基于BDS 的航空器追踪监控系统
2023-07-31毛新胜许欢潘路平
毛新胜,许欢,潘路平
(1.中电科航空电子有限公司,成都 611731;2.上海飞机设计研究院,上海 200135)
0 引言
航空器的追踪监控是指通过技术手段获取航空器的位置、高度、速度等参数,并将获取的数据信息不间断传输到地面,确保管理部门和航空公司及时掌握航空器的飞行状态与动向,实现对风险进行及时有效的识别、预警、缓解和消除[1].在紧急情况下,搜救等应急单位可以及时获得准确事故地点等信息,做出相应部署.实现航空器全球范围内全时的追踪监控,在保障航空运行安全、遇险搜救和飞行事故调查等方面都具有重要意义.传统的航空器追踪监控主要是通过飞机通信寻址与报告系统(ACARS)、广播式自动相关监视系统(ADS-B)等地基空地数据传输系统实现,位置源信息通常来自机载GPS,飞机下传数据的接收依赖于地面布设的通信设施.受限于地面站的部署,传统的追踪监控手段难以实现全球无缝覆盖[2].
2014 年3 月MH370 失联后,国际航空运输协会(IATA)组织成立航空器追踪任务组,旨在研究使用现有技术在短期内解决航空器的追踪问题.国内学者也提出了利用北斗卫星导航系统(BDS)功能实现航行追踪及遇险救援的方案[3].随后,国际民航组织(ICAO)协调各成员国及全球业界开始系统推进航空器追踪监控工作.2015 年11 月,ICAO 理事会通过了《国际民航公约》附件6 第I 部分的第39 次修订,制定了例行航空器追踪规范,并强制要求航空承运人实现对其海洋区域运行至少每15 min 通过自动报告对航空器位置进行追踪[4].中国民航局2016 年发布了《航空承运人航空器追踪监控实施指南》,随后在2017 年7 月发布了《中国民航航空器追踪监控体系建设实施路线图》,路线图中指出,到2025 年底要建成基于自主知识产权的航空器全球追踪监控系统,并形成相关标准[5].2018 年7 月,中国民航局联合中国国航、中国民航大学、北京飞机工程维修有限公司启动了基于BDS 的运输航空示范应用项目,推动以北斗为代表的自主装备在中国民航的应用,开启了基于BDS 的航空器追踪监控在中国民航的首次应用.2019 年12 月,中国民航局发布的《中国民航北斗卫星导航系统应用实施路线图》明确指出[6],推动以“北斗”为代表的国产装备在民航的应用,积极推进自主知识产权技术和标准在国际上的应用与引领.因此,建立以BDS 定位信息为核心的航空器追踪监控能力,推动基于BDS 的航空器追踪监控应用,对实现我国自主可控的航空器追踪监控系统具有重要意义.
基于中国民航航空器追踪监控应用需求,以北斗短报文通信方式为基础,设计了一套完整可用于航空器全球追踪监控的系统解决方案.该方案通过在飞机上加装符合中国民航发布的技术标准规定的机载BDS 设备[6-7],将航空器BDS 位置、地球表面运动速度和通过机载总线获取的GPS 位置、飞机燃油量等信息按照设计的通信协议通过BDS 短报文功能传输到地面数据处理中心,然后通过地面网络分发给最终用户,实现以BDS 位置信息为核心的航空器追踪监控应用,所设计的协议具有良好的灵活性,兼容北斗二号(BDS-2)区域短报文、北斗三号(BDS-3)区域短报文和全球短报文通信方式.
1 基于BDS 的航空器追踪监控应用
1.1 航空器追踪监控应用场景与需求
航空器追踪监控应用需求主要源自中国民航适航规章、标准规范要求以及航空承运人日常运行监控对飞机相关信息和机载系统参数监控需求.主要涉及文件包括:《大型飞机公共航空运输承运人运行合格审定规则》(CCAR-121-R7 条国内定期载客运行的运行控制责任、第121.533 条飞机追踪、第121.555条飞行中燃油管理等条款)和《航空承运人航空器追踪监控实施指南》AC-121-FS-2016-127.主要应用场景即是航空承运人、监管方对于航空器位置追踪和航空器运行过程中重要参数信息的实时监控,包括:正常航班例行追踪、燃油监控、计划路线与实际飞行路线对比、计划飞行剖面与实际飞行剖面对比、飞行动态监控、异常机动监控等.为确保飞机运行过程中运行信息被及时接收,飞机与地面监控系统之间的信息交互需要满足监控频次间隔不超过15 min,实际应用中通常监控频次会更高.
1.2 基于BDS 的航空器追踪监控系统
基于BDS 的航空器追踪监控系统总体架构如图1 所示,整个系统主要由安装在飞机上的机载BDS设备、空间的BDS 星座、BDS 地面中心站、行业BDS 数据中心(主/备)、专线网络以及各类用户接入网络及应用系统组成.系统主要用于满足我国航空器运行过程中自主可控的追踪监控需求,基本的追踪监控要素包括:飞机身份信息、BDS/GPS 经纬度、高度、磁航向、地速、俯仰角、横滚角、飞机燃油量等.

图1 基于BDS 的航空器追踪监控系统总体架构
此外,支持用户根据需求定制传输气象信息、飞行动态、异常机应答机编码、重要的故障信息等.对基本追踪监控要素,机载BDS 设备按60 s 间隔自动发送,对重要突发信息和监控的异常状态,由机载设备自动触发,以单独的报文报送或附加在基本监控要素的报文内容之后传输.除机载BDS 设备自动下发外,用户地面系统还具备主动查询当前BDS 坐标、机上燃油量、设备状态等信息的功能.机载BDS设备还预留了接口,支持与机上显控设备集成,实现空地双向报文通信.
2 机载BDS 设计
机载BDS 的设计需要符合中国民航局发布的技术标准规定的要求.机载BDS 主要基于BDS 定位功能对航空器进行实时定位,并使用短报文功能将解算的BDS 位置信息、存储的航空器识别号和从飞机系统得到的航班号、机载燃油量、飞行姿态信息等参数按照设定的发送频次周期性地发送给地面站台.机载BDS 由收发机和天线组成,收发机和天线之间通过射频同轴电缆连接,天线由收发机供电,具备抗干扰和防雷功能.收发机内设计了飞机身份信息模块,用于存储飞机身份信息,包括航空器识别号、通信目的地址、飞机总线接口特性配置及机型特定的构型配置信息等.
2.1 机载BDS 收发机
机载BDS 收发机用于实现BDS 定位、通信和机载总线数据的获取和解析等功能,主要由综合处理模块、BDS 通信模块、BDS 定位模块、电源模块和接口模块等组成.图2 给出了机载BDS 收发机组成框图,各组成模块功能介绍如下:

图2 机载北斗收发机组成框图
a) BDS 通信模块
BDS 通信模块处理来自BDS 天线的射频信号,完成模数转换、信号处理和电文解算等,并将解析内容发送给综合处理模块;同时将来自综合处理模块处理后需要发送的短报文数据内容进行信号处理、变频、数模变换为射频信号后,发送给BDS 天线,实现报文信号的发送和接收.
b) BDS 定位模块
BDS 定位模块处理来自BDS 天线的射频信号,完成模数转换、信号处理和电文解算等,将解算获得的定位等信息送到综合处理模块.
c)接口处理模块
接口处理模块实现与机上机载总线进行数据交互,对外接口包括:ARINC 429 总线接口、离散量输入/输出接口、以太网总线接口和电源接口.
d)综合处理模块
综合处理模块实现北斗收发机自检、接收来自通信和定位模块的数据并处理、接收来自接口处理模块信息并处理,并将信息按照通信协议打包后通过通信模块发送出去.
e)飞机身份信息模块
飞机身份信息模块通过接口处理模块与综合处理模块实现信息的交互,主要用于存储飞机身份信息、北斗用户卡的读写等功能.
f)电源模块
北斗收发机采用28 V 直流供电,电源模块处理后为设备的各组成模块供电,实现电源转换、浪涌保护、储能等功能,同时为机载北斗天线供电.
2.2 机载北斗天线
如图3 所示,机载北斗天线主要由天线振子、滤波器、功率放大器(PA)、低噪声放大器(LNA)、合路器、双工器、电源模块组成,其中:

图3 机载北斗天线组成框图
a) 天线振子:实现空间电磁波与传输线电磁波的转换功能;
b) 滤波器:完成发射信号的滤波,减小对其他设备的影响程度;
c) PA:将发射信号放大至所需水平,满足上行发射要求;
d) LNA:在可接受的信噪比恶化条件下,放大接收信号;
e) 合路器:通过合路器实现各频点接收信号的复用;
f) 双工器:通过双节环路器实现收发双工;
g) 电源模块:通过电源模块实现电压转换和电源滤波.
2.3 航电系统集成
北斗收发机通过安装支架固定在飞机客舱的长桁上,北斗天线通过四颗紧固螺钉安装在飞机蒙皮外.整个机载北斗系统从取电面板接引28 V 直流供电,并通过ARINC 429 总线与飞机航电系统连接,从航电系统获取航班号、机载燃油量、航向、横滚角、俯仰角等信息,通过离散信号接口从飞机系统获取空地状态指示信号,当飞机离地后自动开始向地面发送报文信息,落地后自动停止发送,机载北斗系统与航电系统的集成方案如图4 所示.

图4 航电系统集成方案
2.4 通信协议设计
北斗二号(BDS-2)短报文民用三级授权单次报文长度为628 bit,北斗三号(BDS-3)区域短报文通信(RSMC)单次报文最大长度为14 000 bit,北斗三代全球短报文通信(GSMC)单次报文最大长度为560 bit[8].根据系统限制以及应用需求,设计了一套具备良好扩展性的通信协议,通信协议兼容BDS-2 和BDS-3.表1 中给出了用于航空器追踪监控的通信协议各字段定义.

表1 基于BDS 的航空器追踪监控通信协议
3 BDS 地面系统
3.1 系统软件架构设计
为满足高并发访问和大数据分析需求,BDS 地面系统采用微服务分布式架构设计,系统具备云能力开放架构,便于后续与不同厂家、平台和业务进行对接与集成.整个软件系统由数据集成层、传输层、服务层、发布层、代理层、展示层组成,软件架构如图5 所示.

图5 航空器追踪监控地面系统逻辑架构
1)数据集成层:地面数据采集系统的数据集成层采用数据集群的方式实现数据的读写、运算、存储高并发,包含Cache Persistence、SQLDB Cluster、Memory Cache Cluster 三部分内容.
2)传输层:负责数据集成层与服务层实现分布式进程通信功能,包含:Spring Cloud Bus 消息总线、Spring Cloud Task 任务调度、Spring Cloud Stream 数据流操作等.
3)服务层:主要实现基础数据集群服务、数据采集服务、数据处理服务、数据分析服务、运营管理服务、系统维护服务和数据共享服务等功能,由Spring Boot、Eureka 服务治理、Config 配置管理、Sleuth 链路跟踪、Turbine 集群监控和Hystrix 容错保护组成.
4)服务层:通过Zuul 服务网关实现客户端直接与多个微服务通信,从而实现多业务调用.
5)发布层:采用Tomcat+Docker 搭建系统分布式发布服务集群,将不同微服务业务分开,实现地面系统的高并发负载均衡能力.
6)代理层:地面系统的代理层采用Nginx+Keepalived 反向代理技术与发布层进行通信,搭建分布式Web 高并发负载均衡框架.代理层的故障检测策略包括:采用六台虚拟机,在Keepalived 配置Nginx的Master、Backup 主备关系,保证有三台服务器同时工作;当一台Nginx 代理服务出现故障时,访问转移到另一台上继续工作,保证访问不间断.
7)展示层:地面系统的展示层采用浏览器/服务器架构,用户可以通过网站实现前端访问数据展示功能,前端设计兼容目前主流浏览器.
3.2 系统硬件拓扑
BDS 地面系统硬件拓扑如图6 所示,主要包括数据采集服务器、运行管理服务器、数据处理服务器、运维服务器、核心交换机、防火墙、北斗指挥机、数据采集终端、数据分析终端、运营管理终端、系统维护终端、光纤交换机、存储阵列、操作台、KVM、机柜和大屏幕显示系统等.系统网络采用经典的星形拓扑建设,局域网内各个服务器和终端均是千兆带宽,足以满足服务器之间的内部通信.控制网络和数据存储网络物理隔离,确保互不影响.为保障平台运行网络安全,采取以下网络安全措施:

图6 基于BDS 的航空追踪监控地面系统硬件拓扑
1)防火墙设备:对信息网络进行边界隔离,严格控制网络中各个安全区域的访问,明确访问的来源、访问的对象及访问的类型,确保合法访问的正常进行,杜绝非法及越权访问;同时有效预防、发现、处理异常的网络访问,确保信息网络正常访问.
2)网关服务:对所有访问系统中的数据行为均按照安全规则进行管理,并对系统安全进行周期性评估.针对信息网络中使用的操作系统,要保障服务器及终端的安全和正常运行,为应用系统提供及时多样的服务,不受到病毒恶意侵害或未经授权的存取与修改及对系统的攻击行为.
3)安全保密:采取多种技术手段保证数据传输的保密性、真实性和完整性,包括用户账户网络认证和访问控制技术、密钥交换与数据加密技术等.所有需要通过对外接口上报的数据进行加密传送,保护本系统远程数据传输的安全.
4 BDS 试验数据分析
BDS 地面系统主界面如图7 所示,通过BDS 传输的航空器位置等数据所生成的图形化信息实时显示在用户界面上,用户可通过浏览器远程访问.在用户界面中,地面系统接收到的BDS 位置信息、机载燃油量、俯仰角、横滚角、航向等信息经地面系统处理后可实现对航空器的位置追踪、燃油消耗监控、飞行动态监控等应用.
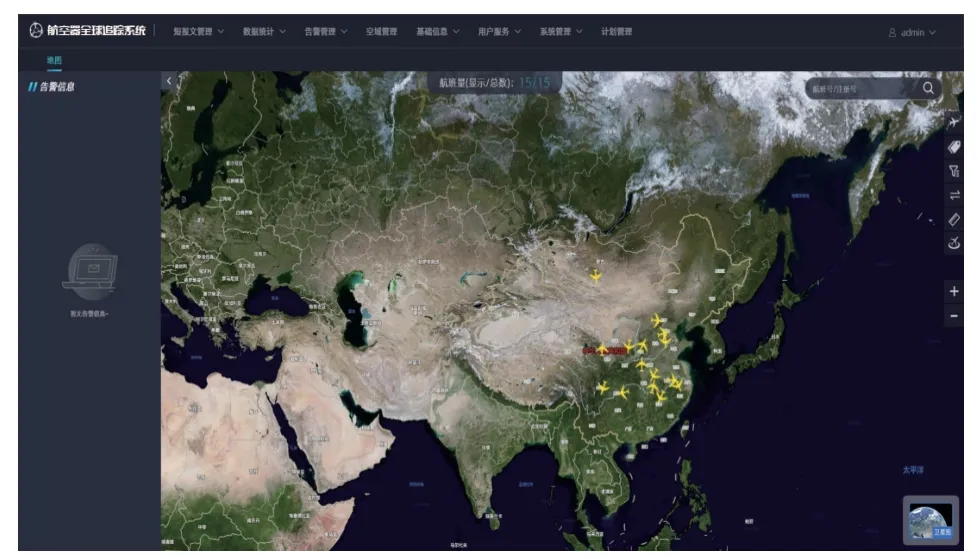
图7 航空器追踪监控地面系统主界面
4.1 通信情况分析
机载北斗设备完成装机后开展了飞行试验,图8中给出了十六次不同日期飞行试验中地面系统统计的通信成功率,平均通信成功率为96.51%.图9 为不同高度层飞行时的丢包情况分析,根据试验数据统计,在3 km 以下丢包相对显著,可能是受地面电磁环境影响且飞机处于爬升过程中所致;其他飞行高度时并无显著规律,尚有待进一步积累数据进行分析.

图8 通信成功率分析

图9 不同飞行高度丢包数量占比
4.2 BDS 和GPS 数据对比
由于BDS 使用的是CGCS2000 坐标系,GPS 使用的是WGS-84 坐标系,考虑到WGS-84 坐标系与CGCS2000 坐标系之间差别极小[9],对比较BDS 和GPS 航迹一致性的影响可以忽略不计.图10 绘制了一次完整飞行试验中机载北斗设备内部存储的BDS定位数据和机上记录设备存储的机载GPS 接收机定位数据所生成的航迹,可见BDS 航迹和GPS 航迹具有良好的一致性.

图10 BDS 与GPS 航迹 对比
5 结束语
本文基于BDS 定位与短报文通信功能设计的航空器追踪监控系统实现了自主可控的航空器追踪监控,利用BDS 的定位功能对航空器进行实时定位,通过机载ARINC 429 总线实时采集机载系统重要参数,通过BDS 通信链路周期性下传,为航空公司提供了对航空器位置追踪和飞行状态的感知能力.机载系统通过扩展可与机上人机接口(如便携式电子飞行包或机载显示终端)互联,实现空地双向报文通信,对航空器的追踪与监控和应急通信具有重要价值.文中介绍的机载北斗设备支持BDS 全球定位功能和短报文通信功能,采用大功率发射信号瞬时隔离、卫星导航信号抗干扰技术,解决了在RSMC 信号发射和机载复杂电磁环境下可靠连续定位的问题;采用无内置电池的电能存储技术实现了收发机热启动场景下的时间保持问题;采用载波相位和码相位补偿、短报文功能优化、最优波束选择技术提高了高动态场景下的短报文通信成功率.本文所设计的系统已在国内航空公司运营的现役飞机上实际应用,后续将开展基于BDS 的异常航班追踪研究和基于BDS 全球短报文的航空器全球追踪监控应用,并实现BDS 数据与监视雷达、广播自动相关监视数据的融合处理应用验证.
