基于支持向量机的卫星姿控系统的故障诊断研究
2023-07-12李翔宇
李翔宇 ,李 帅
(沈阳理工大学,辽宁 沈阳 110158)
0 引言
随着太空探索的不断深入以及人们对网络通信的要求越来越高,近年来大量卫星被发射[1-2]。尽管航天器经过精心设计和测试以满足其使命,但许多航天器很早就遭遇了不可恢复的在轨故障。这些故障将会导致航天器预期寿命缩短、飞行能力退化甚至阻碍航天器完成其主要使命。其中,姿态与轨道控制分系统重组了许多关键系统,主要控制航天器的姿态和轨道,其发生故障将会严重损坏航天器。像“开普勒”空间望远镜上的4 个反作用轮中的2 个报废,会极大地威胁已收获颇丰的望远镜搜寻行星的旅程[3]。国外研究者分析了1980—2005 年全世界近130 个航天器中发生的156 次在轨故障,研究表明:及时对在轨航天器进行故障检测和判别对卫星飞行任务意义重大[4]。
故障检测通常由三部分组成:故障检测、故障隔离、故障识别。现有航天器姿态控制系统的故障检测方法分为两类:基于模型的方法、基于数据驱动的方法。航天器故障诊断细化分类如图1所示。
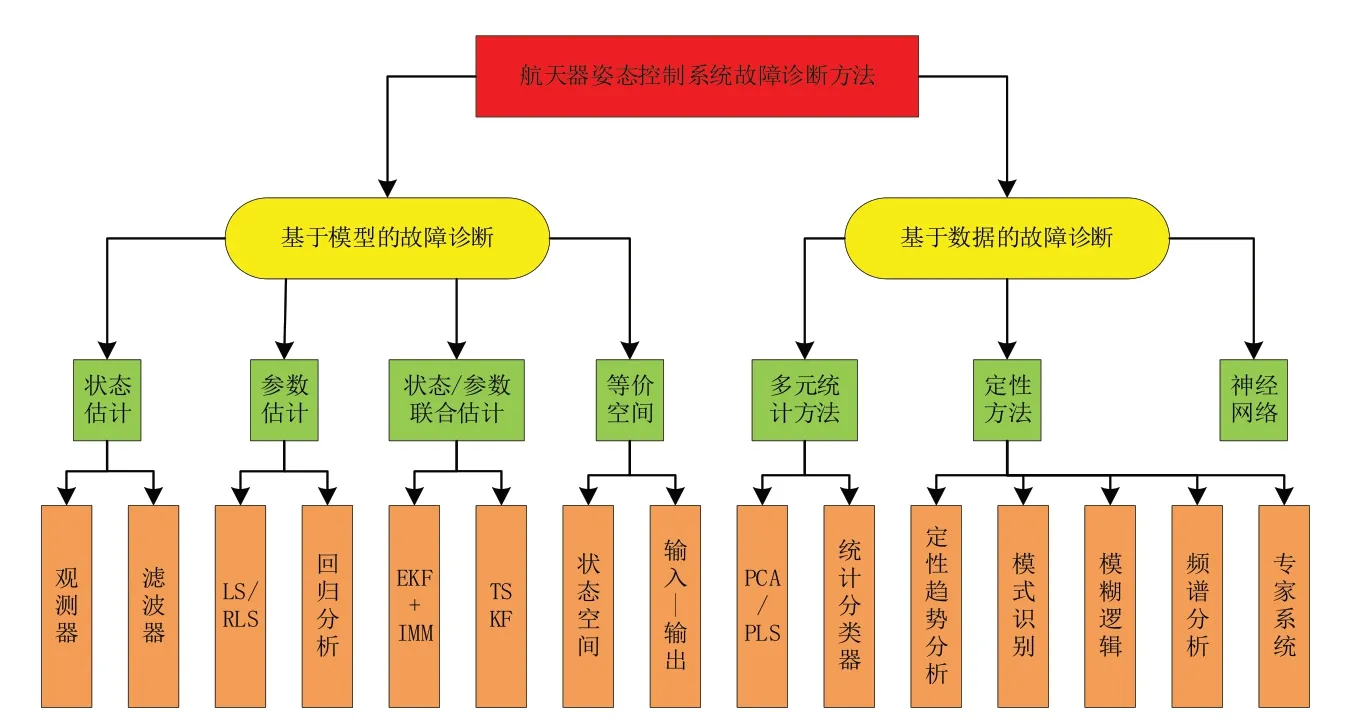
图1 航天器故障诊断细化分类
在故障诊断发展的初期,由于生产力、技术限制,人们使用的系统简易,出现的故障模式简单,往往建模能很好地解决故障问题,所以基于解析模型的方法是发展最早、研究最系统的一种故障诊断方法[5]。基于解析模型的故障诊断方法具有不需要另增加其他物理设备的优点,但复杂系统需要极强的专业知识、严格的数学推导、敏锐的误差感知,建模难度极大。
基于数据驱动的方法不依赖系统的先验知识,例如数学模型和专家经验,该技术以采集到的不同来源和不同类型的监测数据作为基底,利用各种数据挖掘技术获取其中隐含的有用信息,表征系统运行的正常模式和故障模式,进而达到检测与诊断的目的[6]。
1 总体方案设计
第一步,数据提取:从半物理仿真平台中提取实验数据;第二步,数据处理:将实验数据分割并提取时域特征;第三步,划分数据集:将特征数据集划分成测试集与验证集;第四步,得出结果:将数据集注入算法得出结果。
2 典型反作用飞轮故障模式分析
一般可以将常见的典型反作用飞轮故障模式归纳为三类,分别是卡死故障、空转故障、力矩衰减故障。反作用飞轮三种典型故障的转速的遥测图像[7]分别如图2、图3、图4所示。
图2 反作用飞轮卡死故障转速遥测曲线
图3 反作用飞轮空转故障转速遥测曲线
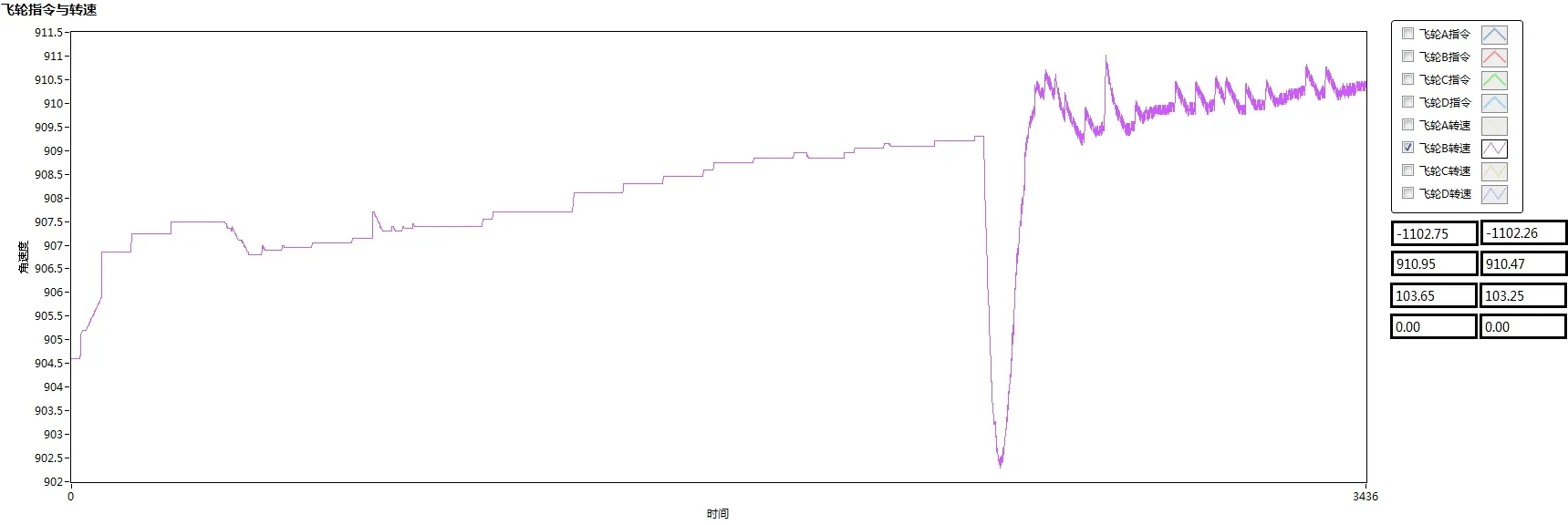
图4 反作用飞轮力矩衰减故障转速遥测曲线
反作用飞轮中的卡死故障、空转故障属于突变性故障,可以肉眼观察出区别。但由于特征比较单一,机器很难区分。而反作用飞轮中的力矩衰减故障属于渐变故障,不易区分[8]。
3 支持向量机反作用飞轮故障检测方法
已知训练集T={(x1,y1),(x2,y2),···,(xN,yN)},其中,xi是样本输入向量;yi是样本输出向量,xi∈Rn,yi∈{-1,+1},i=1,2,···,N。
选取适当的核函数,这里选取高斯径向基核函数(gaussian radial basis function, RBF),其形式为:
将训练样本集映射到Hilbert 空间,得到对应的新的训练集T={(x1,y1),...,(xl,yl)}。
选取适当的惩罚参数C,构造并求解最优问题:
式中,ϖ是Hilbert 空间中的分类面,ξi是松弛变量,C是惩罚参数。构造Lagrange 函数,得到上述问题的对偶问题为:
得到最优解a*=(a1*,···,al*)T;选取a*的一个正分量0<aj*<C,根据此计算阈值:
构造决策函数,得到:
4 实验结果
将从卫星半物理仿真平台中获得的数据集应用于提出的方法,数据集共四类:反作用飞轮卡死故障、空转故障、力矩衰减累积故障、正常数据,每类数据提取约70 h(周期为0.25 s),将正常数据集与反作用飞轮衰减数据集在时域中划分成平均值、标准差、偏度、峭度、最大值、最小值、峰峰值、均方根、振幅因数、波形因数、冲击因数、裕度因数、能量13种特征,得到每类50 份数据[9]。由于反作用飞轮卡死故障与空转故障具有特殊性,研究者往往以肉眼可分或显而易见结束。但事实上,肉眼可分是对进化了几千万年的人类而言的,对机器来说没有较好的特征输入,任何数据集都是难以区分的。针对此问题,本文使用时域中平均值、偏度、峭度、最大值、最小值、峰峰值6 种特征作为输入特征,并将训练集测试集划分成8∶2,得到结果如图5、图6 所示。
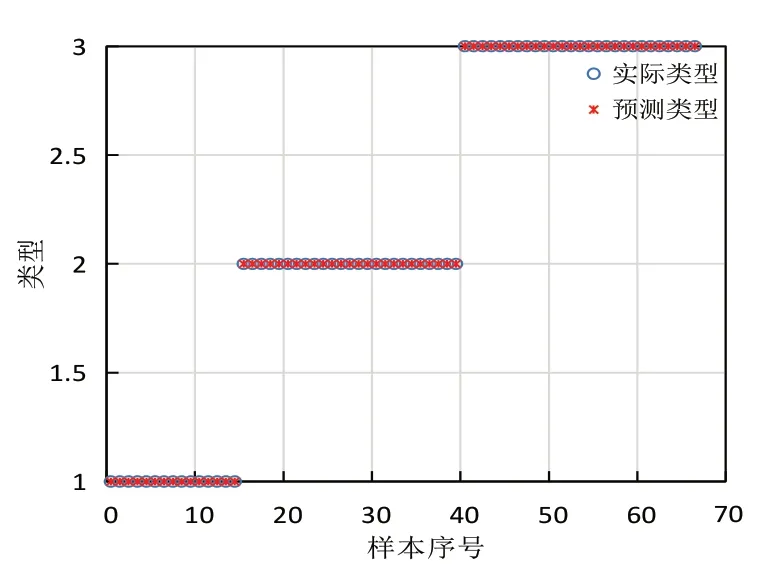
图5 正常数据与卡死、空转分类结果
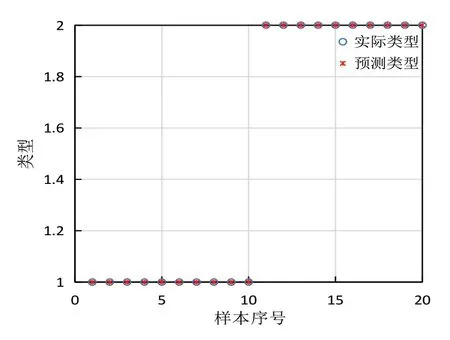
图6 正常数据与力矩衰减分类结果
图5 中分别是正常数据、反作用飞轮卡死故障与空转故障的分类结果,图6 中分别是正常数据与反作用飞轮衰减故障的分类结果,识别准确率都是100%。其中,每一种故障数据代表一种类型,即为纵坐标;训练集每种故障数据类型使用的样本个数共同组成样本序号,即为横坐标。
5 结束语
目前,卫星姿态系统的故障研究往往利用卫星的姿态信息进行判别,但卫星姿态信息只是卫星某一部件发生故障后的表现,要想得到更精准的数据,研究具体卫星部件则是必然的,本文的研究可以为卫星的故障定位问题提供一种更好的解决方案[10]。