基于扩展天线的智能手机GNSS RTK定位性能研究
2023-07-31袁良雄王浩申志恒
袁良雄,王浩,申志恒
(武汉大学测绘学院,武汉 460079)
0 引言
随着芯片技术的发展,智能设备通过集成低成本的全球卫星导航系统(GNSS)芯片,可以为用户提供米级精度的定位结果,大众智能终端在位置服务领域的应用逐渐广泛[1].然而,由于智能手机使用的是低成本、低功耗的线性极化天线,使得GNSS 原始观测数据质量较低,主要表现为伪距和载波的噪声大、载噪比(CNR)低及多路径效应严重等,限制了智能手机定位的精度[2].大众市场的芯片组只能实现2~3 m的定位精度,在多路径效应严重的情况下,定位精度可能下降到10 m 甚至更低[3].
目前已有许多国内外学者针对智能手机GNSS定位进行研究.文献[4-5]研究发现智能设备的CNR变化快,CNR 平均值比测量型接收机低约10 dB-Hz,伪距噪声和载波相位噪声分别约为测量型接收机的10 倍和3~5 倍.文献[6]表明在观测条件良好时,智能手机实时动态(RTK)定位精度可以达到分米级水平,在平面方向上可以收敛到20 cm 以内,高程方向上可以收敛到50 cm 以内.近年来的研究证实,嵌入式天线的智能设备只能达到亚米级的定位精度,且难以固定模糊度.文献[7]发现通过将嵌入式天线替换为外接测量型天线,可以缓解严重的多路径效应,并且提高CNR 水平.文献[8]实验显示使用外置天线的华为P40 手机零基线差分相对定位精度可达毫米级.
Mi8 手机是世界上第一款具有双频观测数据的智能手机,已有很多学者做过相关的研究和分析,并且Mi8 手机不受“Duty Cycle”机制的影响,所以我们选用Mi8 作为实验设备进行外接天线智能手机RTK定位性能的研究.同时为了满足高精度、低功耗和便携性的需求,我们使用外接轻量级的螺旋天线进行观测数据质量的分析和测试.主要分析内容包括伪距噪声、载波相位噪声及其随高度角/CNR 的变化趋势.在此基础上我们给出了基于高度角定权和CNR 定权两种随机模型,并使用外接天线的Mi8 手机在静态和动态场景下分别进行了实验,最后分析和评估了不同随机模型对定位精度的影响.
1 智能手机RTK 定位方法
1.1 手机GNSS 观测数据质量分析
1.1.1 GNSS 观测方程
GNSS 信号从卫星系统中生成并向地面发射,经过大气层传播至接收机天线处,再经处理后生成伪距和载波相位观测值等观测数据.接收机通过测量卫星信号的传播时间获取伪距观测值.通过比较接收机产生的载波相位与接收到的载波相位获取载波相位观测值.信号在传播过程中会产生多种误差,在频率i下跟踪的接收机与卫星之间的伪距和载波相位观测可分别建模为:
1.1.2 CNR
CNR 是卫星的信号强度,为接收机收到的信号功率PS噪声的功率PN之比.CNR 是衡量卫星观测质量的一个重要参考指标,与卫星天线、信号传播损耗和接收机硬件密切相关[9].一般情况下,室外GNSS 接收机信号的CNR 值为35~55 dB-Hz.针对于智能手机,通过对比内置天线和外置天线可以发现,外置天线各卫星的CNR 普遍高于内置天线[8].CNR 公式如下:
式中,BN为噪声带宽.
1.1.3 伪距残差
伪距残差是评价观测值质量的重要指标,在实际应用中,零基线和短基线观测方法被广泛用于评估GNSS 接收机观测数据质量.站间单差可以消除卫星轨道误差和卫星钟差等与卫星有关的误差、电离层延迟误差和对流层延迟误差等具有空间相关性的误差.伪距单差观测值如下:
接收机钟差cΔδt为系统偏量,可以采用参数估计法得到其数值并扣除.根据式(4),通过事先获得的基准站和移动站的高精度坐标反算出综合误差项,进而可以提取出基准站与流动站之间含有的多路径误差和伪距噪声误差综合项
1.1.4 相位残差
忽略历元间相关性,一种简便的载波相位测量噪声评估方法是历元间三次差法.历元间三次差方法类似于高通滤波器,在保留高频噪声的同时排除了低频测量延迟.相位测量噪声计算公式如下:
式中:Φ (k) 为k历元的载波相位观测值;Δt为时间间隔是根据误差传播定律得到的系数.历元间三次差法需要连续观测和高采样率.
1.2 智能手机常用的随机模型
确定观测值的权重是GNSS 定位中十分关键的一步,一般情况下观测值权重取决于观测数据的质量.目前,观测值随机模型主要包括等权模型、卫星高度角定权模型与卫星CNR 定权模型等.
1.2.1 高度角定权模型
当卫星高度角较低时,大气延迟误差和多路径误差将会增大,因此可以根据卫星的高度角确定观测值的先验方差.本文采取一种常见的基于高度角的三角函数随机模型如下:
式中,σ 表示卫星高度角为E时的观测值中误差;σ0为天顶方向观测值中误差.
1.2.2 CNR 定权模型
CNR 作为信号质量的评价指标,在一定程度上反映了观测数据的噪声水平.在智能手机的定位中,常用的一种基于CNR 定权的随机模型为[11]:
1.3 RTK 定位原理及模糊度固定策略
RTK 即实时动态相对定位,进行RTK 测量时,位于基准站(具有良好GNSS 观测条件的已知站)上的GNSS 接收机通过数据通信链实时地把载波相位观测值等信息播发给在附近工作的流动用户,这些流动用户就能根据基准站及自己所采集的观测数据进行实时相对定位.
1.3.1 RTK 定位原理
RTK 定位通常采用站间星间双差模型,可以消除卫星钟差、接收机钟差、星历误差、信号时延误差,并可以削弱电离层和对流层误差,在短基线(<10 km)的情况下,使误差可以进一步削弱.鉴于此,将RTK 定位技术应用于智能手机定位可以取得较高的定位精度.
双差观测方程为:
1.3.2 模糊度固定策略
零基线和短基线解算通过双差消除绝大多数误差,从而可快速实现双差整周模糊度的固定和基线固定解 (Δx,Δy,Δz)[12].模糊度固定可采用最小二乘模糊度降相关平差(LAMBDA)方法,一旦模糊度固定,即可得到基线固定解:
2 实验数据质量分析
2.1 实验设计
为了研究外接天线智能手机RTK 的定位性能,我们采用外置低成本螺旋天线在Mi8 上进行了静态和动态实验.如图1 所示,Mi8 和GNSS 大地测量接收机Septentrio PolaRx5S 通过功分器连接到同一GNSS 天线,数据记录采用Geo++RINEX (Receiver INdependent EXchange format) Logger 软件获取智能手机的GNSS 原始测量值,上位机软件RxTool 记录Septentrio 的GNSS 原始测量值.Mi8 嵌入式天线已被拆除,并且使用屏蔽盒来消除Mi8 嵌入式剩余天线的影响.Mi8 和Septentrio PolaRx5S 接收机组成零基线作为流动站,以接收机的定位结果作为参考真值,基准站为武汉大学测绘学院楼顶的一台Septentrio高精度GNSS 接收机.

图1 静态实验场景
静态实验在武汉大学信息学部4 号楼天台进行,基线长度50 m 以内.实验时间为2021 年11 月19 日14:30 至18:30,使用低成本螺旋天线连续采集4 h 观测数据,时间间隔为1 s.
动态实验在学校操场上进行,操场四周有高大的树木环绕,基线长度300 m 以内.实验装置放置在小车上,其运动轨迹如图2 所示.小车先静止不动几分钟,然后沿着操场慢走一圈,最后回到起点.实验时间为GPS 时2021 年11 月19 日14:49 至15:09,本次实验同样使用低成本螺旋天线作为Mi8 手机的外接天线.

图2 动态实验轨迹
2.2 CNR 分析
为了分析外置天线手机与测量型接收机接收信号的CNR,图3 和图4 给出了在静态空旷环境下外接天线的Mi8 手机和测量型接收机在观测时段内观测到的所有卫星CNR 的变化情况.可以看出:对于外接天线的Mi8 而言,接收到卫星信号的CNR 主要分布在40~46 dB-Hz,少数历元部分卫星CNR 值在35 dB-Hz 以下;对于测量型接收机而言,CNR 的变化规律与Mi8 基本一致,主要分布在40~48 dB-Hz.而在使用Mi8 自带线性极化天线的情况下,大部分观测值的CNR 为30~40 dB-Hz[13],说明在外接低成本螺旋天线后,Mi8 接收到的卫星CNR 有了较明显提升,提升了约10 dB-Hz.

图3 观测时段外接天线Mi8 手机CNR

图4 观测时段测量型接收机CNR
图5 和图6 分别为外接天线的Mi8 和测量型接收机接收到卫星信号的CNR 与其高度角的关系.可以看出,两者变化规律相近:高度角在15°~ 40°时,CNR 随高度角的升高而快速提升;在高度角大于40°之后,CNR 波动幅度很小,基本不变,即卫星观测信号的CNR 与其高度角具有一定的相关性.文献[14]指出智能手机在使用内置天线时的CNR 与高度角之间的相关性不足,而本实验将手机外接天线后,在低高度角的情况下CNR 与高度角的相关性得到提升.

图5 外接天线Mi8 手机CNR 与高度角的关系
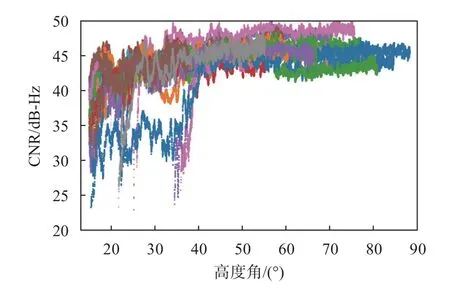
图6 测量型接收机CNR 与高度角的关系
2.3 伪距残差分析
2.3.1 伪距观测值测量精度
伪距残差是GNSS 观测数据质量的重要评价指标,图7 给出了观测时段内所有卫星的伪距单差残差,其绝对值大部分分布在0~5 m,标准差约为1.23 m,之前已有学者对Mi8 内置天线的观测噪声进行了详细的评估与分析,伪距噪声约为20 m,伪距残差标准差约为8 m[15-16],说明外接天线后Mi8 手机观测数据质量得到了提升.

图7 观测时段内外接天线Mi8 手机伪距单差残差
2.3.2 伪距残差与卫星高度角及CNR 的关系
一般地GNSS 卫星高度角越低,信号在传播的过程中受到的电离层延迟和对流层延迟的影响也就越大,并且受到的多路径效应也越明显.我们选取C35 卫星和G14 卫星为例进行分析,图8 和图9 分别给出了静态场景下外接天线的Mi8 手机C35 和G14 卫星CNR、高度角与伪距残差的时间序列.结果显示:在卫星高度角低于35°时CNR 随高度角下降而有着较为明显的下降;但在卫星高度角高于35°时CNR 整体变化不大,与高度角之间没有明显的相关性.且可以看出:在CNR 和高度角都较高时,伪距残差基本维持在3 m 的范围之内;当高度角下降到35°以下时,此时CNR 也开始下降,伪距残差波动幅度开始逐渐增大,最高接近10 m.

图8 外接天线Mi8 手机的C35 卫星伪距残差随CNR 和高度角的变化

图9 外接天线Mi8 手机的G14 卫星伪距残差随CNR 和高度角的变化
为进一步探究外接天线智能手机GNSS 伪距噪声与卫星高度角和CNR 之间的相关性,图10 和图11分别给出了伪距残差随高度角与CNR 的变化.图10显示在高度角逐渐增大的过程中,伪距残差从最高的13 m 下降到了5 m 以内.相较于内置天线[17],在外接天线后,智能手机伪距残差与高度角之间具有更加明显的相关性.从图11 中可以看出,手机伪距残差总体上随CNR 的增大而减小,尽管该组数据低于35 dB-Hz 的观测值较少,但仍能发现在CNR 低的情况下观测值的噪声要明显更大一些.结果表明:对于外接天线的智能手机来说,伪距残差与高度角和CNR 之间均具有较为明显的相关性.

图10 外接天线Mi8 手机伪距残差与高度角的变化关系
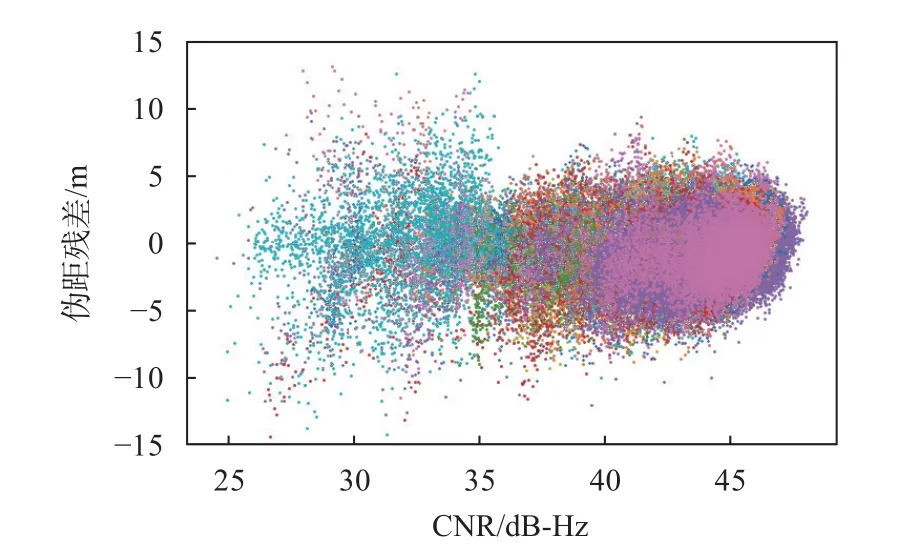
图11 外接天线Mi8 手机伪距残差与CNR 的变化关系
在传统的高精度GNSS 定位中广泛采用卫星高度角对观测结果进行加权,但先前的研究表明,它不适用于智能终端的测量[18].这是因为对智能终端而言,其测量误差与卫星高度角之间的相关性并不明显,但是智能手机在外接天线后,通过静态实验数据质量分析后发现测量误差与卫星高度角和CNR 都有较为明显的相关性,因此本文采用高度角定权和CNR 定权两种随机模型分别进行RTK 定位解算.高度角定权使用公式(6);CNR 定权使用公式(7)~(8),分别对GPS 和北斗的伪距残差进行拟合,得到GPS CNR 定权参数a=1.48 m2,b=2.18×104m2Hz;北斗卫星导航系统(BDS)定权参数a=1.09 m2,b=2.18×103m2Hz.拟合情况如图12~13 所示.
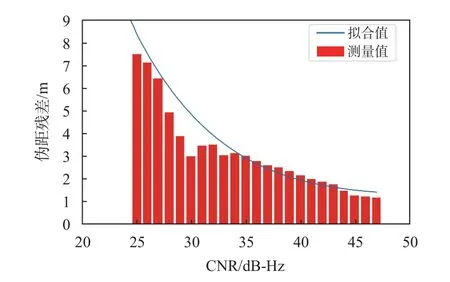
图12 GPS 伪距残差拟合
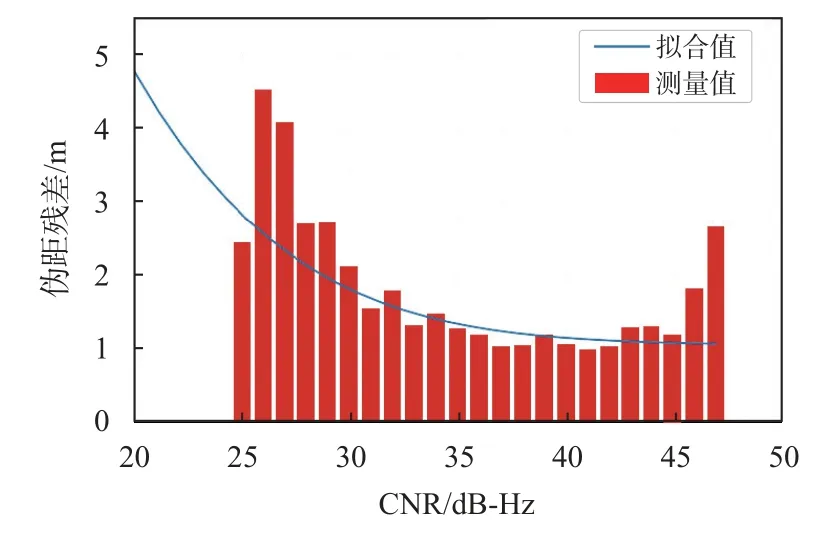
图13 BDS 伪距残差拟合
3 定位结果与分析
3.1 静态RTK 定位结果
图14 给出了在使用高度角和CNR 定权模式下,Mi8 手机在静态场景中RTK 的定位误差,其结果是由以Septentrio PolaRx5S 接收机的定位结果作为参考真值,与Mi8 滤波解算得到的固定解作差得到,动态实验也一样.可以看出两种定权方案定位精度均在厘米级范围内,表明相较于使用内置天线的智能手机分米级的 RTK 定位精度,外接天线后的定位精度有了很大的提升.图15 给出了两种定权方案的平面位置误差,结果显示使用CNR 定权的平面定位结果比使用高度角定权的结果略微集中.

图14 两种定权模式下外接天线Mi8 手机静态RTK 定位精度
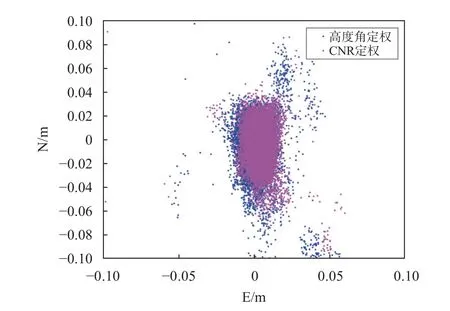
图15 两种定权模式下外接天线Mi8 手机静态RTK定位平面精度
表1 进一步给出了静态场景下两种定权方式RTK 定位精度均值与均方根(RMS)值,采用高度角定权模型平面RMS 约为0.106 m,高程RMS 约为0.058 m;而采用CNR 定权模型平面和高程方向RMS 分别为0.061 m 和0.028 m.结果表明在外接天线后,两种定权方案的定位精度均在厘米级,但采用CNR 定权的定位精度更高,较高度角定权在水平和高程方向上分别提升了42%和52%.

表1 外接天线Mi8 手机静态RTK 定位精度 m
3.2 动态RTK 定位结果
为了测试外接天线的Mi8 手机动态RTK 定位性能,动态实验地点选取在学校操场,分别采用高度角定权和CNR 定权模型进行解算,解算结果转换到东(E)、北(N)、天顶(U)方向上如图16 所示.实验表明:在动态环境下,外接天线的Mi8 手机初始定位误差较大,但经过一段时间可快速收敛,且大部分时间各方向定位精度均在厘米级,在实验最后一小段时间内由于观测环境较差而导致误差有一定增大趋势.

图16 两种定权模式下外接天线Mi8 手机动态RTK 定位精度
表2 给出了动态场景下两种定权方式RTK 定位精度均值与RMS,采用高度角定权模型平面RMS 约为0.140 m,高程RMS 约为0.101 m,而采用CNR 定权模型平面和高程为0.117 m 和0.050 m,结果显示使用CNR 定权较高度角定权在水平和高程方向上分别有约16%、50%的精度提升.
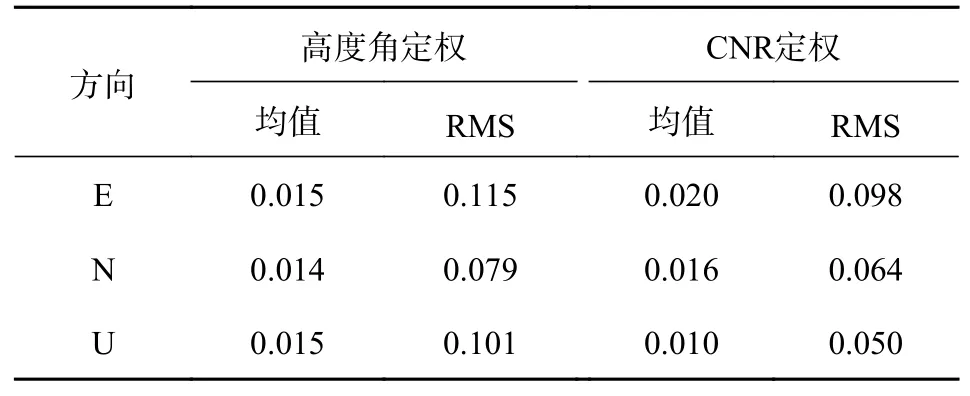
表2 外接天线Mi8 手机动态RTK 定位精度 m
4 结束语
本文对外接天线的智能手机的RTK 定位展开研究,利用外接低成本螺旋天线的Mi8 手机分别进行静态实验和动态实验,对手机GNSS 观测数据质量进行了分析,并且使用两种定权模型对外接天线手机的RTK 定位性能进行了研究,得出以下结论:
1) Mi8 手机在外接天线后,观测时段内接收到的卫星CNR 主要分布在40~46 dB-Hz,相对于内置天线的智能手机CNR 水平有了较大提升,且和测量型接收机CNR 水平几乎相当.
2)外接天线的Mi8 手机伪距残差相较于内置天线手机有了一定减小,伪距残差在5 m 之内,相位残差在3 周之内.并且不同于一般的智能设备,Mi8 在外接天线后,伪距残差与高度角和CNR 之间均具有较强的相关性,因此可使用高度角定权和CNR 定权两种定权模型.
3)尽管基于以上两种随机模型Mi8 手机RTK的定位精度均可达到厘米级,但是使用CNR 定权相较于高度角定权的随机模型定位精度有明显的提升.具体表现为在静态场景下采用CNR 定权较高度角定权在水平和高程方向上分别提升了42%和52%;动态场景下使用CNR 定权较高度角定权在水平和高程方向上分别有约16%和50%的精度提升.
致谢:感谢GREAT 软件对本文计算的支持!