GNSS-IR 解译地表环境参数研究进展及展望
2023-07-31周昕张双成张勤刘奇马中民刘宁
周昕,张双成,2,张勤,刘奇,马中民,刘宁
(1.长安大学地质工程与测绘学院,西安 710054;2.地理信息工程国家重点实验室,西安 710054)
0 引言
全球卫星导航系统(GNSS)遥感是卫星导航技术与遥感技术不断融合发展起来的新的交叉学科,利用GNSS 免费提供的覆盖全球、全天候、连续的L波段的微波信号进行遥感探测.具体来说,即将GNSS在导航定位中与信号传播相关的误差和经地球表面的反射信号转化成进行遥感探测感知环境的信号源,是一种全新的遥感手段.依据对GNSS 卫星信号不同的应用方式,目前通常将GNSS 遥感总体划分为两类,分别是GNSS 折射信号遥感(GNSS Refractometry)和GNSS 反射信号遥感GNSS-R(GNSS Reflectometry).GNSS 反射遥感技术是指利用卫星信号经过反射物的反射后,接收机接收的反射信号会因反射物(如水面、地面、建筑物与植被等)的不同而发生相应的改变,从中提炼出关于研究对象的大量信息.依据接收和处理反射信号方式的差异,GNSS-R技术测量模式可分为“多天线模式”与“单天线模式”[1-2].多天线模式采用特制的接收机和两副天线分别接收直射信号与反射信号.接收机主要接收高仰角的GNSS 反射信号,通过分析反射信号伪随机码的时间延迟和相关峰值功率及波形的变化,并结合电磁波散射理论,反演出地表的物理参数.其观测平台有星载、机载和地基模式.而单天线模式只基于常规的大地测量型接收机,因此观测平台仅为地基模式,它利用低仰角范围内GNSS 信号信噪比(SNR)序列中的干涉振荡特性,便可完成对站点周围环境的监测,称为GNSS 干涉遥感(GNSS-IR)技术.
1996 年,国外学者Axelrad 等[3]指出SNR 观测值可以用来表示多径信号的频率和幅值.Bilich 等[4]发现SNR 观测对多路径环境的变化很敏感.Larson等较早的研究了利用SNR 估计多路径环境的原理与可行性,并于2008 年创新性地提出了GPS-IR 技术[5],即利用常规大地测量型GPS 接收机进行地表参数信息反演,进一步为GNSS 遥感领域注入新的活力.现有的多项研究发现,GNSS-IR 技术在土壤湿度、植被生长、积雪深度和水位变化等地表环境参数监测方面表现良好,并取得了一系列具有重要价值的理论与应用成果.
除了上述应用,Nievinski 等[6]开发了一个模拟器,允许用户模拟不同环境参数的反射特性,以更好地理解多径观测对环境变化的响应.Roesler 等[7]开发了GNSS-IR 工具,实现GNSS-IR 反射点轨迹和菲涅尔反射区的绘制、SNR 频率的计算、反射面高度的估算等功能.Larson[8]以更简单、更直观的Web 应用程序的形式实现了GNSS-IR 工具的功能.
本文详细描述了GNSS-IR 原理和方法及其最新应用进展,包括土壤湿度、植被监测、积雪深度、水位探测等,对GNSS-IR 技术进行了全面概述.最后给出了将来GNSS-IR 的应用前景和展望,包括GNSS-IR技术的独特优势以及面临的挑战.
1 GNSS-IR 遥感原理与方法
GNSS-IR 技术一般采用的是大地测量型接收机,主要接收右旋圆极化(RHCP)信号,接收机天线朝上.虽然该种接收机抑制了反射信号,但在低卫星高度角时,依然可以接收到反射信号,并与直射信号叠加在一起产生多路径效应,反射信号携带的地表特性信息体现在多路径中,因而,可以通过多路径信息反演地表反射面的物理特征.本章节将介绍GNSS 多路径,以及与SNR 的相互关系和GNSS-IR 解译地表环境参数基本原理.
1.1 GNSS 多路径和SNR 特性分析
GNSS 天线对来自卫星的直射信号敏感,但在GNSS 实际测量中,接收机天线并不能完全抑制反射信号,因此一部分经天线周围物体反射的卫星信号同样会到达天线并被接收机记录,两种信号的叠加改变了天线相位中心(APC)位置,导致观测值偏离真实值,产生所谓的“多路径误差”[9].多路径误差的变化随接收机天线周围反射面的性质不同而异,很难控制,其会对GNSS 测距码与载波相位观测值造成影响.因此,多路径效应误差是高精度定位中的重要误差源.在高精度定位的数据处理中,一般选择剔除低高度角数据,这样可减少多路径误差.
GNSS 卫星发射的信号在接近地面时,特别是卫星高度角较低时,会与各种反射面发生反射,比如土壤、积雪和水面等,相较于直射信号反射信号会形成一个相位差,并且信号强度一般也会减少,具体表现在振幅上.因此,GNSS 接收机接收的信号实际是直射信号与反射信号的合成信号.由于经不同反射面所形成的反射信号分量不尽相同,反射信号中极大可能包含了反射面的一些物理特性,即反射信号可以在一定程度上反映测站周围的观测环境信息.
图1 是GPS 卫星多路径误差时间序列以及其高度角.可以看出,伪距多路径误差的振荡幅度较大,可以达到数米;同时,随着高度角的变化,多路径也相应变化.低高度角的情况下,由于受观测环境等影响,多路径效应比较严重,出现剧烈的振荡;当高度角升高后,多路径对测量的影响迅速降低,并趋于稳定.这个特征为下面多路径与SNR 关系的研究进而应用到GNSS 反射测量技术中提供了基础.
SNR 是指接收的载波信号强度与噪声强度的比值,通常被用来衡量接收信号的质量好坏.在RINEX文件中表示为S1 和S2 观测值数据,一般表示为C/N0,单位为dB-Hz[10].它主要受天线增益参数、接收机内部相关器状态、卫星到接收机的距离和多路径效应等因素影响.SNR 观测值被认为是直接信号和反射信号组合而成的干涉信号,如图2 所示,呈现抛物线形式的曲线被认为是直射信号,而低高度角的高频振荡曲线是反射信号所致(虚线框中所示).不同于载波伪距中所包含的多路径信息难以全部提取,由GNSS 接收机中记录的SNR 数据也受多路径影响,自可以对多径效应进行量化.
1.2 GNSS-IR 解译地表环境参数基本原理
由于反射信号含有的多路径信息直接影响SNR,在高度角较高条件下,多路径影响较小,天线增益较大,使得SNR 提高;而在高度角较低的条件下,天线增益减小,同时由于多路径效应使得SNR 下降严重,并且低高度角下SNR 受多路径影响而震荡剧烈.GNSS-IR 技术通过低高度角下SNR 的频谱分析来获取地表环境参数,如图3 所示.h为接收机APC 到反射面的高度,即有效垂直反射高;E为卫星高度角,为直射信号和土壤表面的夹角;Ad为直射信号振幅;Am为反射信号振幅.
不存在多路径效应的情况下,即Am=0,此时,SNR 观测值为单一信号Ad的幅度,即 S NR=Ad;当存在多路径效应的情况下,SNR 观测值变为所有信号矢量和的幅度,即 S NR=Ac.因此,在仅发生一次镜面反射的简化模型下,SNR 观测值可表示为
式中:Ad、Am和Ac分别为直射、反射和复合信号的幅度;ψ 为两信号的相位差,当卫星从测站上方经过时,反射几何和 ψ 发生变化,从而引起SNR 幅度的震荡.考虑到接收机天线增益和信号反射过程中的损耗,有:
因此将SNR 数据绘制成曲线图时,曲线的总体变化趋势是由直接信号Ad决定的,即信号的整体趋势走向,如图4(a)中的红色曲线所示.而反射信号Am则表现为伴随在直射信号中的局部周期性震荡中,而这是由低高度角多路径所致.我们常使用低阶多项式拟合实现两者的分离.
去除直射信号后,得到低高度角的SNR 残差序列,如图4(b)所示.表征多路径水平的SNR 可表示为
式中:h为有效垂直反射高;λ 为载波波长;φ为相位.若记t=sin则式(3)可简化为标准的余弦函数表达式:
对 S NRm曲线进行Lomb-Scargle 谱(LSP)分析得到多径反射信号的频率f,然后利用非线性最小二乘求解出振幅与相位观测量.如图3 所示,因SNR 特征频率取决于GNSS 天线到最高反射表面(例如,雪层顶部或裸露土壤顶部)的垂直距离,而振幅与相位主要取决于表面类型(植被和湿土)[11],利用GNSS 反射信号中的振幅、相位和频率等参数来实现对地表环境信息参数提取.
2 GNSS-IR 遥感研究进展
1993 年,Martin-Neira[12]首次提出利用GPS 反射信号建立测量海面高度系统PARIS (Passive Reflectometry and Interometry System).Kavak 等[13]随后提出利用GNSS 接收机单一的RHCP 天线接收的反射信号与直射信号耦合在一起所产生的干涉现象,测量地面介电常数.经过20 多年的发展,GNSS-IR 技术已在诸多领域取得了多项重大突破,主要集中在土壤湿度、植被、积雪深度和水位等参数的反演.
2.1 土壤湿度
土壤湿度作为陆地水循环和能量循环一个至关重要的变量,不仅能够影响净辐射能量转换为潜热和感热的分配比例来影响气象和气候[14],还能够影响降水转变为渗透、径流以及蒸发蒸腾的比例[15].全球气候观测系统已将土壤湿度确定为基本气候变量.因此,土壤水分的监测对天气预报和气候研究非常有价值[16-17],对灌溉管理和洪水预测也很重要[18].此外,土壤水分在污染物和养分输送中起着重要作用,并影响温室气体的排放[19].通过各种测量手段获取土壤湿度值及其变化,可以在监控土壤干旱程度、植被生长情况,预防滑坡和泥石流等方面提供可靠的数据支撑.
Larson 等[5]首次提出了基于大地测量型GPS接收机的SNR 数据估计土壤湿度算法,通过对直射信号和反射信号进行分离,发现反射信号振幅波动与土壤湿度变化存在良好一致性.同年,Larson 等[20]使用科罗拉多州博尔德地区的接收机数据进行进一步实验,发现浅层土壤湿度的变化中,相位比振幅表现出更大的一致性,其相关系数达到了0.91.Chew 等[21]研究了相位偏移量、振幅对土壤湿度变化敏感性,并且发现相位是裸露土壤条件下反映土壤湿度变化的最佳参数.Chew 等[22]考虑到季节性植被变化对SNR 信号的影响,归一化振幅时间序列长时间保持在0.78 以下可能会受到土壤水分变化以外的其他因素(例如植被)的影响,提出了一种确定SNR 数据是否被植被影响并纠正该影响的方法.Small 等[23]进一步将地表植被的影响分为裸土、简单植被和复杂植被,使用相应的土壤水分反演算法有效地减弱了植被对土壤水分反演结果的影响.Vey 等[24]利用七年的GPS 观测数据进行了长时间序列土壤湿度反演实验,成功获取了土壤湿度的季节性波动和年周期变化.Yang 等[25]通过干涉模式和SNR 对北斗卫星导系统(BDS)B1 和B2 卫星信号验证反演土壤湿度的可行性.Shi 等[26]采用遗传算法反向传播(GA-BP)神经网络模型,将地面GNSS-IR 土壤湿度数据与站点周围其他地表环境参数相结合,通过反演最终得到500 m/d 的高时空分辨率土壤湿度产品.针对起伏地形对GNSS-IR 技术应用造成的不利影响[27],Ran等[28]在解译土壤湿度时提出了一种圆弧编辑方法,只保留干扰模式为典型余弦波形的DSNR 数据,实验结果表明,该方法可以提高在起伏地形中土壤湿度的反演精度.在提取多路径时,Nie 等[29]构建了双频载波相位和双频伪距的多路径误差计算模型,求解延迟相位进行土壤水分反演,结果表明,基于多卫星双频组合多路径误差的土壤湿度反演方法可以替代传统的反演方法,有效提高了GNSS-IR 土壤湿度估算的时间分辨率.如图5 所示,Zhou 等[30]利用滑坡上的GNSS 接收机解译了黄土滑坡形变与土壤湿度,并进行了相关性研究.实验结果如图6 所示,GNSS 不仅能够提供高精度的形变时序特性,也能够同时监测测站周围的土壤含水率变化,并且形变速率与解译土壤湿度有着明显的相同变化趋势,二者具有一定的相应关系,这能够综合评价黄土浅层滑坡的稳定性.
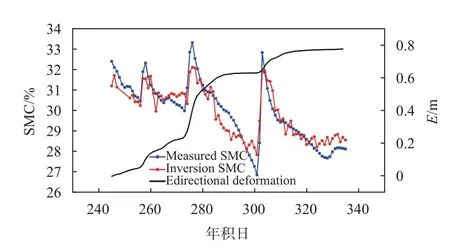
图5 GNSS 解译土壤湿度与位移监测序列[30]
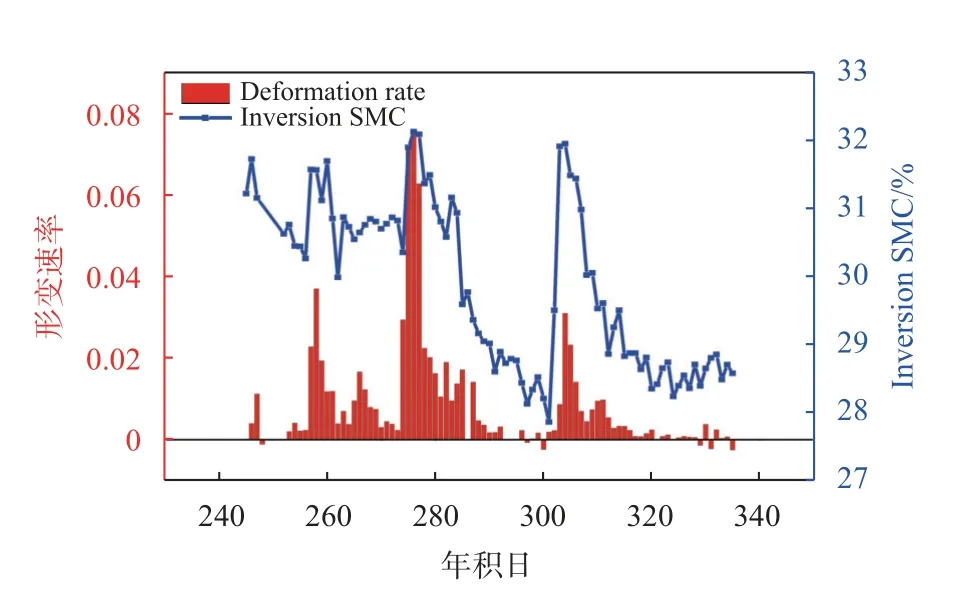
图6 形变速率与解译土壤湿度关系[30]
2.2 植被探测
植被既是气候变化的承载者,又对气候变化有着积极的反馈作用.植被生物量反映了植被生产力的强弱,是植被生态系统中研究植被长势的重要参数之一.监测植被生物量变化便于客观地估计碳循环在气候变化中的作用,对资源的合理利用具有重要意义.传统的遥感卫星解译植被生长过程存在时间分辨率较低的问题,而基于卫星导航的GNSS-IR 技术可用于解译测站周围植被变化,提供高时间分辨率的植被生长过程.
Small 等[31]首次提出了基于多路径解译植被生长,通过实验验证了植被高度和含水量与多路径的大小成反比,并利用板块边界观测(PBO)网络站点进一步测试发现多路径与归一化植被报数(NDVI)之间具有较好的相关性.Ferrazzoli 等[32]进行了森林地区镜面散射系数的理论模拟,发现植被散射系数理论上随着生物量的增加而呈现下降趋势,证明了GNSS-R 在森林生物量监测中的潜力.Alvarez 等[33]发现存在植被时信号能量的衰减更为严重,并利用此特性推断了植被含水量的信息.Egido 等[34]发现对于不同的土壤湿度和植被发育条件,可以监测到GNSS反射信号中功率的显著变化.Larson 等[35]详细介绍了植被含水量如何引起多路径的变化,提出了用归一化微波反射系数(NMRI)衡量植被含水量,并获取了和NDVI 较一致的探测结果.随后,Small 等[36]验证了在蒙大拿州草原地区利用NMRI 探测植被含水量的有效性,并在四个测站得到了一致的结果.Evans等[37]和Jones 等[38]详细地比较了不同地区的NMRI和遥感手段所计算的植被物候的差异,发现大多数测站存在较好的相关性.Chew 等[39]提出了一个模拟SNR 数据对土壤湿度和植被变化相应的一维平面分层模型,并进行了验证.其模拟结果表明,植被湿重的变化(从0 到4 kg·m-2)也会引起SNR 干扰指标的变化,特别是当植被湿重低于1.5 kg·m-2时,SNR 振荡幅度很好地表征了植被数量变化.Wan 等[40]收集了植被类型分别为沙漠草、小麦和苜蓿的GPS SNR 数据,分别对三种植被的含水量进行了探测,通过与实测数据对比分析,发现振幅和植被含水量间呈线性关系.Wu 等[41]开发了一种基于辐射传输方程模型的GPS 多路径模拟器,明确地将植被参数与多路径观测量联系了起来.吴继忠等[42]和祁云等[43]对利用GPS 的SNR 观测值监测植被生物量方法的有效性进行了验证.Yang 等Yang 等[44]在提取地表参数时提到BDS 信号负幅值与NDVI 有一定的相关性.Zhang等[45]基于麦田中大地测量型接收机获取的GPS 和BDS SNR 数据检索土壤湿度和植被生长过程,并研究植被生长对土壤湿度检索的影响.结果见图7 和图8 所示,植被效应显著期之前和之后,GPS L1/L2和BDS B1/B2/B3 频率信号均能很好的反映土壤湿度(VSM)的变化.同时,在小麦覆盖率较高时负归一化振幅与 MODIS NDVI 展现了良好的相关性(R=0.67),其可以作为判断测站植被效应是否显著的依据.Zhan 等[46]基于两个不同植被类型台站的三频信噪比观测数据,获得了BDS 信噪比数据的归一化振幅.结果表明,北斗信号的归一化幅度与Sentinel-2 NDVI 具有较强的相关性,在 P041和P105 处的相关系数分别为0.69~0.83 和0.78~0.84.

图7 相位与原位土壤湿度比较[45]

图8 负振幅和MODIS NDVI 对比结果[45]
2.3 积雪深度
积雪是地球上重要的淡水资源,也是地表覆盖的重要组成部分之一.据统计显示,在冬季北半球陆地表面约有50%的地区被积雪所覆盖[47-49].在干旱、半干旱地区,积雪融水是当地生态系统的重要水源.积雪作为地球表面最为活跃的自然要素之一,其变化在水文、生态和气候系统中发挥着重要作用[50].因此,准确估算积雪和积雪深度及其变化对气候和水文研究至关重要.
Larson 等[51]实验发现传统的大地GPS 接收机的SNR 数据反演的积雪深度与积雪遥测(SNOTEL)网络的现场超声传感器的测量值具有很好的一致性.由于GNSS 观测文件中并不总是存在SNR 数据,Ozeki等[52]通过两个L 波段载波GPS L1 和L2 的双频无几何线性组合(称为L4 方法)检索地表积雪深度.Yu 等[53]提出了GPS L1/L2/L5 信号的三频相位组合,该组合不受几何形状和电离层延迟的影响,可以提取积雪深度.Zhang 等[54]提出了一种改进的结合GNSS 三频载波相位的积雪深度检索方法,利用基于密度的空间聚类,结合噪声算法和归一化方法,考虑反射面的地形特征,估计积雪深度.研究结果表明,与传统的三频积雪深度反演方法相比,该方法对Galileo和BDS 具有更好的反演性能.此外,由于卫星数量的增加和更好的方位角覆盖,该方法的解决方案提高了空间分辨率.Tabibi 等[55]和Zhang 等[56]分别通过聚类卫星方位角和网格化菲涅耳反射区来减轻地面偏差对积雪深度监测的影响.Hu 等[57]引入了机器学习,并使用SNR 弧作为输入数据,实现积雪深度检索前的地面真相信息检测,即无雪状态和积雪状态的分类,检测结果可以约束无雪状态下的检索积雪深度.在存在积雪的状态下,引入了具有自适应高通滤波器特性的变分模态分解(VMD)算法对SNR 数据进行趋势化处理.在此基础上,以最大谱幅值作为熵值法的输入变量,研究了组合策略的可行性[58].Wang等[59]研究了不同星座、不同频段的积雪深度反演精度.Li 等[60]采用插值方法拟合余弦函数模型,结合非线性最小二乘拟合(NLSF) +快速傅里叶变换(FFT)算法反演积雪深度,得到了比传统LSP 分析更精确的结果.Wan 等[61]提出了一种利用复杂GNSS 站网原始数据自动反演积雪深度并控制积雪质量的综合框架.在此基础上,利用所提出的框架和80 个台站的历史数据,获得中国北方地区长期积雪深度数据集.除此之外,为了满足多星座多频率GNSS 数据对积雪深度反演的要求,Zhang 等[62]基于GNSS-IR 工具开发了GiRsnow 的积雪参数处理软件.图9 展示了软件的主界面以及所包含的功能,用户可以通过图形用户界面(GUI)检查数据质量,绘制反射点轨迹和菲涅耳带,使用SNR或L4 观测数据检索积雪深度,并根据时间和空间域显示结果.

图9 软件主界面[62]
2.4 水位监测
水环境是指自然界中围绕人类空间及可直接或间接影响人类生活生产的水体,主要由地表水环境和地下水环境组成,而地表水环境包括河流、湖泊、水库、海洋、池塘、沼泽、冰川等.水环境是构成地球环境的基本要素之一,是人类社会赖以生存和发展的重要场所,同时水环境还是生态环境变化的“指示器”.水环境变化监测的重要工作之一就是水面高度的测量,实现高精度、高时空分辨率、高实时性的水位监测,对保障生态环境以及人民生命财产安全有着十分重要的意义.
基于GPS 测地接收机的水位反演概念最早由Anderson[63]提出.2013 年,Larson 等[64]首次基于大地测量型接收机的SNR 数据,使用LSP 分析成功测量了三个月内附近海洋的海平面变化.随后大量学者开展了研究,如针对经典反射信号模型的静态条件,引入海面动态变化改正,修正反演误差.Larson 等[65]利用阿拉斯加一处海面日变化超过7 m 区域的GPS 站点为期一年的数据,对考虑水面动态变化的新模型进行验算,反演结果与实测数据相比日平均偏差约为2.3 cm;该模型中的改正项部分需要用到反射高度变化速率这一未知参数,因此目前主要通过后期拟合水位反演结果的方式来计算并扣除改正项[66-67].此外,Roussel 等[68]提出了一种基于最小二乘的改正算法,这两种方法也是现在主要使用的动态改正算法.Strandberg 等[69]提出了一种基于非线性最小二乘(NLS)和b样条函数反演海平面的模型,并利用沿海GNSS 站数据进行了验证,实验表明该算法比经典的谱分析方法提取海平面精度更高.2019 年Strandberg 等[70]又提出了以卡尔曼滤波进行实时的海平面变化估计.但当潮差较大时,测站无法正确估计海面高度,致使NLS 估计过程中求解器收敛到局部最小值.面对这一缺陷,Reinking[71]使用基于区间分析的全局优化来拟合趋势SNR 数据,发现与频谱分析相比,精度和计算时间都有所提高.Purnell 等[72]引入了LSP 分析来提供一个粗略的高度初始估计,消除了对初始高度估计的依赖.Liu 等[73]提出利用差分进化算法来解决海面高度的局部收敛问题,使GNSS 反射测量在潮汐动力较大的情况下始终保持较高的稳定性和精度.实验结果如图10 所示,可以看出,SC02 站与GTGU 站点的动态是不同的,反演结果与测潮资料吻合较好.另外,受大气折射的影响,GNSS信号的传播路径会发生弯曲,从而使得反演的高度偏小[74].Santamaría-Gómez等[75]通过布设侧天线,添加了对流层改正,改进的卡尔曼滤波和平滑算法的处理,可以获得均方根(RMS)为3 cm 的结果.Williams等[76]使用对流层延迟模型和映射函数修正对流层延迟造成的偏差.

图10 SC02 和GTGU 站点估算的海面高度变化[73]
除了使用了GPS 数据,GNSS-IR 还使用不同的信号监测水位.Löfgren 等[66]对GLONASS 的反演性能进行了分析,与GPS 反演结果对比之后发现二者效果总体相当,但同一系统内不同信号的反演结果存在明显差别.此外,Jin 等[77]提出了基于SNR 观测值,利用北斗二号(BDS-2)的三频信号(B1I、B2I、B3I)进行潮汐监测;随着北斗三号(BDS-3)建设完成,Liu 等[78]分析了BDS 新信号的测高性能,结果证实了BDS 同样具有良好的水面测高能力.除了单独研究各系统的反演性能外,Wang 等[79-81]联合四大GNSS 系统的SNR 数据进行了水面高度反演试验,结果表明多系统融合反演能够有效提升水位测量结果的精度以及时间分辨率.
目前,GNSS-IR 水面高度反演的理论研究主要围绕海潮监测展开,相关的应用例如提取潮波系数[82-84]、反演风暴潮[85-86]等,也在进一步发展中.需要注意的是,上述研究也适用于内陆地区的水位反演.部分学者利用GNSS-IR 技术监测湖泊[87-90]、河流[91-93]、水库[94]等环境的水位变化,同样取得了比较理想的反演效果.
3 GNSS-IR 遥感发展展望
随着新一代GNSS 的日益完善、数据挖掘技术的快速发展、时空大数据的愈加丰富、航空和空间信息技术(包括通信、导航和遥感)不断发展的背景之下,GNSS 遥感技术结合了GNSS 卫星导航和遥感技术的优势,具有监测面积广、时间分辨率高、全天候监测、实时自动化,能够充分利用GNSS提供的多频段信号信息等技术优势,在诸多行业及应用领域扮演着越来越重要的角色.尤其是近年来基于多路径效应影响的SNR 信息发展起来的GNSS-IR 技术,为环境地表监测提供了一种全新的监测手段.该技术兼具了主动雷达与被动辐射计的优点,与传统的卫星遥感手段相比,具有如下优势:
1)无需单独制造特定的发射机来主动发射遥感信号,且具有丰富的免费卫星导航信号源.未来GNSS的卫星总数将会多达上百颗.随着GPS、GLONASS、Galileo 和BDS 全球四大导航系统的不断完善与更新,以及更多新的区域增强系统的组建,GNSS-IR 技术将会有更加丰富的数据实现高时频、高精度的地表参数提取.
2) GNSS-IR 技术不需制定单独的接收机接收遥感信号,仅需要一台大地型测量接收机便可对地表物理参数进行反演,且接收机为单频、双频或多频、单系统、双系统或多系统均可.因此,空间信息用户可以借助遍布全球的GNSS 连续运行跟踪站来进行地表物理参数反演,弥补了常规仪器和卫星雷达监测地表环境在空见分辨率上的不足,进而发挥GNSS 在全球环境变化监测中的重要作用,为创建全球GNSS 地表环境监测网络提供了可能.
3) GNSS 卫星所用的载波位于微波的L 波段,受大雾和雨雪等恶劣天气的影响较小,且能够穿透云层,对土壤湿度和雪水含量特别敏感.这有利于实现长期稳定、全天候的观测,也使GNSS-IR 技术的应用范围十分广泛.
这项日益受关注的新技术被广泛应用的同时也存在一些挑战,如需要对GNSS 信号在大气层中的传播和地球表面的反射进行精确建模并了解地表粗糙度对反演精度的影响.这需要详细了解大气条件和地表环境特性,以及对GNSS 信号和不同环境之间复杂的相互作用进行精确建模.总体而言,为实现GNSS-IR技术在更多领域的应用,研究人员需开发新的硬件和软件,并探索如何进行更精确的反演处理,以提高技术的准确性和可靠性.此外,研究人员还需要设计和优化相应的算法和数据处理流程,以提高GNSS-IR技术的可靠性和实用性.未来,GNSS-IR 技术的应用范围和精度必将得到进一步的提高,该技术也将进一步弥补常规测量仪器和雷达微波遥感在地表环境监测方面时间或空间分辨率不足的问题,进而发挥GNSS 遥感在全球环境变化监测中的重要作用.因此,对GNSS-IR 技术的研究,不仅仅是GNSS 在遥感领域的理论创新,其在环境监测方面的应用以及预测自然灾害的潜力更是让人期待.
致谢:感谢UNAVCO 运营的美国“地球透镜计划(Earth Scope)”中板块边缘观测PBO 网络提供的数据(http://www.earthscope.org),以及Kristine Larson,Carolyn Roesler,Berkay Bahadur 等提供的开源MATLAB 代码.