基于多方法融合的锂离子电池SOC-SOH 联合估计
2023-06-25王志福罗崴闫愿李仁杰
王志福,罗崴,闫愿,李仁杰
(1.广西科技大学 电气电子与计算机科学学院,广西,柳州 545000;2.北京理工大学 电动车辆国家工程研究中心,北京 100081)
在碳达峰的国家战略背景下,国家提出了《新能源汽车产业发展规划(2021−2035 年)》,助力新能源汽车高速发展.其中动力电池是新能源汽车的“心脏”,而动力电池中的锂离子电池又是各学者争相研究的热门领域.由于锂离子电池与其他电池相比具有高能量密度、充放电速度快和输出功率大等优点[1],因此被人们大规模使用.在电动车辆实际运行的过程中,电池不可避免地存在功率密度低以及充放电循环寿命短等问题[2],需要电池管理系统(battery management system, BMS)对电池的输出、运行状态、安全性能等进行长时间的监控,因此锂离子电池状态估计也成为BMS 的核心功能.而电池的荷电状态(state of charge, SOC)估计与其当前时刻的健康状态state of health, SOH)息息相关,而随着电池老化的加深,电池的SOH 势必会发生改变,则电池总容量是减小的.因此,对于内部机理复杂的锂离子电池,用扩展卡尔曼滤波[3]、模糊逻辑法[4]、支持向量机(support vector machines, SVM)法[5]、反向传播(back propa gation, BP)神经网络[6]等传统的单一算法[7]来讨论电池的SOC 或SOH 估计时会出现较大的误差,且SOC的初值难以确定,同时估算精度不高,所以通常与其他方法组合[8].虽然利用分数阶模型[9]可以获取开路电压进行SOH 估计,但是增大计算量的同时仍会带来较大误差[10].钟景瑜等[11]提出用随机片段对数据处理,然后用粒子群优化算法进行求解,扩展卡尔曼滤波算法来进行估计,虽然准确率高,但是估计误差任然较大.王志福等[12]提出自适应无迹卡尔曼滤波法(adaptive unscented-kalman filter, AUKF)和滤波法(H infinity filtering, HIFF)的联合算法应用到SOC 估计,虽然估计的误差小于2%,但是只考虑了单一特定噪声干扰的情况,不适用于长时间序列的情况.Plett 教授[13]以扩展卡尔曼(extended kalman filter, EKF)算法作为基础,使用了两个滤波器进行联合,其中一个完成状态参数辨识过程,另一个则完成之后的状态估计,开辟了不同种状态联合估计的全新领域.凌珑[14]设计了基于 SOC 估计误差绝对值最小以及基于概率的方法来融合 ACKF 与 AHCKF 的进行SOC估计,对于电池的联合估计策略,能够对电池参数进行实时辨识,确保模型的准确性和有效性[15],让融合算法结合两者的优点使SOC 估计更精准.改进的长短期记忆循环神经网络虽然不需要建立电池的等效电路模型,但只在脉冲大倍率放电工况下估计效果好,缺乏通用性[16].因此本文作者提出了基于(PSODBN)- AEKF/AHIFF 的SOC 估计及基于CNN 的SOH估计融合的联合算法,在时间长且数据样本大时,若不考虑SOH 进行SOC 估计会使得SOC 估计误差越来越大甚至发散,要想保证电池SOC 估计结果的准确性,对SOC 与SOH 进行联合估计具有很大的必要性.为了提高估计精度,将多种算法的思想进行融合,不仅结合粒子群算法选择合适的权重进行分配,充分利用各个时刻的新息,还结合AEKF/AHIFF 算法避免精度免受电池工况等影响的同时很好的抑制噪声.该算法不依赖电池经验模型,具有较强的通用性,而联合估计不仅可以表征实时更新需要估计的参数且在噪声的环境中对电池估计的效果依然很好,更符合实际工程应用.由于电池SOC 与SOH 具有不同的时变特性,因此以验证工况中的充电阶段的时间序列数据作为SOH 估计输入,以验证工况中的工况循环放电阶段的采样时刻数据作为SOC 估计输入,完成SOC 与SOH 特性的耦合分析.
1 实验数据采集与预处理
1.1 实验数据采集
文中以某公司生产的标定容量为1 000 mAh 的聚合物锂电池作为试验对象,该电池参数如表1 所示.电池试验平台由上位机、电池充放电检测设备、高低温实验箱等组成.
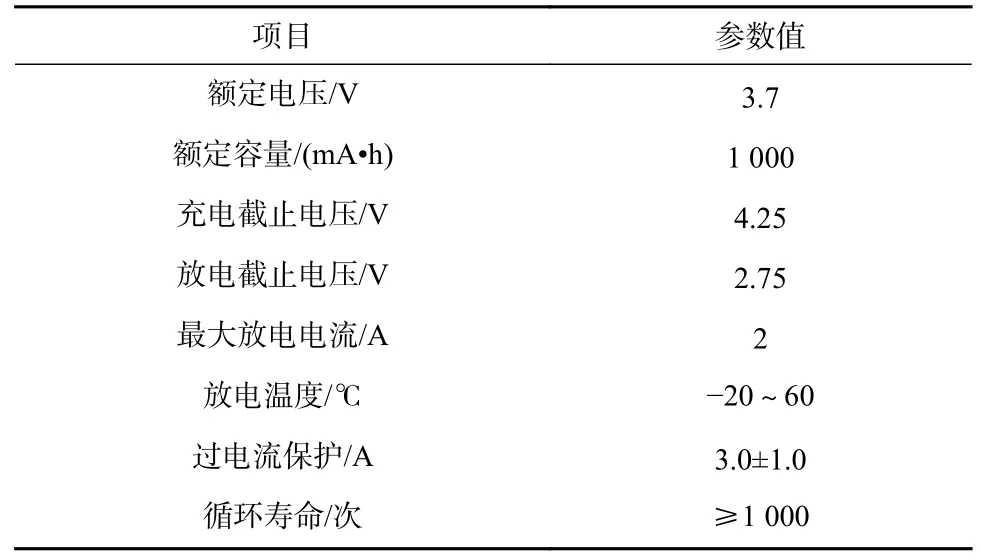
表1 试验电池的基本参数Tab.1 Basic parameters of the test battery
首先对电池进行容量测试,将电池以额定电流到恒流-恒压工步充电至截止电流,再以额定电流条件经恒流放电工步放电至截止电压,共实验3 次.然后进行开路电压测试,得到开路电压与SOC 之间的对应关系,开路电压测试步骤如表2 所示.最后进行混合功率脉冲特性(hybrid pulse power charact- erization, HPPC)测试,分别分6 步进行恒流-恒压充电、恒流放电、复合脉冲充放电的实验获取电池在不同SOC 状态下电压的动态特征参数,混合脉冲特性测试如表3 所示.单个脉冲电流循环的设置情况如图1所示.

图1 混合脉冲电流设置情况Fig.1 Mixed pulse current settings

表2 开路电压测试实验步骤Tab.2 Experimental steps for open circuit voltage test
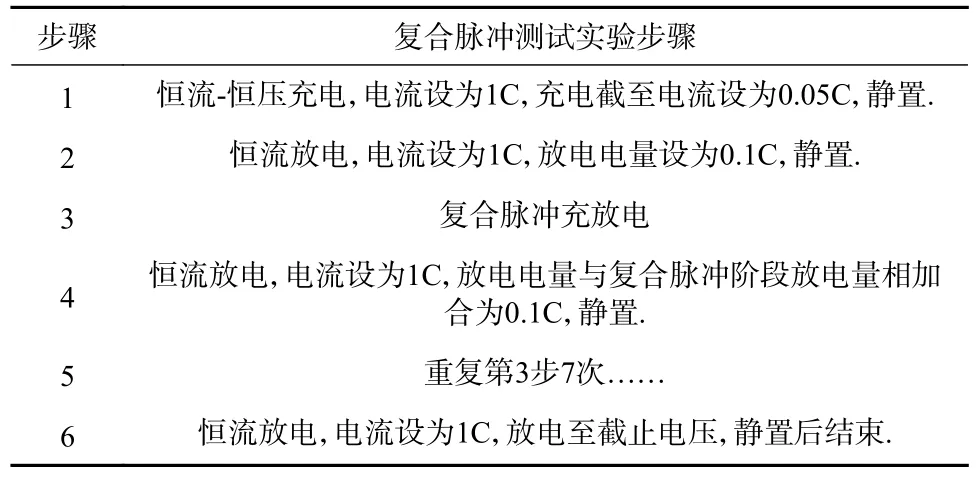
表3 HPPC 测试实验步骤Tab.3 Experimental steps for HPPC test
1.2 小波变换去噪
实验数据会因设备采集精度、环境不确定性等要素导致存在多种噪声,增加了估计的不确定度.为了减小数据噪声,可将含有噪声的数据按照多分辨率分析过程的方法进行频带细分,直到达到某一阈值,然后离散小波变量中的各细节部分当作噪声去除掉[17],只保留平滑部分直接作为最后去噪后的结果.
令
可知,ϕj,k(t)及 ψj,k(t)分 别为Vj和Wj的标准正交基.ϕj,k(t) 及 ψj,k(t)分别为尺度函数和小波函数.
因此,
式 中:Pjx(t)为x(t)在Vj上 的 投 影;为 其 离 散 逼 近;Djx(t)为x(t)在Wj上 的投影;为其离散 逼近,也就是离散二进小波变换WTx(j,k).显然,Pj−1x(t)=Pjx(t)+Djx(t).
由式(2)可得:
将式(1)及式(5)代入式(2),即可得到最终经过去噪后的信号:
根据上述小波变换理论进行去噪处理,其中文献[18]指出,选用阶次为6 的小波(db6)处理速度更快.运用Matlab 中的wavedec 等模块,对信号进行分解与重构,从而完成数据集的去噪.对于多分辨率分解层数,分解层数越多,去噪效果越好,但是收敛情况不同.对于本文设置分解层数为5~9 层并进行结果对比.图2、图3 分别为高斯白噪声条件和有色噪声条件下电压的去噪情况.

图3 电压数据添加有色噪声后不同分解层数的db6 去噪效果图Fig.3 The db6 denoising effect diagram of different decompos-ition layers after adding colored noise to the voltage data
由上图可知,综合其去噪效果与收敛速度,可知当分解层数为7 时,去噪效果最好.小波变换方法对噪声误差的去除效果较为显著,尤其针对高斯噪声情况效果更明显,误差基本能控制在 ±5 mV 以内,因此对于SOH 估计的数据预处理环节适用,能够很好地去除数据里的噪声.
2 基于多方法融合的SOC-SOH 联合估计
2.1 (PSO-DBN)-AEKF/AHIFF 算法
由于电池的状态估计受到模型参数等多种因素的影响,很难得到准确的估计结果[19].而PSO-DBN的多层结构可以提高整个模型在复杂条件下的拟合能力,并且具有较强的特征提取能力,所以对复杂工况的估计具有重要意义.其中PSO-DBN 模型的输出作为状态空间模型的观测方程,可以避免建立复杂的状态方程的问题,所以该方法更适用于动态环境.但由于在估计的过程中不可避免地涉及到测量噪声等不确定因素,因此需要应用AEKF 算法来减少不确定的影响,获得更精确地结果[20].
基于(PSO-DBN)-AEKF 的模型离散化方程:
进行初始化,设置状态观测器的初始值:x0,P0,Q0,R0
先验估计-预测:(k−1)+→k−
误差协方差矩阵预估:
后验估计-修正:k−→k+
通过k时刻的测量值对系统状态和误差协方差的预估值进行修正,其中信息矩阵:
卡尔曼滤波增益:
自适应噪声协方差匹配:
对系统状态进行修正:
误差协方差矩阵修正:
时间尺度更新:k=k+1,准备 (k+1)时刻的状态估计.
AEKF 算法只针对无噪声和高斯白噪声有较好的效果,而AHIFF 鲁棒性算法的初始参数相比于AEKF 算法更多,因此更加依赖于初始值的设定.在某些情况下,噪声情况既不是 AEKF 前提条件中的高斯白噪声,也不是 AHIFF 前提条件中的纯随机噪声,而是介于两者之间的复杂噪声.其中,为了减小噪声的影响,提高PSO-DBN 的鲁棒性,将PSO-DBN模型与AHIFF 算法进行融合可以有效的减小测量噪声.所以本文结合两者优点的方法,提出了粒子群优化深度置信网络和自适应扩展卡尔曼/自适应Hm滤波融合算法((PSO-DBN)-AEKF /AHIFF).基于融合滤波器,建立(PSO -DBN)-AEKF /AHIFF 估计模型.
对于AEKF 算法,其信息矩阵的方差为
如果不等式(17)成立的话,那么AEKF 估计结果就会发散.
式中,λ为安全系数.
同时为了减少噪声造成的影响,对过去一段时间的指标Jk取均值,得到:
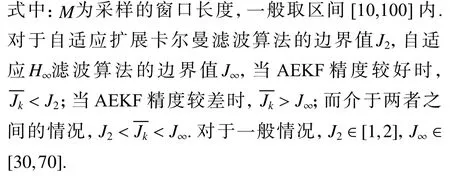
其中,权值di为
其中,a和b由经验所得.
2.2 多方法融合的SOC-SOH 联合估计方法
基于粒子群优化置信网络与卷积神经网络的SOC-SOH 的联合估计方法在数据较为准确时估计迅速且精度较好,然而在输入数据时会受到噪声的干扰,估计方法会存在较大的误差.因此在此用到前文提到的小波变换的方法进行去噪,去噪后再和卷积神经网络来完成联合估计.基于多方法融合的联合估计算法结构示意图如图4 所示.
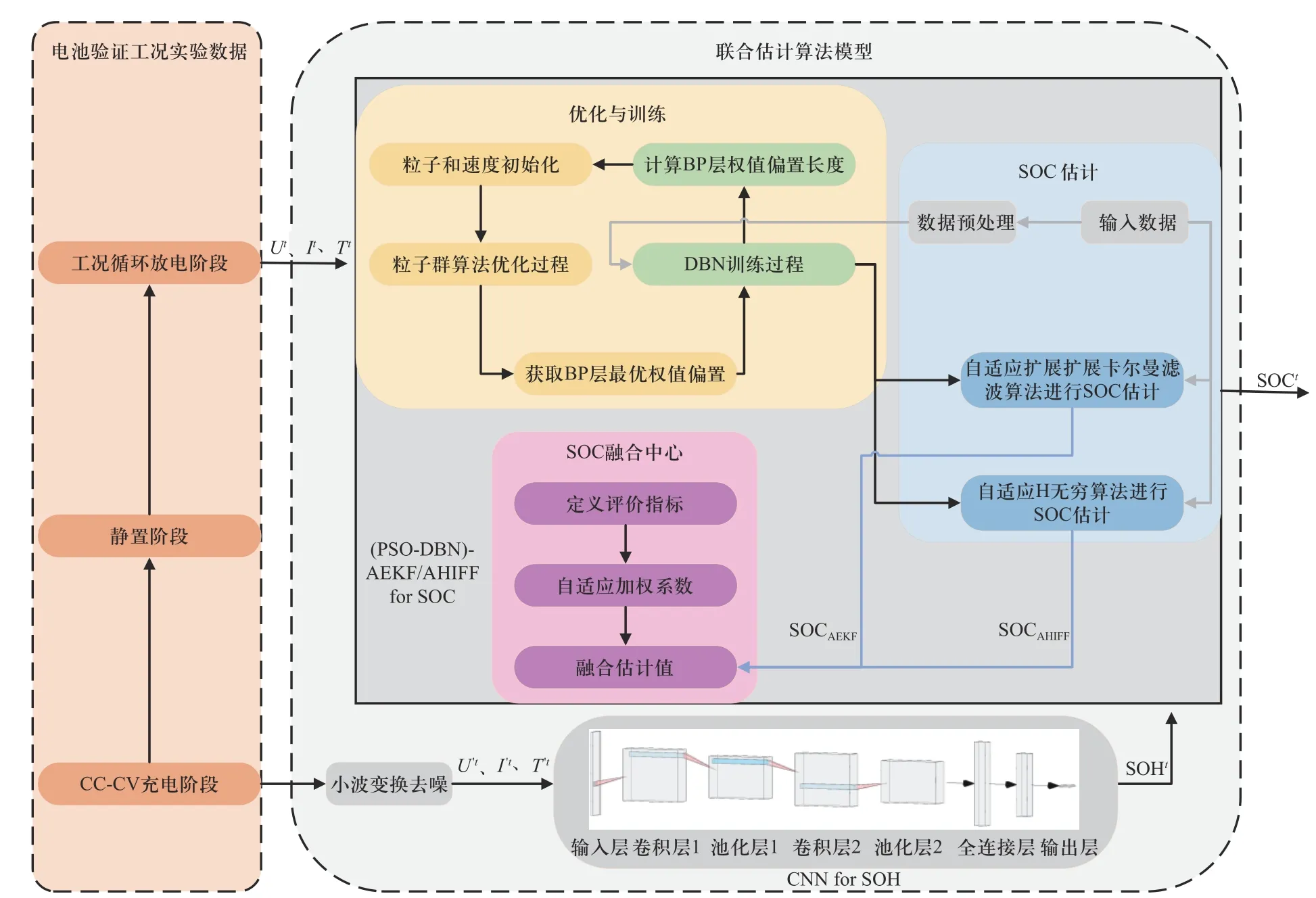
图4 (PSO-DBN)-AEKF/AHIFF 与CNN 的SOC-SOH 联合估计方法示意图Fig.4 (PSO-DBN) -Schematic representation of the combined SOC-SOH-estimation method for AEKF / AHIFF and CN
多方法融合的SOC-SOH 联合估计具体流程为:
①训练数据使用.提取锂离子电池验证实验CC-CV 充电阶段数据用于当前条件下的SOH 估计,即用于卷积神经网络估计SOH;提取工况循环放电阶段实验数据用于SOC 估计,即用于粒子群优化深度置信网络估计SOC.SOC 估计的训练输入数据为电压、电流、温度以及第一阶段的SOH 估计值;
同时,提取上位机中该充电阶段的充电量,利用安时积分法计算得到的实际SOC 值作为训练输出.对于当前验证工况下,每一时刻锂离子电池SOC 估计所使用的SOH 估计值是不变的.
②建立卷积神经网络模型和基于深度置信网络和自适应扩展卡尔曼/自适应H∞滤波融合算法模型并初始化网格参数,建立的卷积神经网络的结构如图5 所示,其中CC-CV 充电工步的电压、电流、温度等数据,作为卷积神经网络的训练输入.同时,提取上位机中该充电工步的充电量,其与未老化时的容量的比值即为锂离子电池当前的SOH,作为卷积神经网络的训练输出.选取12 层的CNN 网络结构,并初始化网络参数,然后通过卷积神经网络的训练,进而完成锂离子电池SOH 估计.
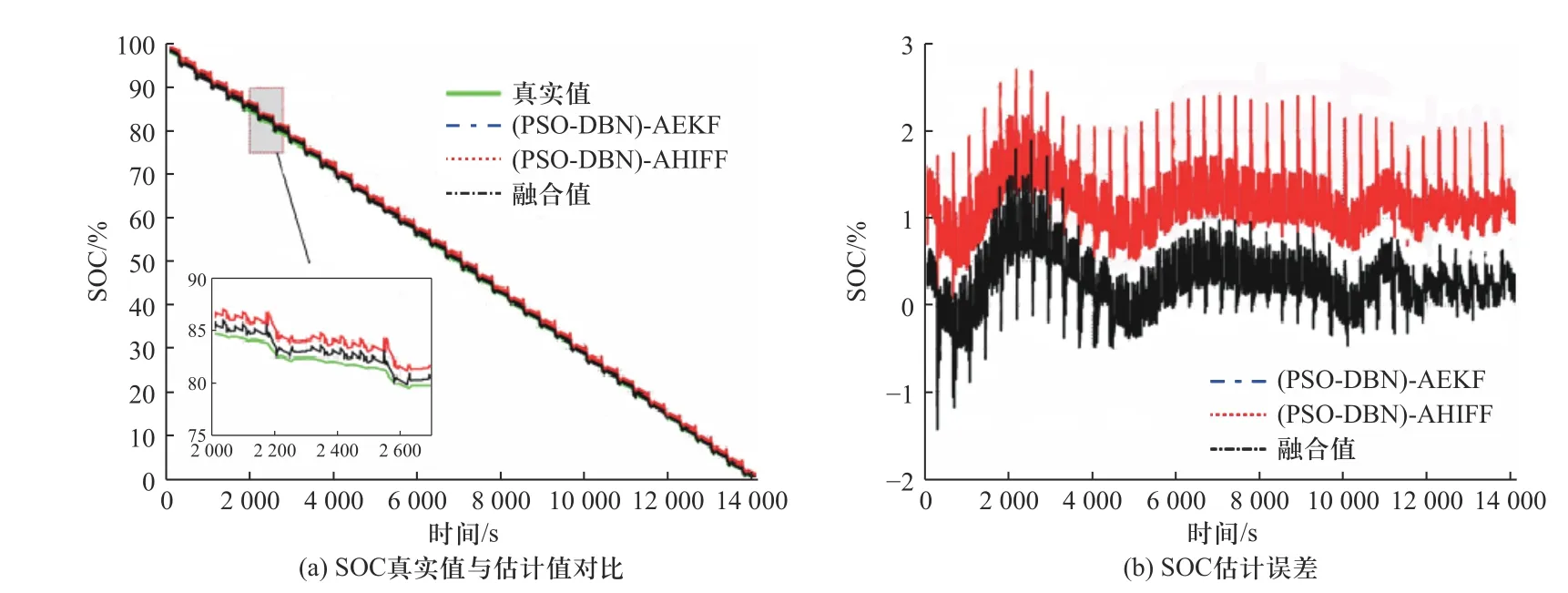
图5 基于 DST 工况的不同估计算法的 SOC 估计结果Fig.5 SOC estimation results of different estimation algorithms based on DST conditions
③SOC-SOH 联合估计模型训练.
④完成锂离子电池SOC-SOH 的联合估计.首先先运用小波变换方法对SOH 测试数据进行去噪处理,再将采集量输入训练好的联合估计网络结构中,输出SOC 估计值并与实际的SOC 估计值进行对比,以验证基于多方法融合的联合估计算法的有效性.
2.3 联合估计方法仿真验证
由于NEDC 工况与实际情况之间存在较大的差异,而刚提出WLTC 工况存在车速波动大、燃油消耗高、续航里程低等缺点,不能更好的应用于电池的SOC 和SOH 的联合估计上,所以采用DST 工况和UDDS 工况数据来验证多方法融合的联合估计算法的有效性.
选取两个锂离子电池验证实验数据集中的工况循环放电阶段记录了锂电池使用过程中的电压、电流、温度数据,并将锂离子电池在0℃、10℃、40℃下的DST 工况循环放电阶段的实验数据作为训练样本代入模型,得到SOC 估计的训练模型,然后基于CC-CV 充电阶段的充电容量与未老化时的容量的比值,作为锂离子电池当前的SOH,并选取25℃温度下实验数据作为训练样本,对CNN 算法模型进行训练,为了验证多方法融合算法的有效性,分别对电压、电流引入高斯白噪声,最后用粒子群优化深度置信网络与卷积神经网络算法完成数据驱动模型的训练.
2.3.1 DST 工况数据分析
以电池在第3 个容量点的联合估计结果进行结果分析.
无噪声条件下的SOC 估计精度评估如图5 所示.
图5 表明,在无噪声条件下,(PSO-DBN)-AEKF算法得到SOC 联合估计值要略优于(PSO-DBN)- AHI FF 算法,最终的SOC 融合估计曲线与(PSO-DBN)-AEKF 算法的SOC 估计曲线完全重合,融合方法的SOC 误差更小,使得估计的准确率显著提升.
高斯白噪声条件下的SOC 估计精度评估如图6所示.

图6 数据添加高斯白噪声后不同估计算法的SOC 估计结果Fig.6 SOC estimation results of different estimation algorithms after adding Gaussian white noise to the data
图6 表明,在数据添加了高斯白噪声后,(PSODBN)-AEKF 算法得到的SOC 联合估计值仍然略优于(PSO-DBN)-AHIFF 算法,同样,最终的SOC 融合估计曲线与(PSO-DBN)-AEKF 算法的SOC 估计曲线完全重合,表明AEKF 算法在高斯白噪声条件下具有更加优秀的滤波性能,SOC 的估计精度提高了10%.
2.3.2 UDDS 工况数据结果与分析
利用UDDS 工况数据对DST 工况训练模型进行测试,以验证估计算法的适用性.
无噪声条件下的SOC 估计精度评估如图7 所示.

图7 基于UDDS 工况的不同估计算法的SOC 估计结果Fig.7 SOC estimation results of different estimation algorithms based on UDDS operating conditions
图7 表明,在无噪声条件下,(PSO-DBN)-AEKF算法得到的SOC 联合估计值总体略优于(PSO -DB N)-AHIFF 算法,而对于最终的SOC 融合估计值,在前1 000 s 内的某些时刻,AEKF 的滤波估计值误差较大,此时SOC 融合估计器起作用,对SOC 估计结果进行了一定修正,而在其余大部分情况下,SOC 融合估计曲线与(PSO-DBN)-AEKF 算法的SOC 估计曲线完全重合,除开某些时刻,最终的SOC 估计误差限定在了1.8%以内,且误差的波动幅度减缓.
高斯白噪声条件下的SOC 估计精度评估如图8所示.
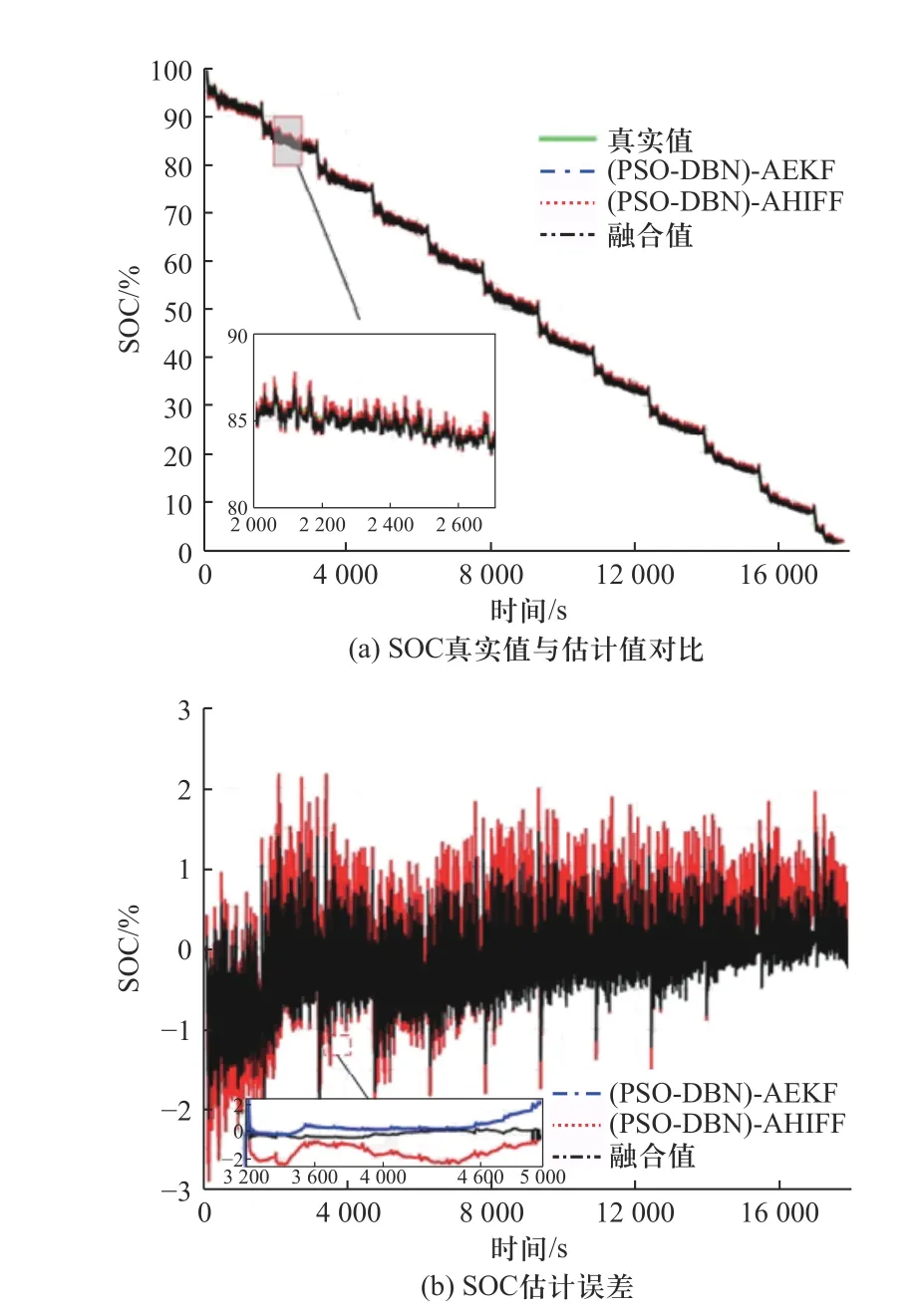
图8 数据添加高斯白噪声后不同估计算法的SOC 估计结果Fig.8 SOC estimation results of different estimation algorithms after adding Gaussian white noise to the data
图8 同样表明,在数据添加了高斯白噪声后,(PSO-DBN)-AEKF 算法的估计误差基本维持在2.1%以内,而(PSO-DBN)-AHIFF 算法的估计结果波动幅度相对偏大一些,但最终的SOC 融合估计曲线与(PSO-DBN)-AEKF 算法的SOC 估计曲线完全重合,这体现了AEKF 算法在高斯白噪声条件下具有更加优秀的滤波性能,误差在0 附近波动,且波动率小.
2.4 联合估计方法实验验证
为了进一步验证基于多方法融合的SOC-SOH联合估计的有效性,采用搭建硬件在环测试平台进行验证,该实验平台主要包括电池充放电设备、高低温实验箱、上位机、电池、传感器、汉象Typhoon HIL602+等.验证还是基于DST 工况和UDDS 工况下进行充放电,分为2 步进行,第1 步是SOH 估计过程,第2 步是SOC 估计过程.硬件在环仿真结果表明,在Typhoon HIL 的采集数据存在一定有色噪声的前提下,基于多方法融合算法的SOC 与SOH 联合估计方法的估计误差在2%以内,并且SOH 的估计结果为82.7%,而实际的SOH 结果为81.9%,SOH 的误差在1%以内,证明联合估计方法具有一定的精度和鲁棒性.实验结果如图9~10 所示.

图9 基于DST 工况的台架验证不同算法的SOC 估计结果Fig.9 SOC estimation results of different algorithms in the verification experiment based on DST conditions
从图9 可以看出,PSO-DBN 算法的误差明显较大,(PSO-DBN)-AEKF 算法虽能有效抑制噪声,但误差仍较大,而与AHIFF 算法进行融合后,估计效果具有显著的改善.从图10 中也可以看到与图9 相同的效果,验证结果表明随着算法的递进,估计效果越来越好,估计误差维持在2%以内,证明了联合估计算法在实际使用条件下估计精度更高,更加适用于工程实际应用.

图10 基于UDDS 工况的验证实验不同算法的SOC 估计结果Fig.10 SOC estimation results of different algorithms in the verification experiment based on UDDS conditions
3 结 论
由于锂离子电池实际使用情况下无法直接测量容量或内阻得到锂离子电池SOH,所以需要间接通过电池可直接测量的数据来等价表示锂离子电池当前的SOH,得出以下结论:
①由于电池SOC 与SOH 具有不同的时变特性,本文提出的基于(PSO-DBN)-AEKF/AHIFF 的SOC 估计及基于CNN 的SOH 估计相结合的多方法融合算法,以验证工况中的充电阶段的时间序列数据SOH估计输入,以验证工况中的工况循环充电阶段的采样时刻数据作为SOC 估计输入,完成SOC 和SOH特性的耦合分析.结果表明,联合估计后的SOC 估计误差对于无噪声条件的估计精度在1.8%以内,对于高斯白噪声条件在2%以内,表明融合算法在复杂工况中能提高估计精度,对估计有更为准确的跟踪.
②通过搭建硬件在环测试的实验验证,对输出结果与真实值进行分析比较,从而对估计算法的实时性及有效性进行分析.结果表明,基于多方法融合的锂离子动力电池荷电状态与健康状态联合估计算法在实际条件下,荷电状态与健康状态的估计误差均在2%以内,说明该算法具有一定的准确率和鲁棒性的同时,可以兼顾到一定的实时性特征.
锂离子电池联合估计是全新研究的热门领域,研究的重点是让估计速率提升的同时准确率也相应地提高,但对于估计从电池单体扩展到电池组也将是未来该领域重要的研究的方向之一.
