一种用于MCP 成像探测器降噪的数字滤波器
2023-06-25窦双团付利平贾楠王天放
窦双团,付利平,4,贾楠,4,王天放,4
(1.中国科学院国家空间科学中心,北京 100190;2.中国科学院大学,北京 100190;3.北京天基空间环境探测重点实验室,北京 100190;4.空间环境态势感知科技重点实验室,北京 100190)
近年来,由于空间科学的高速发展,极远紫外光辐射探测成为针对行星大气气辉、极光探测的重要探测手段.远紫外波段气辉、极光辐射强度低,能量通常小于10−17W,可视为单光子级别,因此,基于MCP电子倍增电荷分割型阳极的成像探测器(以下简称为探测器)成为针对该类微弱信号探测的首选探测器,如TIMED 卫星GUVI 载荷、2019 年发射的ICON卫星上FUV 载荷等[1−3],我国卫星计划包括FY-4 电离层成像光谱仪、极光成像仪、嫦娥7 号的极紫外相机等项目,包括规划中的太阳系边际项目、木星探测等均采用基于MCP 电子倍增的阳极探测器,由此可见,该探测器在空间探测的方面有着极广的应用前景.随着空间天气研究的深入,对探测载荷的空间分辨率、光谱分辨率、信噪比提出更高的要求,对探测器成像质量要求进一步提升,探测器观测信号信噪比的大小直接影响探测器入射事件位置解码准确度,最终影响探测器成像质量.因此,如何降低探测器噪声、提高探测器信噪比将是实现这类载荷高精度探测持续应解决的问题.
探测器观测信号主要受到探测器读出电路的热噪声、散粒噪声、量化噪声、闪烁噪声等高斯和非高斯噪声的污染,降低了探测器观测信号信噪比[4].为提升探测器性能,对探测器的观测信号降噪变得尤为关键.传统的基于模拟电路的降噪措施包括: ①增大探测器的偏压电阻和读出电路前置放大器的反馈电阻可以减小热噪声[5];②允许探测器工作在低计数率时,对于固定的电压、电流噪声谱密度以及探测器电容,通过寻找读出电路不同噪声分布曲线的交叉点,根据此交叉点设计读出电路元件数值可以获得给定条件下的最佳信噪比[6−8];③增加半高斯整形滤波电路的阶数,可以减小闪烁噪声和前置放大电路输出信号的噪声[9];④利用具有噪声整形功能的模数变换器 (analog to digital converter,ADC)对观测信号采样可以提升被采样信号的信噪比[10].
常用的针对探测器观测信号的模拟电路滤波环节处于数据采集系统对观测信号采样前,没有充分考虑后续电路引入的噪声.为进一步减小噪声,可以考虑在信号采样之后使用数字滤波器对观测信号进行降噪处理.近年来,随着微电子技术的发展,数字滤波器常用于观测信号降噪,如张志广等[11]利用小波变换抑制了离子迁移谱信号中的噪声,有效提高了信号的信噪比;王向周等[12]利用基于新息自适应估计滤波器提高了噪声的统计特性精度,有效过滤了信号中的噪声、提高了运动目标的测量精度;ALBERTO 等[13]采用数字滤波器对采样后的观测信号进行降噪处理,文中对比了巴特沃斯滤波器、切比雪夫滤波器、贝塞尔滤波器和LMS 滤波器对相同观测信号的降噪效果,结果表明LMS 滤波器的输出信号具有更高的信噪比,且LMS 滤波器输出信号的峰值更接近期望信号的峰值.ALBERTO 等[13]使用的LMS滤波器是一种基于最小均方误差准则,广泛应用于非平稳环境下噪声消除的自适应滤波器[14−15].LMS滤波器相较于其他自适应滤波器表现出较慢的收敛速度[16−17],当探测器工作环境剧烈变化时,会影响系统的探测效率.为此,本文提出一种基于RLS 滤波器和MA 滤波器的降噪方法,该方法在保证降噪效果的同时能快速收敛,提高探测效率.由于探测器输出信号处于非平稳环境,因此利用RLS 滤波器对非平稳环境的自适应能力,首先使用RLS 滤波器对观测信号进行初级滤波,滤波后的信号输入MA 滤波器进行平滑处理,最终得到高信噪比的输出信号供探测器位置解码使用.为测试RLS-MA 滤波器的降噪能力,利用Maltab 对不同信噪比的观测信号使用RLSMA 滤波器进行降噪仿真,并将仿真结果与LMS、RLS以及MA 滤波器的降噪效果进行对比,结果表明本文提出的RLS-MA 滤波器输出信号具有更高的信噪比和更小的信号峰值均方根误差.
1 信号模型和RLS-MA 滤波器原理
1.1 信号模型
基于电荷分割型阳极的极远紫外MCP 成像探测器主要由光阴极、MCP 堆、电荷分割型阳极以及读出电路组成.位于探测器前端的光阴极将入射的单光子转换为电子后被MCP 堆倍增为106~107量级的电子云,从MCP 堆出射的电子云被电荷分割型阳极的不同电极收集后由读出电路进一步处理.读出电路主要由电荷灵敏前置放大器、零极相消电路、半高斯整形滤波电路组成.其中,读出电路的电荷灵敏前置放大器主要负责将探测器输出的电流脉冲转换为负指数衰减的电压脉冲;零极相消电路将前置放大器输出的负指数衰减脉冲的拖尾缩短,减小系统的脉冲堆积;滤波整形电路将零极相消电路的输出脉冲整形为便于后续数据采集系统采集的准高斯脉冲,同时滤除前级电路输出信号的噪声.探测器读出电路和数据采集系统的信号模型以及信号波形示意图如图1 所示.
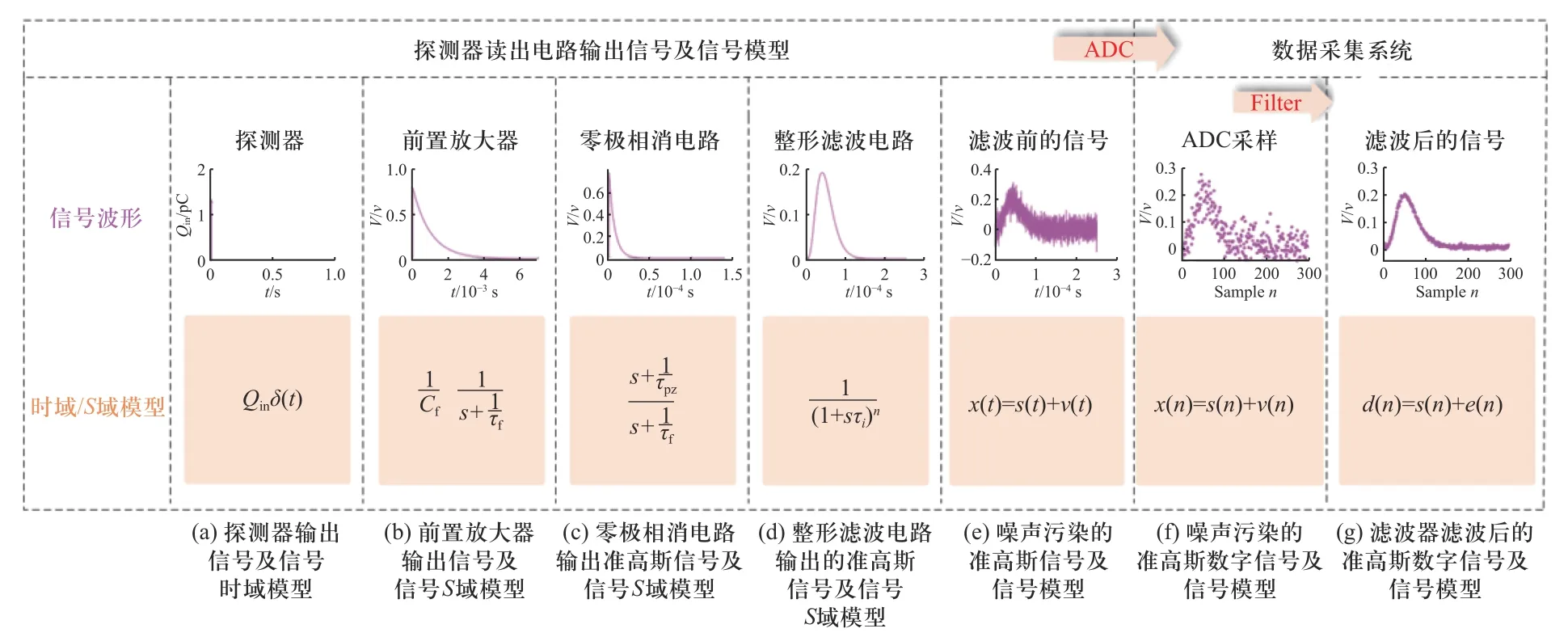
图1 探测器读出电路和数据采集系统的信号模型以及信号波形示意图Fig.1 Schematic illustration of the signal model and waveform of the detector readout circuit and data acquisition system
图1 所示探测器信号传输模型从左到右分别为:探测器输出电流脉冲的时域波形以及时域模型(图1(a));图1(b)、~图1(d)分别表示探测器读出电路的电荷灵敏前置放大器、零极相消电路、半高斯整形滤波电路的输出波形以及相应的S域模型;为模拟探测器读出电路期望信号受到的噪声干扰,本文对图1(d)所示的准高斯信号添加高斯白噪声模拟探测器读出电路输出的观测信号,其波形示意图和信号模型如图1(e)所示;图1(f)表示经过数据采集系统的ADC 采样后未使用数字滤波降噪的数字脉冲序列;从图1(f)中可以看出,被噪声污染的观测信号峰值偏离期望信号峰值,不对其进行降噪处理会影响后续探测器入射事件位置解码的准确度.为尽可能准确地获取期望信号的峰值,可以采用数字滤波器对观测信号进行降噪,最终获得接近期望信号峰值的信号,如图1 (g)所示.
1.2 RLS-MA 滤波器原理
本文采用的RLS-MA 滤波器是一种级联结构的滤波器,该滤波器首先利用RLS 滤波器对观测信号进行初步滤波,滤波后的信号峰值与期望信号相比,还存在峰值过冲,为减小RLS 滤波器输出信号的峰值过冲,将RLS 滤波器的输出信号再次输入MA 滤波器进行平滑处理,最终得到高信噪比的信号.RLSMA 滤波器的结构如图2 所示.

图2 RLS-MA 滤波器结构框图Fig.2 Schematic of RLS-MA filter
如图2 所示,RLS-MA 滤波器主要由加法器、延迟单元、RLS 滤波器自适应抽头更新机制以及MA滤波器组成.在使用滤波器对观测信号进行降噪时,由于不存在期望信号s(n)以及噪声信号v(n)的先验信息,所以无法直接将s(n)和v(n)从观测信号x(n)中分离.但是通过设计一个和s(n)相关、和v(n)不相关的信号,利用该信号和s(n)的相关性将其输入RLS 滤波器滤波,RLS 滤波器的输出信号作为期望信号s(n)的估计值就可以实现s(n)和v(n)的近似分离[18].
在本文使用的信号模型中,s(n)是窄带信号,v(n)是宽带信号,且s(n)和v(n)不相关.因此,如图(2)所示,可以将x(n)延时m(m≥1)个样本后得到x′(n),延迟后的信号x′(n)和s(n)相关、和v(n)不相关,故可将x′(n)作为参考信号输入RLS 滤波器进行降噪,RLS滤波器的输出信号s0(n)作为期望信号s(n)的初步估计值,信号s0(n)和期望信号s(n)相比,还存在峰值过冲,为进一步降低信号s0(n)中所含的噪声成分,将信号s0(n)输入MA 滤波器进行平滑处理,最终MA 滤波器输出高信噪比的、接近期望信号s(n)峰值的信号s′(n)供后续探测器位置解码使用.
2 仿真测试及仿真结果分析
2.1 评价指标
为了定量分析比较不同滤波器的降噪效果,本文采用以下常用评价指标对降噪前后的信号进行对比分析.
①信噪比SNR(以下用RSN表示):信噪比的计算公式如下所示[19]
式中:s(n)为期望信号;s′(n)为期望信号的估计值;N为信号的样本长度.
②信号均方根误差RMSE(以下用ERMS表示):信号的均方根误差定义如下所示[20]
探测器期望信号待提取的信息是信号的峰值,滤波器输出信号峰值和期望信号的峰值差的大小直接影响探测器入射事件位置解码的准确度.因此除了使用滤波器输出信号的均方根误差评估滤波器降噪性能,还应该比较不同滤波器输出信号峰值和期望信号峰值的均方根误差,该指标可以用于评估不同滤波器输出信号和期望信号峰值的接近程度.信号峰值的均方根误差越小,表明滤波器输出信号的峰值和期望信号的峰值越接近.信号峰值的均方根误差的定义如下所示
式中:L为滤波器输出信号峰值的数量:vp(i)为期望信号的第i个脉冲峰值:为滤波器输出信号的第i个脉冲峰值.
2.2 仿真结果分析
为测试本文提出的RLS-MA 滤波方法的降噪效果,本文选择幅度随机分布于0.2~2.0 V 之间的100个未受到噪声干扰的准高斯脉冲作为期望信号s(n),对期望信号s(n)分别添加了−10,−5,0,5,10,15,20 dB的高斯白噪声模拟受到不同程度噪声污染的观测信号x(n).针对相同的观测信号x(n),分别使用LMS、RLS、MA 以及RLS-MA 滤波器对其进行降噪处理,不同滤波器的输出信号根据2.1 节的评估准则进行对比分析.
根据式(1)的信噪比计算公式,不同滤波器输出信号的信噪比以及信噪比提升量对比图如图3(a)、3(b)所示.图中信噪比提升量定义为滤波器输出信号信噪比减去观测信号信噪比.图3 中观测信号信噪比以及不同滤波器输出信号的信噪比以及信噪比提升量的具体数值详见表1.
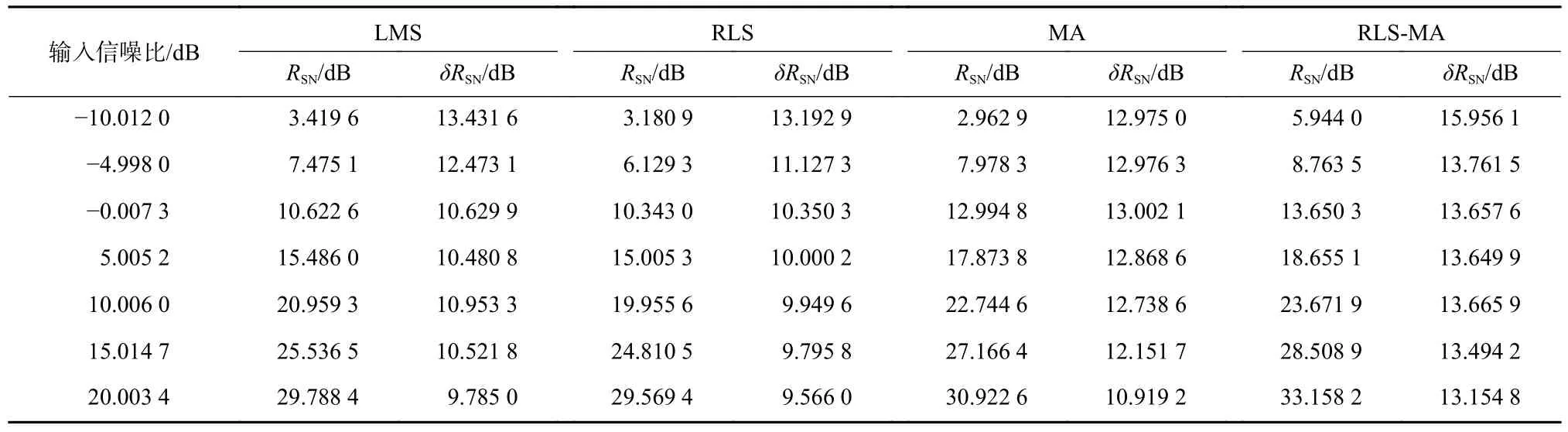
表1 不同滤波器输出信号信噪比以及信噪比增量Tab.1 The SNR and SNR increment of the signal output from different filters
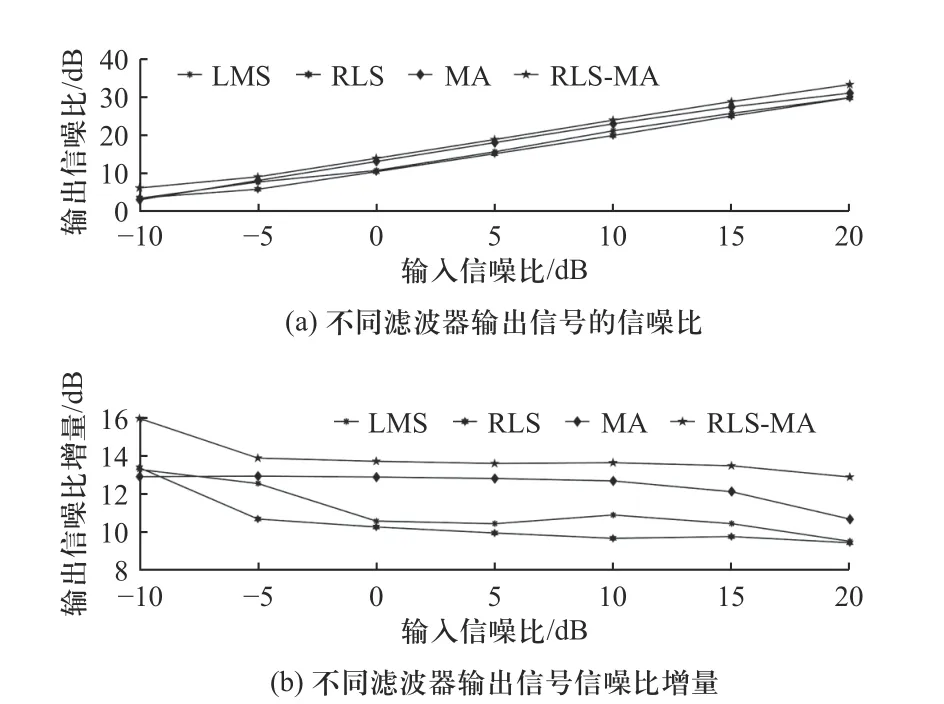
图3 不同滤波器输出信号信噪比以及信噪比增量对比图Fig.3 Comparison of the output signal SNR and SNR increment for different filters
如图3(a)所示,图的横坐标表示观测信号信噪比,纵坐标表示不同滤波器输出信号信噪比.当观测信号受到不同程度的噪声污染时,本文提出的RLS-MA滤波器输出信号的信噪比均大于其他滤波器输出信号的信噪比,表明RLS-MA 滤波器降噪能力在测试的信噪比范围内均优于本文对比的其他滤波器.不同滤波器的输出信噪比增量如图3(b)所示,图3(b)的横坐标表示观测信号信噪比,纵坐标表示不同滤波器输出信号信噪比提升量.当观测信号信噪比−10 dB时,RLS-MA 滤波器的信噪比提升量远大于其他滤波器的信噪比提升量,观测信号信噪比为−5~20 dB时, RLS-MA 滤波器信噪比提升量无太大波动,表明RLS-MA 滤波方法在观测信号具有较低的信噪比时(−10 dB 附近),RLS-MA 滤波器的降噪优势更为明显,在中等信噪比范围内滤波器的降噪性能更稳定.
根据式(2)、(3)的信号均方根误差和信号峰值均方根误差的计算公式,不同滤波器输出信号均方根误差以及信号峰值均方根误差对比图如图4 所示.图4 中不同滤波器输出信号的均方根误差以及输出信号峰值均方根误差的具体数值详见表2.
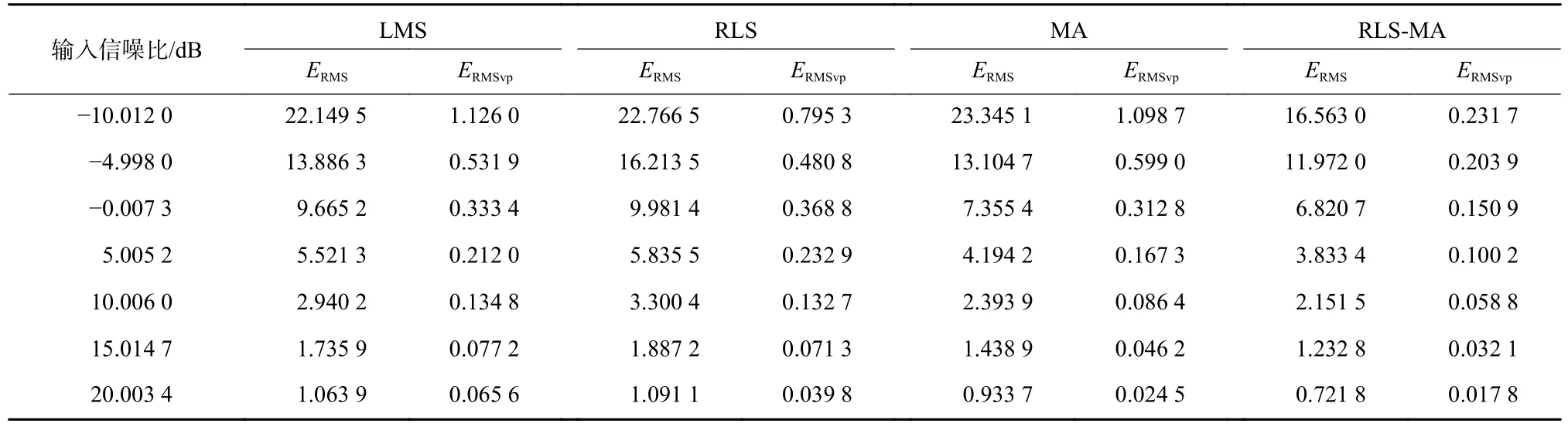
表2 不同滤波器输出信号以及信号峰值的均方根误差Tab.2 The signal and RMSE of signal peak output from different filters
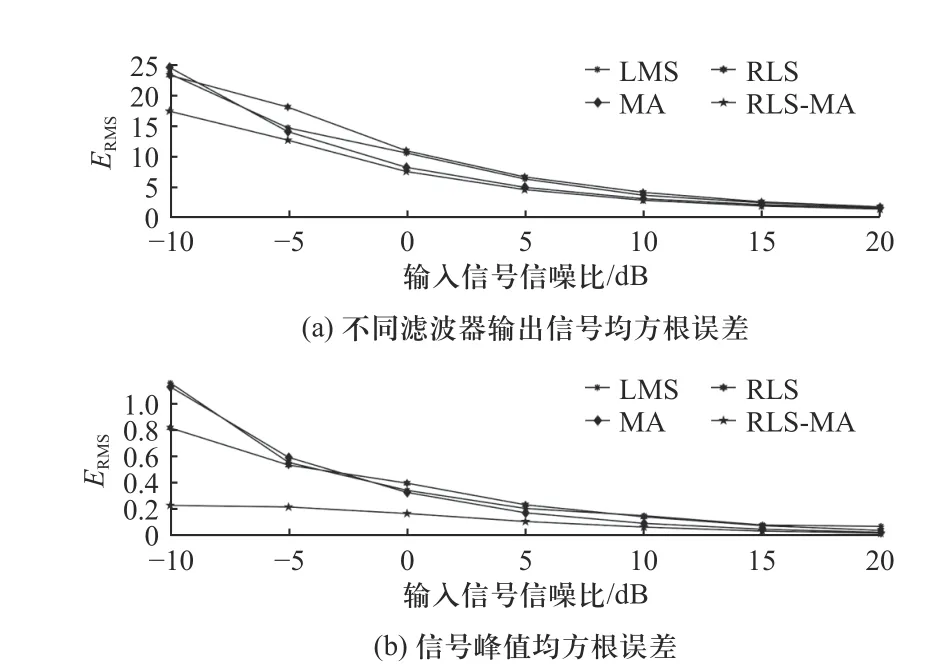
图4 不同滤波器输出信号均方根误差以及信号峰值均方根误差对比图Fig.4 Comparison of signal root mean square error and peak root mean square error for different filters
图4(a)的横坐标表示观测信号信噪比,纵坐标表示不同滤波器输出信号的均方根误差.如图4(a)所示,不同滤波器输出信号的均方根误差均随着观测信号信噪比的增加而降低.在整个信噪比测试范围内,RLS-MA 滤波器输出信号均方根误差均小于其他滤波器输出信号的均方根误差,表明RLS-MA滤波器输出信号具有更少的残留噪声.观测信号信噪比从0~20 dB 变化时,不同滤波器输出信号均方根误差的差异随着观测信号信噪比的增加而减小,信噪比越高越难以直观地区分上述不同滤波器降噪性能的优劣,此时使用滤波器输出信号峰值的均方根误差更有助于对比出不同滤波器降噪能力的优劣.
如图4(b)所示,RLS-MA 滤波器相较于其他滤波器输出信号的峰值均方根误差更小,表明本文提出的RLS-MA 滤波器输出信号和期望信号的峰值更接近,在探测器后续入射事件位置解码时具有更高的解码准确度.RLS-MA 滤波器相较于其他滤波器输出信号的峰值均方根误差曲线在整个的测试信噪比范围内波动更小,表明RLS-MA 滤波方法在测试信噪比范围内保持更稳定的信号峰值“跟踪”能力.由于探测器输出信号最重要的信息是信号的峰值,因此,在核探测领域,使用信号峰值均方根误差更有助于区分不同滤波器用于探测器观测信号降噪性能的优劣.下文中对比不同滤波器降噪性能的优劣时均使用信号峰值均方根误差来评估滤波器降噪效果.
实际探测器输出信号信噪比为10 dB 左右,为了深入了解不同滤波器对探测器输出信号的降噪细节,本文对信噪比为10 dB 的观测信号使用上述不同滤波器进行降噪研究.未受噪声干扰的期望信号s(n)以及受到高斯白噪声污染的观测信号x(n)分别如图5(a)和5(b)所示.为了更清楚地观察不同滤波器输出信号对比的细节,在不影响结论的情况下,本文展示了100 个测试脉冲的前50 个脉冲.
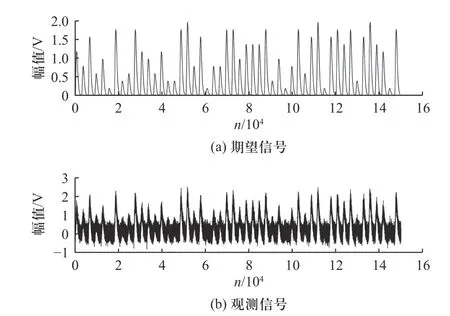
图5 探测器期望信号和受到噪声污染的探测器观测信号对比图Fig.5 Comparison of the expected signal with the contaminated signal output from the detector
如图5(b)所示,期望信号受到10 dB 的噪声污染时,观测信号x(n)的峰值严重偏离期望信号s(n)的峰值,信号严重失真,该影响在期望信号幅度较低时(<0.5 V)尤为明显.忽略观测信号的噪声会严重影响探测器入射事件位置解码准确度,进而降低探测器的成像质量.
为了最大限度从观测信号中还原期望信号的脉冲峰值信息,提高探测器入射事件位置解码的准确度.本文采用LMS、RLS、MA 以及RLS-MA 滤波器对信噪比为10 dB 的观测信号进行降噪处理,降噪后不同滤波器的输出信号如图6 所示.
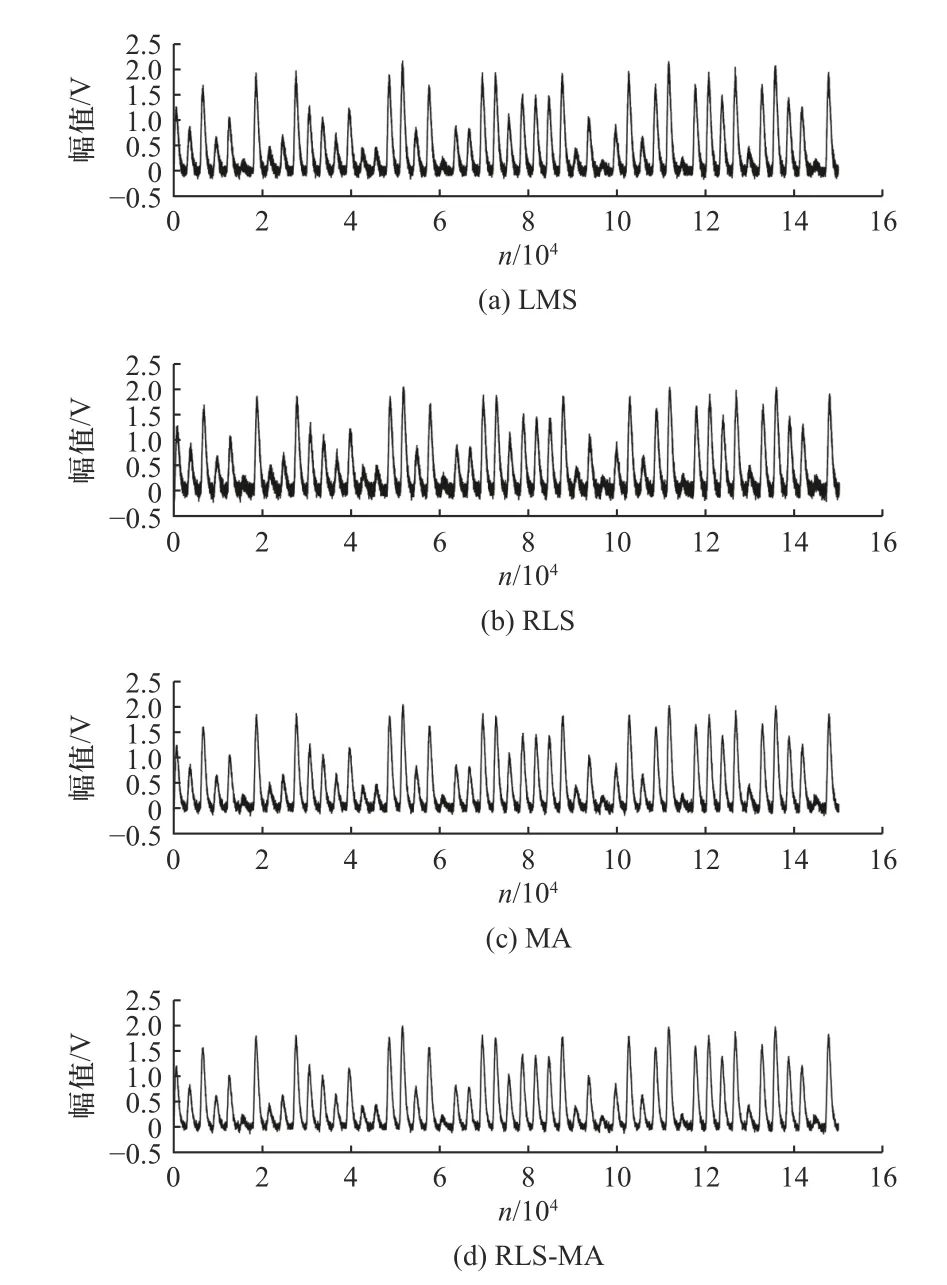
图6 不同滤波器输出信号和期望信号对比图Fig.6 Comparison of the expected signal with the contaminated signal from the detector with different filters
对比图6(a)~6(d)的LMS、RLS、MA 以及RLSMA 滤波器的输出信号与图5(a)的期望信号可以看出:RLS-MA 滤波器输出信号具有更少的残留噪声、信号更光滑,与期望信号最接近.观测信号信噪比为10 dB 时,RLS-MA 滤波器输出信号的信噪比提升量为13.665 9 dB,大于LMS 滤波器的10.953 3 dB、RLS滤波器的9.949 6 dB 以及MA 滤波器的12.738 6 dB;RLS-MA 滤波器输出信号脉冲峰值的均方根误差为0.058 8,小于LMS 滤波器的0.134 8,RLS 滤波器的0.132 7 以及MA 滤波器的0.086 4.结合不同滤波器输出信号信噪比和信号峰值均方根误差的对比结果可发现,RLS-MA 滤波器的降噪能力和对期望信号峰值的“跟踪”能力都优于本文对比的其他滤波器,使用RLS-MA 滤波器对探测器的观测信号降噪能获得更高位置解码准确度和更好的成像质量
3 结 语
本文提出了一种基于RLS 滤波器和MA 滤波器、应用于星载电离层MCP 成像探测器观测信号降噪的新方法.通过对比RLS-MA 滤波器和LMS、RLS 以及MA 滤波器用于不同信噪比的观测信号降噪效果,得到以下结论:
①RLS-MA 滤波器输出信号的信噪比大于本文对比的其他滤波器输出信号的信噪比、输出信号的均方根误差小于其他滤波器输出信号的均方根误差,表明RLS-MA 滤波器的降噪能力优于本文对比的其他滤波器,RLS-MA 滤波器用于辐射探测器输出信号降噪更具优势.
②针对观测信号降噪时,通常使用信号的均方根误差来评估滤波器输出信号和期望信号的差异.本文的研究中发现,对MCP 电子倍增电荷分割型阳极成像探测器的观测信号降噪时,使用信号峰值的均方根误差评估不同滤波器用于观测信号降噪性能优劣的区分度大于使用信号的均方根误差,因此在探测器领域推荐使用滤波器输出信号峰值的均方根误差来对比评估不同滤波器降噪性能的优劣.
