基于近似模型的重载仿生腿多目标优化
2023-07-14陈伟谭旭瑞杨阔刘昕晖
陈伟,谭旭瑞,杨阔 ,刘昕晖
(吉林大学 机械与航空航天工程学院,吉林 长春 130022)
大型重载六足机器人已逐步成为研究热点,在农业、工业等行业得到了快速发展和应用[1-2].大型机器人的高效、安全运行需要整机在稳定性、承载能力和系统复杂度之间取得比较理想的平衡,而单腿是整机与地面相互作用的媒介,腿部的静态强度、刚度和动态性能很大程度决定了整机的承载能力、越障能力和安全运行能力.因此,针对腿部结构的优化和轻量化设计具有重要意义,不仅可以实现腿部结构的轻量化和静动态性能提升,还可以带来“二次减重”,使六足机器人的动力系统也可相应地减轻质量.在相同工况指标下,腿部质量越轻,则所需要匹配的发动机的负荷就越低,不仅能降低功耗,还能有效改善足式机器人的多项性能.
目前,针对大型机械结构的优化设计主要包括拓扑优化、形状优化和尺寸优化等[3-4],但前两种优化方法由于对结构形状改变较大[5],极大增加制造成本和加工工艺,比较适合概念设计阶段.工程中应用更广泛的是对机械产品整体、结构和零件进行尺寸优化.牛文铁等[6]以机床关键结构设计参数为设计变量,静、动态性能为设计目标,对机床结构和质量取得较为理想的优化结果.闫利鹏等[7]利用近似模型技术和多岛遗传算法对高强钢盾构刀盘进行优化设计,在提升刀盘各项性能的同时,大大缩减了计算时间.以设计变量、近似模型和优化算法相结合的结构尺寸优化在车辆结构方面应用更为普遍,王登峰等[8]结合白车身弯扭刚度和振动频率等使用近似模型联合多目标优化算法为结构评价指标进行决策,并取得较好的轻量化效果.
大型六足机器人重载仿生腿结构作为一个复杂装配结构[9-10],包含众多尺寸变量和约束条件,因此,针对腿部结构进行多工况静、动态性能耦合的结构优化设计很少.多数对重载六足机器人仿生腿的结构优化仅考虑单一工况,未能体现仿生腿在复杂工况运行时多性能之间的制约关系.国内对大型重载机器人结构优化的研究很少,本文以重载机器人的仿生腿为研究对象,在多学科优化软件Isight中联合Abaqus中的有限元分析和CATIA中的参数化模型重构功能,依次利用试验设计、近似模型以及第二代非支配排序遗传算法(Non-dominated Sorting Genetic Algorithm Ⅱ,NSGA-Ⅱ)进行腿部各模块参数多目标优化.在优化过程中,将仿生腿拆解成基节、大腿和小腿模块单独优化,并且将设计变量具体细化到各模块中,可清晰地从近似模型中反映出改变某个变量对该模块输出响应的影响.并且选取六足机器人行走时承受载荷最大的中腿为研究对象,综合考虑斜坡和平地工况下的静、动态性能,避免优化结果与实际运行情况不符.
1 仿生腿性能分析与优化系统集成
1.1 仿生腿静力学与模态分析
图1 为大型六足机器人及其仿生腿结构.借鉴六足纲昆虫腿部独特的身体构造,保留根关节、髋关节和膝关节的旋转自由度,并将股节和胫节分别视为仿生腿的大腿和小腿,各关节结构简化为机械模块之间的销轴连接,并通过液压缸驱动.首先对仿生腿整体进行静力学分析和模态分析,从而评估各项性能以及确定设计目标;再将其拆解为基节、大腿和小腿模块进行单独优化;最后将优化结果进行仿真分析,验证所提出方法的可行性.

图1 大型六足机器人及其仿生腿结构Fig.1 Large hexapod robot and its bionic leg structure
大型六足机器人在实际行走中,腿部刚度的强弱直接影响整机运行的稳定性和控制的准确性,同时为防止机器人在行走过程中仿生腿与整机产生共振,应分析仿生腿的模态频率,从而减弱外部激励对仿生腿的影响.六足机器人在实际运行中的常见工况为二步态平地工况和六步态35°斜坡工况,其中平地工况腿部主要承受较大的垂向力,斜坡工况除了承受较大的垂向力外还承受一定的偏载.通过对重载仿生腿进行2 种典型工况下的有限元分析,可综合权衡腿部结构静、动态性能,从而确定优化目标.
有限元分析时约束基节与车体连接处销轴孔的5个自由度,只释放1个绕z轴的旋转自由度,从而模拟基节与车体的相对转动,并且约束基节与侧摆缸铰接处沿x轴方向的位移约束.
在2 种工况下,仿生腿的静、动态性能如图2 所示.由图2可知,腿部应力偏小,最大仅165 MPa,远小于7075铝合金的屈服极限;仿生腿在2种工况下的变形较大,尤其在抵御斜坡工况较大偏载时表现出较大变形,其中平地工况最大变形15.3 mm,斜坡工况最大变形29.6 mm;仿生腿首阶固有频率17.201 Hz,该频率下的振型为整体绕z轴摆动.因此,结合腿部结构的有限元分析和实际行走情况,确定优化设计的目的是在确保2 种工况下仿生腿满足强度设计要求的前提下,增大腿部结构静态刚度、首阶固有频率以及轻量化设计.

图2 仿生腿静、动态性能Fig.2 Static and dynamic performance of bionic legs
1.2 基于Isight的优化平台集成
Isight 是一种基于参数的优化设计软件[11-12],通过集成和管理复杂的仿真流程获取优化设计方案[13-14].图3 为本文基于三维建模软件CATIA、有限元分析软件Abaqus 以及多学科优化软件Isight 建立的仿生腿优化设计流程.首先在CATIA 中对仿生腿进行参数化建模,并通过VB 语言编写脚本实现三维模型自动更新;其次在有限元软件Abaqus 中分析仿生腿各模块的静、动态性能,并通过python 语言对分析过程进行二次开发,从而使CAE自动进行前处理、后处理及求解,从而得到优化所关注的目标响应(最大应力、最大变形、质量和首阶固有频率)结果文件;再次在Isight 平台中分别提取仿生腿各模块的设计变量和分析结果文件,通过Simcode 组件驱动bat 批处理文件使CAD 三维模型重构和CAE 分析更新求解循环进行,并且在试验设计获得的大量离散样本点上拟合精度符合工程需要的近似模型;最后利用NSGA-Ⅱ算法进行优化求解.

图3 仿生腿优化设计流程Fig.3 Bionic leg optimization design process
2 仿生腿试验设计与近似模型建立
2.1 仿生腿参数化模型建立
将仿生腿结构分为基节、大腿和小腿模块,分别建立其参数化模型.结合有限元分析与加工制造的可行性选取参数设计变量.图4 为仿生腿各模块参数化建模,其中基节模块包括9 个厚度变量、4 个方形孔尺寸变量;大腿模块包括4 个厚度变量、2 个U形孔形状变量;小腿模块包括5 个厚度变量、2 个U形孔形状变量,总计26个设计变量.

图4 仿生腿各模块参数化建模Fig.4 The parametric modeling of each module of the bionic leg
2.2 基于优化拉丁超立方的试验设计
常见的试验设计方法有参数试验、正交数组、中心组合设计、拉丁超立方设计以及优化拉丁超立方设计等[15-16].本文所选取的优化拉丁超立方在拉丁超立方的基础上做出改进,使设计变量更加均匀地在空间填充,从而得到更加准确的输入与响应的关系.
利用优化拉丁超立方进行2次试验设计,第1次以较少的样本点观察因子与响应的关系,分析因子的主效应、交互效应和相关性;第2 次生成近似模型初始化和误差分析所需的足够多的样本点.综合考虑计算效率和模型精度,设定基节模块280 个初始样本点、大腿模块60 个样本点、小腿模块80 个样本点.基于优化拉丁超立方生成的基节试验设计结果如表1所示,其中bi代表厚度变量,li、hi代表形状尺寸变量,s1、s2分别代表平地和斜坡工况最大应力,u1、u2分别代表平地和斜坡工况最大变形,f1代表首阶固有频率,m代表质量.

表1 基节试验设计结果Tab.1 The results of hip linkage experimental design
在Isight 中建立的仿生腿多工况集成优化平台如图5 所示,在每组输入参数所对应的输出响应中都自动提取Abaqus 结果文件中平地和斜坡工况下的最大应力、最大变形、首阶固有频率及质量.

图5 仿生腿多工况集成优化平台Fig.5 Integrated optimization platform for bionic legs with multiple operating conditions
2.3 近似模型建立
在对仿生腿各模块进行多目标寻优的过程中,每组样本点都需分别进行2 种工况下的静力学分析和模态分析,计算资源巨大、效率低下,通过建立输入与输出之间的近似模型可减少数值仿真的次数,提升计算效率,以及平滑设计空间的数值噪声.近似模型用式(1)表示输入变量与输出响应的关系.
式中:y(x)为实际输出响应值;y1(x)为用一个已知多项式拟合的近似输出响应值;ε为服从标准正态分布的随机误差;x为输入变量.
常用的近似模型有响应面模型(Response Surface Model,RSM)、克里格模型(Kriging Model)和径向基函数神经网络模型(Radial Basis Function Neural Network Model,RBF)等[17-18].较为常用的响应面模型多为一阶和二阶,其中二阶RSM模型为:
式中:Y为输出;β0为常数;βi为线性影响系数;βii为二次项影响系数;βij为交互项影响系数;k为设计变量个数;ε为近似模型与实际输出之间的误差.
所构建的近似模型精度直接影响计算的准确性[19-20],根据均值、最大值、均方根和复相关系数R2进行误差分析.对于前3 种误差分析类型的评价指标分别为0.2、0.3 和0.2,其值越小表明拟合效果越好;工程上常根据R2评价近似模型精度,R2可接受指标为0.9,其值介于0 和1 之间,R2越大,表明近似模型的精度越高,R2的具体表达式为:
式中:Yi为第i个样本点上的响应近似值;yi为输出响应值;n为样本点数量.
本文分别以RSM、RBF 和Kriging 模型建立各模块的近似模型,不同近似模型的拟合精度比较如表2所示.通过分析每种近似模型的检验指标R2,确定采用RSM建立各模块输入与输出参数的拟合曲面.

表2 不同近似模型的拟合精度比较Tab.2 The comparison of fitting accuracy of different approximate models
基节模块输出响应拟合曲面如图6 所示.由图6可以清晰地看出平地工况最大应力s1、最大变形u1,斜坡工况最大应力s2、最大变形u2、首阶固有频率f1,以及质量m的输出响应与各尺寸变量之间的关系.大腿和小腿模块建立的RSM 与基节模块类似,限于篇幅,不再赘述.
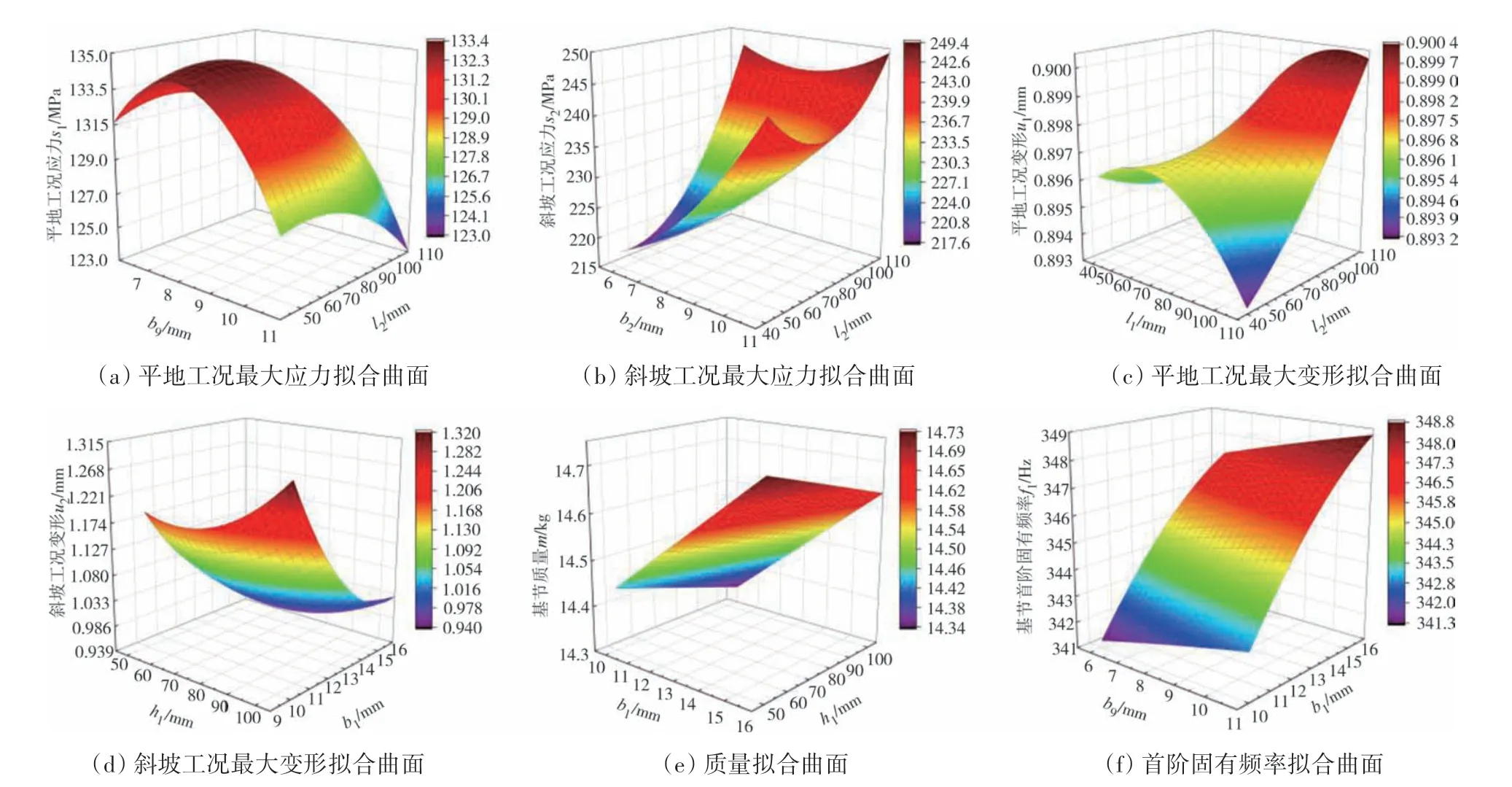
图6 基节模块输出响应拟合曲面Fig.6 Hip linkage output response fitting surface
3 基于近似模型的多目标优化
仿生腿结构各模块的优化问题属于多目标优化问题,需要综合权衡众多响应之间的关系.多目标优化算法分为归一化方法和非归一化方法,归一化方法将多个目标根据权重值处理为单目标,但是Pareto前沿不存在凸起的形状,则该算法不能在此处得到Pareto 最优解.非归一化方法利用Pareto 机制直接进行求解,NSGA-Ⅱ算法作为探索性能良好的一种非归一化方法,寻找Pareto 前沿个体的能力更强,因此选择NSGA-Ⅱ算法寻优.
基于所建立的近似模型,仿生腿各模块的多目标优化数学表达式为:
基于NSGA-Ⅱ算法的仿生腿多目标优化流程如图7所示[21-22].考虑求解过程中的收敛性以及种群广度,设置种群个数为40,进化代数为20,交叉概率为0.9,以基节模块的优化为例,部分目标响应之间的Pareto最优解如图8所示.
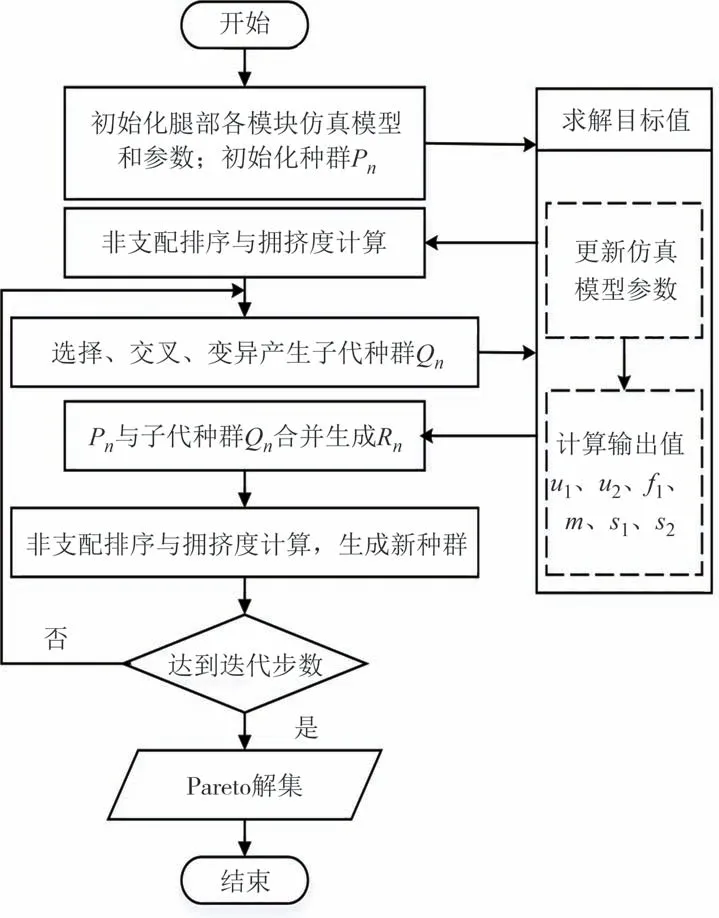
图7 基于NSGA-Ⅱ算法的仿生腿多目标优化流程Fig.7 Multi-objective optimization process of bionic legs based on NSGA-Ⅱ

图8 Pareto最优解Fig.8 Pareto optimal solution
仿生腿各模块的目标响应与质量之间存在相互制约关系,对腿部各结构进行优化的目的在于满足强度的前提下,使静态刚度、动态性能与质量均尽可能达到最优,最终得到基节、大腿、小腿各模块的优化结果,分别如表3和表4所示.优化结果表明,各模块在强度满足设计要求的同时,均实现质量减轻和静、动态刚度提升.

表4 仿生腿性能优化结果Tab.4 The optimization results of the bionic leg performance
4 仿生腿整体优化结果分析
仿生腿各模块优化完成后,对优化后的整体结构进行仿真分析.图9 为优化后仿生腿应力云图,仿生腿整体平地和斜坡工况最大应力比优化前分别增加4.25%、6.30%,仍然满足强度设计要求,并有很大余量.

图9 优化后仿生腿应力云图Fig.9 Optimized bionic leg stress
优化后仿生腿整体首阶固有频率为17.816,与优化前的首阶固有频率相比提高了3.45%.图10 为优化后仿生腿首阶固有频率对应振型,与优化前相同,均为整体绕z轴摆动.

图10 优化后仿生腿首阶固有频率对应振型Fig.10 The vibration shape of the first natural frequency of the bionic leg after optimization
优化后仿生腿变形如图11 所示,与优化前相同,最大变形均出现在腿部末端,其中平地和斜坡工况下的最大变形分别降低9.73%和9.46%.以大腿模块为例,比较优化前、后各处沿腿部连杆路径的变形曲线,优化后平地和斜坡工况下的腿部各处变形曲线均位于优化前之下,表明腿部各处最大变形均相应减小,刚度均明显改善.

图11 优化后仿生腿变形Fig.11 Bionic leg deformation after optimization
表5为仿生腿性能优化结果比较,优化后仿生腿整体强度在满足设计要求的前提下,实现平地工况最大变形下降9.73%,斜坡工况最大变形下降9.46%,质量降低8.63%,首阶固有频率提升3.45%.
5 结论
本文以大型六足机器人重载仿生腿为研究对象,提出一种基于近似模型的仿生腿多工况静、动态多目标优化,通过Isight 集成Abaqus 和CATIA,搭建参数优化平台,实现自动循环求解优化.通过对仿生腿整体性能分析,确定优化目标,利用试验设计获取输入参数和输出响应的样本点,并建立RSM,使用NSGA-Ⅱ算法进行多目标优化.优化后仿生腿平地工况最大变形下降9.73%,斜坡工况最大变形下降9.46%,质量降低8.63%,首阶固有频率提升3.45%,平地工况和斜坡工况最大应力分别提升6.07%和7.97%,在满足强度设计要求的同时仍具有很大余量.证明了本文所提出的针对重载仿生腿的多目标优化方法的有效性,并对大型机器人及其他机械结构的优化设计有一定的指导意义和参考价值.
