基于IGWO组合模型的炮控系统健康预测方法
2023-07-05胡修宇李英顺王德彪刘海洋
胡修宇,李英顺,王德彪,刘海洋
(1.广西科技大学 自动化学院,广西 柳州 545000;2.大连理工大学 控制科学与工程学院,辽宁 大连 116200;3.沈阳顺义科技有限公司,辽宁 沈阳 110000)
坦克炮控系统包括高低向炮控分系统和水平向炮控分系统,主要由陀螺仪、炮控箱、调炮器、电机放大机和炮塔方向机等部件组成。陀螺仪组承担着火炮姿态的测量工作,需精确测量炮塔及火炮偏离稳定位置的角度与速度信号,并转换为直流电压量提供给炮控系统使用。当陀螺仪组出现故障,将直接影响了炮控系统的作战性能[1]。因此,对陀螺仪组进行健康预测尤为重要。健康预测作为故障预测与健康管理的一个重要部分,其目的在于根据当前的健康状态对设备健康度或剩余使用寿命进行有效的预测[2-3]。陀螺仪组内部由多块功能板组成,每块功能板在不同工作状态中表现出的性能衰退趋势也不同。因其自身的工作特点,采集故障数据相对不易,并且数据稀少或缺失。因此,寻求一种在设备不同部件的数据下进行分析与健康预测的方法尤为重要。
传统的健康预测方法中,回归模型计算简单,但对数据的平稳性要求较高[4];神经网络能够解决内部复杂机制的问题,但训练结果容易陷入局部最优值[5];支持向量机只适用于小样本分类,样本过多分类精度将会降低[6-7]。单一预测方法往往存在一定缺点,会产生不同的预测结果与误差。因此,组合预测模型便应运而生。
组合预测将多种预测方法进行组合,综合利用各种预测方法内有利的信息,尽可能提高预测精度[8-9]。文献[10]提出一种组合模型的电力负荷与发电量预测方法,结果表明,组合预测模型误差远低于单一模型。文献[11]使用的组合模型能够自适应的调节各单一预测模型的权重占比,从而获得较好的预测性能。笔者将融合自回归滑动平均模型(ARMA)[12]、径向基函数神经网络(RBFNN)[13]、最小二乘支持向量机(LSSVM)[14]3种方法的优势,使用IGWO搜索最优权重,建立组合模型。以炮控系统陀螺仪组内的温度传感器阻值与漂移度数据为例,进一步验证IGWO组合预测方法的有效性。
1 组合预测算法
1.1 灰狼优化算法(GWO)
灰狼优化算法(Grey Wolf Optimizer, GWO)是由Mirjalili等[15]提出的一种模拟灰狼狩猎行为的智能优化搜索算法,该算法具有收敛速度快、鲁棒性强等优点,能够实现全局优化搜索目的[16-18]。算法基本步骤如下:
步骤1灰狼等级分层。将灰狼个体适应度排序,前3个表现最好的设为α、β、δ狼,负责引导狼群搜索,剩余即为狼ω,负责寻找搜索路径。
步骤2包围猎物。灰狼在追踪猎物过程中,不断逼近形成包围,其模型表示为
D=C·XP(t)-X(t),
(1)
X(t+1)=XP(t)-A·D,
(2)
式中:t为当前迭代次数;X(t)为t次迭代后灰狼的位置;XP(t)为t次迭代后猎物的位置;A、C为系数向量。
A=2a·r1-a,
(3)
C=r2,
(4)
式中:r1、r2为[0,1]的随机向量;参数a为收敛因子,随着迭代次数从2线性下降到0。
在包围猎物过程中,灰狼搜索猎物可通过调整A、C的值实现,|A|表示A值的大小,当|A|>1时,表示灰狼远离猎物,需增大搜索空间,即为全局搜索;当|A|<1时,表示灰狼开始逼近猎物,即为局部搜索,逐渐接近最优解。
步骤3狩猎。在灰狼狩猎过程中,假设α、β、δ狼均为每次迭代最优解的前3头狼。其余灰狼个体将根据3头狼的指导,向猎物位置逐渐靠拢,其数学模型如下:
(5)
式中:Dα、Dβ、Dδ分别表示其余灰狼个体到α、β、δ狼的距离;Xα、Xβ、Xδ分别表示前3头狼的位置向量;X代表ω狼的位置向量。
(6)
(7)
式中:X1、X2、X3表示α、β、δ狼在当前迭代次数下的位置;A1、A2、A3表示α、β、δ狼的系数向量,X(t+1)表示ω狼在t次迭代后的位置。
由于灰狼算法通过求解多个最优解的方式,从而寻找最优的位置[19-20]。因此该算法在一定程度上容易陷入局部最优值。在实际应用中,往往需要对灰狼优化算法进行必要的改进,从而提高搜索能力与预测精度。
1.2 改进灰狼优化算法(IGWO)
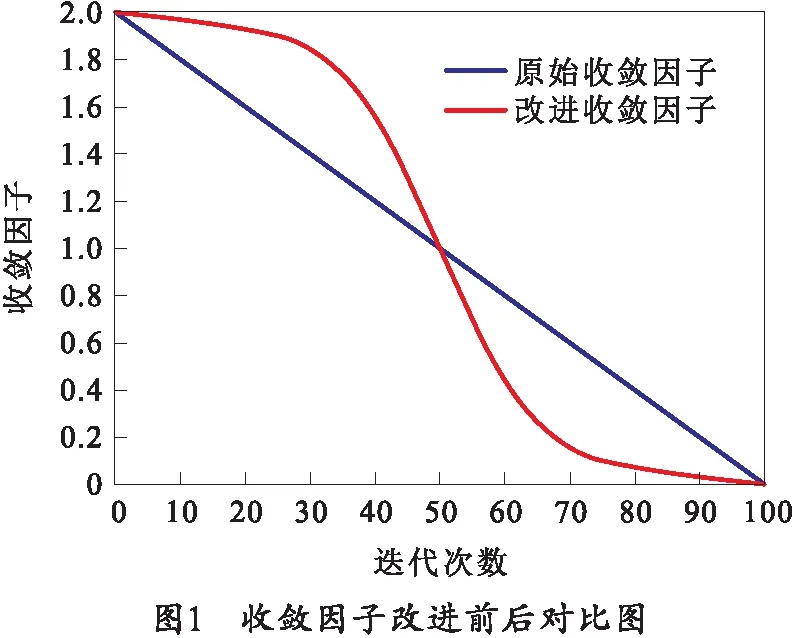
在灰狼优化算法中,从式(3)可以明显看出,优化过程中,A的值随着控制参数a的变化而变化,GWO的全局搜索和利用能力也取决于控制参数a。因其整个优化过程较为复杂,此时收敛因子a的线性迭代策略无法体现真实情况。因此,对收敛因子进行改进,其表示形式为
(8)
式中:aini为改进的非线性因子a′的起始值;aend为终止值;Tmax为最大迭代的次数;t为当前迭代次数。
传统的收敛因子和改进后的收敛因子对比如图1所示。可以发现,改进的收敛因子能够保证在迭代初期里能维持较大的收敛值,促使狼群能够以最大的步长来执行搜索,提高了全局搜索能力;在迭代的后期,改进的非线性收敛因子能够维持较小的数值,狼群能够以较小的步长搜索,增强了局部发展能力。因此,改进优化后的搜索策略可以更好地协调算法的全局搜索优化能力与局部搜索发展能力。
2 组合预测模型与方法
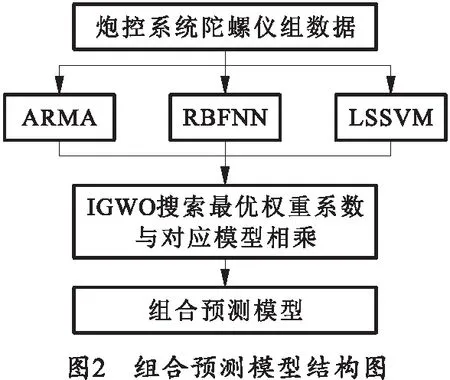
选择目前在健康预测中使用较多且表现较好的3种机器学习方法作为组合预测成员,分别为ARMA、RBFNN、LSSVM模型。通过使用3种单一模型建模,分别提取出时间序列数据的差分变化规律、周期性规律和其他复杂规律,充分利用3种预测模型的优势;再运用改进的灰狼优化算法搜索最优权重系数,将3种单一模型与对应权重值相乘,得到基于IGWO组合预测模型,进而对炮控系统陀螺仪组的两组数据进行健康预测。组合预测模型结构图如图2所示。
组合预测模型结果等于各单一模型的预测结果乘以适当的权重:
F=ω1fARMA+ω2fRBFNN+ω3fLSSVM,
(9)
式中:ω1、ω2、ω3为对应模型的权重,其和为1;fARMA、fRBFNN、fLSSVM为对应模型的预测值。
根据最优化理论,选取均方根误差函数(RMSE)作为IGWO的适应度函数。为了充分发挥预测模型的优势,将组合模型内的最优权重系数的问题转化为均方根误差函数最小化的优化问题。
(10)

改进灰狼优化算法的组合预测实现流程如下:
步骤1初始化狼群规模N。设置灰狼种群的成员数量,并初始化α、β、δ狼空间中的初始位置Xα、Xβ、Xδ,以及收敛因子A,扰动因子C,最大迭代次数tmax。
步骤2利用ARMA、RBFNN、LSSVM 3种单一模型预测,调整各单一模型参数,使其达到最佳的预测结果。

步骤4根据式(3)、(4)与(8),利用改进可调节非线性收敛因子a′,计算出系数向量A、C的值。
步骤5根据式(5)、(6)和(7),计算出下一轮迭代的α、β、δ狼的位置,以及最优解的位置。
步骤6判断IGWO是否达到最大迭代次数,如果达到,根据最优解的位置信息输出最优权重值。否则,转移到步骤3继续执行。如果达到最大迭代次数,则停止迭代。最后,将输出的最优权系数与各单一模型相乘,得到组合预测结果。
3 炮控系统健康预测分析
3.1 数据收集方法
炮控系统的水平向分系统主要包括:陀螺仪、炮控箱、电机放大机和调炮器等部件。为验证笔者提出的健康预测方法的有效性,选用某型坦克炮控系统内陀螺仪组作为研究对象。陀螺仪组部分信号说明如表1所示。
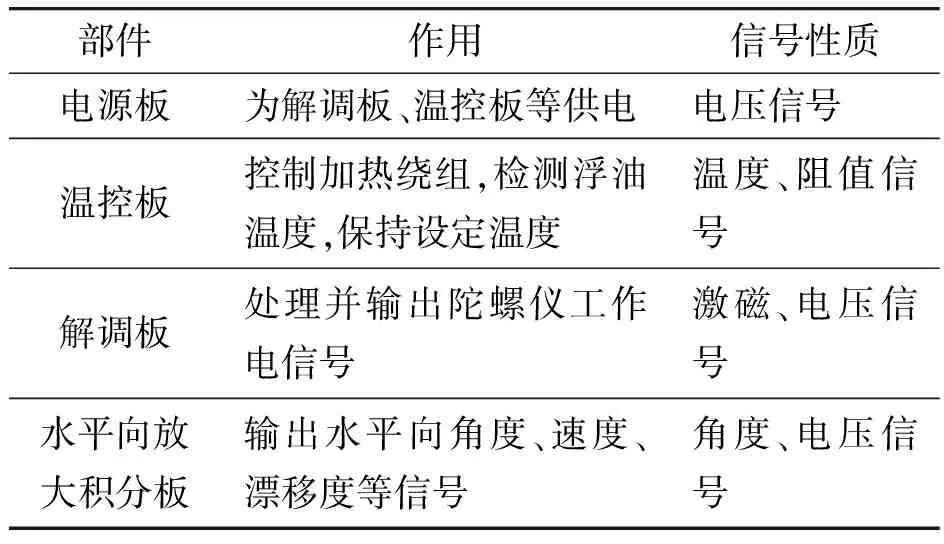
表1 陀螺仪组部分信号说明
在实际应用中,温度与漂移两项数据指标的状态,将直接关系到陀螺仪组内部件的寿命与精度,对陀螺仪组的性能影响较大。因此,笔者主要研究温度传感器阻值数据和漂移数据。
温度传感器阻值数据主要由温控板产生,温控板用于严格控制陀螺仪温度,保证陀螺仪内部温度的恒定和悬浮液密度的稳定。陀螺仪内的设定工作温度为(45±2)℃,最大不超过80℃。当内部感温元件和电路出现异常时,系统发生故障,必然导致陀螺仪温度数据出现误差,严重时将会引起陀螺仪失效。
陀螺仪漂移是衡量陀螺仪稳定性与精度的主要指标之一,部分漂移数据由水平放大积分板输出。若测试得到漂移数值超过一定的阈值(0.6(°)/h),则认为陀螺仪发生失效。陀螺在长期使用后,传感器、力矩器、陀螺电机等部件会产生电磁干扰,形成电磁干扰力矩,从而引发漂移误差。当放大积分板内部元件或电路发生异常时,也将引起角度值输出误差过大。另外,陀螺仪在经过长时间高速运转后,也可能出现旋转轴磨损,导致陀螺仪漂移,随着磨损的积累,漂移逐渐增加,最终导致陀螺仪失效。
温控板内的温控阻值数据与水平放大积分板输出的漂移数据可以在一定程度上反应陀螺仪健康状态,因此,笔者分别对两者进行健康度预测。
3.2 评价指标
笔者选用以下3种误差评价指标验证组合预测模型的有效性[21-22]。通过对预测结果计算分析,所得误差值越小,将表示模型的预测精度越高,各误差计算公式如下:
1)平均绝对误差(EMAE):
(11)
2)平均绝对百分比误差(EMAPE):
(12)
3)均方根误差(ERMSE)
(13)
3.3 实验结果及分析
采取温控板内温度传感器的阻值数据与水平放大积分板的漂移数据,阻值数据包含陀螺仪工作在设定温度极限值附近的阻值,漂移数据包含陀螺仪在最大阈值附近的漂移度数。两组数据分别取100组。
分别设置各预测模型的参数,基于ARMA方法,设置模型的p=1、q=3;基于RBFNN方法时,设置对应的输入维数为3、隐节点数为6、输出层节点数为1;基于LSSVM方法,核函数为径向基函数,设置惩罚系数c的参数设置为0.1~15.0。分别验证ARMA、RBFNN和LSSVM 3种单一模型的预测效果,其ERMSE误差评估指标对比如表2所示,可以看出,不同的预测模型表现各有优劣。在温控阻值中RBFNN取得了较好的预测性能,在漂移度预测中ARMA表现出较优的预测性能。
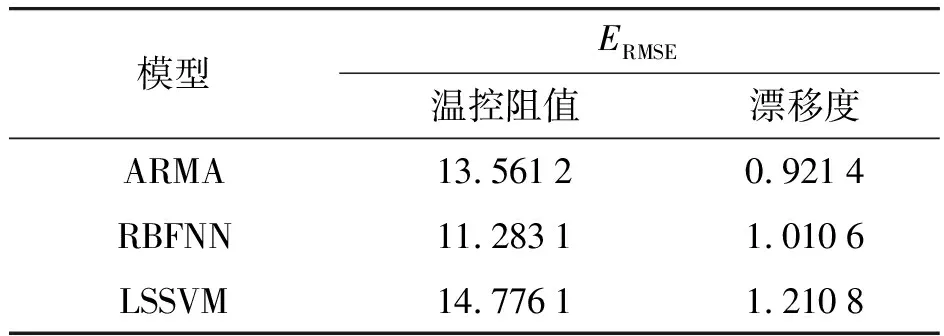
表2 3种模型预测结果的ERMSE误差对比
基于IGWO组合预测方法时,设置灰狼种群数量为30,最大迭代次数设置为100次,参数A、α′根据式(3)和(8)生成。为了避免单次实验结果产生的偶然性与误差性,将进行10次重复实验,在10次计算结果中选取最佳的适应度函数值作为组合模型最优权重值,经过实验计算,得到各单一模型的权重值如表3所示。

表3 IGWO组合预测获得的权重结果
为全面评估提出模型的预测性能,选择GWO组合预测模型作为基准模型进行对比展示。基于GWO组合预测、IGWO组合预测在2种不同数据下的收敛速度对比如图3、4所示。
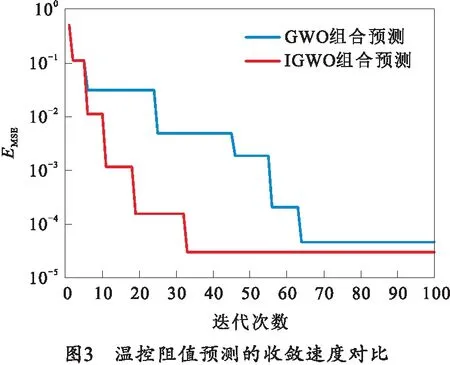
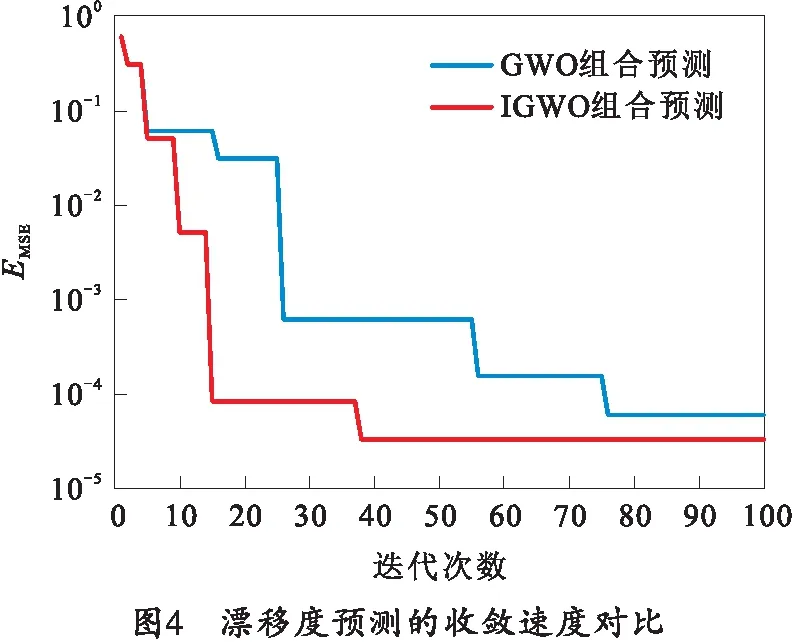
基于IGWO组合预测采用改进收敛因子的方法,可以实现跳过局部最优值,在适应度函数评估中都优于GWO组合预测算法。因此,在整个收敛过程中,IGWO组合预测算法加快了收敛速度,综合提高了算法的搜索性能,进一步增强了陀螺仪组健康预测的效果。
本次实验除了选择ARMA、RBFNN、LSSVM与GWO组合预测模型对比之外,还使用文献[22]中诱导有序几何加权平均算子(IOWGA)组合预测模型作为比较,其组合模型包括灰色GM(1,1)、长短期记忆神经网络(LSTM)、自回归滑动平均(ARMA)3种单一模型。
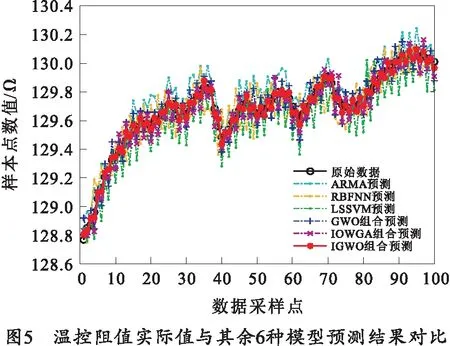
以温度传感器阻值预测结果为例,对比结果如图5所示,可以发现,随着时间的推移,6种预测模型均可以反映数据的变化趋势,但部分模型预测结果逐渐偏离原始数据。相同时间点基于LSSVM的预测结果偏离最大,而基于IGWO组合预测的曲线相对于原始数据波动较小,预测结果的精度也优于IOWGA组合模型,较好地反应了温度传感器的阻值在故障阈值前的数据变化趋势,初步证实了笔者提出方法的优越性。
漂移度的预测结果对比如图6所示,由图6可知,部分单一模型在漂移度预测中容易存在延迟滞后现象,预测效果不佳,其中RBFNN模型预测误差相对较大。而基于IGWO组合预测模型比IOWGA组合模型具有更高的拟合度,能够反应出实际数据的变化趋势。

为了更加清晰地展示对比结果,图7表示了在MAE评价指标下,各单一模型与组合模型的误差结果比较。EMAE的值越小,代表预测性能越好。可以看出,在温度传感器阻值与漂移度预测中,IGWO组合预测算法的EMAE均最小,其预测性能相比较于其他5种模型有较大的提升。

表4列举了部分最优的单一模型与组合模型的误差评价,可以看出,IGWO组合预测模型的EMAPE、ERMSE值相对于其余两种组合模型来说均为最小值,进一步体现了该组合预测算法较优的预测效果。

表4 温控阻值与漂移度的预测评价表
为了进一步验证笔者提出的健康预测方法的有效性,选取剩余使用寿命(Remaining Useful Life,RUL)[23-24]指标作为故障发生点时刻,利用绝对误差ΔRUL与相对误差δRUL对各模型所预测的RUL值分析比较,进一步体现健康预测的准确性,具体公式如下:
ΔRUL=|Rpred-Rreal|,
(14)
(15)
式中:Rpred表示RUL预测值;Rreal表示RUL实际值。
在本项实验中,温度传感器阻值选取的故障阈值为130 Ω,经过计算,当Rreal=89时,温控阻值达到故障阈值;漂移度选取的故障阈值为0.6(°)/h,经过计算,当Rreal=97时,漂移度达到故障阈值。
6种预测模型的RUL预测值与RUL实际值的相对误差对比如图8所示。由图8可知,在漂移度预测中,IGWO组合预测的相对误差仅为1.03%,预测效果最佳,更能体现预测故障阈值的准确性。表5列举了单一模型与组合模型RUL预测结果的相对误差对比,由表5可知,IGWO组合模型的预测相对误差结果均小于其余组合模型,能够更好地体现出陀螺仪组内部件性能退化趋势的准确性。
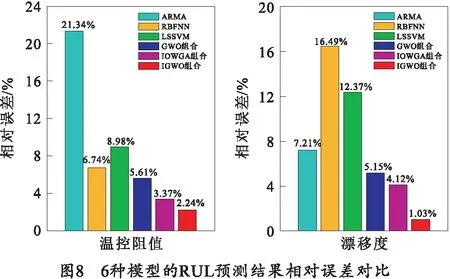

表5 陀螺仪组的健康预测结果及相对误差
4 结束语
笔者通过改进灰狼优化算法的收敛因子,提高了算法的全局搜索能力和局部搜索能力,并对ARMA、RBFNN、LSSVM单一模型进行组合寻优,综合考虑各模型的复杂变化规律,计算出最优权重系数,得到IGWO组合预测模型。将炮控系统陀螺仪组的温度传感器阻值数据与漂移度数据分别带入单一模型和组合模型内进行分析和预测,同时对陀螺仪组的RUL健康指标进行误差分析。实验结果表明,IGWO组合预测模型能够提高炮控系统内陀螺仪组的健康预测准确性,可以及时了解和掌握陀螺仪组内各部件的健康水平,有利于发现设备早期故障趋势,及时排除设备隐患,增加设备使用寿命,为提高装备的战备完好性及作战效能具有一定的实际意义。
