应用贪婪训练算法的装配机械手定位控制研究
2023-07-27杨坤平廉飞宇
杨坤平,廉飞宇
(1.嵩山少林武术职业学院信息技术系,河南 登封 452470;2.河南工业大学信息科学与工程学院,河南 郑州 450001)
1 引言
在智能化工业制造中,工业机器人[1-2]通常作为多自由度、多用途的操作机而被广泛使用。而装配式机械手作为工业机器人的典型代表,被用于装配生产线零部件装配生产中,其是集机械、微电子、自动控制等高精尖技术为一体的高科技产品。由于机械手的装配线上装配对象的位置通常是不确定的,机械手在确定装配零件位置时,需要依据视觉识别待装配物体方位,通过坐标的变换,将位置信息转换成关节角度,实现装配物体的精准装配,过程中对机械手的定位控制精度要求极为严苛。因此,机械手的定位控制就变得尤为重要。
当前已有相关学者对机械手的定位控制做出了一定的研究。例如:文献[3]方法提出基于PSO算法的串联机械手位置跟踪模糊PID控制。该方法通过机械手模型结构获取机械手动力学方程以及传递函数;再依据获取的相关参数设计机械手控制器,并采用PSO算法优化控制器参数;最后通过优化后的控制器实现机械手的定位控制。文献[4]方法提出基于逆运动学的柔性机械臂末端定位控制。该方法依据机械臂结构,获取机械臂末端空间与机械臂形态的逆运动学关系;再基于获取的运动学关系构建逆运动模型,制定定位控制方案;最后基于构建的定位控制平台实现机械臂的定位控制。文献[5]方法提出基于轨迹规划的平面三连杆欠驱动机械臂位置控制。该方法通过建立的动力学模型获取机械臂连杆位置目标角度;再依据驱动关节与次驱动关节之间的耦合关系,规划驱动轨迹;最后通过设计的滑模变结构控制器,实现机械臂的定位控制。
由于以上方法均采用位置惯性盲猜策略,未能在定位控制前获取机械手的运动学参数,导致上述方法在复杂路径定位控制时,效果较差。依据上述机械臂定位控制方法中存在的问题,提出应用贪婪训练算法的装配机械手定位控制方法。
2 装配式机械手的运动参数标定
2.1 装配机械手运动学分析
在装配机械手平台中,装配机械手[6]在执行装配任务时,运动方式通常是垂直方向的侧向运动,以及绕垂直方向的回转运动,从而有效实现零部件的装配。机械手主要由手臂、大臂、小臂、升降缸活塞缸等部件构成。其中,除伸缩臂以外,其他机械手关节上都装置转动运动副件,辅助机械手实现装配过程中旋转、摆动等动作。
基于上述机械手结构可清晰地了解机械手各个部件之间的连接关系,以及连杆运动支点、参考点,以此为基础,获取机械手的运动学方程。基于机械臂的结构分析结果,设定机械手的大臂、小臂、伸缩臂以及装配头的连杆为α0、α1、α2、α3,将大臂连杆作为坐标原点,其余连杆看作坐标支点,以此建立机械手的连杆坐标系,结果如下式所示:
式中:θ—机械手连杆之间的转角变量;Oα0—坐标原点;坐标轴方向标记Xα1、Yα2、Zα3形式。
坐标建立后,通过该坐标获取机械手连杆的齐次变换矩阵,获取装配机械手的运动学方程[7],过程如下式所示:
式中:D—装配机械手的运动学方程;B1B2B3B4—连杆α0、α1、α2、α3对应的齐次变换矩阵。基于上述获取的装配机械手动力学方程,获取装配机械手的关节变量。
依据现有的机械手动力学方程,设定大臂连杆α0转角变量为θ0,小臂连杆α1转角变量标记θ1,伸缩臂连杆α2的转角变量标记θ2,装配头连杆α3转角变量分别为θ3,以此获取机械臂的逆运动学解,过程如下式所示:
式中:β、ε—装配机械手的位置描述参数;l2—小臂连杆姿态参数;qx、qz、qz—机械手坐标的关节变量系数。
2.2 机械臂运动参数确定
基于上述获取的机械手运动学逆解[8],设定机械手的连杆转矩为δ,关节角为ϑ,连杆转角标记θ,机械手理论位置为P,以此获取机械手实际位置与理论位置之间的偏差值,构建机械手的运动参数标定模型,过程如下式所示:
式中:ΔP—机械手实际与理论位置偏差值;Δi—连杆长度偏差,Mi—长度偏差系数矩阵;Δχ—转角误差;Mχ—转角误差系数矩阵;Δδ—连杆偏差;Mδ—与之对应的系数矩阵;Δϑ—关节角误差;Mϑ—与之对应的系数矩阵。
3 基于贪婪训练算法的机械手定位控制
以上述确定的装配机械手运动参数为依据,通过设计定位控制算法获取机械手的位置误差、位置变化率,再通过设计的模糊PID定位控制器,实时调整机械手位置误差、位置变化率,从而实现机械手的定位控制。
3.1 设计定位控制算法
模型建立后,通过贪婪训练方法对模型展开训练,基于训练结果,确定机械手的运动参数。
依据分层训练原理,设定模型的第一层为γ1,模型的第i列标记,机械手参数标定模型的1层信号稀疏值用H1表述,以此获取模型的目标函数,过程如下式所示:
式中:f(x)—建立的目标函数;模型最小范数;
K—常数;模型数据。
基于建立的目标函数,获取模型第一层的训练结果,并以此为依据开展模型其他层级的训练,以此类推,直至获取所有的模型训练结果,通过整合完成模型输出值的获取,确定机械手的运动参数,过程如下式所示:
式中:S—模型输出;f(xi) —模型各层级训练结果。
由于机械手的工作环境多变,若机械手定位控制时线性误差较大,会直接影响定位控制效果,所以需要将模糊控制理论加入机械手固定参数PID控制中。定位控制时,控制器优先获取机械手运动变量参数,通过待控制参数与机械手当前状态对比结果,对机械手控制系统[9]的误差以及误差变化值模糊处理,通过建立的模糊控制规则,实现参数整定,实现机械手的精准定位以及快速响应。
设定机械手比例系数为TQ,积分系数为TI,误差累积为σ(i φi),以此获取机械手的控制系统输出值,过程如下式所示:
式中:TK—微分系数;误差变化值;u(t)—机械手的控制
系统输出值;t—机械手当前状态;i—常数。
基于上述计算结果,对机械手的相关系数实施整定处理,并依据整定结果,设定机械手定位控制器的外部输入值为o(t),控制器实际值为λ(t),以此获取机械手位置误差为σ(t)=o(t)-λ(t),误差变化率Δσ(t)=φσ(t)/φk。
3.2 控制器设计
将上述确定的机械手位置误差σ以及误差变化率σ%作为控制器的输入向量,获取机械手最佳调整关系,建立定位控制器的模糊控制规则。并以此建立定位控制器的传递函数,实现机械手的定位控制。
设定控制器电机的电枢电压为ya、yb,电枢电感为Dg,电阻为R,以此获取控制器的电机平衡方程,过程如下式所示:
式中:ia、ib—控制器的a、b相电枢电流;tη—反电动向量;ς—转子速度;Mr—齿数;k—时间。
基于上述获取的控制器平衡方程,选取I0为控制器额定电流,将转矩系数设定为vT,转动惯量表述U形式,并依据下式建立控制器传递函数:
式中:Hcd—控制器的传递函数;B—粘滞系数;l—常数。
基于上述建立的传递函数,通过机械手定位控制器对机械手位置误差以及误差变化率展开实时修正,依据输出的控制器修正结果,实现装配机械手的精准定位控制[10]。
4 实验分析
为了验证上述装配机械手定位控制方法的整体有效性,需要对此方法展开测试。采用应用贪婪训练算法的装配机械手定位控制研究(所提方法)、基于PSO算法的串联机械手位置跟踪模糊PID控制(文献[3]方法)、基于逆运动学的柔性机械臂末端定位控制(文献[4]方法)展开测试。装配机械手实际工作示意图,如图1所示。

图1 装配机械手实际工作示意图Fig.1 Schematic Diagram of Actual Work of Assembly Manipulator
4.1 实验结果及分析
机械手在定位控制时,定位控制方法的定位控制效果是检测方法优劣的关键。采用所提方法、文献[3]方法以及文献[4]方法开展机械手定位控制时,从机械手电机转速、电流值以及转角、转速误差几个方面,测试上述3种定位控制方法的定位控制性能。
4.1.1 机械手电机电流值检测
采用所提方法、文献[3]方法以及文献[4]方法开展机械手定位控制时,测试机械手电机输出电流值,测试结果,如图2所示。

图2 不同方法电流值输出测试结果Fig.2 Current Value Output Test Results of Different Methods
分析图2可知,所提方法在机械手定位控制后的电机电流输出结果与期望输出结果相接近,而经过文献[3]方法以及文献[4]方法定位控制后的机械手电机电流输出结果与期望输出结果相差较大。
4.1.2 机械手转速与转角误差测试
在机械手定位控制过程中,转速与转角的误差大小能够直接影响机械手的定位控制效果。采用所提方法、文献[3]方法以及文献[4]方法开展机械手定位控制时,测试上述3种方法定位控制后的机械手转速、转角误差,结果,如图3、图4所示。

图3 不同方法定位控制后的机械手转速误差测试结果Fig.3 Test Results of Manipulator Rotational Speed Error After Positioning Control by Different Methods
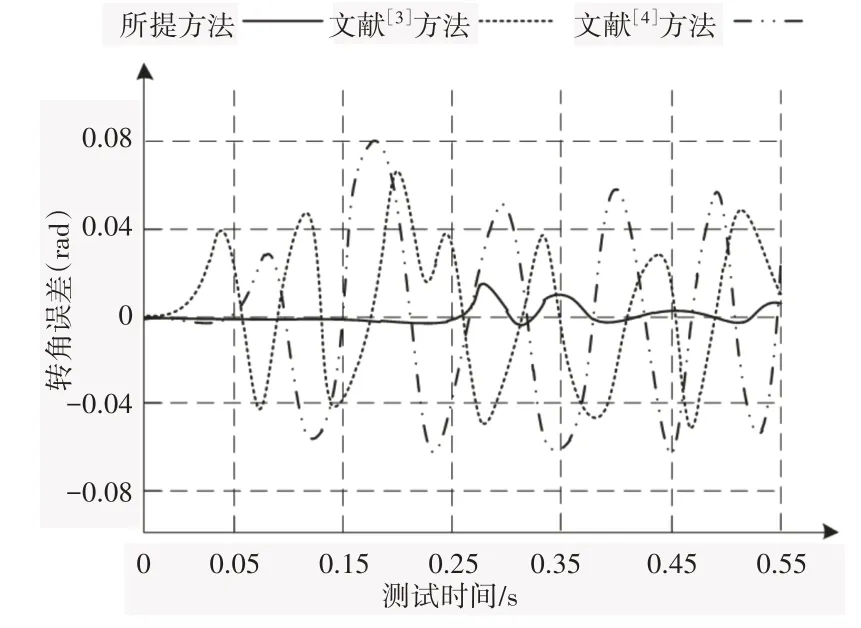
图4 不同方法控制后机械手转角误差测试结果Fig.4 Test Results of Manipulator Rotation Angle Error After Control by Different Methods
分析图3 可知,所提方法在定位控制后检测出的机械手转速误差能够有效控制在[ -2,2 ]区间内,而文献[3]方法以及文献[4]方法定位控制后测试出的机械手转速误差均大于所提方法测试结果。分析图4 实验数据可知,所提方法在机械手定位控制后,测试出的机械手转角误差能够有效地控制在[ -0.04,0.04 ]区间内,而其他两种方法测试出的机械手转角误差均高于所提方法的测试结果。这主要是因为所提方法在机械手定位控制前,基于机械手的逆运动学分析结果,确定了机械手的运动学参数,因此该方法能够有效检测出机械手的电机电流值。由此可证明,所提方法在机械手定位控制时,控制精度高于其他两种方法。
4.1.3 机械手转速测试
基于上述测试结果,继续对所提方法、文献[3]方法以及文献[4]方法定位控制后的机械手转速展开测试,以此验证上述3种方法的定位控制效果,结果,如图5所示。

图5 不同方法控制后的机械手转速测试结果Fig.5 Test Results of Manipulator Rotation Speed after Control by Different Methods
分析图5可知,机械手定位控制后,所提方法测试出的转速与实际转速无限接近,而文献[3]方法以及文献[4]方法测试出的转速与实际转速之间存在较大差距。由于所提方法提取了机械手的运动参数,能够实时获取机械手的运动坐标,因此机械手转速能够保持与实际转速一致,体现了所提方法优异的控制精度。
由此可证明,所提方法在机械手定位控制时,定位效果好。
5 结束语
随着装配式建筑的兴起,装配机械手在建筑时起到的作用变得越来越重要。针对传统机械手定位控制方法中存在的问题,提出应用贪婪训练算法的装配机械手定位控制研究。该方法依据机械手的运动分析结果,确定运动参数并以此为依据,设计定位控制算法以及模糊PID定位控制器。最后依据控制器输出结果,实现机械手的精准定位控制。该方法由于在设计控制器时,还存在一些问题,今后会针对该项缺陷继续优化该方法。