基于电磁动滑轮驱动与光反馈仿人手研究
2023-07-27郭润坤
郭润坤
(山西机电职业技术学院机械工程系,山西长治 046011)
0 前言
机械仿生手维护便捷性、对外部信息感知能力是实际应用中较为关键的考量点。根据人手进化特征,各国研究人员进行了深入研究,并推出各具特色的拟人化仿生手[1-2]。然而,随着技术迭代创新与应用场景的扩展,机械手在模块化、低成本化、触觉感知等方面仍具有较大的研究价值[3-4]。
机械人应用场景不断扩展,机械手操作的环境愈加复杂、操作对象愈加多样化,对机械手本体与环境的友好适配性、与操作对象安全匹配性提出了更高的要求[5]。但对机械手来说,应对形状多变、尺寸不定的目标物,具有较大的挑战。经过多年研究,机械手在负载能力、结构优化等方面得到了极大的改进,欠驱动式柔顺拟人化机械手推广逐渐扩大[6]。
博洛尼亚大学研究的DEXMART机械手,自由度与人类手部相当[7],但控制系统化和结构相当复杂。欠驱动模块化手指设计,可以极大提高手指维护的便捷性,实现更好的包络抓取[8]。郭语等人[9]采用弹性卷筒式结构设计了一种柔性驱动模块,具有空载速度快、柔性加载的特点。LI等[10]制作了由3个连杆驱动的机械手。REIS等[11]提出一种基于弹性肌腱连杆的三指自适应机械手,但是由于缺乏感知能力,人机交互性较差。
在触觉感知方面,基于表面纹理识别原理,Venter等开发了一种触觉传感器,对机器人在抓持操作时物体滑动进行检测[12]。丛明等人[13]用一种气压式触觉阵列传感器拾取触觉特征信息,能够有效感知抓取分类过程中的触觉信息变化。
本文作者设计一种基于电磁动滑轮驱动的仿人手,通过电磁动滑轮结构,实现一个驱动电机对5根手指的独立驱动,并且双级钢丝绳驱动结构提升了手指对物体形状自适应能力。通过对弹性光感装置设计与特性研究,建立了光强与负载力和角度的关系模型,实现对手指关节信息反馈。
1 仿人手结构设计及制作
人类手部结构特征经过长期进化,可以运用33种抓取模式来应对复杂抓取环境和多变目标物[14]。采用双级钢丝绳环绕式电磁动滑轮驱动结构,提升了仿人手与人交互安全性,同时仿人手更加轻便和紧凑。大拇指结构采用双自由度设计,增加其运动灵活性,可以满足对常规物品的抓取要求。图1所示为制作的仿人手样机。

图1 仿人手样机
机械手的设计目的在于代替人手执行复杂、重复、危险的任务,同时需要满足人机交互的友好特性。仿人手除大拇指外,每个手指具有2个活动关节,分别为近指节和耦合指节,参数如表1所示。

表1 仿人手参数
1.1 结构设计
人手在实际操作时,很难独立控制远指关节,主要是随中指节一起同步耦合运动。因此,结合操作实际对手指结构进行了简化,即将手指原有的远指关节和中指节,简化成具有固定夹角的耦合指节,耦合指节在结构上仍具有远指节和中指节两个指面结构,以实现对物体更好的包络。
手指采用类似人体肌腱驱动方式,图2所示为食指结构。手指结构主要由手指关节、弹性光感装置、关节轴承、驱动钢丝绳和动滑轮系统组成,其中手指关节的复位力由弹性光感装置提供,其内置的弹簧结构可以提供持久、稳定的弹力,有效改善手指关节在初始状态的松弛问题。

图2 食指结构
在执行抓取操作时,拇指与其他手指配合关系可以概括成三类:第一类是较为精细的对夹配合;第二类是粗犷的包络式抓取;第三种是拇指与食指间的侧捏配合。为同时具备以上抓取能力,对大拇指进行了特殊设计,使其具备侧摆和弯曲两个独立自由度。图3所示为大拇指结构,大拇指根部关节允许活动角度范围为0~120°,大拇指的侧摆功能使仿人手能够在精准抓取、重载抓取、侧抓取模式间自由切换,提升了仿人手实际应用价值。

图3 大拇指结构
手掌作为手指的载体,其内部空间布局对仿人手整体一致性和驱动控制极为重要。手掌采用3D打印制作,手腕处设有与其他部件连接的法兰结构。手掌内部集成了电机驱动装置及各个手指的动滑轮传动系统,其中大拇指具有侧摆和弯曲驱动两个动滑轮系统。图4所示为掌内空间布局。

图4 手掌内部结构
各手指驱动十字动滑轮与手掌间设有电磁制动机构,十字动滑轮两侧有导向翅,有效防止动滑轮倾斜、旋转。电机驱动和手指驱动的双级钢丝绳在动滑轮上呈十字垂直交错,运动时互不干扰。电磁动滑轮结构及控制原理如图5所示。十字动滑轮底部设计有电磁线圈,手掌内部在动滑轮运动方向设有铁质制动板,电磁线圈底部和制动板顶部有对应的凹凸纹理,提升制动效果。初始状态时,十字动滑轮底部的电磁线圈与手掌内制动板间无磁力作用,两者悬空不接触,十字动滑轮可自由运动;当给电磁线圈通电时,电磁线圈的磁力克服制动板底部的弹簧力,使制动板与电磁线圈吸合,由于制动板只能上下移动,不能平行移动,此时十字动滑轮与制动板结合,处于制动状态。

图5 电磁动滑轮控制原理
参照国家标准GB 10000—1988[15]对仿人手结构尺寸和手指功能进行设计,参数如表2所示,表中O代表耦合指节,M代表近指节,G代表根指节。
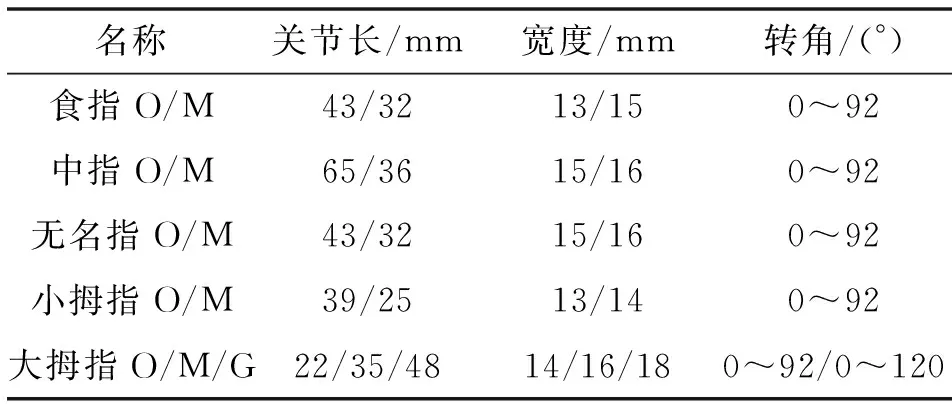
表2 手指参数
1.2 传动系统设计与分析
腱绳欠驱动结构具备独特的传动优势,在保证驱动安全性下提升手指对物体外形的自适应能力,同时驱动装置与手指关节的分离,降低了手指设计复杂度,提升了手指转配和维护的便捷性。
为提升仿生手整机结构的协调性和美观性,将手指的驱动结构设置在手掌内部,手指结构仅作为驱动钢丝绳传动功能,钢丝绳的两端分别固定在耦合指节和近指节内部,中间绕过手掌内的十字动滑结构,当十字动滑轮平移滑动时与两个手指形成动滑轮组,可使两个手指节根据外界负载力的不同进行被动重新力分配,提高了非均匀受力时双关节对物体抓握所需的适应性。单根手指传动系统如图6所示,驱动腱绳采用直径0.8 mm、7×7结构的包塑钢丝绳,它具有较好光滑度、柔韧度及拉伸载荷,负载能力可达10 kg。

图6 手指传动示意
手掌内各个手指的十字动滑轮通过一级钢丝绳绕行连接,钢丝绳两端分别串联弹性光感装置后与手掌结构进行固定。掌内一级驱动钢丝绳在掌内串联的弹性光感装置与手指关节内置的弹性光感装置的弹力作用下保持预张紧状态。在掌内弹性光感装置的自由端设置了行程限位挡板,可以防止在驱动过程中弹性光感装置被过度拉伸而损坏。丝杆电机带动主驱动滑块位于手掌中间位置,当主驱动滑块移动时,由于一级驱动钢丝绳两端分别与手掌进行连接固定,手指的6个十字动滑轮进行收紧滑动。由动滑轮原理可知,绕行在不同动滑轮上的一级驱动钢丝绳张力相同,在驱动过程中,每个十字动滑轮受到一级驱动钢丝绳的竖向驱动拉力相同。以电机驱动力为F进行受力分析,当系统为理想动滑轮系统时,一级钢丝绳上的张力为1/2F,则十字动滑轮上得到的手指驱动拉力为F。手掌内动滑轮系统绕线及受力分析如图7所示。
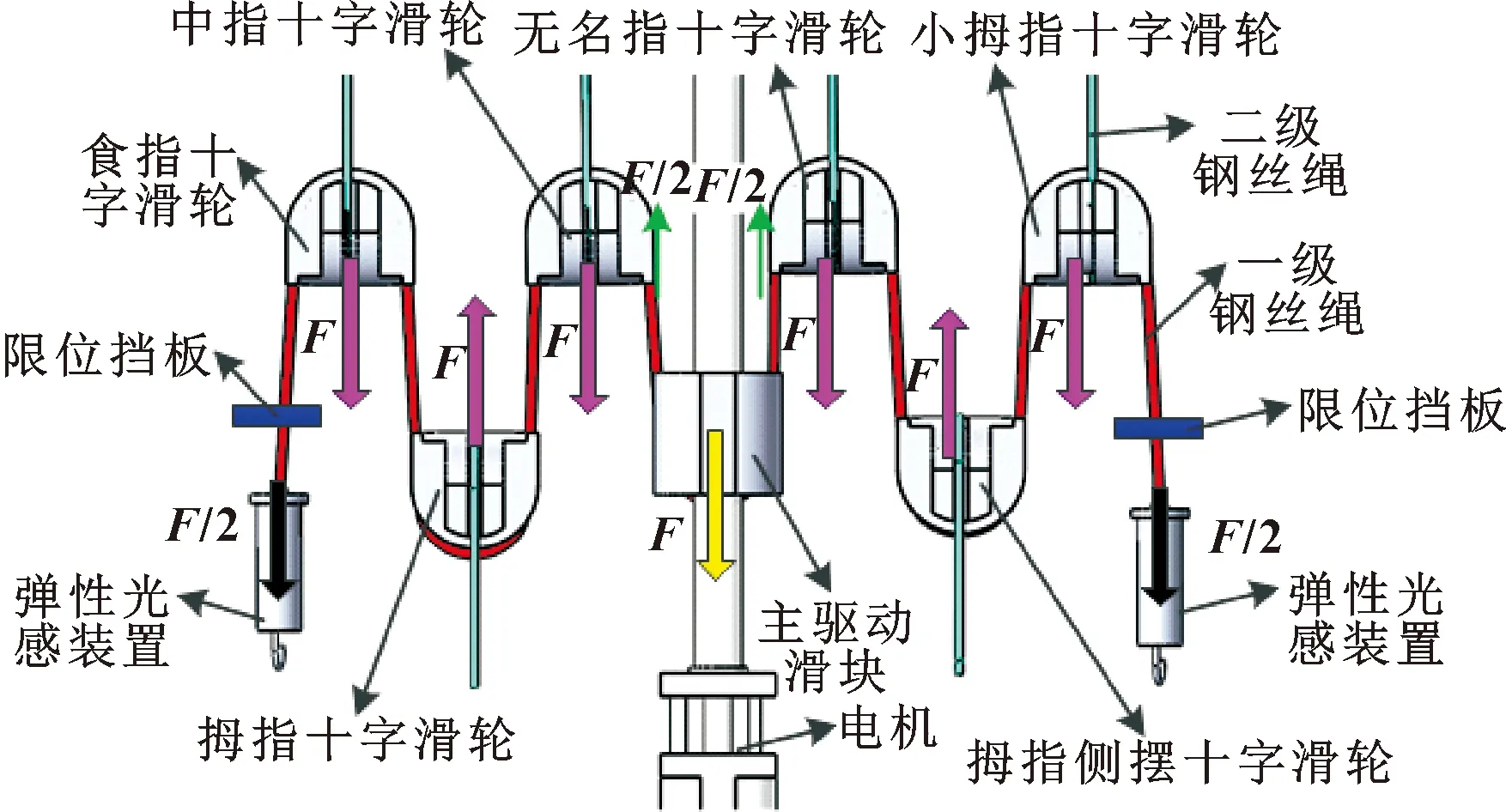
图7 动滑轮系统传动分析
结合手掌与手指传动系统对仿人手的驱动过程进行阐述。以图8为例说明手指驱动过程,食指和拇指驱动时,手掌内其余三指的十字动滑轮上的电磁线圈通电,在电磁力作用下,掌内对应的制动板与十字动滑轮接触,在摩擦力作用下十字动滑轮结构与手掌相对固定,其功能由动滑轮状态转变为静滑轮,电机主驱动滑块与食指十字动滑轮构成动滑轮系统,当电机驱动时,食指在对应的十字滑轮驱动下带动手指内部驱动钢丝绳进行驱动。
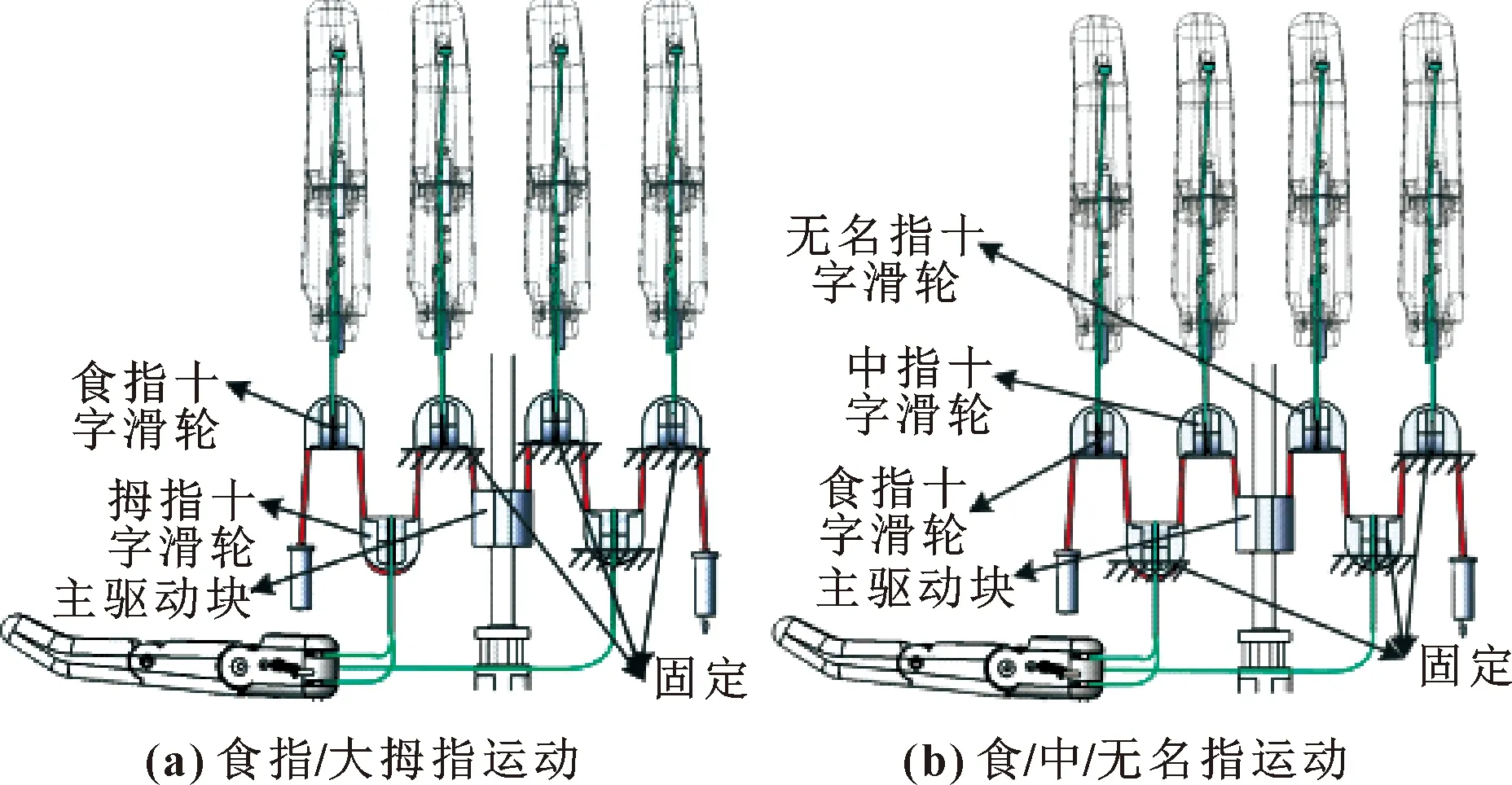
图8 不同手指运动传动结构示意
2 仿人手反馈系统研究
2.1 弹性光感装置原理及结构设计
光在传播过程中衰减受光源特性、传播路径特点、介质特性等影响。通过对影响光强传播因素进行可控变化,实现对特定影响因素的表征。研究中保持光源和传播介质特性一致,通过传播路径变化对光强衰减特性进行研究,从而建立传播路径特征与光强的数学模型。
根据手指在运动过程中关节柔性弯曲和肌肉伸缩的运动特点,提取与光传播路径相关的特征因素。因此弹性光感装置结构体需要具备体积小、可任意角度弯曲、可被拉伸和自动回弹的特点,同时集成光源和光强感受器。不锈钢弹簧具有弹力稳定、可伸缩和弯曲变形,且撤去外力后可自动回复到初始转态,是弹性光感装置的主体结构。
弹性光感装置不仅是手指运动信息反馈的传感器,同时也是手指驱动结构的组成部分,用于提供手指弯曲后的复位力。弹性光感装置组成结构如图9所示,主要有不锈钢弹簧、弹性胶管、光感受器、光源。结合手指关节尺寸和弹簧强度,手部选用直径为3 mm不锈钢弹簧,手掌内选用直径为6 mm的不锈钢弹簧,通过线径不同区分弹簧刚度。光敏电阻的阻值与光照强度有直接关系,且光照越强,电阻越小,可以检测光线传播路径变化导致的光强变化,因此光感受器选用光敏电阻,峰值波长约为520 nm。根据光敏电阻光谱响应曲线,选用绿色发光二极管,其波长范围520~525 nm。

图9 弹性光感装置不同状态示意
当弹性光感装置不受外力时,保持平直状态,发光二极管与光敏电阻面面相对。当弹性光感装置受到垂直于弹簧的中心轴线方向的拉压力时,弹性光感装置被拉伸或压缩,此时发光二极管至光敏电阻感光面的距离发生变化,由此引起光线强度变化被检测以表征轴向变化特征。当弹性光感装置受到弯曲作用力时,发光二极管与光敏电阻感光面产生角度,光线传播路径由直筒式结构变为弯曲路径,光线在传播过程中在装置内侧的硅胶界面上发生反射和吸收损耗,由此引起的光线强度变化被检测以表征装置弯曲状态下的特征。
2.2 关节转角表征研究
基于设计的弹性光感装置实现对手指关节转角的表征,搭建如图10所示的测试系统平台,采用外力使手指克服弹性装置的回弹力,使关节保持在特定转角,对不同角度下对应的光敏电阻数据进行采集整理。

图10 手指关节测试系统
为使手指弯曲运动时符合人手动作顺序,使手指近指关节处弹性光感装置中不锈钢弹簧刚度小于耦合指节,以保证在无负载驱动时,手指关节按照先近指节后耦合指节动作顺序。手指关节在不同角度下独立测试10次,取平均值整理光强测试模拟值与关节转角的关系如图11所示。
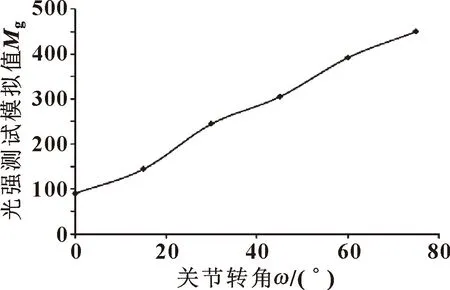
图11 转角ω与光强测试模拟值Mg关系
对测试数据进行拟合处理,得到手指关节转角与光强测试模拟值拟合方程如式(1)所示。
(1)
式中:ω为关节转角,(°);Mg为光强模拟值。
2.3 指面压力表征研究
针对传统薄膜式压力传感器在应用中的不足,通过对手指传动系统受力进行研究,得到手指关节在不同转角时二级钢丝绳实际有效拉力,通过关节传动特性分析,从而实现对指面压力的表征。单手指关节受力分析如图12所示。

图12 手指关节受力分析
由图12分析可知当手指在外界负载力下保持相对静止时,关节转矩有以下关系:
Tq=Tt+Tz
(2)
Tz=Fi·Li
(3)
Tq=F/2·ri
(4)
Tt=Fso·ri
(5)
则耦合指节和近指节的有效指面力公式如下:
Fo=(F/2-Fso)r1/L0
(6)
Fj=(F/2-Fsj)r2/L1
(7)
式中:F为一级驱动钢丝绳张力,N;Fo为耦合关节有效指面力,N;Fj为近指关节有效指面力;r1为耦合关节驱动半径,m;r2为近指关节驱动半径,m;L0为耦合指节外部相互作用力有效力臂,m;L1为近指节外部相互作用力有效力臂,m;Tq为关节驱动扭矩,N·m;Tt为关节弹性损耗扭矩,N·m;Tz为负载作用扭矩,N·m。
弹性光感装置内嵌于手指关节中,其弹性反作用力随关节转角的增大而增大。为得到关节在不同转角下对应的损耗力,由于各个手指关节的驱动结构类似,以单根手指为例进行说明,通过如图10所示的关节测试系统平台,对手指的两个关节不同角度下的损耗力分别进行独立测试。
手指驱动的二级钢丝绳与拉力计连接,通过移动拉力计使手指关节转动到特定角度并保持稳定,此时负载拉力与弹性光感装置复位作用力、关节摩擦力等综合损耗力相互抵消,记录不同关节转角对应的负载拉力。对两个手指关节分别进行10次测试,同时记录下不同转角位置时拉力计检测的数据,将测试数据取平均值处理后如表3所示。

表3 不同关节转角驱动损耗力
对表3中的测试数据进行拟合处理,得到不同转角时关节损耗力数学公式:
Fsj=4.643-4ω2+0.089 14ω+0.088 57
(8)
Fso=2.5-5ω3-3.179-3ω2+0.174ω+1.71-2
(9)
式中:Fsj为近指关节损耗力,N;Fso为耦合指节损耗力,N;ω为关节转角,(°)。
手掌内一级驱动钢丝绳两端串联的弹性光感装置用于检测驱动钢丝绳实时张力。通过在弹性光感装置下施加不同负载以模拟拉力,每组负载下测试10次,整理光强测试值与负载的关系如图13所示。
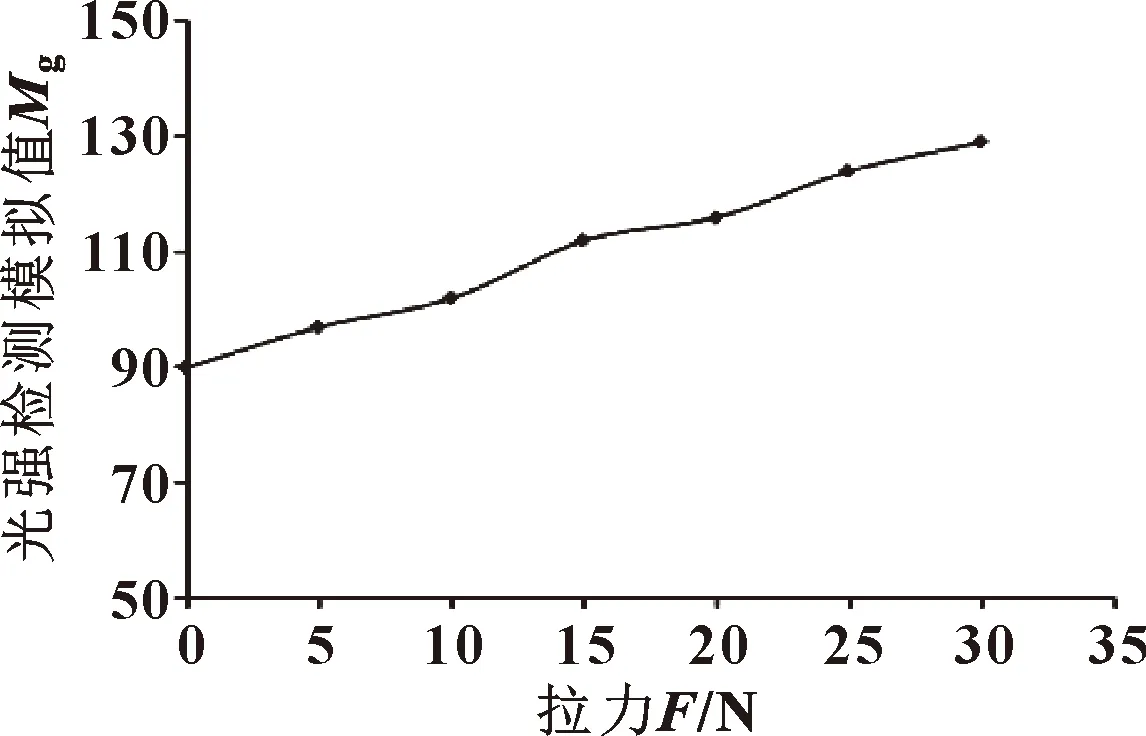
图13 直线拉力F与光强测试模拟值Mg关系
对测试数据进行拟合处理,得到一级驱动钢丝绳负载拉力与光强测试模拟值拟合方程:
(10)
3 抓取测试
搭建了如图14所示的测试平台对仿人手性能进行测试,测试平台主要由电源、仿人手样机、控制系统组成。仿人手样机固定在一个可垂直升降的移动台上,以模拟仿人手自主抓取状态。

图14 仿人手抓取测试平台
通过实验对仿人手的运动特性进行分析,对每根手指关节复位刚度进行调整,使手指近指节优先运动以符合人手运动规律。通过对运动过程中的弹性光强检测装置数据进行检测,以表征手指关节是否运动结束。通过对电磁制动装置的控制使仿人手的5根手指实现不同运动匹配,实验过程中统一以根指节采集数据为对比基准,不同手指驱动个数时对应的数据曲线如图15所示。

图15 不同手指个数驱动时关节变化
从图15(a)可以看出:单根手指驱动时,手指的动态响应速度最快,约0.2 s内根指节达到限位驱动转角;当食指与中指同时驱动时,由于双指同时运动,由动滑轮的传动系统特点可知此时手指的运行速率降低为丝杆电机驱动速率的1/2。当5根手指全部驱动时,手掌内的5根手指的弯曲十字动滑轮全部处于驱动状态,此时每根手指的理论驱动速率降低至丝杆电机速率的1/6,由于各个手指间摩擦状态不完全相同,手指驱动过程中每根手指的驱动速率有一定差异。随着参与操作任务手指个数的增加,手指运动的响应速率逐渐下降,但在多手指协调抓取任务中可以通过对同时驱动手指个数进行分阶段调配,实现少数手指与目标物的快速接触进行定位和预抓取,然后快速驱动其余手指全接触实现强力包络抓取。
为了评估仿人手关节自适应能力,将部分手指关节用外力限制,对其他手指关节的运动情况进行测试。如图16可以看出:对任意手指的外力限制并不会影响其他手指的运动,且单根手指的两个关节可根据外力不同进行自适应的姿态匹配,对形状复杂物体具有较强的抓取自适应能力。

图16 仿人手自适应能力测试
为更好地测试仿人手实际使用性能,对其进行较为全面的测试评估,将生活中一些常见的物品,如银行卡、指甲钳、螺丝刀、喷雾剂、薯片、苹果等作为抓取测试对象。将测试物体放在抓取点,控制仿人手上下移动到预设高度,当物体被稳定地抓住后,仿人手向上移动使物体脱离支撑面并在空中保持45 s,且物体没有滑落,判定抓取成功,否则判定抓取失败。图17所示为仿人手对常见物品的抓取测试。

图17 抓取测试
4 总结
设计一种新颖的仿人手结构,在手掌内设置电磁式动滑轮系统,配合电磁控制机构,实现了单一驱动电机对5根手指6个自由度的独立驱动控制,得益于动滑轮驱动系统,电机驱动力在手指驱动中得到最大化应用。手指采用钢丝绳回绕驱动方式,使每个关节具有驱动的相对独立性,且双关节间可根据负载情况被动进行形态自适应调节。通过研制弹性光感装置并对其光与力的特性进行研究,建立了基于光强反馈的负载力和关节转角的数学模型,改善了传统薄膜式压力传感器的不足,提升数据反馈的有效性,为仿人手结构设计和触感反馈研究提供借鉴。
