小型定日镜控制系统的研究*
2023-07-12刘二林魏晓文李瑞彪黄恩培
李 杰 ,刘二林 ,魏晓文 ,李瑞彪 ,黄恩培
(兰州交通大学机电工程学院,甘肃 兰州 730070)
太阳能因具有普遍性、清洁性等特点,具有很大的开发潜力[1-2]。在我国,太阳能资源丰富,但在对太阳能的利用中存在间歇性、光照强度不足等问题,使得对太阳能的利用率很低[3-4]。基于此,项目组设计了一种开环控制的小型定日镜系统,定日镜系统可通过调节反射镜面的水平角度与俯仰角度,将镜面所反射出的光线能够定向地照射在集热塔的上面,实现对太阳能的收集与利用[5]。该设计不仅可以应用在类似于集热塔的热量收集方面,同时也可以应用在比如暗室照明、光线的感应等很多需要自动反射太阳光的场所中,对降低化石能源的使用量、减少二氧化碳排放有着积极的促进作用[6]。
1 定日镜中太阳位置与镜面反射角度的计算
1.1 太阳位置的计算
根据球面三角形公式解天文三角形可得太阳高度角和方位角计算公式如下所示[7]。太阳赤纬角δ为:
式中,φ代表当地的纬度,δ为赤纬角的数值,ω为时角的数值。
由以上公式可得到太阳的高度角H和方位角A。
1.2 镜面反射角度的计算
确定好太阳位置后,再结合向量的运算方法,建立如图1 所示的数学模型,进而得到一组太阳入射光线的向量和反射光线的向量。根据入射角与反射角的位置关系,结合计算得到的入射光线的向量和反射光线的向量,计算出法线向量,按照法线向量就可以对镜面姿态进行相应的角度调整[8]。
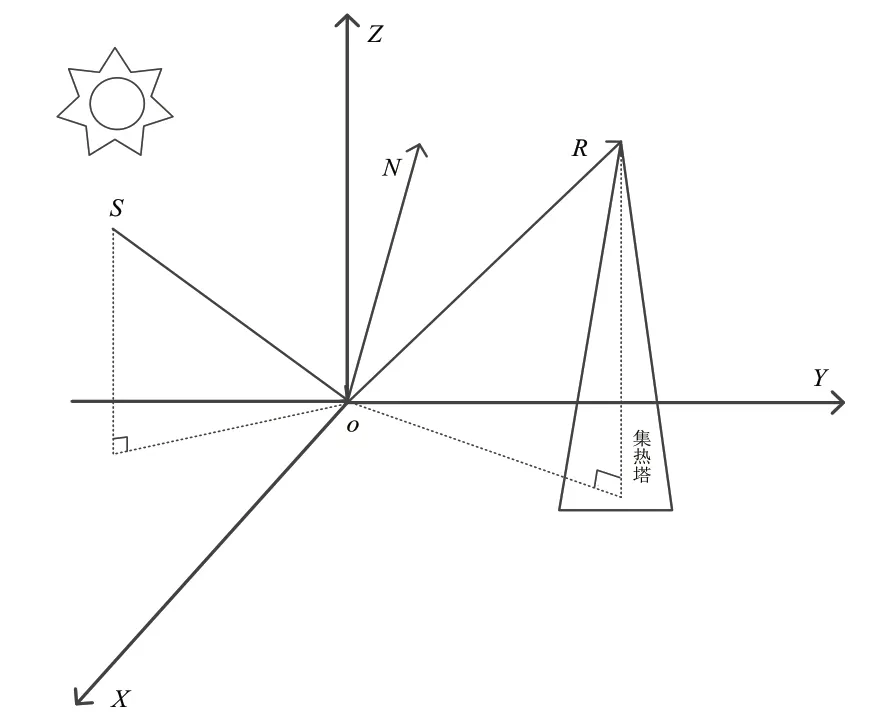
图1 入射光线与反射光线之间位置关系
其中,n为全年中的第几天。太阳时角ω为:
其中,TR为全24 小时制时间。
太阳高度角H和方位角A为:
其中,Hs、As分别为入射方向的太阳高度角和太阳方位角。
其中,Hr、Ar分别为反射方向的太阳高度角和太阳方位角。
2 硬件设计
课题组设计的定日镜跟踪控制系统由以STM32f103RCT6 为核心的跟踪控制单元、GPS 模块、光强检测模块、驱动模块、电源模块以及降压模块组成。其跟踪系统结构框图如图2 所示。该系统工作后,通过GPS 接收并解码的位置信息计算出太阳的高度角和方位角,并将其作为单片机的输入信号。再根据此刻的太阳高度角和方位角计算出太阳入射的角度及方向,进而得到此时的定日镜镜面角度。单片机通过两路PWM 输出对应的脉冲信号,控制两台舵机调整定日镜镜面的水平角度与俯仰角度来改变反射光线的位置,从而达到定向反射光线的作用[9]。同时对光强进行检测,判断是否进入休眠状态。此外,还增加了降压模块,对系统的电路起到了保护作用。
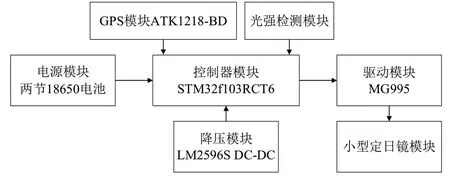
图2 跟踪系统结构框图
该系统各模块的实现方式如下。
1)控制器模块:本设计使用以STM32f103RCT6为主芯片的单片机开发板。这种开发板预置有多组外设接口,便于下载程序到芯片。同时,可以将开发板与电脑连接,便于对运行数据进行实时监督,能够很好地满足系统的控制要求。
2)GPS 模块:选用型号为ATK1218-BD。采用GPS 卫星和北斗卫星共同发送信号的双模定位芯片,该芯片能够同时提供经纬度数据、海拔数据、时间数据,且直接可以用单片机的电源进行供电。
3)光强检测模块:在此选用普通光敏电阻即可。通过采集光敏电阻测量电路输出的电压值来判断此刻太阳光的强弱,若太阳光不足,则系统处于休眠状态[10]。
4)驱动模块:采用两台型号为MG995 的数字舵机。驱动方式为PWM 进行驱动,适合用于本系统的采光装置。
5)电源模块:系统的电源模块采用两节18650 电池。该型号电池可以进行循环充电,理想状态之下计算充满一次电,可以对系统供电达到200 h,符合设计需要。
6)降压模块:采用的型号为LM2596S DC-DC 芯片。在系统设计中,在电源模块里增加两路降压模块,为芯片提高降压保护的作用,防止当舵机卡位或者其他情况时电流过大损坏单片机芯片。
3 软件设计
采用C 语言进行编程,主要包括主程序、GPS 模块程序、舵机角度控制程序等,其中,主程序如图3所示。
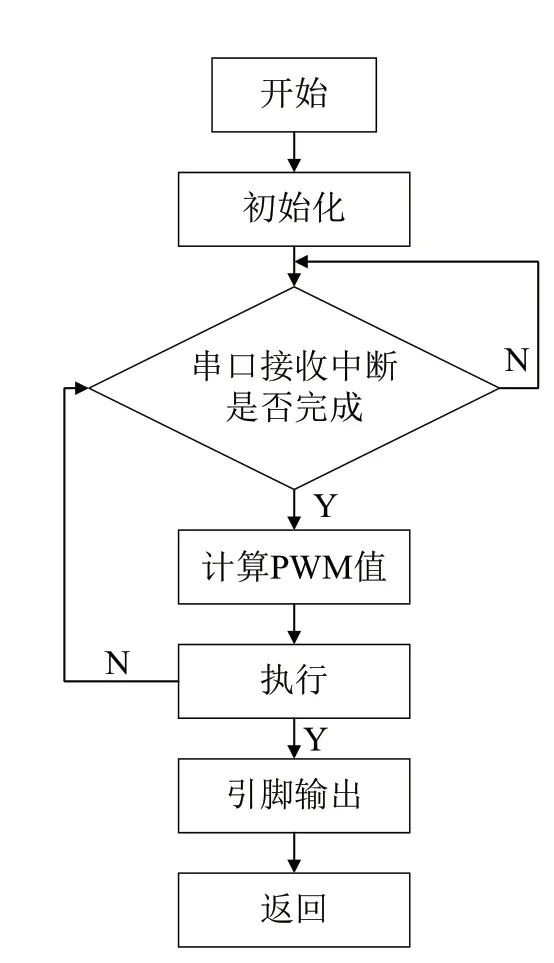
图3 主程序
程序总体设计流程为设置循环主程序,由GPS模块产生详细的位置信息和时间信息,然后将位置、时间信息发送给单片机;在程序中,写入一个程序读取该信息,在子程序里开始初始化两路PWM 程序,按照设置的延时与占空比,系统请求中断返回到主函数,程序输出对应的PWM 脉冲,按照设定的角度输出给舵机,进行旋转。软件程序流程图如图4所示。
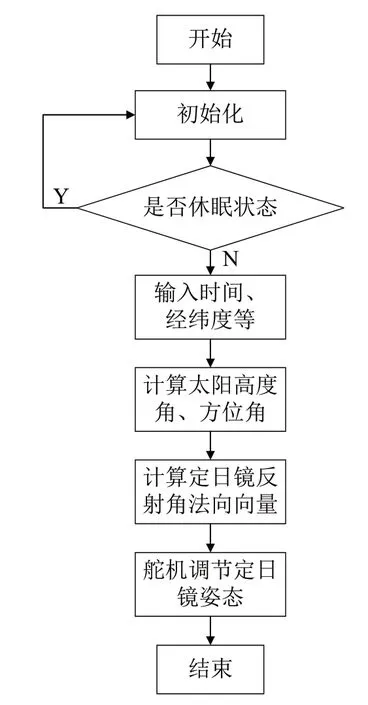
图4 软件程序流程图
4 实验
4.1 实验参数
GPS 模块以38 400 的波特率进行数据采集,将系统所接收到的数据,进行相应的调试和分析。分析数据时采用GPS 模块配套的串口软件GNSS_Viewer-7.0 进行数据分析和调试。课题组以甘肃省兰州市安宁区为实验地点,得到所需要的参数信息。
4.2 参数分析
根据GPS 模块返回的位置参数,计算从早晨8:30 到下午17:30 的太阳高度角H、方位角A及时角ω之间的变化规律,设置程序捕捉参数间隔的时间是每30 min 捕获一次。以2022 年4 月23 日为实验日期,观察一天中定日镜调整镜面共19 次,一天之内太阳高度角H、方位角A及时角ω的变化趋势图,如图5 所示。
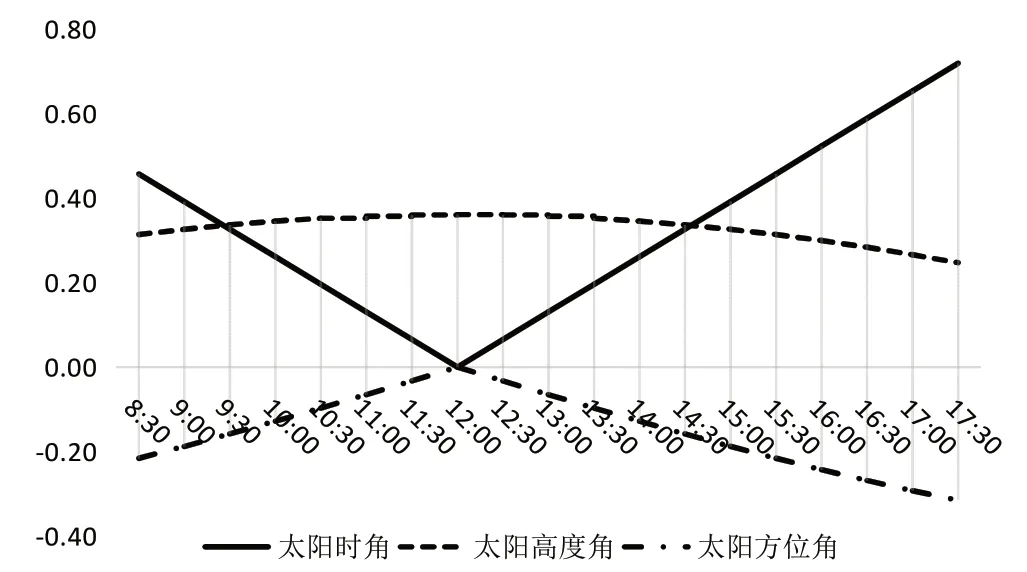
图5 一天之内太阳高度角H、方位角A及时角ω 的变化趋势
由图5 可知,在每天的正午时刻(12:00)太阳高度角和方位角达到最高值。按照计算得到的参数信息,建立数学模型,来确定太阳光线的向量,根据得到的向量数据求出法向量,对此法向量绘制折线图,并分解到三个坐标轴上,分别为(x)、(y)、(z)。对分解后的三个参数进行分析,从而计算得到定日镜的镜面角度所需要的调整值。分解后的向量参数值如图6所示。
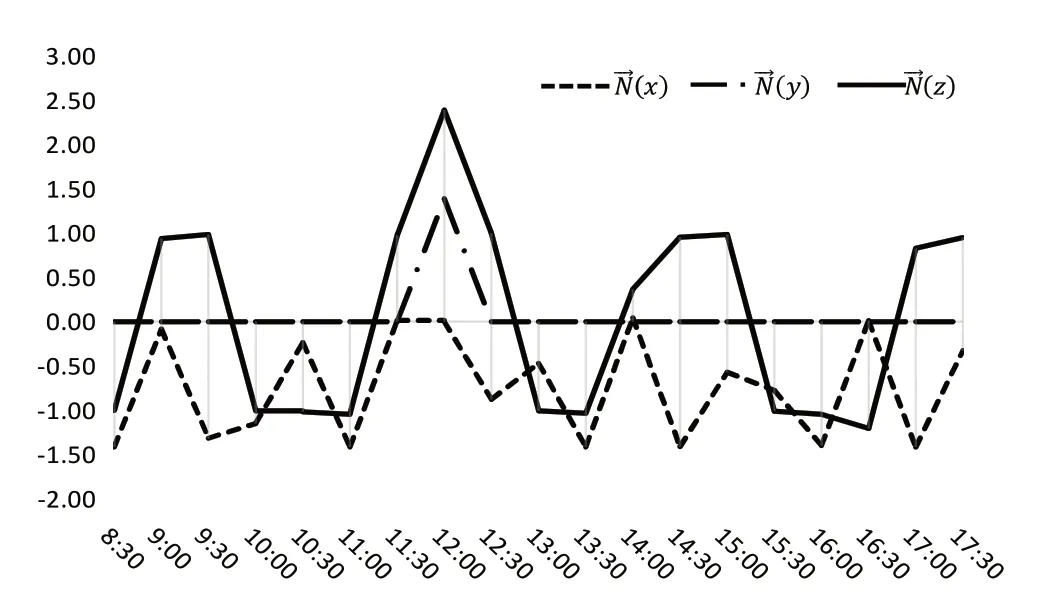
图6 分解后的向量参数值
得到了太阳光线的法向量,再按照定日镜面的法向量和太阳光线法向量相平行的基本原则,计算得到定日镜的镜面角所需要调整的角度。
4.3 实验现象
将定日镜系统置于光照之下,GPS模块的外置天线放在无遮挡和无干扰的环境之中,再调整定日镜的镜面来选取一个目标位置作为反射的基准点。通过串口将电脑和控制器进行连接,对GPS 模块进行初始化,在串口助手中查看GPS 模块的各项参数是否正常。做好一系列准备工作之后,将整个系统进行完整的连接。启动系统进行工作,记录镜面的变化角度,观测太阳光的反射位置是否在设定的范围之内。对每个角度调整后的反射点进行拍摄,对比每个反射点位的变化范围是否超出设定的要求。实验时上午10:00 和10:30,中午12:00 和 12:30 两组镜面的反射光点的位置的变化图,如图7所示。
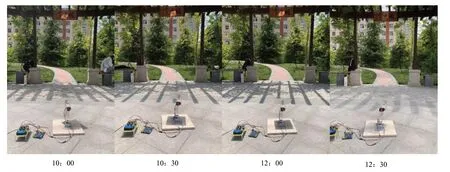
图7 反射光点的位置变化
通过光影可知太阳位置的变化,在太阳光线变化的过程之中,反射的光点始终在规定的范围之内。结合实验现象可以判断系统可以实现基本的功能。
5 结论
本设计为一种开环控制的定日镜,可以实现自动跟随太阳的旋转,通过反射作用,始终将太阳的光线反射在同一个位置来进行热量的收集。设计系统通过检测太阳光线的位置,把GPS 模块接收并解码的位置信息作为单片机的输入信号,单片机对接收到的参数信息进行处理和分析,最终转化为调节舵机角度的脉冲信号并输出到驱动舵机;舵机接受脉冲信号后按照设定的角度进行转动,通过调整定日镜镜面的水平角度与俯仰角度,达到自动调整反射光线位置的目的,实现了系统设计的基本功能。该系统具有跟踪精度高、抗干扰能力强等特点,提高了对太阳能的利用率,具有很广阔的市场应用前景。