考虑人-车-路耦合的路径跟随过程操稳性预测研究
2023-07-14张庭芳朱树亮梁帅王爱春黄菊花吴晓建
张庭芳 ,朱树亮 ,梁帅 ,王爱春 ,黄菊花 ,吴晓建 ,†
(1.南昌大学 先进制造学院,江西 南昌 330031;2.江铃汽车股份有限公司,江西 南昌 330001;3.湖南大学 机械与运载工程学院,湖南 长沙 410082)
辅助驾驶对提升车辆安全性起着重要作用.其中,主动转向、电子稳定系统(Electronic Stability Program,ESP)等典型的辅助驾驶技术,通过子系统最优控制或多系统集成化控制,重点解决车辆的稳定性问题.然而,需要注意的是,在有效减少失稳事故的情况下,横摆失稳、甩尾激转和侧翻失稳等事故仍常有发生.重要原因之一在于,目前辅助驾驶稳定性控制介入所依赖的失稳风险评估,基本上以驾驶员当前输入和车辆当前状态为依据,无法长时间准确预测稳定性状态、预判失稳风险.发展前期稳定性状态预测成为进一步提升辅助驾驶稳定性控制性能的关键.
众多学者在车辆状态预测方面做了研究[1-5].在横摆稳定性状态预测方面,Zhu 等[6]基于历史时刻和当前时刻的转向盘转角,采用二次多项式外推法预估未来转向盘转角,将预估值输入七自由度非线性车辆模型中,得到横摆角速度预测值,再将其与历史时刻及当前时刻的横摆角速度值结合,采用线性外推法进行加权,实现最终横摆角速度预测.陈无畏等[7]根据历史时刻车辆横摆角速度和质心侧偏角数据,采用灰色预测对车辆未来横摆角速度和质心侧偏角进行预测,结合理想线性二自由度车辆模型,设计了基于横摆角速度、质心侧偏角的模糊控制器和可拓联合控制器,实现了电动汽车横摆稳定性控制.
在侧翻风险预测方面,有别于上述基于转向盘及其速率等历史数据进行转向角预测的办法,Ghandour等[8]认为道路已知的情况下,通过阿克曼转向定理预估驾驶员转向输入,从而估计轮胎侧向力和车辆状态,通过横向载荷转移率(Lateral-load Transfer Ratio,LTR)、横向滑移指标(Lateral Skid Indicator,LSI)等指标预测车辆侧翻和侧滑风险.Sun 等[9]提出了构建考虑驾驶员行为、车辆结构参数和道路曲率的“人-车-路”模型,通过弯道速度预警系统计算过弯所允许的最大安全车速,且基于当前车速进一步预测车辆侧偏风险和侧翻风险,从而将风险分级予驾驶员以警示.Sellami 等[10]针对不能准确预测车辆未来时刻的潜在风险问题,采用可靠性-概率的方法预测重型车辆进入弯道时的侧翻风险.Jiang 等[11]提出了一种将高精道路地图和车辆动力学模型相结合的车辆动力学状态估计和预测方法,即通过高精地图和定位,获取当前和未来的道路信息,然后采用扩展卡尔曼滤波(Extended Kalman Filter,EKF)方法进行车辆状态预测,但并未提及如何将高精地图信息转换为EKF所需的驾驶员转向输入预测.
以上文献表明,已有学者提出了假设前方道路已知的侧翻风险预测方法,但在将道路信息转换为驾驶员转向输入的预测计算时,采用阿克曼转向理论的处理方法过于简单;而在操稳性状态预测方面,基本还是基于驾驶员当前转向输入进行未来转向行为预测和横摆失稳预判的.
针对以上不足,且考虑到车辆稳定性隶属复杂的“人-车-路”耦合动力学系统,车辆稳定性状态预测需解决“人-车-路”耦合系统中“人”输入的预测问题.传统辅助驾驶控制由于缺乏“路”的先验信息,状态预测时无法形成“人-车-路”闭环,使预测问题成为输入未知情况下的状态估计难题.先进辅助驾驶系统(Advanced Driver Assistance Systems,ADAS)解决了传统动力学控制中“路”信息无法提前获取的问题,为前期对车辆稳定性状态进行预测和预警创造了条件,使其形成“预瞄获取的‘路’-预测输入的‘人’-预测输出的‘车’”闭环车辆稳定性状态预测系统.因此,本文借助ADAS 提供的前方预瞄路径,通过驾驶员预瞄-跟随模型,解决“人-车-路”闭环反馈系统的转向输入预测问题;而后建立能够准确匹配车辆操稳性的三自由度非线性动力学模型,将转向预测值及当前车速输入动力学模型中,实现跟随前方路径的操稳性状态预测.
1 车辆操稳性预测模型
目前,ADAS 有视觉传感器配置方案,利用视觉传感器可实时感知前方道路,为车辆提供预瞄路径,这为配备辅助驾驶系统的车辆在驾驶员跟随前方路径过程中的操稳性预测提供了基础保障.如图1 所示,视觉传感器和定位系统将预瞄路径信息输入驾驶员预瞄-跟随模型,从而决策出跟踪前方预瞄路径所需的前轮转角,即为预测转向输入,而后将预测前轮转角和车辆当前车速作为三自由度非线性车辆模型的输入,从而得到预测的能够衡量车辆操稳性状态的指标.

图1 操稳性预测方案Fig.1 Prediction scheme of handling stability
1.1 驾驶员模型
根据驾驶员预瞄-跟随建模理论[12],侧向控制驾驶员模型能够根据接收的道路信息、车速信息以及来自车辆模型的信息进行转向盘转角输出.如图2所示,假设汽车以恒定车速沿着前方的道路行驶,在t时刻的侧向速度为vy,预瞄时间为T的预瞄点与车辆的侧向偏差为Δf.
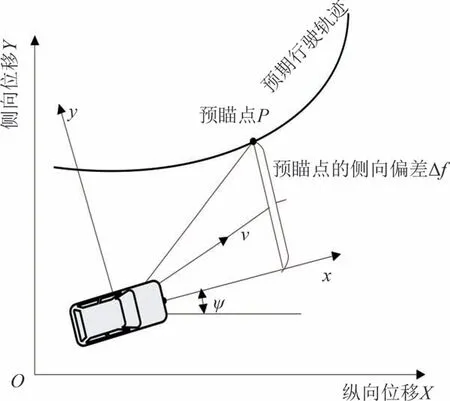
图2 侧向控制驾驶员模型Fig.2 Lateral control of driver model
通过理想二自由度车辆模型得到侧向加速度与转向盘转角稳态增益Gay,建立侧向加速度和转向盘转角的关系.
式中:a、b分别为前、后轴到质心的距离;L为前、后轴轴距;i为转向盘转角到车轮转角的转向系传动比,取值为18;k1、k2分别为前、后轮的侧偏刚度.
考虑到人的生理因素导致的神经和动作的反应滞后,利用传递函数e-tds和1/(1+ths)分别表示神经和动作反应延迟,引入侧向加速度反馈的方式以尽可能减小这种延迟带来的影响,综合各种因素得出的侧向控制预瞄驾驶员模型[13]如图3所示.

图3 侧向控制预瞄驾驶员模型Fig.3 Lateral control of the preview driver model
图3 中,f为实际路径的侧向位移;fe为汽车经过预瞄时间后期望的侧向位移;T为预瞄时间,取值为0.5~2.0 s;为理想的侧向加速度;δ*sw为理想的转向盘转角;P为转向盘转角的修正量系数,本文中取值为0.01;td为神经反应滞后时间,取值为0.20~0.6 s;th为动作反应滞后时间常数,取值为0.05~0.20 s;s为拉普拉斯算子;δsw0是考虑驾驶员生理限制后的转向盘转角;Δδsw是采用侧向加速度误差反馈的方式对驾驶员模型决策出来的转向盘转角修正值;δsw是驾驶员模型最后决策出的转向盘转角;ay为侧向加速度;vy为侧向速度;y为侧向位移.
1.2 三自由度车辆模型
对车辆模型作如下简化:①忽略风阻等外界环境作用力的影响;②忽略俯仰运动和垂向运动的影响;③假设4 个轮胎的机械特性相同,2 个前轮转角相等;④不考虑转向传动系统的误差,将转向盘转角与前轮转角的关系设为线性关系.建立如图4 所示包含侧向运动、横摆运动和侧倾运动的三自由度车辆模型和式(5)~式(7)所示非线性动力学方程.

图4 三自由度车辆模型俯视图及后视图Fig.4 Vertical and back views of 3 degree of freedoms vehicle model
侧向运动:
横摆运动:
侧倾运动:
式中:δ为前轮转角;vx为纵向车速;φ、和分别为车身的侧倾角、侧倾角速度及侧倾角加速度;r为横摆角速度;Fyj(j=fl,fr,rl,rr)为轮胎侧向力;m为整车质量;ms为簧上质量;a、b分别为前、后轴到质心的距离;tw1为前轮距;Iz为整车绕Z轴的转动惯量;Ix为簧上质量绕X轴的转动惯量;hs为侧倾中心到质心的距离;Kφf、Kφr分别为前、后悬架等效侧倾刚度;Cφf、Cφr分别为前、后悬架等效侧倾阻尼系数.图4中,tw2为后轮距;hg为整车质心高度.
1.3 轮胎模型
UniTire 模型是用于车辆动力学仿真和控制的非线性非稳态轮胎模型,能够准确描述轮胎在复杂工况下的力学特性[14].为体现转向过程中的载荷转移影响、轮胎的非线性特性及饱和特性,采用纯侧偏工况UniTire轮胎模型,如式(8)~式(14)所示.
式中:Fy为轮胎侧向力;μy为侧向摩擦因数;φy为无量纲侧向滑移率;Ky为侧偏刚度;Fz0为标准充气气压下轮胎的最大载荷值;a1~a8为UniTire 轮胎模型的8 个侧向特性参数;α为轮胎侧偏角;Fz为轮胎垂直载荷;Fzn为无量纲垂直载荷.4 个车轮的侧偏角和垂直载荷计算如下:
Carsim 可精确模拟复杂车辆动力学特性,具有高行业认可度,因此,本文利用Simulink-Carsim 联合仿真对搭建的三自由度非线性预测模型进行验证.选用Carsim 中的E 级SUV 车型,相应参数如表1 所示.以转向盘正弦输入进行车速分别为36 km/h 和72 km/h 的转向实验,得到三自由度动力学模型及Simulink-Carsim 联合仿真对比结果,分别如图5 和图6所示.
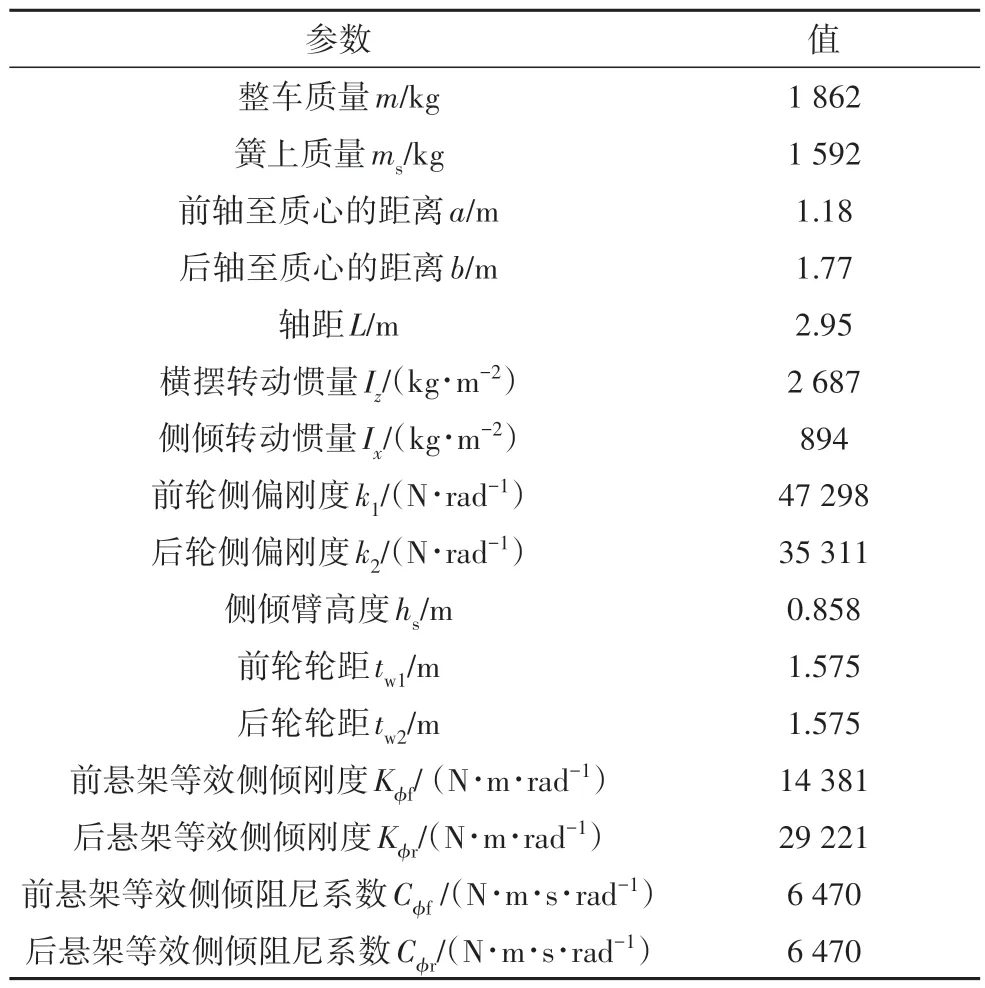
表1 车辆参数Tab.1 Parameters of the vehicle
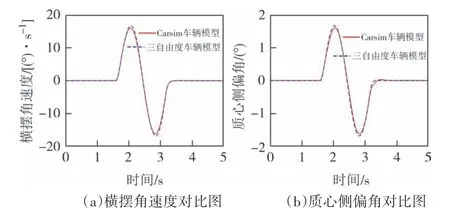
图5 车速为36 km/h时,动力学模型及联合仿真结果对比Fig.5 Comparison of dynamic model and co-simulation results at speed of 36 km/h

图6 车速为72 km/h时,动力学模型及联合仿真结果对比Fig.6 Comparison of dynamic model and co-simulation results at speed of 72 km/h
图5 和 图6 中,车速为36 km/h 时,Simulink-Carsim 仿真的横摆角速度和质心侧偏角峰值分别为15.98 °/s 和1.61°,三自由度的横摆角速度和质心侧偏角峰值分别为16.78 °/s 和1.68°;车速为72 km/h时,Simulink-Carsim 仿真的横摆角速度及质心侧偏角峰值分别为23.27 °/s和-2.64°,三自由度的横摆角速度和质心侧偏角峰值分别为24.27 °/s和-2.81°.两种工况的操稳性状态量响应趋势一致,最大误差基本在5%以内,可知所构建的三自由度非线性动力学模型能够较为准确地表征车辆的横摆动力学响应.
2 操稳性状态预测仿真分析与硬件在环实验验证
为验证所提出的路径跟踪过程中操稳性预测方法的准确性,将Simulink-Carsim 仿真预测结果与图7所示人员操控的驾驶模拟器硬件在环对比,进行双移线路径、变曲率路径及蛇形路径等典型场景的测试验证.
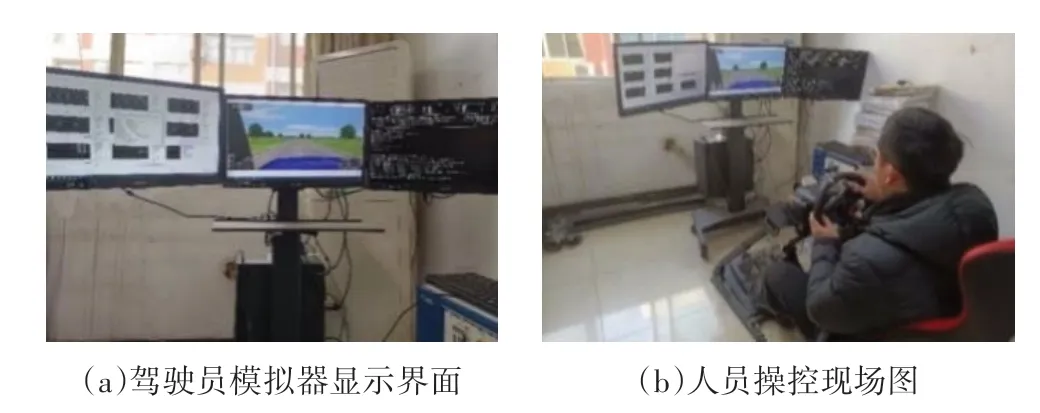
图7 驾驶模拟器在环实验现场图Fig.7 Driving simulator in the loop experiment scene
双移线路径实验工况的目标路径中心线如式(23)所示.x表示纵向位移,侧向位移f(x)为:
变曲率路径工况采用三阶贝塞尔曲线,P0、P1、P2、P3为4个控制点,由式(24)~式(26)3个递推式得到贝塞尔点.
联立式(24)~式(26),可得:
式中:t为递推步长,取值0.01;P0=(0,0);P1=(100,0);P2=(100,50);P3=(60,90).根据式(27)可得到一系列贝塞尔点.
蛇形路径工况的目标路径中心线如式(28)所示.x表示纵向位移,侧向位移f(x)为:
驾驶模拟器硬件在环系统由Carsim Realtime、罗技G29、NI PXI-8513CAN 板卡和NI XNET USB-8502CAN 板卡等组成,双移线路径、变曲率路径及蛇形路径等仿真工况如图8所示.

图8 仿真工况Fig.8 Simulation conditions
在路面附着系数为0.85 的道路上,分别以36 km/h、54 km/h 进行3 种工况的仿真和硬件在环系统人员操控实验.车速为36 km/h时的对比曲线分别如图9~图11 所示,车速为54 km/h 时的对比曲线分别如图12~图14所示.

图9 36 km/h时双移线路径结果对比Fig.9 Comparison of results for double-lane change at 36 km/h
由图9(a)、图10(a)和图11(a)可知,车速为36 km/h 时,所建立的驾驶员模型能够良好地跟踪期望路径,双移线路径跟踪偏差在0.10 m 以内,变曲率路径跟踪偏差在0.15 m 以内,蛇形路径跟踪偏差在0.30 m 以内.由图9(b)、图10(b)和图11(b)可知,3种工况下,驾驶模拟器人员操控的路径跟踪车速也基本保持在36 km/h附近,其中,图10(b)的变曲率路径工况,当道路转向半径变小时,人员驾驶有松加速踏板或制动减速的操作,当转向半径变大后,人员驾驶又恢复加速出弯,这与实际车辆驾驶完全吻合.

图10 36 km/h时变曲率路径结果对比Fig.10 Comparison of results for variable curvature path at 36 km/h

图11 36 km/h时蛇形路径结果对比Fig.11 Comparison of results for snake-shaped path at 36 km/h
图9(c)、图10(c)和图11(c)为横摆角速度预测曲线与人员操作实际曲线对比,需要特别说明的是,横摆角速度预测值均为车辆处于纵向位移为0 时的预测结果,硬件在环数据则为人员驾驶跟踪整条路径的车辆操稳性状态曲线.双移线路径工况,硬件在环人员操控转向盘的转向速率较快,横摆角速度响应时间更短,但横摆角速度曲线走势及最大幅值基本一致;变曲率路径工况,在曲率最大处驾驶员有减速加大转向以保持跟踪当前路径的动作,此时横摆角速度预测偏差最大;蛇形路径工况,要求驾驶员连续转向,实际驾驶员注意力集中,实际值与预测值吻合度高.
由图9(d)、图10(d)和图11(d)可知,在双移线路径工况时,质心侧偏角预测值与实际值曲线走势基本一致,最大误差为0.22°;在变曲率路径工况时,在即将进入最大曲率处,由于人员操控不精确等因素影响,质心侧偏角预测值与实际值最大误差为0.35°;在蛇形路径工况时,质心侧偏角预测值与实际值在峰值处的最大误差为0.33°.
图12(a)、图13(a)和图14(a)所示的驾驶员模型路径跟踪效果,车速为54 km/h 时,双移线路径跟踪偏差在0.25 m 内,变曲率路径工况跟踪偏差小于0.35 m,跟踪效果良好,但高速进行蛇形路径工况跟踪,跟踪误差较大,最大误差达0.45 m,原因在于这类紧急转向工况下,轮胎容易进入非线性区域,使得线性驾驶员预瞄-跟随模型出现模型不匹配,导致跟踪误差增大.图12(b)、图13(b)和图14(b)中,硬件在环人员操控的行驶车速基本保持在54 km/h 附近,其中,双移线路径和变曲率路径工况,在转向半径较小的路段,人员操控为确保路径跟踪效果,出现了减速的操纵.

图12 54 km/h时双移线路径结果对比Fig.12 Comparison of results for double-lane change at 54 km/h

图13 54 km/h时变曲率路径结果对比Fig.13 Comparison of results for variable curvature path at 54 km/h

图14 54 km/h时蛇形路径结果对比Fig.14 Comparison of results for snake-shaped path at 54 km/h
图12(c)、图13(c)和图14(c)的横摆角速度预测值与实际值对比显示,在总体趋势上两者能够较好吻合,但高速时,因前面提到的驾驶员预瞄-跟随模型为线性系统,与高速紧急转向易出现的非线性特性失配,导致预测在幅值上存在一定的偏差.其中,双移线路径工况在紧急转向时,横摆角速度预测最大误差为4.5°/s,变曲率路径工况在最小转弯半径处的预测误差为4.7 °/s,蛇形路径工况在横摆角速度预测峰值上预测误差为5.3 °/s.这一问题后续可通过构建非线性驾驶员预瞄-跟随模型加以改善.此外,还可发现:①硬件在环人员驾驶存在操控不精确,响应曲线出现低幅微调情况,但总体趋势与驾驶员预瞄-跟随模型一致;②高速情况下,操稳性相关的横摆角速度预测曲线,其最大值均稍高于人员操控值,对于操稳风险判断有一定的预警裕量,不至于出现有高风险但无法预测的情况.
图12(d)、图13(d)和图14(d)的质心侧偏角预测值与实际值对比显示,在总体趋势上两者能够较好吻合,双移线路径工况在紧急转向时,质心侧偏角最大误差为0.23°,变曲率路径工况最大预测误差为0.87°,蛇形路径工况在质心侧偏角预测峰值上预测误差为0.78°.
综上,由3 种工况的对比可知,车辆以偏低的车速行驶时,所提出的操稳性预测方法,其横摆角速度和质心侧偏角在预测趋势及幅值上均能与人员操控相吻合,能够达到很好的预测效果;车辆高速行驶时,尽管在曲率较大的弯道可能存在因模型不能完全匹配而出现一定的预测误差,但整体的预测效果仍然较好,所提出的操稳性预测方法具备可行性.
3 结论与展望
1)针对“人-车-路”耦合系统在路径跟踪过程中的操稳性风险预测问题,提出了一种驾驶员预瞄-跟随转向模型及车辆非线性动力学模型相结合的操稳性预测方法,通过Simulink-Carsim 联合仿真对所建立的驾驶员预瞄-跟随模型和非线性动力学模型进行仿真验证,结果表明,所提方法可基于车辆当前车速,预测跟随前方预瞄路径的操稳性状态.
2)将仿真结果与驾驶模拟器硬件在环系统进行对比,通过双移线路径、变曲率路径及蛇形路径工况在车速分别为36 km/h 和54 km/h 下进行验证.结果表明:车辆以偏低的车速行驶时,其横摆角速度和质心侧偏角在预测趋势及幅值上均能与人员操控相吻合.车辆在高速行驶时,虽然存在一定的预测误差,但是整体的预测效果较好,可为车辆操稳性主动控制提供良好的风险预警.
在本文研究基础上,后续可结合实车测试进一步验证算法的有效性;同时,在驾驶员预瞄-跟随模型上,可采用非线性算法加以改进.
