一种新的考虑驾驶员疲劳的人机协同避障策略
2023-07-14刘平巫超辉杨明亮黄雨阳
刘平 ,巫超辉 ,杨明亮 ,黄雨阳
(1.西南交通大学 机械工程学院,四川 成都 610031;2.西南交通大学 先进驱动节能技术教育部工程研究中心,四川 成都 610031)
近年来,随着社会经济的快速发展,我国汽车保有量呈现稳步上升的趋势,交通拥堵问题越来越严重,并由此引发更多的驾驶安全问题,研究无人驾驶技术对于改善交通环境、提高交通通行效率和减少交通事故的发生具有重要意义.由于客观原因,现有汽车智能化水平不会在短期内到达L4/L5 级,因此,人机共驾技术成了研究热点[1].由于避障在智能驾驶任务中的安全要求非常高,所以研究人机协同避障策略具有较高价值[2-3].
对于人机协同避障策略,已有相关学者进行了研究,张红志[4]提出一种基于空间和角度碰撞危险度的双驾双控的驾驶权分配策略,自动驾驶系统的权重随危险度的上升而上升,在危险状况下,自动驾驶系统能够跟踪安全的轨迹.Shi 等[5]提出一种卡方检测法来分析驾驶员对自动控制系统的信任度,并采用模糊控制方法分配驾驶员和自动控制系统之间的权重,保证车辆安全并减少人机冲突.张锐陈[6]从车辆稳定性和安全性的角度出发,设计一种复合控制器,在保障换道过程中稳定性的同时,提高轨迹跟踪的精度.对于在人机共驾模式下采用双驾双控结构的车辆,在避障过程中通常是基于空间碰撞危险度来分配驾驶员与自动驾驶系统之间的权重关系,由于缺乏对驾驶员状态的考虑,会导致当驾驶员处于疲劳或分心状态时,汽车离障碍物较近的状况下,自动驾驶系统才会有足够的权限去跟踪规划出的轨迹,而使汽车的稳定性下降,驾驶人员或乘坐人员的舒适性较差.基于人机动态协同控制的智能驾驶辅助系统可以利用车辆状态、驾驶员状态、外部环境等信息,从而平滑地改变驾驶员与自动控制器之间的驾驶权限[7].在人机协同驾驶过程中,对驾驶员状态检测主要有基于驾驶员操纵信息以及基于驾驶员生理信息的方法.张新锋等[8]设计一种分层的车道保持辅助系统,当驾驶员由于疲劳而偏离车道线时,由上层控制器对转向角进行修正而完成车道保持的任务.Saito 等[9]设计基于驾驶员监管的车道保持辅助系统,当车道偏离时,自动控制系统给予转角补偿;当驾驶员识别系统检测到驾驶员未正常操作时,自动控制系统实施减速策略.孙浩[10]使用图像识别的方法设计基于疲劳检测的人机协同车道保持算法,使人机权重根据驾驶员疲劳状态和车道偏离状态进行动态调整.Kassem 等[11]提出一种基于视觉的疲劳检测方法,该方法用于检测驾驶员疲劳的早期阶段,总体准确率为93.3%.一些研究将驾驶意图考虑在协同驾驶策略中,也有一些研究直接使用驾驶人的生理信号来预测自然驾驶人的意图,将转向盘作为信号,允许自然驾驶人和自动控制系统以连续的方式进行驾驶操作和交换信息[12].Lu 等[13]通过将传感器安装在转向盘上,采集驾驶员的肌电信号并以此来检测驾驶员的疲劳状态.Li 等[14]通过RNN 网络捕捉疲劳驾驶的各种潜在特征以及驾驶中的非线性特征之间的相互关系,建立驾驶员疲劳特征识别模型.
针对目前已有的人机协同避障策略对驾驶员疲劳状态考虑较少的情况,提出一种基于驾驶员操作信息并使用BP 神经网络对驾驶员疲劳状态进行在线识别的疲劳识别模型.结合空间碰撞危险度,设计驾驶权限分配策略,以达到在驾驶员清醒的状况下,控制系统对驾驶员不产生干预;在驾驶员疲劳状况下,由于自动驾驶系统预先拥有一部分控制权,因此汽车的避障轨迹更加平缓.通过搭建Carsim、PreScan 和 Simulink 三方联合仿真平台,在不同工况下验证所提出的驾驶权分配策略的有效性.
1 考虑横向跟踪误差的动力学模型
无人驾驶汽车的避障,本质上是横向跟踪控制问题.图1 为车辆动力学模型,并基于此建立汽车的横向跟踪误差模型.图1 中,φ为汽车航向角,θr为参考航向角,kr为参考曲率,αf、αr分别表示前、后轮的侧偏角,Fyf、Fyr分别表示作用在车辆前、后轴的轮胎侧向力的合力,a、b分别为质心到前、后轴中心的距离,vx、vy分别为汽车的纵向和侧向速度,δf为前轮转角.

图1 车辆动力学模型Fig.1 Vehicle dynamics model
1.1 横向跟踪误差模型
将汽车二自由度微分方程写成矩阵的形式:
式中:Cαf、Cαr分别为前、后轴侧偏刚度(两个车轮);m为汽车质量;Iz为车辆绕z轴转动惯量;ω为横摆角速度.
定义横向位置误差ed,横向角度误差为φ-θr,将其记为eφ,其中θr为参考航向角,经过推导可以得到:
1.2 避障稳定性评价
避障问题的解决需要考虑汽车的横摆稳定性,已有研究表明,基于横摆角速度-侧向速度的相平面能够很好地体现车辆的横摆特性以及对轮胎侧偏角的限制,适用于前轮主动转向的稳定性评价[15].为了保证线性轮胎模型的有效性,需要限制轮胎侧偏角的取值范围,由于当车辆发生横摆失稳时后轴侧滑会造成较大的危害,因此,通常对后轮侧偏角进行约束,并依此推导车辆的横摆稳定性判据.根据后轮的最大侧偏力约束,可以得到横摆角速度的控制阈值如式(4)所示.
式中:lf、lr分别为质心到前、后轴距离.对后轮侧偏角进行约束,即-αr,lim≤αr≤αr,lim,此约束可以转化为对车辆侧向速度vy的约束:
由式(4)与式(5)联合确定了一个封闭的包络线,如图2 所示,分别表示横摆角速度和侧向速度的边界,当车辆状态处于包络线之内时即可保证车辆的横摆稳定性.

图2 车辆稳定性相平面Fig.2 The phase plane of vehicle stability
2 驾驶员疲劳识别网络设计与验证
已有文献研究表明,相对于清醒状态,驾驶员疲劳状态下的转向盘转角相关的信息有明显变化[13].当驾驶员处在疲劳状况下操纵车辆时,转向盘的大幅修正次数会显著增加,选用2 个指标来描述驾驶员的疲劳程度,分别为一段时间内转向盘转角的方差和转向盘瞬时角速度超过某一阈值的次数.由于BP 神经网络算法具有较好的泛化能力和容错能力,所以采用BP 神经网络进行疲劳识别.BP 神经网络结构如图3所示,其中隐含层包括10个节点,输入为xi(i=1,2),分别为滑动窗口中驾驶员转向盘转角的方差以及转向盘瞬时角速度超过某一阈值的次数,输出为疲劳因子z1.

图3 BP神经网络结构Fig.3 The structure of BP neural network
为了建立能够识别驾驶员疲劳信息的疲劳检测模型,使用转向盘结合PreScan 和Simulink 搭建驾驶员疲劳驾驶数据采集平台.试验场景为双车道,车型选取为Audi A8,车道宽3.5 m,总长8 km,驾驶速度60 km/h,仿真步长为0.01 s,采用转向盘分别采集驾驶员在清醒、轻度疲劳、疲劳状态下进行驾驶的操作数据.驾驶员数据采集平台如图4所示.

图4 驾驶员数据采集平台Fig.4 Driver data collection platform
对每种状态下驾驶员转向盘操纵信息使用窗口法来统计,窗口时长60 s,数据为转向盘转角的方差和转向盘瞬时角速度超过某一阈值的次数(分别为x1和x2),每种状态分别采集10 组,总共600 000 个采样点.图5为不同状态下操作信息随时间的变化图.
将采集到的驾驶员操作信息数据进行处理,驾驶员在清醒、轻度疲劳和疲劳状态下采集的样本疲劳因子分别为0.25、0.50和0.75,如表1 所示.并将采集到的数据用于训练疲劳识别网络.

表1 驾驶员操作特征样本格式Tab.1 Sample format of driver manipulate feature
利用驾驶员数据采集平台进行疲劳识别模型的验证.采集5 组驾驶员疲劳数据,仿真工况与采集时所设置一致.将转向盘转角的方差和转向盘瞬时角速度作为疲劳识别网络的输入,将最终识别为疲劳的样本数与采集数据的总样本的比值作为模型的疲劳识别精度,经过计算可以达到85.61%.
3 人机协同避障策略设计
人机协同避障策略采用双驾双控结构,如图6所示.基于LQR 设计自动驾驶控制器,为了模拟驾驶员操控汽车,基于最优预瞄侧向加速度理论建立驾驶员模型.控制权分配策略以疲劳因子和空间碰撞危险度(Space Risk of Collision,SRC)作为输入,以自动驾驶系统控制权作为输出.驾驶员模型输出的转角δh与自动驾驶系统输出的转角δa经过控制权分配策略后得出的转角δ作为最终的控制信号.

图6 人机协同避障策略结构Fig.6 The structure of human-machine cooperative obstacle avoidance strategy
3.1 基于LQR的横向跟踪自动驾驶策略
LQR 是一种依赖被控对象状态空间方程的最优控制方法.设定代价函数为:
式中:Q、R分别为与状态量和输入量有关的权重矩阵.需要求出J在满足式(7)约束下的极小值:
其中Q、R通过单移线路径跟踪工况仿真试验确定,其值为:
已有研究推导[16]了LQR 的求解方法.最终的反馈控制量为:
式中:k是求解Riccati 方程的解.将反馈控制量代入式(3)可得:
由式(9)可以看出,误差不可能等于0.引入前馈控制量δf来尽量减小误差,得到前轮转角u为:
状态空间方程为:
3.2 驾驶员模型
在驾驶员实际驾驶过程中,会使汽车在未来一段时间内的行驶轨迹与期望轨迹之间的偏差尽可能小,利用驾驶员的这一特性[17],构建目标函数:
式中:f(t)、y(t)分别为汽车实际与期望的侧向位置坐标;τ为与时间相关的积分项;Tp为预瞄时间.假设汽车侧向以匀加速运动,可得:
通过求解目标函数,可以得到最终理想的侧向加速度为:
由于驾驶员的身体和生理限制,存在各种延迟因素.延时环节可以表示为:
式中:td为驾驶员的神经反应延迟时间,取0.2 s;th为动作延迟时间,取0.1 s.为了减小延时因素对驾驶员模型的影响,引入校正环节来修正:
式中:Gay为稳态下的侧向加速度增益.根据文献[18],取Gay=3.865 m·(s2·rad)-1,Tc=0.057 s.转向盘转角可表示为:
H(s)为延时环节,C(s)为校正环节[19].经过转换,得到驾驶员作用的前轮转角可以表示为;
式中:k为转向传动机构传动比,通过在Carsim 中查找获得;转向器传动比Cfac=43.7 mm·rev-1.
3.3 考虑空间碰撞危险度的驾驶权限动态分配策略
在驾驶员与自动驾驶系统共同作用于汽车的状态下,驾驶员和自动驾驶系统对应的权重应当在驾驶过程中随着驾驶员状态和驾驶环境的变化而发生变化,并且两者权重之和应当为1.为了在这一过程中合理分配权重系数,本文提出一种基于空间碰撞危险度和驾驶员疲劳因子的控制权动态分配策略.
3.3.1 空间碰撞危险度对驾驶权分配的影响
空间碰撞危险度考虑两方面因素:汽车与障碍物之间的相对距离以及汽车运动方向与障碍物之间的角度(航向角)关系[4].
1)相对距离对危险度的影响.当汽车与障碍物的相对距离d处于汽车行驶的安全距离dmax与允许的最小距离dmin之间时,汽车与相对距离相关的危险度dN用式(20)计算.
与相对距离有关的危险度最终采用分段函数的形式来描述.
式中:λ(d)为与相对距离有关的危险度值.当相对距离大于等于安全距离时,危险度为0;当相对距离处于安全距离与最小距离之间时,危险度随相对距离的减小而增大;当相对距离小于等于允许的最小距离时,危险度为1.
2)航向角φ对危险度的影响.为了描述汽车航向角对危险度的影响,令汽车与障碍物之间2 个临界角度分别为θ1和θ2,如图7 所示.θ1和θ2中最小和最大的值分别为θmin和θmax.

图7 航向角关系示意图Fig.7 Schematic diagram of heading angle
对航向角进行处理得θN为:
当汽车的航向角为[θmin,θmax]时,危险度应当一直存在;航向角在[θmin,θmax]之外时,危险度为0.当航向角越接近临界角度,危险度应当越来越小,而当φ=(θmax+θmin)/2 时,危险度应当最高.定义航向角危险度λ(θ)为:
综合考虑相对距离和航向角,描述空间碰撞危险度的数学模型为:
3.3.2 基于模糊逻辑规则的驾驶权动态分配策略
模糊逻辑规则具有不依赖精确的数学模型,鲁棒性强且容错能力较强等优点.本文采用模糊逻辑规则完成驾驶权动态分配,输入为空间碰撞危险度和驾驶员疲劳因子,输出为自动控制器的驾驶权重.定义空间碰撞危险度的论域为{0,0.25,0.5,0.75,1},模糊子集为{HR,LR,LZ,JQ,HQ},分别表示不危险、有一点危险、较危险、很危险和危险;驾驶员疲劳因子的论域为{0.25,0.5,0.75},模糊子集为{LF,MF,HF},分别表示清醒、轻度疲劳和疲劳,采用贝塞尔形和高斯形隶属度函数来描述.驾驶权重的论域为{0,0.25,0.5,0.75,1},模糊子集为{LL,TD,MD,RD,RH},分别表示为低、较低、中、较高、高,采用三角形隶属度函数来描述.建立模糊逻辑规则如表2 所示,对应的模糊逻辑控制平面图如图8 所示.所设计的模糊规则在驾驶员疲劳程度较低以及危险度较低时,自动驾驶系统的权限较低;当驾驶员处于疲劳状态而危险度较低时,自动控制系统具有一部分权限.
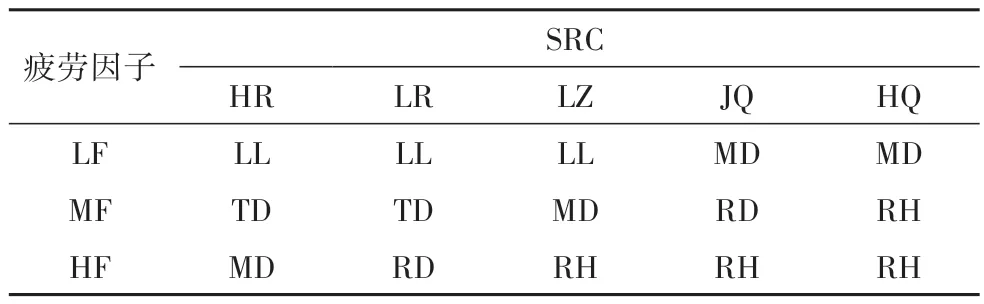
表2 模糊逻辑规则Tab.2 Fuzzy logic rules

图8 模糊逻辑控制平面图Fig.8 Fuzzy logic control plane
通过模糊逻辑推理,可以得到自动驾驶系统的控制权重,最终作用到车辆上的实际控制量为:
式中:w为自动驾驶系统权重;θsw为加权后的前轮转角;u为自动驾驶系统前轮转角;θd为驾驶员模型前轮转角.
4 仿真与结果讨论
4.1 联合仿真平台的建立
为了验证本文提出的智能汽车人机协同避障控制策略,借助于转向盘搭建了Carsim、PreScan 和Simulink 联合仿真平台.Carsim 提供车辆动力学模型,PreScan 提供驾驶场景,Simulink 编写规划控制算法.对比的策略有2 个:一是仅考虑SRC 的驾驶权分配策略;二是考虑空间碰撞危险度和驾驶员疲劳因子(Space Risk of Collision and Fatigue,SRCF)的驾驶权分配策略.避障前已识别驾驶员的疲劳因子,车辆参数如表3 所示.仿真工况为72 km/h 的条件下分别进行静态障碍物和动态障碍物避障.

表3 整车参数Tab.3 Vehicle parameters
4.2 静态障碍物避障仿真
设置静态障碍物避障仿真场景,设置前车1 和前车2的坐标分别为(120,0)和(240,3.5),分别对基于SRC 的驾驶权分配策略和基于SRCF 的驾驶权分配策略进行仿真试验.静态障碍物避障轨迹如图9所示.

图9 静态障碍物避障轨迹Fig.9 Static obstacle avoidance trajectory
当驾驶员处于一种较为疲劳的状态时,在基于SRCF 的控制权分配策略中,自动控制系统拥有一部分控制权限,自车在接近障碍物的过程中危险度逐渐升高,此时自车分别在t1和t3时刻开始避障;在基于SRC 的避障策略下仿真时,由于刚开始离障碍物较远,自动驾驶系统的权限较低,只有在接近障碍物时,自动驾驶系统的控制权限才会快速上升,最终在t2和t4时刻开始避障,因此,汽车行驶的轨迹曲率变化较大.图10 为在2 种策略下进行避障的过程中自动驾驶系统驾驶权重的变化图.

图10 自动驾驶系统驾驶权重变化图Fig.10 The diagram of automatic driving system driving weight
由图10 可知,在SRCF 策略中,当驾驶员处在一种疲劳的状况下时,经过控制权分配,在避障过程中自动控制系统的权限变化更为平缓.基于SRC 的驾驶权分配策略以及基于SRCF 的驾驶权分配策略在静态障碍物下的仿真结果如图11 所示.由图11 可知,相较于基于SRC 的驾驶权分配策略,基于SRCF的驾驶权分配策略在汽车避障过程中由于提前进行避障,侧向加速度、质心侧偏角和横摆角速度分别降低了8.9%、18.2%、11.1%,表明汽车在避障过程中的稳定性更好.

图11 静态障碍物工况下仿真结果Fig.11 Simulation results on static obstacles condition
静态避障过程中横摆角速度与侧向速度在相平面中的分布如图12 所示.由图12 可知,相较于基于SRC 的驾驶权分配策略,SRCF 的驾驶权分配策略在避障过程中的横摆角速度与侧向速度在相平面中的分布更加集中,并且横摆角速度始终处于±0.1 rad/s内,验证了提出的控制策略能够在汽车避障过程中保持良好的横摆稳定性.

图12 静态障碍物工况横摆角速度与侧向速度在相平面中的分布Fig.12 Yaw rate-lateral velocity distribution in the phase plane under static obstacle condition
4.3 动态障碍物避障仿真
如图13 所示,设置动态障碍物仿真工况,前车1和前车2 的起始坐标分别为x10(70,0)和x20(145,3.75).障碍物速度均为8 m/s.自车车速为20 m/s.对2种工况进行仿真,t0为初始时刻.t1、t2和分别为2 种工况下躲避前车时的时刻.当驾驶员处于疲劳状况下驾驶时,采用基于SRC 的驾驶权分配策略在时刻进行避障,此时,前车1 和前车2 分别位于;而采用基于SRCF 的驾驶权分配策略,由于当前驾驶员疲劳程度较高,当自车接近障碍车辆时,危险度上升导致自动控制系统所占的控制权上升,因此,分别在t1、t2时刻就会开始避障,此时前车1 和前车2 分别位于xt1和xt2,实线避障轨迹t1时刻与障碍物之间的距离较虚线避障轨迹在时刻与障碍物之间的距离更远,表示更加安全,并且汽车行驶出的轨迹更加平滑.

图13 动态障碍物避障轨迹Fig.13 Dynamic obstacle avoidance trajectory
在2 种驾驶权分配策略下进行避障的过程中,自动驾驶系统的控制权随时间的变化,如图14 所示.由图14 可知,与基于SRC 的驾驶权分配策略相比,基于SRCF 的驾驶权分配策略在避障过程中,自动控制系统的权限始终维持在0.4左右,在避障过程中不会出现剧烈的变化.图15 为2 种驾驶权分配策略在动态障碍物工况下仿真结果.

图14 动态障碍物工况自动驾驶系统驾驶权重变化图Fig.14 The diagram of automatic driving system driving weight under dynamic obstacle condition

图15 动态障碍物工况下仿真结果Fig.15 Simulation results on dynamic obstacles condition
在基于SRC 的驾驶权分配策略下,当自车与障碍物较近时,自车才有足够的权限完成避障任务,而基于SRCF的驾驶权分配策略在汽车避障过程中,由于驾驶员处于疲劳状态下,自动驾驶系统本身占据一定的权重,当自车的危险度升高时,自动控制系统所占的权重可以到达足够大从而控制汽车进行避障.通过比较2 种策略在避障过程中的表现,基于SRCF 的驾驶权分配策略在避障过程中的侧向加速度、质心侧偏角和横摆角速度相比于基于SRC 的驾驶权分配策略分别降低了51.5%、53.4%、50.6%.表明在动态障碍物的避障工况中,基于SRCF的驾驶权分配策略相比于基于SRC 的驾驶权分配策略具有更好的表现,汽车在行驶过程中具有更好的稳定性.
对横摆角速度与侧向速度在相平面中的分布进行分析,如图16所示.

图16 动态障碍物工况横摆角速度与侧向速度在相平面中的分布Fig.16 Yaw rate-lateral velocity distribution in the phase plane under dynamic obstacle condition
在动态障碍物避障过程中,基于SRCF的驾驶权分配策略相比于SRC 的驾驶权分配策略,横摆角速度与侧向速度在相平面中的分布更加集中,并且横摆角速度一直处于±0.1 rad·s-1内.横摆角速度与侧向速度组成的散点在相平面中的分布更加集中,验证了所提出的人机协同避障策略能够在动态障碍物避障过程中保持良好的横摆稳定性.
在静态障碍物和动态障碍物的避障工况中进行仿真试验分析的结果表明,与基于SRC 的驾驶权分配策略相比,基于SRCF的驾驶权分配策略在避障过程中可以进行提前避障的动作,自动控制系统和驾驶员的权限变化更加平缓,汽车在避障过程中的侧向加速度、质心侧偏角以及横摆角速度的峰值均有一定程度的削弱,横摆角速度和侧向速度相平面的分布更加集中,表明汽车在避障过程中的稳定性更好.
5 结论
本文通过实验数据采集平台,对驾驶员疲劳操作数据进行采集,并基于所采集的数据训练BP 神经网络对驾驶员的疲劳状态进行检测,使用模糊逻辑规则设计基于空间碰撞危险度和驾驶员疲劳因子的驾驶权分配策略.通过Carsim、PreScan 和 Simulink三方联合仿真平台,在高速工况下,对静态障碍物和动态障碍物的避障性能分别进行仿真来验证所设计的驾驶权分配策略的有效性.仿真结果表明,在相同环境中,基于SRC的驾驶权分配策略和SRCF的驾驶权分配策略均能够完成避障.不同的是,与基于SRC的驾驶权分配策略相比,SRCF 的驾驶权分配策略在驾驶员疲劳状态下,进行避障过程中由于对驾驶权限进行更合理的分配,汽车行驶的轨迹更加平滑,汽车在避障过程中的侧向加速度、质心侧偏角、横摆角速度的峰值均有一定程度的减小,并且驾驶权限的变化更加平缓.通过对汽车的横摆角速度与侧向速度相平面进行比较,结果显示,SRCF 的驾驶权分配策略在汽车避障过程中横摆角速度与侧向速度组成的散点更加集中,验证了控制权分配策略的有效性.
