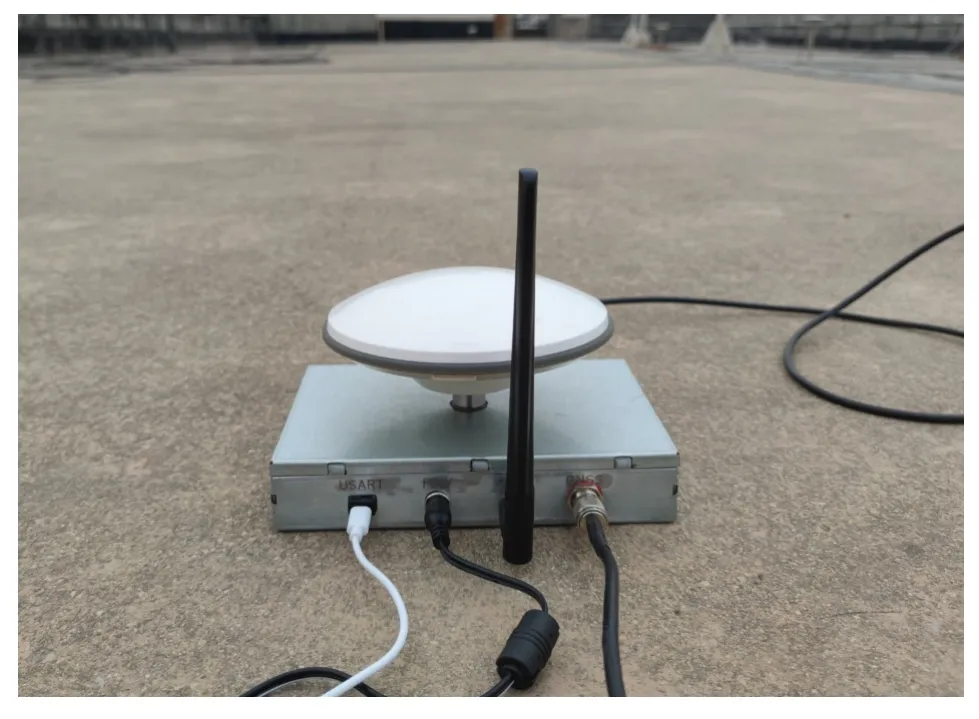
图5 实验装置
3.2 实验结果与分析
将仪器安装好后,取PPP 定位结果收敛之后的30 min 数据进行分析.图6(a)显示了原始加速度值(蓝色),加速度计的基线漂移(红色).由于仪器安装、环境变化及重力加速度的原因,原始加速度具有较大的初始基线偏移,三个方向的初始基线漂移分别约为0.128 6 m/s2、0.147 1 m/s2、9.760 2 m/s2.同时,这些基线漂移随着地面运动和环境变化而改变.原始加速度与加速度计的基线漂移作差即可得到校正后的加速度.图6(b)表示校正基线漂移后的加速度值.可以看出,当没有运动时,加速度值近似为零值.静止状态下原始加速度及校正基线漂移之后加速度的平均值和标准差(STD)如表3 所示.
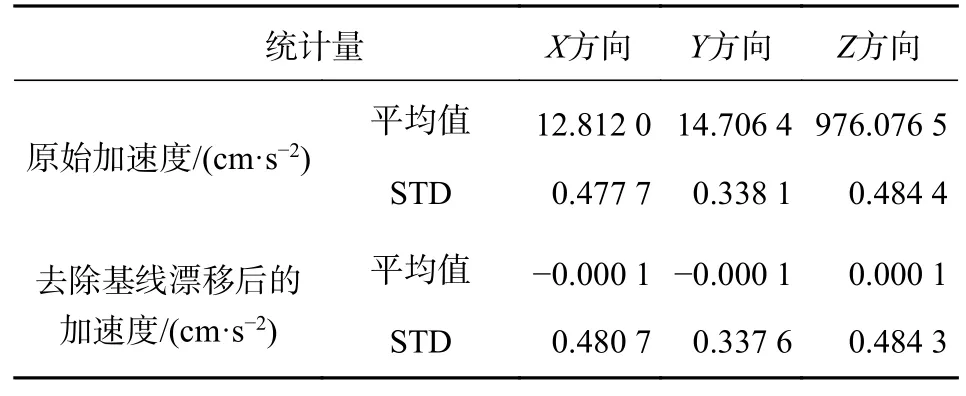
表3 静止状态下原始加速度及校正基线漂移之后加速度的平均值和STD
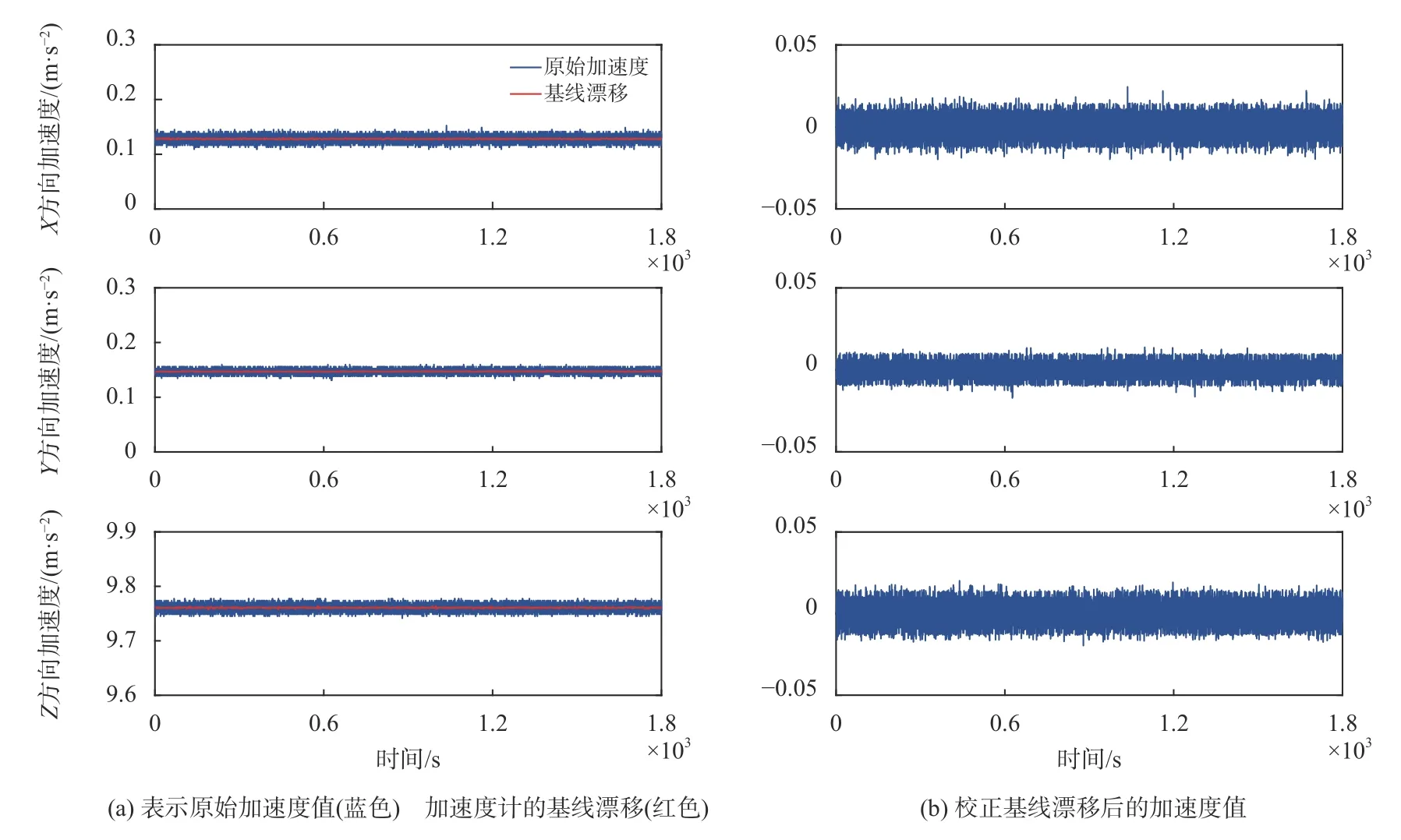
图6 不同方向原始速度及基线漂移加速度结果
GNSS 求解的三个方向的位移和速度如图7 所示.GNSS 与加速度数据融合之后求解的三个方向的位移和速度如图8 所示.表4 表示数据融合前后速度的平均值和STD.可见,GNSS 求解速度变化范围非常大,相比之下,融合了加速度数据之后的速度拥有更高的信噪比(SNR).三个方向融合之后的位移变化范围均在4.5 cm 以内,STD 分别为0.482 3 cm、1.113 3 cm、0.308 3 cm.
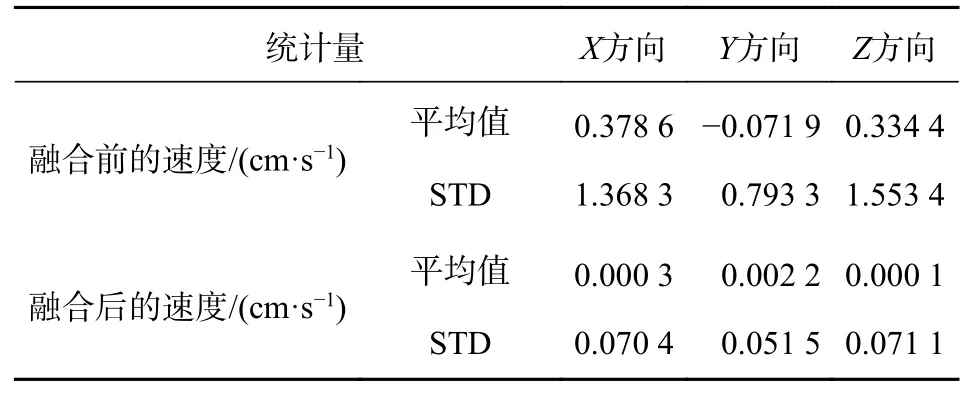
表4 数据融合前后速度的平均值和STD
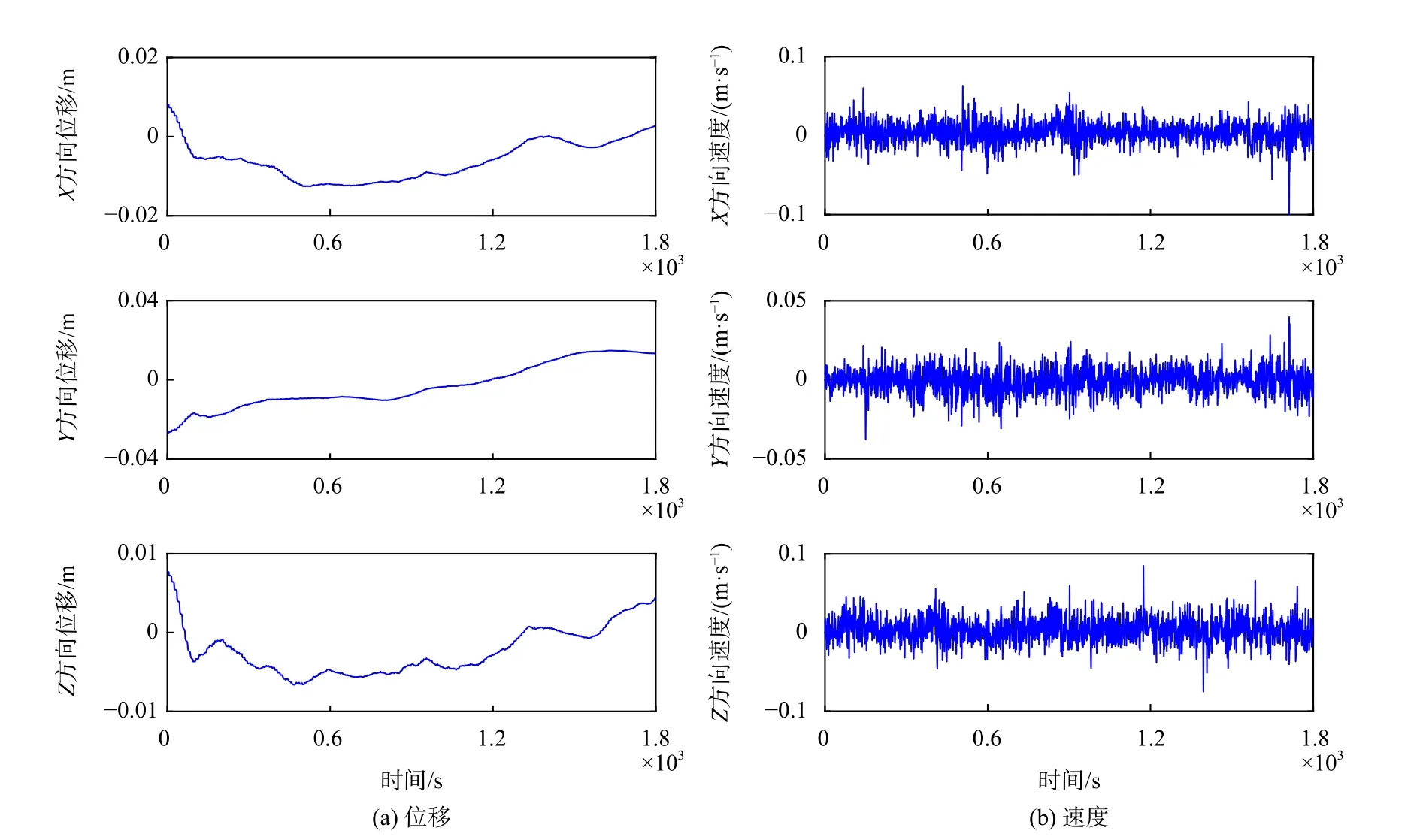
图7 GNSS 求解的三个方向的位移和速度

图8 GNSS 与加速度数据融合后求解的三个方向的位移和速度
4 结束语
本研究设计了一种基于STM32 单片机的GNSS数据和加速度计数据采集设备,并研发了GNSS 数据和加速度数据融合处理系统.在该监测系统中,使用PPP 技术得到高精度GNSS 位移,采用加速度计获取原始加速度,用Kalman 滤波算法对GNSS 位移和加速度数据进行融合,得到融合后的位移、速度和加速度计的基线漂移.
搭载了实验环境进行了实验验证,其结果表明,加速度计的基线漂移可以被自动校正,融合后X、Y、Z三个方向的位移STD 均优于1.114 cm,速度STD均优于0.072 cm/s,校正基线漂移后加速度STD 均优于0.485 cm/s2.本文的研究为实时高精度宽频带变形监测应用提供了技术支撑.
