基于GNSS-R 的移动目标探测技术研究
2023-07-31朱鹏飞朱庆林董翔孙明晨
朱鹏飞,朱庆林,董翔,孙明晨
(中国电波传播研究所,山东 青岛 266107)
0 引言
作为一种无源雷达,全球卫星导航反射信号(GNSS-R)系统自身不发射能量,而是利用目标反射的电磁信号对监测区域内的目标进行探测.相比于主动探测雷达,无源被动雷达具有以下优势:首先,不需要向外发射能量,本身耗能小,同时不易被其他电磁信号探测设备探测到,战场生存能力强;其次,具有功耗低、尺寸小、维护成本低等特性,能够安装在主动雷达无法安装的位置;再次,具有双基地雷达的特性,能够对隐身目标进行探测;最后,具有成本低、安装限制少等特性,能够进行站网式布置,对民用滑翔飞机、无人机等目标进行监测.而全球卫星导航系统(GNSS)信号作为一种无源被动雷达信号源,具有其他信号源不具备的优势.首先,GNSS 信号具有全球覆盖、全天时、全天候工作、信号源丰富、信号结构公开等优势;其次,相比于全球移动通信系统(GSM)、数字视频广播(DVB-T)等信号源,GNSS 信号源更加丰富.全球四大导航系统美国的GPS、俄罗斯的GLONASS、欧洲的Galileo 和我国的北斗卫星导航系统(BDS),每个单独的导航定位系统均能够在任意时刻提供6~8 颗可视卫星[1].另外,作为一种微波信号,GNSS 信号能够穿透密林等遮挡,在云、雨、雾等天气仍能正常工作.
自1993 年Martin-Neria 首次提出GNSS-R 技术理论[2],该技术经历了三十年的发展.起初,GNSS-R技术主要用于海洋遥感,而在该领域已经具有了比较成熟的研究,在海面高度测量[3]、海面有效波高[4]、海面风场[5-6]、海水盐度[7]、潮汐探测[8]等领域已得到广泛应用.随后,在陆面遥感方面,如土壤湿度[9-10]、积雪厚度[11]、植被覆盖[12]等参数的遥感也逐渐取得众多突破性进展.随着我国北斗三号卫星导航系统(BDS-3)的全面建成,其完备的星座构成及良好的信号质量为GNSS-R 遥感提供了更加优越的硬件基础.
近年来,基于GNSS-R 的目标探测技术逐渐成为新的研究热点,探测目标主要分为海洋目标、陆地目标以及空中目标三大类.其中,海洋目标探测主要针对海冰、油污、浒苔以及大型船舶等海上漂浮物[13-15];陆地目标探测主要针对建筑物、车辆等[16-17];空中目标探测主要针对飞机等目标[18].本文基于GNSS-R信号遥感探测区域表面形状特性变化的方法,进行移动目标的探测.相比与其他探测方法,该方法能够得到较为准确的目标位置与高度信息,能够对目标类型进行初步判定.
1 反演算法原理
1.1 信号传播模型
GNSS-R 信号接收系统有两个GNSS 信号接收天线,前者利用右旋圆极化(RHCP)天线接收来自导航卫星的直射信号,后者利用左旋天线接收经过地面反射后的信号.地面为较粗糙的GNSS 信号反射面,GNSS 信号经过地面反射后极化特性变为左旋圆极化(LHCP),由于极化特性的变化,直射与反射信号接收天线接收到的信号互不干扰.同时,由于两个天线距离近,可以忽略不同路径传播造成的电离层延迟和对流层折射效应.因此与自身信号唯一不同的是,反射信号经过目标区域的反射,信号中携带了目标探测区域的物理特征信息,本文主要对探测区域的高度特征进行监测.信号的传播模型如图1 所示.

图1 信号传播模型
从图1 可知,由于GNSS 卫星距离地面非常远,可以将传播到地面的GNSS 卫星信号视为平行信号进行处理,根据镜面反射原理,反射信号相对于直射信号的路径延迟为
式中:H为接收机高度;ϕ 为入射信号与地面的夹角(卫星仰角);τ 为反射信号相比于直射信号的延迟时间;c为光速.
探测区域与天线的高度差为
式中,L0为目标进入前直射信号与反射信号的路径延迟.
如图2 所示,当目标进入探测区域后,镜面反射点位置发生变化,探测区域高度为
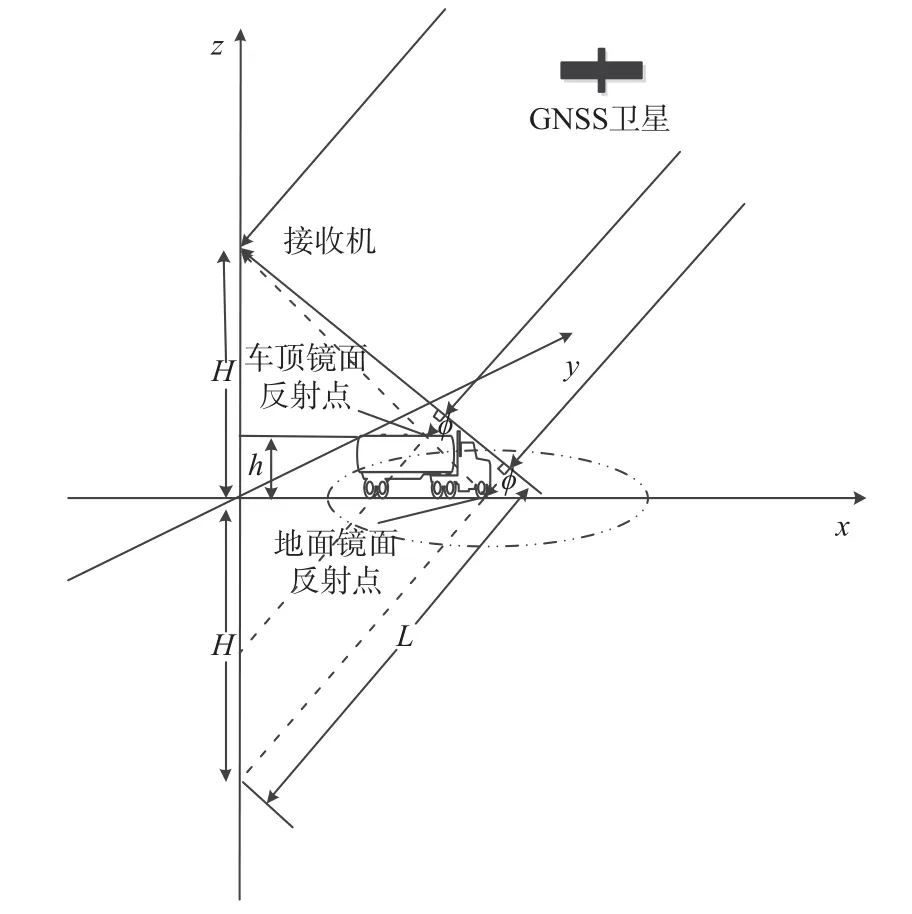
图2 目标进入探测区域后信号传播模型
式中:h为移动目标顶部相对于基准面的高度;L为目标进入后直射信号与反射信号的路径延迟.
1.2 信号处理流程
两路信号接收天线接收到GNSS 信号后,经过前端射频模块进行滤波、下变频、功率放大、A/D 采样等处理,得到数字中频信号,表达式为
式中:Ps为信号功率;C(t) 为CA 码,其值为±1;D(t)为导航电文比特;τ 表示传输过程中造成的时间延迟;ωIF为中频载波频率;φ(t) 为 初始载波相位;n(t) 为白噪声.
对直射信号数字中频信号进行捕获、跟踪处理,得到当前时刻的码相位、多普勒频移等信息.基于直射信号码相位和多普勒频移信息产生本地载波信号与伪码序列,并将本地信号与反射中频信号进行相关处理.
数据处理流程如图3 所示.
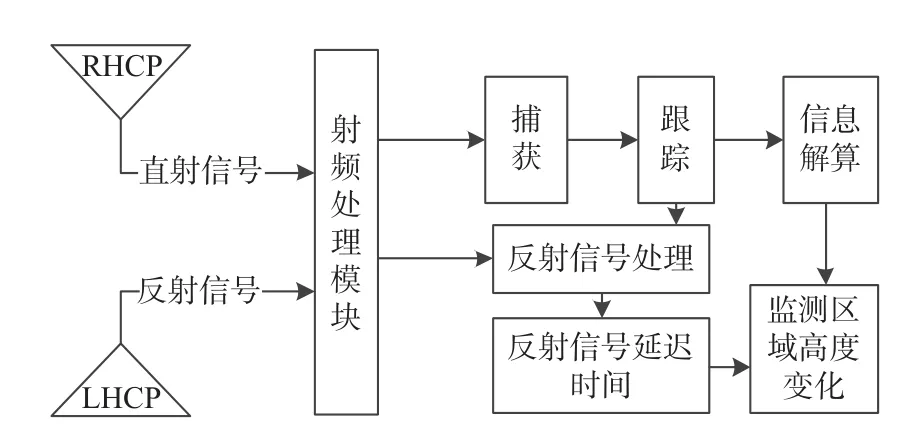
图3 信号处理流程
2 实验验证
2.1 实验场地
由于在山东青岛地区BDS 卫星数量多,且多位于南方向,为了取得更好的实验效果,选择南侧空旷的实验场地进行实验,实验地点位于青岛市城阳区某酒店楼顶,酒店坐北朝南,为一个三层建筑,建筑高度约为14 m,建筑前方为汽车行驶通道与花圃,如图4 所示.

图4 实验场地实景图(正视)
将信号接收天线(直射信号接收天线朝向天顶方向,反射信号接收天线朝向汽车行驶通道)放置于酒店楼顶南向矮墙上,GNSS 中频信号采集器(将接收到的直射通道射频信号与反射通道射频信号通过滤波、放大、下变频及模数转换等处理转换为中频数字信号)与数据处理主机(用于设置接收信号频点、采样率、存储位置、存储数据大小与时长等信息,并存储中频数据)放置于酒店楼顶中央位置.其中信号接收天线与GNSS 中频信号采集器之间使用10 m 长的射频线缆连接,GNSS 中频信号采集器与数据处理主机之间使用USB3.0 数据传输线连接,实验场地布置如图5 所示.

图5 实验场地示意图(俯视)
2.2 实验设备
实验设备包括直射信号接收天线、反射信号接收天线、GNSS 中频信号采集器、数据处理终端、实验车辆以及其他连接线缆等,如图6 所示.其中直射信号接收天线为RHCP 有源天线,直流供电电压为5 V,仰角90°方向增益为6 dB,仰角20°时增益降低为0 dB;反射信号接收天线为LHCP 有源天线,直流供电电压为5 V,仰角90°方向增益为5.5 dB,仰角20°时增益降低为0 dB;GNSS 中频信号采集器为双通道GNSS 信号同步采样设备,支持 10 MHz、20 MHz、40 MHz 三种采样频率,采样制式为I/Q 正交采样,支持 4 bit 和8 bit 两种数据位宽;数据处理终端使用华为PC 机,型号为MateBook D,具有两个USB3.0 数据传输接口和一个USB2.0 数据传输接口,实验车辆高1.5 m、宽1.8 m、长4.5 m.

图6 实验场景
2.3 实验步骤
实验设备搭建完成后,打开数据采集软件(数据采集软件可以选择通道使能、数据采集频段、信号带宽、速率、数据位宽等).由于山东青岛地区可视BDS卫星通常情况下多于GPS 卫星,且BDS 信号带宽较大(测量精度高),设定采集频段为1 561 MHz,信号带宽为2 MHz,采样速率为40 MHz,数据位宽为4 bit.其中通道1 连接直射信号接收天线,通道2 连接反射信号接收天线,数据采集软件界面如图7所示.
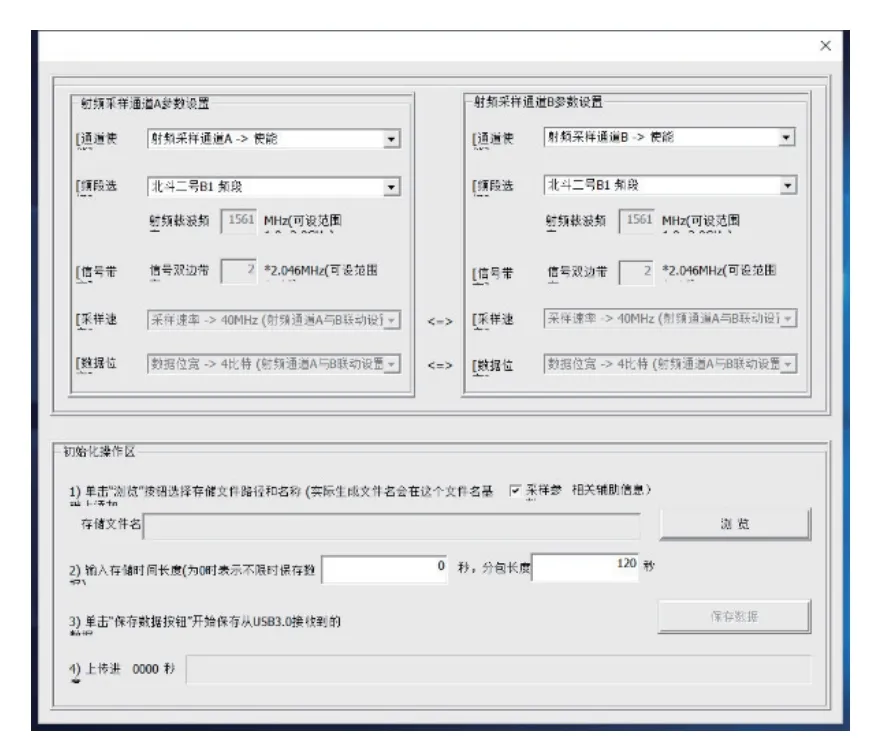
图7 数据采集界面
实验车辆沿酒店内部道路行驶,实验车辆共三次经过信号接收天线正前方.数据采集过程中,录制实验过程,视频录制时间对应数据采集时间,以便后期进行对应.
2.4 实验数据处理
对接收到的GNSS 信号进行处理,得到实验位置BDS 卫星星空分布图,如图8 所示.

图8 BDS 卫星星空图
BDS 星空图结合场地实际情况,选用镜面反射区域位于汽车行驶通道的卫星信号,27、28、40、30 号卫星均位于北向,无法满足实验要求,7、8、38、46 号卫星仰角较大,镜面反射区域位于酒店门口,即汽车无法行驶到达的位置,60、2、13 号卫星镜面反射区域位于右侧停车场区域,1、59 号卫星镜面反射区域位于花圃中,只有3 号卫星镜面反射区域位于汽车行驶通道位置.这里使用BDS-3 卫星作为信号源.表1 为根据数据处理得到的BDS-3 同步卫星仰角、方位角信息计算得到的天线高度及镜面反射区域信息.

表1 导航卫星仰角与方位角
经过计算,得到镜面反射区域位置,通过查看实验视频,得到车辆经过镜面反射区域的时间分别为60~78 s、117~135 s、180~205 s.
2.5 实验结果
数据处理过程中,为获得更加详细的高度信息,每秒钟对监测区域进行8 次高度测量,实验处理结果如图9 所示.

图9 数据处理结果
由图9 可知,在目标进入探测区域后,反射信号相对于直射信号的路径延迟发生了明显变化.实验结果中出现路径延迟变化的时间段与实验记录中目标进入探测区域的时间段一一对应.去除数据中野值信息,平滑后路径延迟为2.24 m,经过计算,目标物体高度为1.516 m、误差为1.6 cm.由于轿车高度通常为1.4~1.6 m,SUV 汽车高度通常为1.7 m,公交车高度通常为2.5~3.5 m,可以初步判断出移动目标类型为轿车,与实际情况相符.
由于接收天线经纬度已知,以天线坐标为基准,计算目标位置坐标.目标经纬度坐标为:
式中:L为目标与测量天线之间的距离;β 为卫星仰角;θ 为目标方位;R为地球半径;α 为天线位置纬度.
经过计算,目标位置为(36°14′34.544 9″N,120°24′40.498 1″E).
3 结束语
基于GNSS 信号的反射特性,本文提出了一种利用信号传播路径延迟探测移动目标的新方法.通过分析GNSS 卫星、探测区域与接收天线之间的几何构型,并利用直射通道捕获跟踪信息作为参考提取直反射通道信号相位延迟,对监测区域高度特征进行计算,分析探测区域是否出现移动目标.并进行了验证实验,实验结果表明,该方法能够有效进行移动目标的探测并精确计算目标高度及位置信息.