基于轨道系太阳矢量的卫星自主任务规划设计
2023-06-25王国华常亮吴会英唐涛王明亮
王国华,常亮,吴会英,唐涛,王明亮
(1.中国科学院微小卫星创新研究院,上海 201203;2.上海微小卫星工程中心,上海 201203)
卫星任务规划从体系化应用来看属于资源管理的一部分.目前,卫星任务规划大多以地面离线规划为主,采用复杂的算法对观测目标、星上载荷资源、地面站资源等进行合理调度,实现观测任务.2000 年,美国国家航空航天局(NASA)就开发了ASPEN[1]和CASPER[2]两大卫星任务规划系统,ASPEN 可针对观测目标,自动生成每日工作计划,CASPER 提出一种实时重规划机制,可基于固定的时间或事件步长采集系统状态和目标,并在此基础上进行重规划.文献[3 − 5]对星座协同自主任务规划进行了研究,分别提出了集中协调式规划策略、多智能体协作模型以及基于效用的后悔博弈等分布式协商策略;关宁等[6]结合敏捷卫星任务规划等提出了基于在轨任务规划的开发需求[7],提出了使用动态语言和大型嵌入式操作系统进行在轨任务规划的开发方法;邓宝松等[8]提出了卫星在轨应急任务规划、多系统协同任务规划、高低轨卫星联合任务规划、低轨组网卫星任务规划一体化、星地协同任务规划等技术;薛志家等[9]提出了一种突发性任务自主规划方法,该算法能够处理时间窗口约束,求得完成目标任务所需的时序规划解,经过地面系统规划后,生成指令序列,由地面测运控系统上注至卫星,卫星严格按时序执行指令序列中的指令,完成载荷观测任务.此方式优点是操作模式简单、实用、星上软件压力较小,但是由于任务规划大部分功能都在地面进行,导致人工操作压力大且易出错,一旦指令序列未能及时上注,则导致观测任务不能及时完成或观测时间减少的结果.
星上综合电子系统的处理器主频已经达到200 MHz以上[10−11],使用经过筛选的工业级处理器更是能够达到1 GHz,结合较大的内存容量,完全有能力将地面任务规划部分功能转移到星上处理.
太阳同步近圆轨道卫星轨道平面和太阳始终保持相对固定的取向,轨道的倾角接近90°, 从相同的方向经过同一纬度的当地时间是相同的,该特性为基于太阳矢量进行自主任务规划提供了有利条件,目前国内对此方向研究较少.本文提出了一种基于轨道系太阳矢量的卫星星上自主任务规划方法,该方法可以减少地面上注指令条数,节省测控资源,降低任务出错概率,提高星上智能化水平,对重复观测某特定目标具有较好的效果.
1 卫星任务规划约束优化模型
1.1 载荷任务约束条件
卫星在轨运行受到载荷、能源、温度、姿态、轨道以及观测目标等环境影响,无法实现长时间不间断任务观测,为了充分利用星上资源,实现精准观测,需要综合星上以及地面条件,及时调整观测策略.而完全依赖地面系统进行任务规划会导致指令序列中的指令快速增长,目前国内测运控系统资源有限,卫星入境时间较短,较大的指令序列有可能上注失败.
1.2 卫星任务规划约束优化模型
太阳同步轨道(Sun-synchronous orbit, or heliosynchronous orbit , SSO)是一种极地轨道.对于一颗太阳同步圆轨道卫星,定义卫星质心轨道坐标系(VVLH坐标系),Z轴为卫星到地球质心连线,指向地球质心;Y轴与轨道平面负法线方向一致,X轴与Y、Z轴成右手正交系,在轨道平面指向前进方向(若为圆轨道则与速度方向一致),如图1 所示.
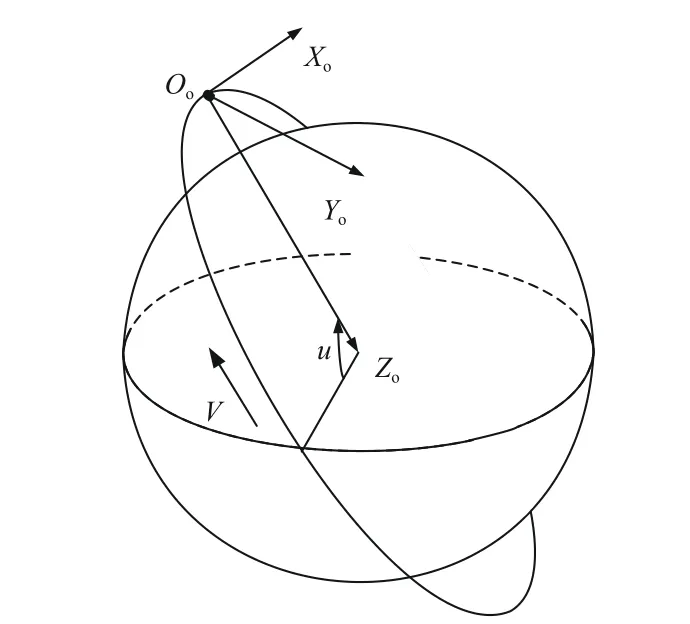
图1 VVLH 坐标系Fig.1 VVLH coordinate system
卫星姿控模块根据太阳星历模型和轨道数据经过推导可得出归一化的轨道系太阳矢量μso.太阳矢量μso在VVLH 系下的各个角度定义如图2 所示:其中φ角为太阳矢量μso在轨道面的投影与Z轴的夹角,绕Y轴为正;α角为太阳矢量μso与其在XOY平面的投影的夹角(即太阳高度角),朝向Z轴为负;β角为太阳矢量μso与其在轨道面投影的夹角(即轨道太阳角),朝向Y轴为负;θ角为太阳矢量μso的投影与X轴的夹角,绕Z轴为正.根据轨道特性,φ角在[−π,π]内做线性变化,β角大小在一定时期内几乎不变,由此可推导出太阳的位置即太阳高度角α到达时的星上时刻T,根据地面上注的太阳高度角αflag计算出每个任务的开始结束时刻Tflag,αflag和Tflag定义如下

图2 太阳矢量在轨道坐标系下的角度示意图Fig.2 Angle diagram of solar vector in orbital coordinate system
2 基于轨道系太阳矢量卫星自主任务规划设计
2.1 角度计算
由图2 可推导出太阳矢量和各个夹角的关系如下
由式(3)可得出α、β、θ、ϕ计算公式
ϕ角与α、β角的关系如式(8)和(9).
太阳升起阶段
太阳降落阶段
由ϕ和β计算α的公式如式(10)
θ角与α和β的计算公式如式(11)、(12).
太阳升起段
太阳降落段
2.2 自主任务规划算法设计
若已知地面任务规划系统设计的任务观测时刻的太阳高度角α的值(可通过指令上注修改),则可由α、β计算出观测时刻的ϕ值.由于ϕ值做线性变化,由此可推导出任务开始和结束观测的星上时刻Tflag(i)(i=1,2,)···,如式(11),星载软件每隔一段时间计算Tflag(i),消除误差.当星上时等于Tflag(i)时,星载软件的自主任务管理模块根据当前卫星能源情况、卫星姿态等信息,输出相应指令,执行相关操作,开始或结束任务观测.
式中:Tflag(i)为任务观测的起止星上时刻点;ϕα为开始观测时刻太阳高度角对应的ϕ值;ϕnow为当前星上时的ϕ值;Tsat为星上时当前时间;ω为飞行器轨道角速度,由轨道模块给出.
3 系统实现及验证
3.1 系统实现
依据上文描述算法在某卫星上进行了软件实现.该卫星搭载7 个载荷,另外安装了转台用来与平台共同实现指向精度,同时对观测目标有多次重复观测需求.
星载软件采用任务模式字对任务进行区分,地面上注修改任务模式字指令实现任务切换,不做任何任务时可设置空闲模式字,卫星姿态调整为竖立对地、转台和载荷关机,整星处于待命状态.每个任务再细分子任务,每个子任务对应子模式字,子模式字由星上根据观测时段自主设置.通过太阳矢量计算任务的起止时刻.任务观测流程如图3所示.

图3 任务流程Fig.3 Task flow chart
应用户要求,该卫星对日观测任务依据太阳高度角分7 个观测阶段,有互斥要求.为充分利用卫星资源,星上将任务安排在一轨内进行,每个观测阶段定义为一个子任务,典型观测需求(星上默认参数)如表1 所示.

表1 任务对应开始结束时刻Tab.1 Task corresponding start and end time
地面规划任务时需提前上注任务模式字,以便星上软件提前调整卫星姿态,配置载荷参数等操作.接收到对日观测任务模式字后,星上软件根据式(9)和(10)计算转台转动的角度,根据式(6)和(7)分别计算出太阳升起和降落阶段太阳高度角为−17°、−13°、−5°、5°、20°左侧和右侧75 s 时刻以及高度角最大值的左侧和右侧75 s 时刻的φ角,然后再根据式(11)计算各个观测阶段起止时刻Tflag(i)以及各个关键时间点.设地面上注任务模式字指令执行时刻为T0,星上软件处理流程见表2 和图4.
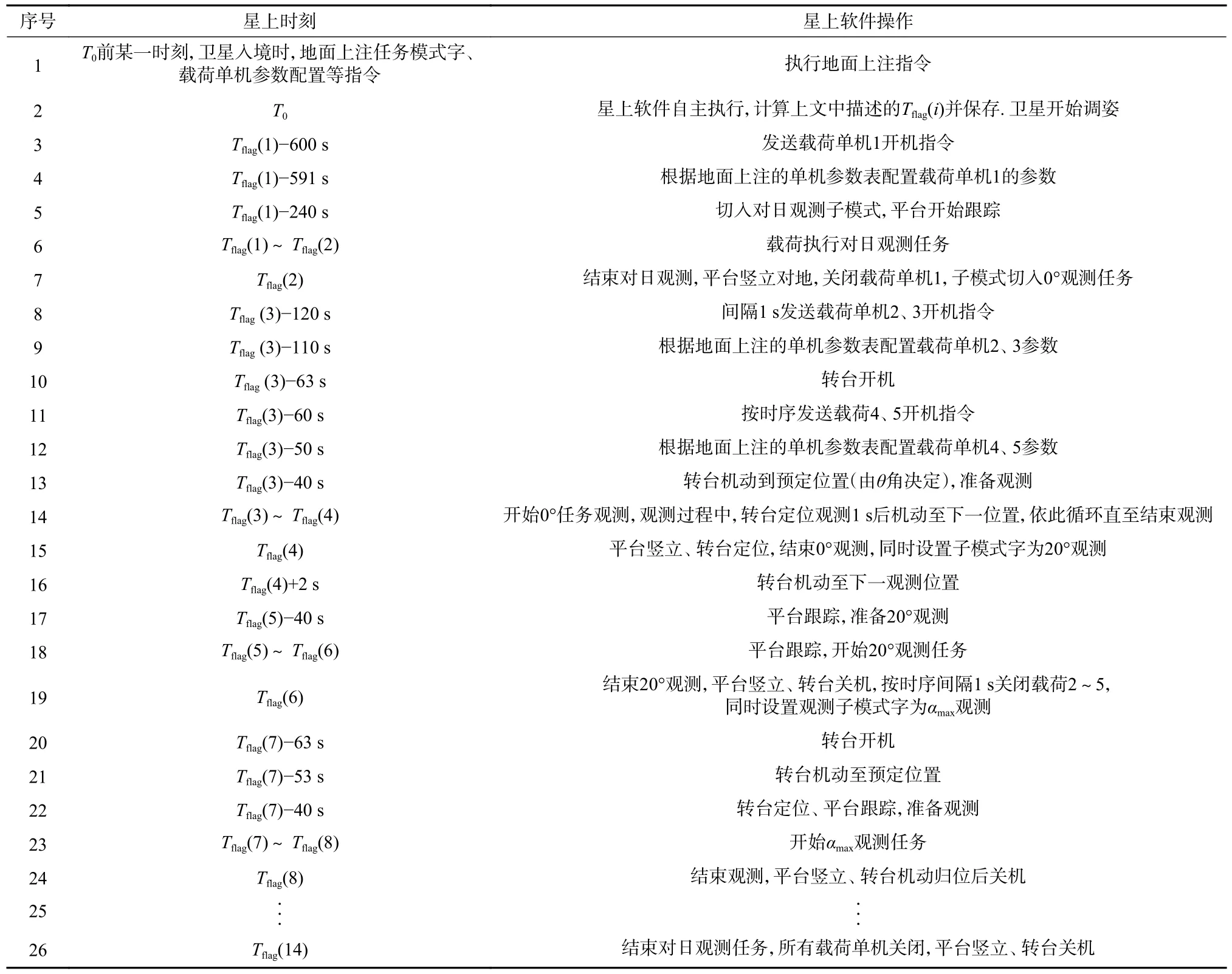
表2 星上软件任务流程Tab.2 Task flow on board software
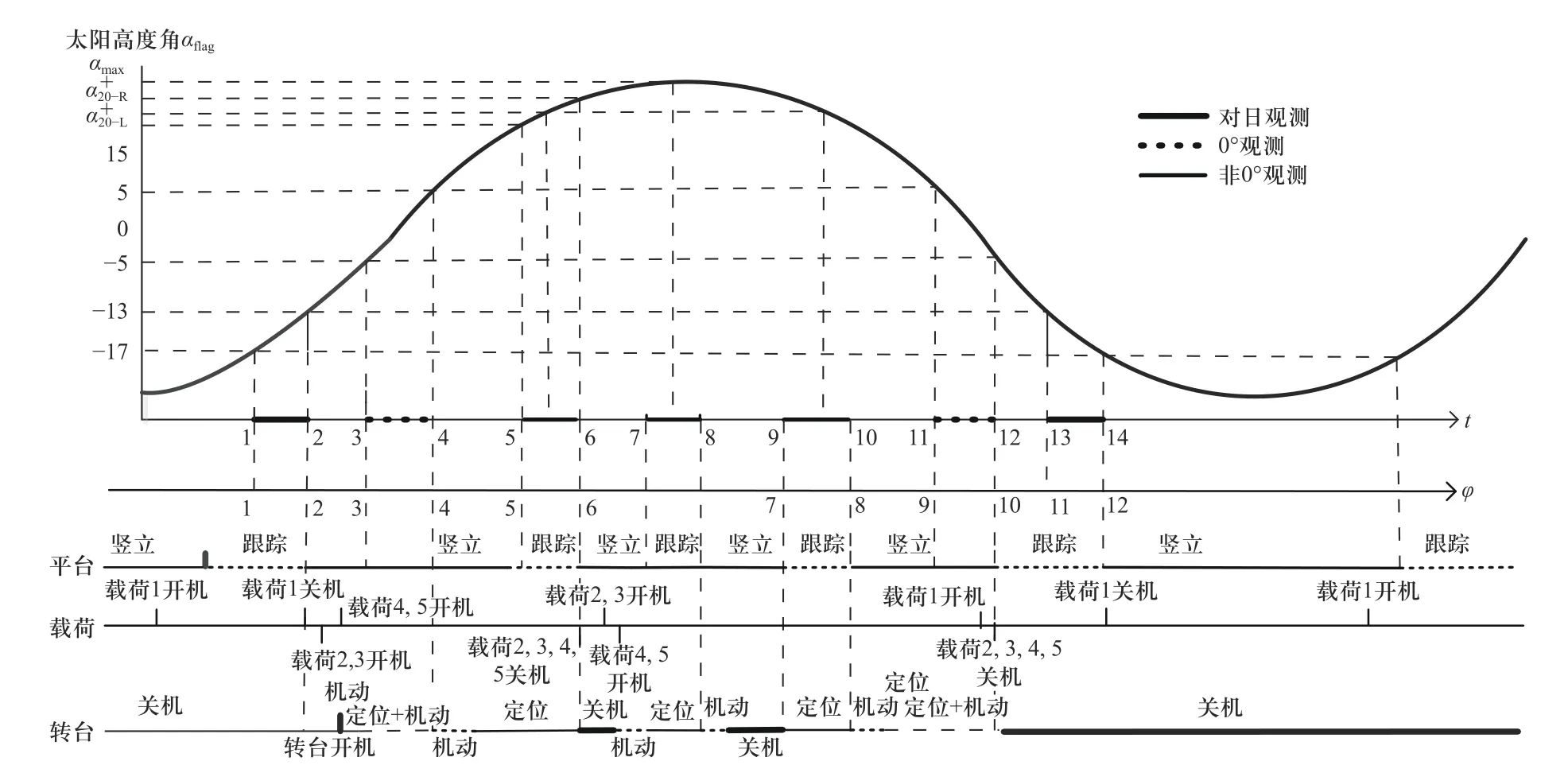
图4 星上软件时序示意图Fig.4 Timing diagram of onboard software
表2 和图4 仅描述了太阳升起阶段任务自主执行过程,降落阶段与升起阶段流程大致相同,此处不再赘述.图4 为示意图,实际软件实现中还涉及到载荷单机参数配置,与载管通信等操作.
3.2 星上验证
卫星星载计算机采用SPARC 处理器,VxWorks操作系统,软件运行周期4 Hz,搭载转台、光学相机、红外相机等载荷,轨道高度280 km,星上轨道外推采用J2 地球扁率摄动模型,采用本文所述算法实现星上自主任务规划.在地面测试阶段,为了对比精度,STK 也采用了J2 摄动,仿真用的HPOP 高精度瞬时根数外推,轨道根数输入如图5 所示.

图5 STK 仿真使用的轨道根数Fig.5 Orbital elements used in STK simulation
仿真输出的太阳方位角(right ascension)和俯仰角(declination,为高度角的负值)如图6 所示.

图6 STK 仿真太阳方位角和俯仰角Fig.6 Right ascension and declination in STK
星上软件配合导航星模拟器和动力学进行验证,通过地测软件界面查看Tflag(i),结果如图7 所示.

图7 星上软件运行结果截图Fig.7 Screenshot of on-board software operation results
将STK 仿真结果与星上软件运算结果进行比较,结果见表3.由表3 可以看出,任务起止时刻星上软件计算结果与STK 仿真结果相差1 s 以内,误差在用户可以接受的5 s 以内.

表3 星上软件计算结果与STK 仿真结果对比Tab.3 Comparison between on-board software calculation results and STK simulation results
星上自主任务规划需上注指令条数与通过地面遥控系统上注指令序列形式对比如表4.

表4 本算法与传统方式上注指令数量对比Tab.4 Comparison of the number of instructions between this algorithm and the traditional method
4 结 论
本文提出了基于轨道系太阳矢量实现星上自主任务规划的方法,提升了观测时间利用率以及星上自主任务规划能力,通过某卫星在轨实践结果表明:基于轨道系太阳矢量进行星上任务规划能够将可见的观测时间窗口离散化,减少地面上注指令序列条数约60%,节省了测控通道资源、减少人工干预,同时该方法可实现同一轨做不同的互斥任务,提高了星上资源使用效率,对后续卫星的星上自主任务规划有借鉴意义.
